Изобретение относится к области техники вооружения, в частности, к области управляемых ракет класса "земля-земля".
Известны способы построения траектории управляемого снаряда, заключающиеся в том, что снаряд запускается из пусковой установки под углом θ0 к горизонту по баллистической траектории, а затем, после прохождения через вершину траектории, при заданном угле тангажа снаряд переводится на траекторию планирования [1, 2].
Эти способы имеют тот недостаток, что для организации траектории используется лишь часть располагаемой перегрузки, причем перегрузка используется только на нисходящей ветви траектории. Вследствие этого большая часть управляемой траектории проходит в плотных слоях атмосферы, что приводит к излишним потерям энергии снаряда на преодоление аэродинамического сопротивления.
Кроме того, угол подхода снаряда к цели определяется углом планирования и поэтому не может меняться в широких пределах.
Наиболее близким к предлагаемому является способ наведения самонаводящегося снаряда на цель, при котором снаряд с баллистической траектории, за которой следует отлогая траектория, переходит на траекторию концевой фазы, характерную тем, что за счет задержки момента времени начала самонаведения получают увеличенный угол наклона траектории при подходе к цели [3].
Однако и в этом способе угол подхода снаряда к цели ограничен и определяется характеристиками головки самонаведения, и, кроме того, сохраняются недостатки предыдущих способов, связанные с нерациональным использованием располагаемой перегрузки снаряда.
Предлагаемым изобретением решается задача обеспечения максимальной дальности полета управляемой ракеты и вывода ее на цель с заданным углом за счет оптимальной организации ее траектории путем использования для маневра располагаемой перегрузки ракеты.
Технический результат достигается за счет того, что в способе наведения ракеты, включающем запуск на баллистическую траекторию и управление, переводящее ракету в планирующий полет по пологой траектории с последующим выводом на цель, после запуска на баллистическую траекторию при достижении заданной высоты ракетой управляют так, чтобы направление ее полета составило угол 30-50o к горизонту, после чего прекращают управление до достижения ракетой максимальной высоты, затем вновь управляют ракетой, выводя ее на горизонтальный полет, обеспечивая его до момента, пока располагаемая перегрузка ракеты не станет меньше единицы, и, далее, поддерживают пологое планирование до вывода ракеты в район цели, после чего переводят ее в режим пикирования на цель с заданным углом подхода.
На чертеже показана траектория ракеты с предлагаемым способом реализации. Там же представлена траектория баллистического полета на максимальную дальность и полета по траектории с участком планирования, организованным в соответствии со способом прототипа.
Техническая сущность изобретения заключается в том, что в способе наведения (построения траектории управляемой ракеты), включающем запуск, полет по баллистической траектории, пологое планирование и участок наведения на цель, ракету на участке 1 с помощью стартового двигателя запускают под углом 30-90o к горизонту по баллистической траектории до заданной высоты, затем на участке 2, управляя направлением вектора скорости ракеты, разворачивают его на угол 30-50o к горизонту, на участке 3 ракету переводят в баллистический полет до вершины траектории, после чего на участке 4 управляют направлением вектора скорости, замедляя его разворот вниз под действием силы тяжести и переводя его в горизонтальное положение, а затем на участке 5, когда располагаемая перегрузка ракеты становится меньше единицы, управлением поддерживают минимальный наклон вектора скорости к горизонту до конечного участка 6, на котором ракету переводят в пикирование на цель с заданным углом подхода.
Предлагаемый способ отличается тем, что на участке 1 ракета за счет старта, близкого к вертикальному, выводится в разряженные слои атмосферы, где она имеет меньшее лобовое сопротивление. На участке 2 за счет команды, формируемой наземной или бортовой системой управления, реализуется максимальная располагаемая перегрузка, которая разворачивает вектор скорости ракеты вниз. Команда действует, пока вектор скорости ракеты не развернется до угла 30-50o к горизонту. Этот маневр позволяет получить большую горизонтальную составляющую вектора скорости по сравнению с чисто баллистическим полетом. После этого, на участке 3, ракета переходит в баллистический полет.
Начиная с вершины траектории, на участке 4, полет происходит под действием команды планирования, которая формируется по следующему алгоритму.
Команда направлена вверх и равна максимальной К=Кmax до тех пор, пока вектор скорости ракеты направлен вниз (θ<0). Под действием этой команды ракета переходит в горизонтальный полет на максимальной высоте. Полет по горизонтальной траектории осуществляется до тех пор, пока из-за снижения скорости располагаемая перегрузка не станет меньше единицы, после чего, на участке 5, реализуется пологое планирование под углом θ, определяемым соотношением
cos(θ) = nрасп,
где θ - угол вектора скорости ракеты, nрасп - располагаемая перегрузка. На последнем участке, участке 6, за счет снижения величины управляющей команды или командой, направленной вниз, ракета переводится в пикирующий полет под заданным углом.
Представленный способ наведения (организации траектории) позволяет более чем в два раза увеличить дальность полета ракеты по сравнению с баллистическим полетом на максимальную дальность и в полтора раза по сравнению с дальностью полета ракеты с одним участком планирования, соответствующей организации траектории прототипа.
Наличие участка 6 позволяет выйти на цель с заданным углом пикирования.
Источники информации
1. Заявка ФРГ (DE) 3738580 по классу МКИ 4 F 41 G 7/22, F 42 В 15/02, опубликована 01 июня 1989 г. - аналог.
2. Патент России 2124688 по классу ПК 6 F 41 G 7/22, опубликована 25 декабря 1997 г. - аналог.
3. Заявка Франции (FR) 2540616 по классу МКИ F 41 G 9/00, F 42 В 13/30, опубликована 10 августа 1984 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ ИНИЦИИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ АРТИЛЛЕРИЙСКОГО СНАРЯДА, БАЛЛИСТИЧЕСКИЙ КОЛПАК И ДИСТАНЦИОННАЯ ТРУБКА УПРАВЛЯЕМОГО АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2000 |
|
RU2192615C2 |
| СПОСОБ УПРАВЛЕНИЯ ПОЛЕТОМ БАЛЛИСТИЧЕСКОГО САМОНАВОДЯЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА "ПОВЕРХНОСТЬ - ПОВЕРХНОСТЬ" | 2002 |
|
RU2216708C1 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
| СПОСОБ ЗАПУСКА УПРАВЛЯЕМОЙ РАКЕТЫ С ОПТИЧЕСКИМ ТЕЛЕНАВЕДЕНИЕМ | 2000 |
|
RU2193154C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2006 |
|
RU2331036C2 |
Изобретение относится к области техники вооружения и может быть использовано при проектировании и модернизации управляемых ракет класса "земля-земля". Технический результат - обеспечение максимальной дальности полета ракеты за счет оптимальной организации ее траектории путем использования для маневра располагаемой перегрузки ракеты. Наведение (траекторию полета) осуществляют на шести участках. На первом участке ракету запускают под углом 30-90o к горизонту на баллистическую траекторию до заданной высоты, на втором участке вектор скорости ракеты разворачивают максимальной располагаемой перегрузкой на угол 30-50o, на третьем участке ракету переводят в баллистический полет до вершины траектории, на четвертом участке сообщают ракете максимальную располагаемую перегрузку, направленную вверх, до тех пор, пока ее вектор скорости не станет горизонтальным, на пятом участке осуществляют горизонтальный полет, переходящий в пологое планирование. На шестом участке ракету переводят в пикирование с заданным углом к горизонту. 1 ил.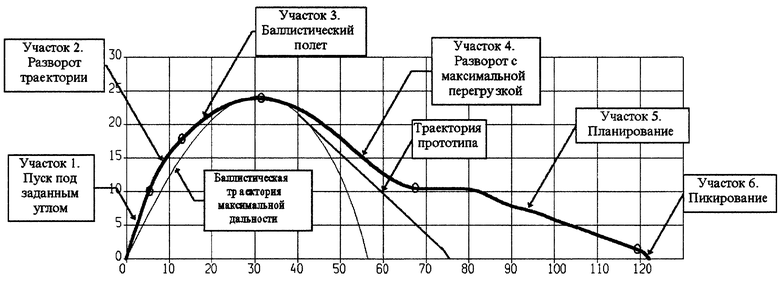
Способ наведения ракеты, включающий запуск на баллистическую траекторию и управление, переводящее ракету в планирующий полет по пологой траектории с последующим выводом на цель, отличающийся тем, что после запуска на баллистическую траекторию при достижении заданной высоты ракетой управляют так, чтобы направление ее полета составило угол 30-50o к горизонту, после чего прекращают управление до достижения ракетой максимальной высоты, затем вновь управляют ракетой, выводя ее на горизонтальный полет, обеспечивая его до момента, пока располагаемая перегрузка ракеты не станет меньше единицы, и далее поддерживают пологое планирование до вывода ракеты в район цели, после чего переводят ее в режим пикирования на цель с заданным углом подхода.
| СПОСОБ ОБЕЗЗАРАЖИВАНИЯ ВОДНЫХ СИСТЕМ МИНЕРАЛИЗОВАННЫМИ ПРОМЫШЛЕННЫМИ ВОДАМИ В ВИДЕ РАСТВОРОВ ГИПОХЛОРИТА | 2013 |
|
RU2540616C2 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| US 3693909, 26.09.1972 | |||
| GB 1116801, 12.06.1968. | |||

