Изобретение относится к радиолокации, а именно к области радиотехнических измерений статистических характеристик морских волн (МВ) для обеспечения безопасности посадки летательного аппарата (ЛА) на воду, повышения достоверности прогнозов погоды, выбора оптимальных путей плавания судов, в океанографических исследованиях и др.
Известен способ измерения высоты МВ с ЛА (а. с. СССР N 169808,М. Кл. 2 42С 26/01, G 01 C, бюл. N 7, 1965, с. 109) путем облучения морской поверхности высокочастотной энергией и приема отраженных от нее сигналов, при котором измеряется отношение когерентной (средней) и некогерентной (флюктуирующей) составляющих отраженного сигнала Uк/Uн = f(H/ λ ), где H - высота МВ, а λ - длина излучаемой радиоволны.
В качестве устройства, реализующего этот способ, используют обычный импульсный радиолокатор (РЛ) коротковолнового (КВ) диапазона частот с широкой диаграммой направленности антенны (ДНА), ось которой перпендикулярна к морской поверхности. Импульсный РЛ обычно содержит соединенные последовательно генератор тактовых импульсов, генератор запускающих импульсов, передатчик, антенный переключатель и антенну, причем второй выход антенного переключателя соединен с входом усилителя высокой частоты (УВЧ), стробируемый вход которого соединен с выходом генератора тактовых импульсов через соединенные последовательно генератор задержанных импульсов и генератор импульсов строба, а выход УВЧ соединен с его управляющим входом через соединенные последовательно амплитудный детектор, видеоусилитель, пиковый детектор, фильтр нижних частот (ФНЧ) и блок автоматической регулировки усиления (АРУ), а также функциональный преобразователь, соединенный с выходом пикового детектора.
Огибающая эхо-сигналов на выходе пикового детектора содержит информацию о высоте волн и других параметрах морского волнения, например длине, уклонах и направлении распространения МВ.
Недостаток этого способа состоит в зависимости точности измерения высоты МВ от высоты полета, углов крена и тангажа ЛА, а также высоты МВ.
Известно устройство для измерения высоты МВ, (Гарнакерьян А.А. и др. К вопросу об измерении высоты морских волн радиолокационным методом. Неконтактные методы измерения океанографических параметров. - М.:Гидрометеоиздат, 1975, с. 59-66, рис. 2, с. 64). В этом устройстве, как и в предыдущем, используется импульсный радиолокатор КВ диапазона частот с широкой ДНА, направленной перпендикулярно к морской поверхности, в котором выход приемника соединен с его входом через последовательно соединенные пиковый детектор и блок АРУ, кроме того,выход приемника подключен к соединенным последовательно центрирующему фильтру, квадратору, фильтру нижних частот и индикатору высоты волн.
Подобное устройство и результаты его использования также описаны (Гарнакерьян А. А. , Сосунов А.С. Радиолокация морской поверхности. - Ростов-на-Дону, изд-во Ростовского университета, 1978,с.103-108).
Недостаток этого устройства состоит в том, что точность измерения высоты МВ зависит от высоты полета, изменений углов крена и тангажа ЛА, а также от высоты МВ.
Наиболее близким по своей технической сущности к заявляемому устройству является "Устройство для измерения параметров морского волнения" (а. с. СССР N 632969, М. Кл. 2 G 01 S 9/90, H 03 G 3/20, бюл. N 42, 1978). Это устройство содержит соединенные последовательно генератор тактовых импульсов, генератор запускающих импульсов, передатчик, антенный переключатель и антенну, подключенные последовательно к выходу генератора тактовых импульсов генератор импульсов временной задержки, генератор импульсов строба и УВЧ, соединенный сигнальным входом с вторым выходом антенного переключателя, соединенные последовательно амплитудный детектор, видеоусилитель и пиковый детектор, выход которого соединен с управляющим входом УВЧ через перемножитель, соединенный вторым входом с датчиком скорости ЛА, квадратор, фильтр нижних частот (ФНЧ) и блок АРУ. К выходу пикового детектора также подключены соединенные последовательно фильтр верхних частот (ФВЧ), квадратор, второй ФНЧ и индикатор.
Конфигурация канала АРУ в устройстве позволяет получать на входе индикатора напряжение, характеризующее уклоны МВ. Уклоны в основном зависят от высоты МВ и скорости ветра. Таким образом, с помощью устройства можно измерять высоту волн, однако напряжение на индикаторе будет пропорционально квадрату коэффициента вариации, т.е. квадрату высоты волн.
Недостаток прототипа состоит в снижении точности измерения высоты морских волн с ростом высоты полета, углов крена и тангажа ЛА, с ростом высоты МВ, а также в неудобстве измерения высоты МВ по индикатору с квадратичной шкалой.
Целью изобретения является повышение точности измерения высоты морских волн путем автоматического управления мощностью передатчика средним уровнем отраженного сигнала и компенсации при этом влияния текущих изменений высоты полета, углов крена и тангажа и степени волнения (шероховатости отражающей поверхности) на средний уровень отраженного сигнала.
Цель достигается тем, что в устройство для измерения высоты морских волн с летательного аппарата, содержащее соединенные последовательно генератор тактовых импульсов, генератор запускающих импульсов, передатчик, антенный переключатель и антенну, приемник с системой автоматической регулировки его усиления, введены подключенные последовательно к выходу генератора тактовых импульсов генератор импульсов временной задержки и генератор импульсов строба, первый и второй усилители высокой частоты, сигнальные входы которых соединены с выходом принимаемого сигнала антенного переключателя, стробируемые входы соединены с выходом генератора импульсов строба, выход первого усилителя высокой частоты соединен с входом управления мощностью передатчика через соединенные последовательно первые амплитудный детектор, пиковый детектор и фильтр низких частот, выход второго усилителя высокой частоты соединен с его управляющим входом через соединенные последовательно второй амплитудный детектор, видеоусилитель, второй пиковый детектор, второй фильтр нижних частот и блок автоматической регулировки усиления, к выходу второго пикового детектора также подключены соединенные последовательно фильтр верхних частот, квадратор, третий фильтр низких частот, блок извлечения квадратного корня и индикатор высоты морских волн.
Для сопоставительного анализа рассмотрим особенности работы заявляемого устройства и его прототипа.
В обоих устройствах реализуется метод измерения, основанный на зависимости энергетических характеристик отраженного от морской поверхности сигнала от высоты МВ (степени неровности отражающей поверхности). Метод предполагает измерение отношения средней (когерентной) Pк и флюктуационной (некогерентной) Pн составляющих мощности отраженного сигнала. В общем случае Pк и Pн на выходе приемной антенны определяются из выражений [1, с. 34, 42]: ,
,
где Pa - мощность сигнала, излучаемого антенной;
G0 - коэффициент усиления антенны;
λ - длина волны излучаемого сигнала; - комплексный коэффициент отражения;
- комплексный коэффициент отражения;
βo - угол отклонения оси (ДНА) от вертикали (углы крена и тангажа);
H - высота полета ЛА;
k = 2π/λ; ;
σh = 0,22H3% - среднее квадратичное отклонение ординат морских волн;
θA - ширина ДНА; - комплексная диэлектрическая проницаемость морской воды;
- комплексная диэлектрическая проницаемость морской воды;
H3% - высота морских волн 3%-ной обеспеченности по шкале ГУГМС, принятой в РФ с 1953 г.
Отношение Pн/Pк определяется из выражения
Измерение отношения Pн/Pк на высокой частоте технически сложно. Известна аналитическая зависимость между коэффициентом вариации огибающей Kв случайного процесса и отношением Pн/Pк [1, с. 103]: ,
,
где σc - среднее квадратичное отклонение флуктуаций огибающей отраженного сигнала;
mс - среднее значение (математическое ожидание) огибающей;
I0(x) и I1(x) - функции Бесселя первого рода нулевого и первого порядка от мнимого аргумента.
В обоих устройствах осуществляется измерение коэффициента вариации Кв огибающей отраженного сигнала. Любому значению Кв соответствует определенная величина отношения Рн/Рк, а значит, и определенная высота морских волн Н3% отражающей поверхности. Аналитическая зависимость Кв = f(Н3%) может быть получена путем подстановки выражения (3) в формулу (4). Из-за громоздкости выражения оно не приводится. Графическая зависимость, рассчитанная по этому выражению, приведена в [1, с. 106]. Анализ графика показывает, что в диапазоне значений Кв = 0 oC 0,4 зависимость практически линейная. Это позволяет измерять высоту морских волн H3% путем измерения коэффициента вариации огибающей отраженного от морской поверхности сигнала с линейным коэффициентом пропорциональности.
Коэффициент вариации огибающей измеряется в обоих устройствах как отношение среднего квадратичного отклонения флуктуаций огибающей σc к среднему значению mс. Операция деления в устройстве выполняется с помощью канала АРУ. С этой целью напряжение огибающей с выхода пикового детектора подается на вход ФНЧ. Частота среза ФНЧ выбирается на границе между нижней информационной частотой спектра огибающей отраженного сигнала и верхней частотой флуктуаций огибающей, обусловленных внешними воздействующими факторами, такими как высота полета, углы крена и тангажа ЛА. На выходе ФНЧ выделяется напряжение, пропорциональное среднему значению огибающей mc. Напряжение mc подается в блок АРУ, сравнивается в нем с опорным напряжением, разница усиливается и в качестве управляющего сигнала поступает на управляющий вход усилителя высокой частоты (УВЧ). Путем управления коэффициентом усиления УВЧ с помощью канала АРУ напряжение mc на выходе пикового детектора стабилизируется. Все изменения mc исходного сигнала в обратно пропорциональной зависимости прикладываются к амплитуде флуктуаций огибающей эхо-сигнала. При этом единственно среднее квадратичное отклонение преобразованной огибающей σпр несет информацию о высоте волн H3%
Kв= σпр= Kпрσc= σc/mc. (5)
Таким образом, точность измерения высоты морских волн зависит от точности выполнения операции деленияKв= σc/mc или, другими словами, от качества выполнения преобразования огибающей с коэффициентом Кпр = 1/mс. Реализовать с высокой точностью эту операцию затруднительно, так как диапазон изменения уровня эхо-сигналов под влиянием текущих изменений высоты полета, углов крена и тангажа ЛА, степени взволнованности морской поверхности и диэлектрической проницаемости воды превосходит линейный участок амплитудной характеристики УВЧ.
Определим возможный диапазон изменений уровня эхо-сигналов. Используя выражения (3.74) и (3.77) (Б.Р. Левин. - Теоретические основы статистической радиотехники. - Кн. 1-я, 2-е изд. - М.: Советское радио, 1974,с.96), легко показать, что mс ≈  при Pк > Pн, что имеет место в КВ диапазоне при длинах радиоволн λ = 10 м и в диапазоне измеряемых высот волн H3% = 0,2 - 3 м. Диапазон изменения среднего уровня мощности Pк отраженного сигнала на выходе УВЧ определим из выражения (1). Для этого зададим крайние вероятные ситуации режимов полета, состояния морской поверхности, а также значения постоянных величин, характеризующих радиолокатор: Pа = 40 Вт; G0 = 2;
при Pк > Pн, что имеет место в КВ диапазоне при длинах радиоволн λ = 10 м и в диапазоне измеряемых высот волн H3% = 0,2 - 3 м. Диапазон изменения среднего уровня мощности Pк отраженного сигнала на выходе УВЧ определим из выражения (1). Для этого зададим крайние вероятные ситуации режимов полета, состояния морской поверхности, а также значения постоянных величин, характеризующих радиолокатор: Pа = 40 Вт; G0 = 2;  = 0,6; λ = 10 м; H = 400 - 6000 м; Кв = 0,044 - 0,6; θA = 0 - 40o. Подставляя заданные значения в выражение (1) и производя вычисления, получим, что с ростом высоты полета, углов крена, высоты волн от наименьших до наибольших значений Pк ослабляется в 3076 раз или на 34 дБ.
= 0,6; λ = 10 м; H = 400 - 6000 м; Кв = 0,044 - 0,6; θA = 0 - 40o. Подставляя заданные значения в выражение (1) и производя вычисления, получим, что с ростом высоты полета, углов крена, высоты волн от наименьших до наибольших значений Pк ослабляется в 3076 раз или на 34 дБ.
Реальные значения углов крена при выполнении разворотов и при полете ЛА по кругу достигают значений 40o. При этом уровень отраженного сигнала изменяется в 24 раза или на 14 дБ по мощности. Изменения уровня значительные и приводят к ошибкам выполнения операции деления KB= σc/mc .
В прототипе для определения средней мощности эхо-сигнала на входе УВЧ используется упрощенная формула для исключительно вертикального зондирования поверхности [1], с. 35]:
Формула (6) отличается от формулы (1) тем, что угол βo отклонения оси ДНА от вертикали, т. е. углы крена и тангажа ЛА, в этой формуле и в устройстве-прототипе не учитываются.
В отличие от прототипа в заявляемом устройстве реализуется полная формула (1). Это обеспечивается введением канала автоматического управления мощностью передатчика, на выходе ФНЧ которого выделяется напряжение инфранизких частот, вызванное изменением углов крена и тангажа, а также высоты ЛА.
Управление мощностью передатчика при этом осуществляется с помощью отрицательной обратной связи по уровню возмущения. Если, например, растет высота полета ЛА или увеличивается угол βo, то мощность эхо-сигнала на входе УВЧ уменьшается. При этом в дополнительном канале формируется управляющий сигнал, который увеличивает мощность передатчика. В результате этого уровень эхо-сигнала на входе УВЧ стабилизируется.
В прототипе компенсация влияния изменений высоты полета, крена и тангажа ЛА и других факторов не осуществляется, что приводит к перегрузке канала АРУ и ошибкам в измерении высоты МВ.
Очевидно, что в заявляемом устройстве схема АРУ, выполняющая операцию деления,будет работать на линейном участке амплитудной характеристики второго УВЧ, обеспечивая точное измерение высоты МВ.
Из изложенного следует, что введение в заявляемое устройство нового канала управления мощностью передатчика для повышения точности измерения высоты МВ для специалиста не следует в явном виде из уровня техники, а заявляемое устройство является новым, имеет изобретательский уровень и является патентоспособным.
Заявляемое устройство может быть реализовано на предприятиях авиационной и радиотехнической промышленности с использованием типовых радиотехнических блоков, что свидетельствует о его промышленной применимости.
Структурная схема заявляемого устройства представлена на чертеже и состоит из следующих блоков: 1 - генератор тактовых импульсов; 2 - генератор запускающих импульсов; 3 - передатчик; 4 -антенный переключатель; 5 - антенна; 6 - генератор импульсов временной задержки; 7 - генератор импульсов строба; 8 и 12 - первый и второй усилители высокой частоты (УВЧ); 9 и 13 - первый и второй амплитудные детекторы; 10 и 15 - первый и второй пиковые детекторы; 11, 16 и 20 - первый, второй и третий фильтры нижних частот (ФНЧ); 14 - видеоусилитель; 17 - блок автоматической регулировки усиления (АРУ); 18 - фильтр верхних частот (ФВЧ); 19 - квадратор; 21 - блок излучения квадратного корня; 22 - индикатор высоты морских волн.
Генератор 1 тактовых импульсов через генератор 2 запускающих импульсов соединен с входом передатчика 3, выход которого через антенный переключатель 4 соединен с антенной 6. К выходу генератора 1 тактовых импульсов также подключены соединенные последовательно генератор 6 импульсов временной задержки и генератор 7 импульсов строба. Сигнальный выход антенного переключателя 4 соединен с сигнальными входами первого УВЧ 8 и второго УВЧ 12, стробируемые входы которых соединены с выходом генератора 7 импульсов строба. Выход первого УВЧ 8 через соединенные последовательно первый амплитудный детектор 9, первый пиковый детектор 10 и первый ФНЧ 11 соединен с входом управления мощностью передатчика 3. Выход второго УВЧ 12 соединен с его третьим входом через соединенные последовательно второй амплитудный детектор 13, видеоусилитель 14, второй пиковый детектор 15, второй ФНЧ 16 и блок 17 АРУ. К выходу второго пикового детектора 15 также подключены соединенные последовательно ФВЧ 18, квадратор 19, третий ФНЧ 20, извлекатель квадратного корня 21 и индикатор 22 высоты морских волн.
Устройство работает следующим образом.
Генератор 1 вырабатывает последовательность тактовых импульсов со стабильным периодом повторения, которыми синхронизируется генератор 2 запускающих импульсов. Генератор 2 формирует короткие, порядка одной микросекунды импульсы запуска передатчика 3. Передатчик 3 формирует мощные радиоимпульсы, поступающие через антенный переключатель 4 в антенну 5, которая излучает их в направлении морской поверхности. При этом второй выход - выход эхо-сигнала антенного переключателя 4, подключенный к сигнальным входам первого УВЧ 8 и второго УВЧ 12, замыкается мощными радиоимпульсами передатчика 3, а сами УВЧ 8 и 12 закрыты постоянным смещением. Эхо-сигналы от морской поверхности, задержанные относительно зондирующих сигналов передатчика 3 на время, необходимое для их движения до поверхности моря и обратно, принимаются антенной 5 и через антенный переключатель 4 поступают на сигнальные входы первого 8 и второго 12 УВЧ. Оба УВЧ к этому времени открываются импульсами строба, сформированными генератором 6 импульсов временной задержки и генератором 7 строба. Длительность импульсов строба определяется максимальной высотой полета ЛА.
В канале управления мощностью передатчика эхо-сигналы с выхода антенного переключателя 4 усиливаются первым УВЧ 8, преобразуются первым амплитудным детектором 9 в последовательность видеоимпульсов, из которой первым пиковым детектором 10 выделяется их огибающая. Посредством первого ФНЧ 11 огибающая усредняется и поступает в передатчик 3 для управления мощностью излучаемых радиоимпульсов. Полоса пропускания первого ФНЧ 11 выбирается в пределах между верхней частотой возмущений ЛА по крену и тангажу и нижней частотой морских волн. Если возрастает среднее значение огибающей, то уменьшается, например, питающее напряжение передатчика 3, а амплитуда зондирующих радиоимпульсов убывает. При убывании среднего значения огибающей питающее напряжение и амплитуда зондирующих импульсов возрастает. Такая отрицательная обратная связь приводит к компенсации внешнего воздействия, например крена, тангажа или высоты полета ЛА, на уровень огибающей эхо-сигналов. Таким образом, осуществляется стабилизация среднего значения огибающей на входе канала измерения высоты МВ.
Одновременно в канале АРУ усиленные вторым УВЧ 12 эхо-сигналы преобразуются вторым амплитудным детектором 13 в последовательность видеоимпульсов, которые усиливаются видеоусилителем 14. Посредством второго пикового детектора 15 из последовательности видеоимпульсов выделяется их огибающая, которая усредняется вторым ФНЧ 16 и поступает в блок АРУ 17. В блоке АРУ 17 усредненное значение огибающей сравнивается с опорным напряжением, их разность усиливается и поступает в качестве управляющего напряжения на третий вход второго УВЧ 12. При этом стабилизируется среднее значение огибающей на выходе второго пикового детектора 15. Огибающая на выходе второго пикового детектора 15 представляет собой непрерывный случайный процесс со средним уровнем, отличным от нуля и флуктуирующий относительно этого среднего уровня. Среднеквадратичное значение флуктуаций пропорционально коэффициенту вариации огибающей, который свою очередь связан линейной зависимостью с высотой измеряемых морских волн. Информационный спектр огибающей сосредоточен в диапазоне частот от 0,5 до 20 Гц.
В канале измерения высоты МВ напряжение огибающей поступает на вход ФВЧ 18, в котором частоты ниже 0,5 Гц задерживаются, а частоты выше 0,5 Гц проходят с фиксированным коэффициентом передачи. В ФВЧ напряжение огибающей центрируется, т. е. удаляется постоянная составляющая. Затем центрированная огибающая возводится в квадрат блоком квадратора 19, усредняется третьим ФНЧ 20, на выходе которого получается постоянное напряжение, пропорциональное дисперсии случайных флуктуаций огибающей, соответствующее квадрату коэффициента огибающей. Извлекая из этого напряжения квадратный корень, на выходе блока извлечения корня 21 получают напряжение, пропорциональное коэффициенту вариации огибающей, и соответственно высоте МВ, которая отображается на индикаторе высоты МВ с линейной шкалой.
Предлагаемое устройство может быть использовано в морской авиации для обеспечения безопасной посадки гидросамолетов, для прогнозирования условий навигации морских и воздушных судов, при комплексных исследованиях океана.
Таким образом, устройство удовлетворяет критериям патентоспособности, т. е. является новым, имеет изобретательский уровень и промышленное применение и, следовательно, может быть защищено патентом.
Использование: радиолокация для обеспечения безопасности посадки гидросамолета. Сущность изобретения: устройство содержит генератор тактовых импульсов, генератор запускающих импульсов, передатчик, антенный переключатель и антенну, приемник с системой автоматической регулировки усиления, генератор импульсов временной задержки, генератор импульсов строба, два усилителя высокой частоты, два амплитудных детектора, два пиковых детектора, три фильтра нижних частот, блок автоматической регулировки усиления, блок извлечения квадратного корня и индикатор высоты морских волн. Повышение точности измерения морских волн достигается за счет стабилизации среднего уровня эхо-сигнала на входе УВЧ путем компенсации возмущающих воздействий от изменений параметров полета летательного аппарата и высоты морских волн. 1 ил.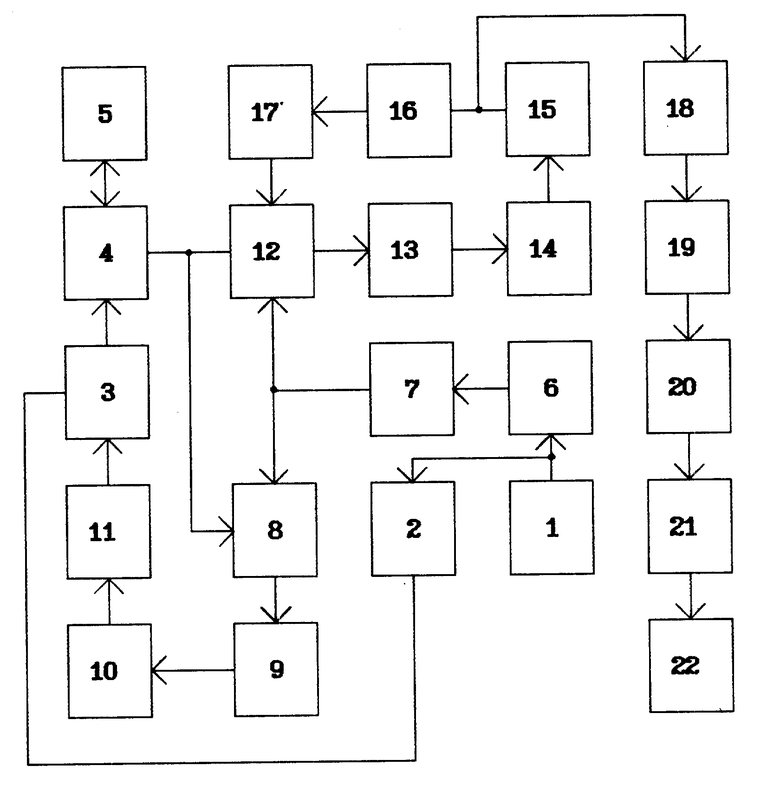
Устройство для измерения высоты морских волн с летательного аппарата, содержащее соединенные последовательно генератор тактовых импульсов, генератор запускающих импульсов, передатчик, антенный переключатель и антенну, приемник с системой автоматической регулировки его усиления, отличающееся тем, что в него введены подключенные последовательно к выходу генератора тактовых импульсов генератор импульсов временной задержки и генератор импульсов строба, первый и второй усилители высокой частоты, сигнальные входы которых соединены с выходом принимаемого сигнала антенного переключателя, стробируемые входы соединены с выходом генератора импульсов строба, выход первого усилителя высокой частоты соединен с входом управления мощностью передатчика через соединенные последовательно первые амплитудный детектор, пиковый детектор и фильтр нижних частот, выход второго усилителя высокой частоты соединен с его управляющим входом через соединенные последовательно второй амплитудный детектор, видеоусилитель, второй пиковый детектор, второй фильтр нижних частот и блок автоматической регулировки усиления, к выходу второго пикового детектора также подключены соединенные последовательно фильтр верхних частот, квадратор, третий фильтр нижних частот, блок извлечения квадратного корня и индикатор высоты морских волн.
| Гарнакерьян А.А., Сосунов А.С | |||
| Радиолокация морской поверхности | |||
| - Ростов-на-Дону, Ростовский университет, 1978, с | |||
| Клапанный регулятор для паровозов | 1919 |
|
SU103A1 |
| SU, авторское свидетельство, 632969, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
