Изобретение относится к машиностроению и может быть использовано в роторных механизмах на магнитных опорах.
Целью изобретения является повышение надежности механизма с магнитным подвесом ротора при переключении одного из каналов, вышедшего из строя, на резервный и при выбеге ротора на страховочных подшипниках.
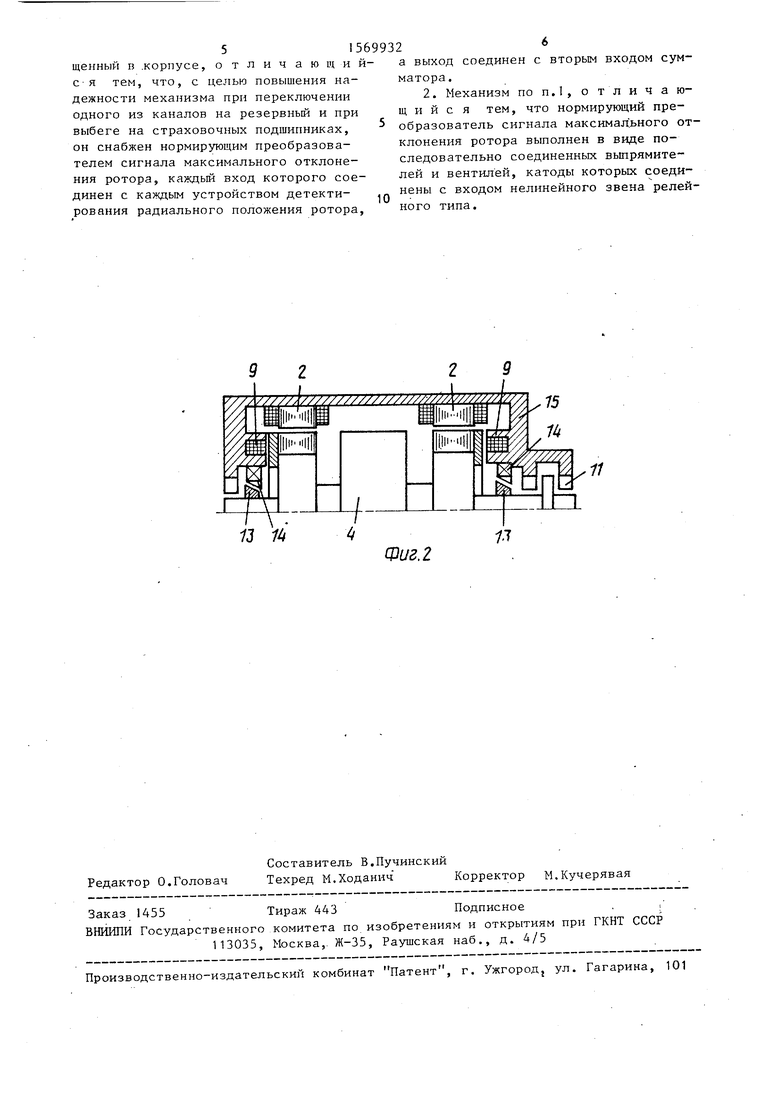
На фиг.1 изображена блок-схема пятиканального магнитного подвеса; на фиг.2 - механизм с магнитными подшипниками, продольный разрез.
Механизм с магнитным подвесом ротора содержит четыре канала 1 управления, с двумя радиальными магнитными подшипниками 2, причем каждый канал 1 содержит устройство 3 детекти- рования радиального положения ротора 4, регулятор 5 тока и два электромагнита 6. Кроме этого, механизм содержит один канал 7 управления с осевым магнитным подшипником 8, содержащим два электромагнита 9, сумматор 10, вход которого связан с устройством I1 детектирования осевого положения ротора, а выход - с регулятором 12 тока. Механизм с магнитным подвесом ротора содержит два страховочных подшипниковых узла, каждый из которых содержит кольцо 13 с наружной конусной поверхностью, размещенное на роторе 4, шарикоподшипник 14 с внут- ренней конусной поверхностью, закрепленный в корпусе 15, а также нормирующий преобразователь 16 сигнала максимального отклонения, входами которого являются входы выпрямителей 17, соединенные с устройствами 3 детектирования, а выход - с анодами вентилей 18, катоды которых соединены с входом нелинейного звена 19, выход которого связан с вторым входом сумматора 10.
Механизм с магнитным подвесом ротора работает следующим образом.
Регуляторы 5 и 12 тока по сигналам устройств 3 и 11 детектирования положения ротора 4 регулируют токи в электромагнитах 6 и 9, тем самым удерживая ротор 4 в центральном положении, сохраняя равномерный страховочный зазор между конусными поверхностями . кольца 13 и шарикоподшипника 14, закрепленного в корпусе 15. При выходе из строя одного из регуляторов 5 и 12 тока или их связей ротор 4 теряет свою стабилизацию по одной из осей и
Q 5
0
5
выходит из центрального положения. При этом нормирующий преобразователь 16, имея на своих входах сигналы перемещения ротора по каждой радиальной оси стабилизации, избирает максимальный сигнал и абсолютное его значение подает на второй вход сумматора 10, где он суммируется с сигналом устройства И детектирования, что ; приводит к осевому перемещению ротора и к его центрированию в радиальном направлении конусными поверхностями колец 13 и шарикоподшипников 14.
В качестве нормирующего преобразователя 16 сигналов максимального отклонения использован преобразователь, входы которого являются входами выпрямителей 17, выходы которых соединены с анодами вентилей 18 (включенных по логической схеме ИЛИ), катоды которых соединены с входом нелинейного звена 19 с зоной нечувствительности в области вибрационных п - ремещенлй ротора 4 и которого является выходом этого преобразователя .
По сравнению с базовым образцом, в качестве которого принят устройство-прототип, использование предлагаемого технического решения позволяет увеличить надежность механизма с магнитным подвесом ротора при переключении одного из вышедшего из строя канала на канал резервный и при выбеге ротора на страховочных подшипниках.
Формула изобретения
1 о Механизм с магнитным подвесом ротора, содержащий по меньшей мере два канала управления радиальным магнитным подшипником, каждый из которых содержит устройство детектирования радиального положения ротора, регулятор тока, по меньшей мере два электромагнита, один канал управления осевым магнитным подшипником по меньшей мере с одним электромагнитом, сумматор, вход которого связан с устройством детектирования осевого положения ротора, а выход - с регулятором тока, два страховочных узла, по меньшей мере один из которых выполнен в виде кольца с наружной конусной поверхностью, размещенного на роторе, механический подшипник с внутренней конусной поверхностью, разме5
щенныи в корпусе, о т л и ч а ю in и и- с я тем, что, с полью повышения надежности механизма при переключении одного из каналов на резервный и при выбеге на страховочных подшипниках, он снабжен нормирующим преобразователем сигнала максимального отклонения ротора, каждый нход которого соединен с каждым устройством детектирования радиального положения ротора,
1569
99326
а выход соединен с вторым входом сумматора .
2. Механизм по п.1, о тличаю- щ и и с я тем, что нормирующий пре- 5 обрачователь сигнала максимального отклонения ротора выполнен в виде последовательно соединенных выпрямителей и вентилей, катоды которых соединены с входом нелинейного звена релейного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2215357C2 |
| ПОДШИПНИК СИСТЕМЫ ЭНЕРГОНЕЗАВИСИМОГО АКТИВНОГО МАГНИТНОГО ПОДВЕСА РОТОРА | 2003 |
|
RU2246644C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ОСЕВЫМ ЭЛЕКТРОМАГНИТНЫМ ПОДШИПНИКОМ РОТОРА С АДАПТАЦИЕЙ К ИЗМЕНЕНИЮ СТАТИЧЕСКОЙ СИЛЫ | 2021 |
|
RU2777512C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2015 |
|
RU2589718C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2011 |
|
RU2460909C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМ ПОДВЕСОМ РОТОРА | 2014 |
|
RU2566671C1 |
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| УПРАВЛЯЕМЫЙ МАГНИТНЫЙ ПОДШИПНИК НА ПОСТОЯННЫХ МАГНИТАХ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2563884C2 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2290746C1 |
| УЧЕБНЫЙ СТЕНД СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМАГНИТНЫМИ ПОДШИПНИКАМИ ВАЛА РОТОРА ЦЕНТРОБЕЖНОГО НАГНЕТАТЕЛЯ ГАЗОПЕРЕКАЧИВАЮЩЕГО АГРЕГАТА | 2021 |
|
RU2780551C1 |
Изобретение относится к машиностроению, в частности к механизмам с магнитным подвесом ротора, и может быть использовано в роторных механизмах на магнитных опорах. Цель изобретения - повышение надежности механизма при переключении одного из каналов на резервный и при выбеге на страховочных подшипниках. Нормирующий преобразователь 16, имея на своих входах сигналы перемещения ротора по каждой радиальной оси стабилизации, избирает максимальный сигнал и абсолютное его значение подает на второй вход сумматора 10. Здесь сигнал суммируется с сигналом устройства детектирования 11, что приводит к осевому перемещению ротора и к его центрированию в радиальном направлении конусными поверхностями колец и шарикоподшипников. 1 з.п. ф-лы, 2 ил.
13 114
Фиг. 2
| Подшипниковый узел магнитной опоры | 1986 |
|
SU1411526A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
