Изобретение относится к системам автоматической посадки летательных аппаратов и может быть использовано для автоматической посадки как пилотируемых, так и беспилотных летательных аппаратов, а также воздушно-космических летательных аппаратов.
Известна система автоматической посадки летательного аппарата, основанная на распознавании и выделении образа объекта на окружающем фоне и отслеживании выбранного объекта, содержащая последовательно соединенные инерциальную навигационную систему, систему распознавания и отслеживания образа, бортовую цифровую вычислительную систему, схему формирования приоритетов, причем с первого выхода которой информация поступает на вход бортовой цифровой вычислительной машины и на входы системы распознавания и отслеживания образа, выход которой соединен с входом схемы формирования приоритетов. В схеме имеется задатчик траектории, информация с выходов которого поступает на вход системы распознавания и отслеживания образов.
Недостатками известной системы являются:
- недостаточная автономность системы, так как для ее функционирования требуется установка специальных контрольных ориентиров. Это обстоятельство не позволяет выполнять посадку на необорудованные аэродромы и площадки, что значительно сужает диапазон ее применения;
- низкая помехозащищенность устройства слежения, т.к. при изменении расположения ориентиров либо при изчезновении одного или появления дополнительного ориентира происходит срыв слежения;
- жесткие требования по точности вывода ЛА в створ взлетно посадочной полосы;
- отсутствие учета угла атаки при снижении по траектории, что приводит к недостаточной точности вывода самолета в заданную точку посадки.
Целью изобретения является повышение автономности, точности и помехозащищенности, а также повышение надежности системы автоматической посадки.
Цель достигается тем, что в систему автоматической посадки, содержащую последовательно соединенные инерциальную навигационную систему, систему распознавания и отслеживания образа, бортовую цифровую вычислительную машину, корреляционно-экстремальную навигационную систему, один выход которой подключен к входу бортовой цифровой вычислительной машины, другой подключен к одному из входов схемы формирования приоритетов, выходы которой подключены к входам системы распознавания и отслеживания образа, один из выходов которой подключен к входу схемы формирования приоритетов, другие входы которой соединены с выходами задатчика траектории, введены телевизионный координатор с корреляционной обработкой информации с угломерным блоком и импульсный лазерный дальномер, установленные на подвижной платформе с сервоприводом, а также видеоконтрольное устройство, устройство ручного управления и переключатель режимов работ, причем выход импульсного лазерного дальномера и выходы угломерного блока через первую группу замыкающих контактов переключателя режима работы подключены к соответствующим входам бортовой цифровой вычислительной машины, выходы задатчика траектории через первую группу размыкающих контактов переключателя режима работы подключены к входам системы распознавания и отслеживания образов и входам сервопривода подвижной платформы, дополнительно соединенные через вторую группу замыкающих контактов переключателя режимов работы с выходами устройства ручного управления, при этом выходы системы распознавания и отслеживания образов подключены к входам бортовой цифровой вычислительной машины через вторую группу размыкающих контактов переключателя режимов работы, видеовыход телевизионного координатора с корреляционной обработкой подключен к входу видеоконтрольного устройства, а следящий выход телевизионного координатора с корреляционной обработкой соединен с входом сервопривода подвижной платформы.
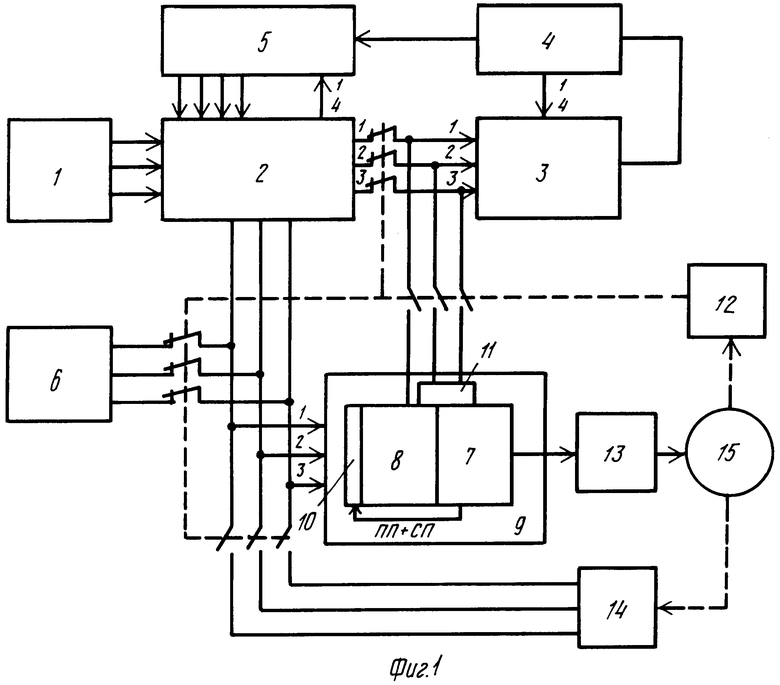
Схема системы представлена на фиг.1; пространственное положение летательного аппарата приведено на фиг.2.
Система содержит инерциальную навигационную систему 1, систему 2 распознавания и отслеживания образа, бортовую цифровую вычислительную машину 3, корреляционно-экстремальную навигационную систему 4, схему формирования приоритетов 5, задатчик траектории 6, телевизионный координатор 7, импульсный лазерный дальномер 8, установленные на одной платформе 9, оборудованной сервоприводом 10 и угломерным устройством 11, переключатель 12 режимов работы, видеоконтрольное устройство 13, устройство 14 ручного управления, управляемого летчиком 15.
Система работает следующим образом.
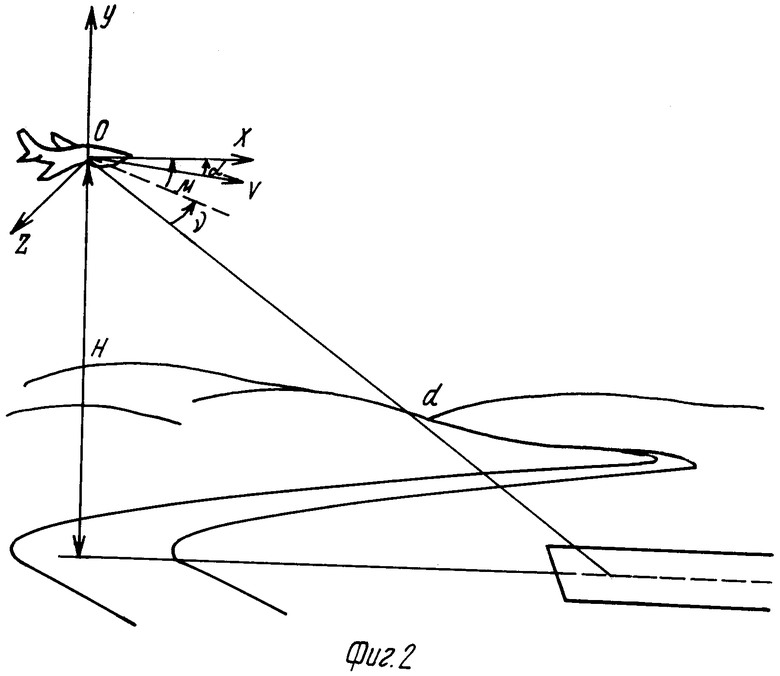
С помощью корреляционно-экстремальной системы 4 или других навигационных средств летательный аппарат выводится в район предполагаемой посадки на заданной высоте. По достижении заданной дальности включается задатчик траектории 6, который осуществляет предварительную ориентацию системы 2 распознавания и отслеживания подвижной платформы 9. В случае посадки на необорудованный аэродром или площадку или выхода из строя группы контрастных ориентиров, а также в случае плохой видимости летчик ставит переключатель 12 режимов работ в положение "Посадка по ТК", при этом размыкается одна группа контактов и замыкается другая группа контактов. Летчик по изображению участка подстилающей поверхности, поступающего с видеоконтрольного устройства 13, с помощью устройства 14 ручного управления совмещает оптическую ось телевизионного координатора 7 с некоторой точкой на предполагаемой взлетно-посадочной полосе, выбранной с учетом этапа выравнивания. После задания таким образом точки приземления телевизионный координатор 7 переводится в режим слежения. Изображение выбранного участка подстилающей поверхности, полученное в этот момент, запоминается в памяти телевизионного координатора 7 и является эталонным. Далее текущее изображение корреляционным способом сравнивается с эталонным, вырабатывается сигнал рассогласования и осуществляется коррекция телевизионного координатора 7 путем разворота его оптической оси, т.е. телевизионный координатор 7 постоянно направлен на выбранный участок подстилающей поверхности. Сигналы, пропорциональные текущим значениям углов визирования μ и ν с выхода угломерного устройства 11 и сигнал, пропорциональный дальности d с выхода лазерного дальномера 8, поступают на соответствующие входы бортовой цифровой вычислительной машины 3 для формирования сигналов управления летательного аппарата заданного угла тангажа
Vз = θз + μ и заданного путевого угла
Ψз = ϕ + ν , где θз - заданный угол наклона траектории;
ϕ - сигнал рассогласования между текущим курсом самолета и курсом посадочной площадки;
μ - угол визирования в вертикальной плоскости - угол между проекцией продольной оси самолета и оптической оси телевизионного координатора 7 на вертикальную плоскость;
ν - угол визирования в боковой плоскости - угол между проекциями продольной оси самолета и оптической оси телевизионного координатора 7 на горизонтальную плоскость.
Следует отметить , что при таком способе формирования Vз и Ψзобеспечивается выполнение равенства α = μ (α - угол атаки) и β = ν (β - угол скольжения), что означает, что вектор скорости летательного аппарата совмещается с оптической осью телевизионного координатора 7. Таким образом, летательный аппарат летит точно по заданной траектории. Сигнал, пропорциональный дальности d, до расчетной точки поступает с выхода лазерного дальномера 8 на первый выход бортовой вычислительной машины 3 для формирования сигналов начала снижения и начала выравнивания, а также для обеспечения сочленения глиссады с осью взлетно-посадочной полосы при помощи экспоненты:
θз= θoe
В случае использования системы на беспилотном летательном аппарате сигнал изображения участка подстилающей поверхности передается по линии связи на видеоконтрольное устройство, расположенное на наземном пункте управления, оператор которого, используя это изображение, управляет по линии связи сервоприводом платформой 9 с целью совмещения оптической оси телевизионного координатора 7 и выбранной точки приземления.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОЛУЧЕНИЯ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ДЛЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ (БЛА) | 2011 |
|
RU2466355C1 |
| СИСТЕМА ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2008 |
|
RU2386176C2 |
| ПОРТАТИВНЫЙ КОМПЛЕКС ВОЗДУШНОГО БАЗИРОВАНИЯ ОПТИКО-ВИЗУАЛЬНОГО МОНИТОРИНГА | 2006 |
|
RU2320519C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГРУППОЙ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2834270C1 |
| Пилотажно-навигационная система транспортного летательного аппарата | 2024 |
|
RU2822088C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2837059C1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2001 |
|
RU2189625C1 |
| СИСТЕМА РАЗВЕДКИ НАЗЕМНЫХ ОБЪЕКТОВ И ЦЕЛЕУКАЗАНИЯ | 2016 |
|
RU2625691C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА УПРАВЛЕНИЯ КОРАБЕЛЬНОЙ АРТИЛЛЕРИЙСКОЙ УСТАНОВКОЙ | 2024 |
|
RU2828168C1 |
| Способ управления вооружением многофункциональных самолетов тактического назначения и система для его осуществления | 2020 |
|
RU2748133C1 |
Изобретение относится к системам автоматической посадки летательных аппаратов и может быть использовано для автоматической посадки пилотируемых и беспилотных летательных аппаратов. Цель изобретения - повышение точности, автономности, надежности и помехозащищенности системы автоматической посадки. С помощью корреляционно-экстремально-навигационной системы или других навигационных средств летательный аппарат выводится в район предполагаемой посадки на заданной высоте. По достижении заданной дальности летчик совмещает с помощью устройства ручного управления центр растра видеоконтрольного устройства с расчетной точкой приземления, обеспечивая тем самым наведение оптических осей телевизионного координатора и лазерного дальномера и введение в память коррелятора телевизионного координатора эталонного изображения. После этого в режиме автосопровождения производится отслеживание корреляционным способом выбранного участка подстилающей поверхности телевизионным координатором, при этом измеряются углы визирования, используемые для формирования автоматического управления летательным аппаратом. 2 ил.
СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ, содержащая последовательно соединенные инерционную навигационную систему, систему распознавания и отслеживания образа, бортовую цифровую вычислительную машину, корреляционно-экстремальную навигационную систему, один выход которой подключен к входу бортовой цифровой вычислительной машины, а другой подключен к одному из входов схемы формирования приоритетов, выходы которой подключены к входам системы распознавания и отслеживания образа, один из выходов которой подключен к входу схемы формирования приоритетов, другие входы которой соединены с выходами задатчика траектории, отличающаяся тем, что, с целью повышения автономности, точности, помехозащищенности и надежности системы автоматической посадки летательных аппаратов, в нее введены телевизионный координатор с корреляционной обработкой информации с угломерным блоком и импульсный лазерный дальномер, установленные на подвижной платформе с сервоприводом, а также видеоконтрольное устройство, устройство ручного управления и переключатель режимов работ, причем выход импульсного лазерного дальномера и выходы угломерного блока через первую группу замыкающих контактов переключателя режима работы подключены к соответствующим входам бортовой цифровой вычислительной машины, выходы задатчика траектории через первую группу размыкающих контактов переключателя режима работ подключены к входам системы распознавания и отслеживания образов и входам сервопривода подвижной платформы, дополнительно соединенным через вторую группу замыкающих контактов переключателя режима работы с выходами устройства ручного управления, при этом выходы системы распознавания и отслеживания образов подключены к входам бортовой цифровой вычислительной машины через вторую группу размыкающих контактов переключателя режимов работы, ведеовыход телевизионного координатора с корреляционной обработкой подключен к входу видеоконтрольного устройства, а следующий выход телевизионного коррдинатора с корреляционной обработкой соединен с входами сервопривода подвижной платформы.
| Патент США N 4385354, кл.364-429, 1983. |
