Изобретение относится к автоматизации технологических процессов и может быть использовано при автоматизации процесса холодного копчения рыбной продукции.
Известен способ автоматического управления процессом холодного копчения по А. с. 847973, А 23 В 4/044, 1981, предусматривающий стабилизацию температуры и скорости коптильного дыма, поддержание температуры "мокрого" термометра и поддержание разности температур между поверхностью продукта и "мокрого" термометра в пределах 0,5-4,0oС.
Однако в известном способе не предусмотрено регулирование параметров предварительной подсушки рыбы сушильным агентом, а следовательно, отсутствует оперативная информация об окончании процесса подсушки и начале процесса копчения. Недостатками способа являются нерациональное использование коптильного дыма, значительная длительность процесса холодного копчения и низкое качество готового продукта.
Известен способ автоматического управления процессом холодного копчения (А. с. 1762852 СССР, МКИ5 А 23 В 4/044. Способ автоматического управления процессом холодного копчения рыбы /С.П.Сердобинцев, Н.Ю.Ильцевич (СССР). - 4931178/13; Заявлено 24.04.91; Опубл. 23.09.92. Бюл. 35//Открытия. Изобретения. - 1992. - 35), предусматривающий стабилизацию температуры и скорости коптильного дыма, а также поддержание относительной влажности дымовоздушной смеси с коррекцией по убыли массы рыбы за заданный промежуток времени.
В известном способе регулирование интенсивности испарения путем изменения параметров дымовоздушной смеси по результатам сравнения измеренного значения потери массы продукта с прогнозируемой нельзя признать точным и достаточно надежным.
Наиболее близким по технической сущности и достигаемому результату является способ автоматического управления процессом холодного копчения рыбы, предусматривающий обработку рыбы после подсушки коптильным дымом с его частичной рециркуляцией, измерение влагосодержания, скорости и температуры сушильного агента в процессе обработки, концентрации коптильного дыма на входе в коптильную камеру, соотношение расходов опилок и воздуха в дымогенераторе с последующим регулированием всех параметров. (Б.Н.Миллер Зарубежные механизированные установки для копчения рыбы, серия IX. Продовольственное машиностроение, М., ЦИНТИМаш, 1962, с.17-37).
Однако известный способ не позволяет определить время окончания процесса подсушки по количеству испаряемой из рыбы влаги с отходящим сушильным агентом и момент переключения режима тепловой обработки с процесса подсушки на процесс копчения.
Задачей изобретения является повышение точности и надежности управления процессом холодного копчения рыбы, улучшение качества готовой продукции, снижение удельных энергетических затрат.
Поставленная задача достигается тем, что в способе автоматического управления процессом холодного копчения рыбы, предусматривающем обработку рыбы после подсушки коптильным дымом с его частичной рециркуляцией, измерение влагосодержания, скорости и температуры сушильного агента в процессе обработки, концентрации коптильного дыма на входе в коптильную камеру, соотношение расходов опилок и воздуха в дымогенераторе с последующим регулированием всех параметров, согласно изобретению дополнительно измеряют влагосодержание сушильного агента на выходе из коптильной камеры, концентрацию коптильного дыма на выходе из коптильной камеры, величину разрежения в коптильной камере, по текущим значениям влагосодержания сушильного агента на входе и выходе из коптильной камеры и скорости сушильного агента определяют текущее значение количества испаряемой влаги за время подсушки и при ее достижении заданного значения прекращают подсушку рыбы и начинают процесс копчения, в течение которого стабилизируют разность концентраций коптильного дыма на входе и выходе из коптильной камеры на каждом временном интервале воздействием на величину разрежения в коптильной камере путем изменения мощности привода вытяжного вентилятора.
На чертеже представлена схема, реализующая предлагаемый способ автоматического управления.
Схема содержит камеру копчения 1, дымогенератор 2, калорифер 3, нагнетающий вентилятор 4, вытяжной вентилятор 5; линии: подачи опилок 6 и воздуха 7 в дымогенератор, подачи воздуха в калорифер 8, подачи сушильного агента и коптильного дыма в коптильную камеру 9, отвода из коптильной камеры отработанного сушильного агента и коптильного дыма 10, рециркуляции коптильного дыма 11; датчики: расхода сушильного агента (коптильного дыма) 12, опилок 13, воздуха 14, температуры 15 и разрежения 16 в коптильной камере, влагосодержания сушильного агента 17, 18 концентрации коптильного дыма 19 и 20 на входе и выходе из коптильной камеры; локальные регуляторы 21-25; микропроцессор 26; исполнительные механизмы 27-35 (а, б, в, г, д, е, ж, з, и - входные каналы управления; к, л, м, н, о, п, р с, т - выходные каналы управления).
Способ осуществляется следующим образом.
Исходную рыбную продукцию, предварительно прошедшую технологические операции по размораживанию, сортировке, разделке, вкусовому посолу и промывке, равномерно нанизывают на прутки подвижных рам (тележек), которые помещают в коптильную камеру 1. В коптильной камере 1 последовательно осуществляют сначала подсушку рыбы сушильным агентом, подаваемым по линии 9 вентилятором 4 через калорифер 3, установленный в линии подачи 8, а затем обработку коптильным дымом, полученным в дымогенераторе 2, на вход которого подают опилки по линии 6 и воздух по линии 7.
По вводимой исходной информации о начальной влажности рыбы и плотности ее распределения на прутках и заложенному алгоритму управления микропроцессор 26 вырабатывает задание локальным регуляторам 23 и 24, которые по сигналу отклонения текущих значений температуры в коптильной камере и расхода сушильного агента, измеряемых соответственно датчиками 15 и 12, от заданных посредством исполнительных механизмов 27 и 28 устанавливает требуемый тепловой и массовый поток сушильного агента на подсушку рыбы. По информации датчиков 17, 18 и 12 о разности влагосодержаний сушильного агента на входе и выходе из коптильной камеры и его скорости микропроцессор 26 непрерывно вычисляет количество испарившейся влаги за время τ по формуле
U = (x2-x1)ρсвFντ,
где х1, х2 - соответственно влагосодержание сушильного агента на входе и выходе из коптильной камеры, кг/кг; ρсв - плотность абсолютно сухого воздуха, кг/м3; F - площадь сечения коптильной камеры, м2; v - скорость сушильного агента, м/с, τ - время подсушки, ч;
и при достижении текущего значения этой величины заданного значения прекращает процесс подсушки и начинает собственно процесс холодного копчения. При этом микропроцессор одновременно отключает калорифер 3 посредством исполнительного механизма 28, прекращает подачу сушильного агента по линии 8 и начинает подачу коптильного дыма из дымогенератора по линии 9 благодаря синхронизированной работе исполнительных механизмов 31 и 32.
В процессе копчения рыбы микропроцессор сравнивает текущее значение концентрации коптильного дыма в линии 9, измеряемое датчиком 19, с заданным и по сигналу рассогласования вырабатывает задание локальным регуляторам 21 и 22, которые с помощью исполнительных механизмов 29 и 30 воздействуют на соотношение расходов опилок и воздуха на входе в дымогенератор 2. Режим подачи коптильного дыма на входе в коптильную камеру по линии 9 микропроцессор устанавливает с помощью исполнительного механизма 27 регулируемого привода вентилятора 4, корректируя задание локальному регулятору 23.
Коррекцию текущего значения влагосодержания коптильного дыма на входе в коптильную камеру, измеряемого датчиком 17, микропроцессор осуществляет путем изменения его расхода в линии рециркуляции 11, причем при отклонении текущего значения влагосодержания коптильного дыма от заданного в сторону уменьшения увеличивает расход отработанного коптильного дыма в линии рециркуляции посредством синхронно работающих исполнительных механизмов 33 и 34 (исполнительный механизм 33 открывает заслонку в линии рециркуляции 11, исполнительный механизм 34 регулирует положение заслонки при выбросе отработанного коптильного дыма в атмосферу по линии 10), а при отклонении текущего значения влагосодержания коптильного дыма от заданного в сторону увеличения уменьшает расход отработанного коптильного дыма в линии рециркуляции 11 (исполнительный механизм 33 закрывает заслонку в линии рециркуляции 11, исполнительный механизм 34 регулирует положение заслонки при выбросе отработанного коптильного дыма в атмосферу по линии 10).
По ходу процесса копчения на каждом его временном интервале микропроцессор осуществляет стабилизацию разности концентраций коптильного дыма на входе и выходе из коптильной камеры, измеряемой датчиками 19 и 20, устанавливая задание локальному регулятору 25, который в свою очередь воздействует на величину разрежения в коптильной камере, измеряемой датчиком 16, путем изменения мощности регулируемого привода вытяжного вентилятора 5 посредством исполнительного механизма 35.
В качестве конкретного примера по реализации способа рассматривается технология получения рыбы холодного копчения на предприятии "Восток" (холодильник Воронежского облпотребсоюза) в установке туннельного типа для производства провесных и вяленых рыботоваров производительностью по исходной рыбе от 700 до 3500 кг/сутки. Пределы регулирования основных технологических параметров процессов подсушки и копчения обоснованы в результате экспериментальных исследований и широко представлены в литературе [1, 2, 3].
В качестве объекта холодного копчения использовалась скумбрия с начальной влажностью 76,5 %. Номинальная производительность установки по исходной скумбрии, предварительно прошедшей технологические операции по размораживанию, сортировке, посолу, отмочке, составляет 1000 кг/сутки. Рыба в неразделанном виде массой 0,6-0,7 кг нанизывалась на стальные прутки с шагом 50 мм, размещалась на рамках и направлялась в коптильную камеру.
В соответствии с технологическим регламентом микропроцессор 26 устанавливал задание локальным регуляторам 21-25 на режим подсушки и собственно копчения.
Подсушку рыбы проводили при скорости движения воздуха (3±0,1) м/с, его температуре (300±0,5) К и относительной влажности (50±1)%.
По текущей информации датчиков 17, 18 и 12 о разности влагосодержаний сушильного агента на входе и выходе из коптильной камеры и его скорости микропроцессором 26 установлено, что количество испаренной влаги в объеме 18,5% к общей массе рыбы было достигнуто при продолжительности подсушки 1,9 ч:
здесь  среднее значение влагосодержания сушильного агента на выходе из коптильной камеры за время подсушки; х1=0,0104 кг/кг - влагосодержание сушильного агента на входе в коптильную камеру; ρсв = 1,0 кг/м3 - плотность абсолютно сухого воздуха; F=4,5 м2 - площадь сечения коптильной камеры; v=3,0 м/с - скорость движения сушильного агента, τ = 1,9 ч - время подсушки.
среднее значение влагосодержания сушильного агента на выходе из коптильной камеры за время подсушки; х1=0,0104 кг/кг - влагосодержание сушильного агента на входе в коптильную камеру; ρсв = 1,0 кг/м3 - плотность абсолютно сухого воздуха; F=4,5 м2 - площадь сечения коптильной камеры; v=3,0 м/с - скорость движения сушильного агента, τ = 1,9 ч - время подсушки.
Таким образом, за 1 ч 54 мин влажность рыбы снизилась с 76,5% до 58%, что соответствует технологическому регламенту. При выполнении этого условия микропроцессор прекращал процесс подсушки и начинал собственно процесс холодного копчения.
Процесс холодного копчения осуществлялся в течение 24 ч при температуре коптильного дыма (296±0,5) К, его скорости (0,5±0,1) м/с, относительной влажности (55±1)%, концентрации (дымности) (65±2)%.
Стабилизация концентрации коптильного дыма в области заданных значений достигалась микропроцессором при соотношении расходов опилок и воздуха на входе в дымогенератор 1:200. Для копчения использовались опилки и стружка, состоящие из древесины дуба и клена, с начальной влажностью (40±2)%. Расход опилок составлял 20 кг/ч, а расход воздуха 4000 м3/ч. Концентрация коптильного дыма (дымность) определялась измерителем дыма типа АИД-210 "Энергия" (одноканальным фотометром), действие которого основано на измерении ослабления светового потока, прошедшего через контролируемую среду [4, с.264-265].
Коррекция текущего значения влагосодержания коптильного дыма на входе в коптильную камеру осуществлялась изменением его расхода в линии рециркуляции и поддерживалась в интервале значений (55±1)%.
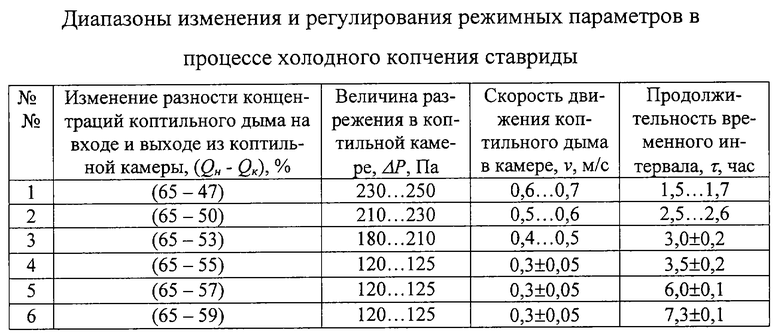
Качество процесса копчения оценивалось микропроцессором по разности концентраций коптильного дыма на входе и выходе из коптильной камеры в соответствии с диапазонами изменения, приведенными в таблице.
Установлено, что каждой разности концентраций коптильного дыма на входе и выходе из коптильной камеры, (Qн-Qк), %, при соответствующих значениях продолжительности каждого временного интервала соответствовала своя величина разрежения в коптильной камере (см. таблицу), которая поддерживалась воздействием на скорость коптильного дыма на выходе из коптильной камеры путем изменения мощности регулируемого привода вытяжного вентилятора. Возможные отклонения разности концентраций коптильного дыма на входе и выходе из коптильной камеры от заданного значения, обусловленные воздействием случайных возмущений, компенсировались изменением времени пребывания коптильного дыма в зоне копчения путем изменения его расхода на выходе из коптильной камеры.
Таким образом, предлагаемый способ автоматического управления по сравнению с базовым имеет следующие преимущества:
- обеспечивает высокую тепловую эффективность предлагаемой технологии за счет рационального использования материальных и энергетических ресурсов;
- позволяет получить готовый продукт высокого качества за счет накладываемых ограничений на управляемые параметры и их оперативной коррекции в условиях случайных возмущений на этапах подсушки и собственно копчения;
- обеспечивает снижение удельных энергозатрат на 15-20% за счет поддержания наиболее рациональных технологических режимов подсушки и копчения;
- обеспечивает высокую точность и надежность управления.
Источники информации
1. Чупахин В.М. Технологическое оборудование рыбообрабатывающих предприятий. - М.: Пищевая промышленность, 1976. - 472 с.
2. Никитин Б. Н. Основы теории копчения рыбы. - М.: Легкая и пищевая промышленность, 1982. - 248 с.
3. Шиф И.Г. Тепловое оборудование рыбообрабатывающих предприятий. - М.: Легкая и пищевая промышленность, 1981. - 224 с.
4. Промышленные приборы и средства автоматизации: Справочник /В.Я.Баранов, Т. Х. Безновская, В.А.Бек и др.; Под общ. ред. В.В.Черенкова. Л.: Машиностроение. Ленингр. отд-ние. 1987. - 847 с.
Изобретение может быть использовано при автоматизации процесса холодного копчения рыбной продукции. Способ автоматического управления процессом холодного копчения рыбы предусматривает стабилизацию температуры и скорости коптильного дыма, а также поддержание его относительной влажности с коррекцией управления. Рыбу после подсушки сушильным агентом подвергают обработке коптильным дымом с его частичной рециркуляцией. Дополнительно измеряют влагосодержание сушильного агента на входе и выходе из коптильной камеры, скорость сушильного агента на входе в коптильную камеру, соотношение расходов опилок и воздуха на входе в дымогенератор, концентрацию коптильного дыма на входе и выходе из коптильной камеры, величину разрежения в коптильной камере. По текущим значениям влагосодержания сушильного агента на входе и выходе из коптильной камеры и скорости сушильного агента определяют текущее значение количества испаряемой влаги за время подсушки и при достижении ею заданного значения прекращают подсушку рыбы и начинают ее копчение. Устанавливают заданное значение концентрации коптильного дыма на входе в коптильную камеру воздействием на соотношение расходов опилок и воздуха на входе в дымогенератор, осуществляют коррекцию текущего значения влагосодержания коптильного дыма на входе в коптильную камеру путем изменения его расхода в линии рециркуляции и стабилизируют разность концентраций коптильного дыма на каждом временном интервале процесса копчения воздействием на величину разрежения в коптильной камере путем изменения мощности привода вытяжного вентилятора. Изобретение направлено на повышение точности и надежности управления процессом холодного копчения рыбы, улучшение качества готовой продукции, снижение удельных энергетических затрат. 1 ил., 1 табл.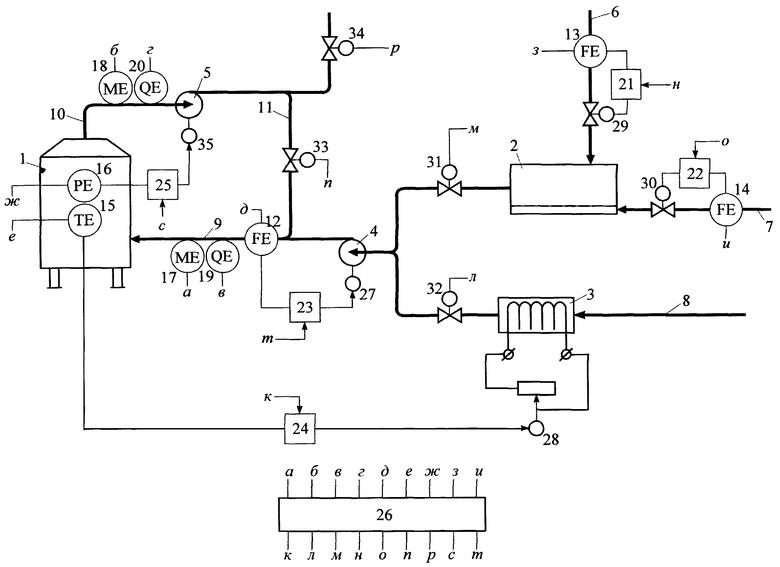
Способ автоматического управления процессом холодного копчения рыбы, предусматривающий обработку рыбы после подсушки коптильным дымом с его частичной рециркуляцией, измерение влагосодержания, скорости и температуры сушильного агента в процессе обработки, концентрации коптильного дыма на входе в коптильную камеру, соотношения расходов опилок и воздуха в дымогенераторе с последующим регулированием всех параметров, отличающийся тем, что дополнительно измеряют влагосодержание сушильного агента на выходе из коптильной камеры, концентрацию коптильного дыма на выходе из коптильной камеры, величину разрежения в коптильной камере, по текущим значениям влагосодержания сушильного агента на входе и выходе из коптильной камеры и скорости сушильного агента определяют текущее значение количества испаряемой влаги за время подсушки и при достижении ею заданного значения прекращают подсушку рыбы и начинают процесс копчения, в течение которого стабилизируют разность концентраций коптильного дыма на входе и выходе из коптильной камеры на каждом временном интервале воздействием на величину разрежения в коптильной камере путем изменения мощности привода вытяжного вентилятора.
| МИЛЛЕР Б.Н | |||
| Зарубежные механизированные установки для копчения рыбы | |||
| Серия IX: Продовольственное машиностроение | |||
| - М.: ЦИНТИМаш, 1962, с.17-37 | |||
| КОПЧЕНИЯ РЫБЫ | 0 |
|
SU269697A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ КОМБИНИРОВАННЫМ ВАРОЧНО-СУШИЛЬНЫМ ПРОЦЕССОМ ОБРАБОТКИ СЫПУЧЕГО ПРОДУКТА | 1996 |
|
RU2113132C1 |
| Устройство для поддержания конвейерной ленты в месте ее загрузки | 1977 |
|
SU602423A1 |

