Изобретение относится к системам управления газонапорных станций.
Известен пневмогидравлический привод для запорно-регулирующей арматуры, содержащий пневмоцилиндры, поршни, поворотный механизм, конечные выключатели [1] . Техническими недостатками этого привода являются: наличие двух рабочих тел - газа и масла, наличие подвижных трущихся уплотнений, что снижает надежность, ресурс и долговечность привода и усложняет его эксплуатацию.
Известен пневмогидравлический привод антипомпажного клапана, содержащий систему управления, двигатель, связанный через механическую передачу с выходным элементом привода с возвратно-поступательным движением [2]. Техническими недостатками этого привода также являются наличие двух рабочих тел газа и масла, наличие подвижных трущихся уплотнений, что снижает надежность, ресурс и долговечность привода и усложняет его эксплуатацию.
Наиболее близким, по своей технической сущности к описываемому, является пневматический привод, содержащий систему управления, пневматический струйный двигатель, связанный через механическую передачу с выходным элементом привода с возвратно-поступательным движением, при этом механическая передача содержит муфту ограничения передаваемого момента, ручной дублер и несамотормозящуюся пару ходовой винт - гайка, причем ходовой винт имеет возможность осевого перемещения и связан с выходным элементом привода и с пружинами сжатия (RU 2131065 C1, 27.05.1997).
Техническими недостатками данной конструкции является ее сложность, большие габариты, обусловленные наличием двух направляющих пазов в разных деталях корпуса, четырех ползунов, большими длинами цапф.
Другими недостатками данной конструкции является также наличие устройства ограничения максимальной величины передаваемого момента, что существенно усложняет конструкцию привода, снижает его надежность и усложняет эксплуатацию.
Технической задачей изобретения является создание пневматического привода для антипомпажных регулирующих клапанов, обладающих повышенной надежностью и ресурсом и долговечностью, способного работать в расширенном диапазоне давлений газа в трубопроводе.
Эта техническая задача решается согласно изобретению за счет того, что пневматический привод, содержащий систему управления, пневматический струйный двигатель, связанный через механическую передачу с выходным элементом привода с возвратно-поступательным движением, при этом механическая передача содержит муфту ограничения передаваемого момента, ручной дублер и несамотормозящуюся пару ходовой винт - гайка, причем ходовой винт имеет возможность осевого перемещения и связан с выходным элементом привода и с пружинами сжатия, согласно изобретения выполнен так, что с гайкой соединено соосно храповое колесо, входящее в зацепление с пневмомеханическим управляемым фиксатором.
Применение несамотормозящейся винтовой передачи и пружинного устройства возврата привода в крайнее положение и управляемого устройства фиксации привода в крайнем положении обеспечивает надежное срабатывание привода при падении давления газа в трубопроводе при аварийных ситуациях.
Движущий момент струйного двигателя зависит от расхода газа (а не от давления, как в поршневом двигателе), что позволяет расширить диапазон рабочего давления газа практически без изменения конструкции привода.
На фиг.1 изображена схема пневматического привода для антипомпажных регулирующих клапанов.
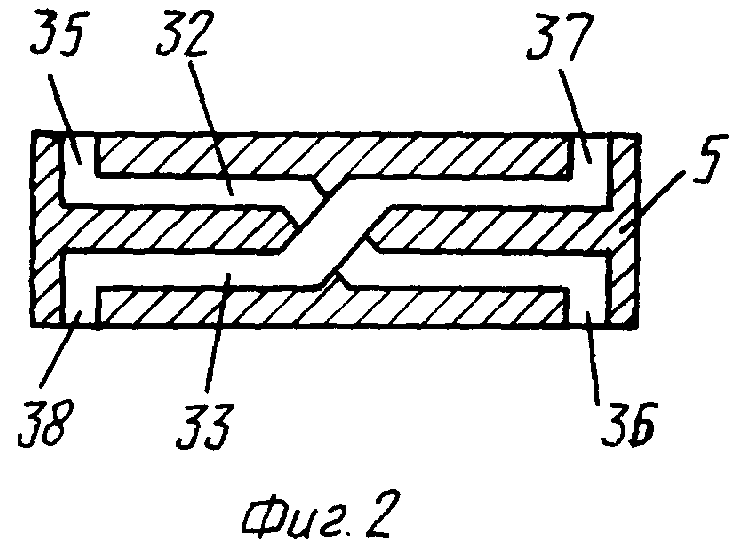
На фиг.2 изображена схема газопроводящих каналов струйного двигателя.
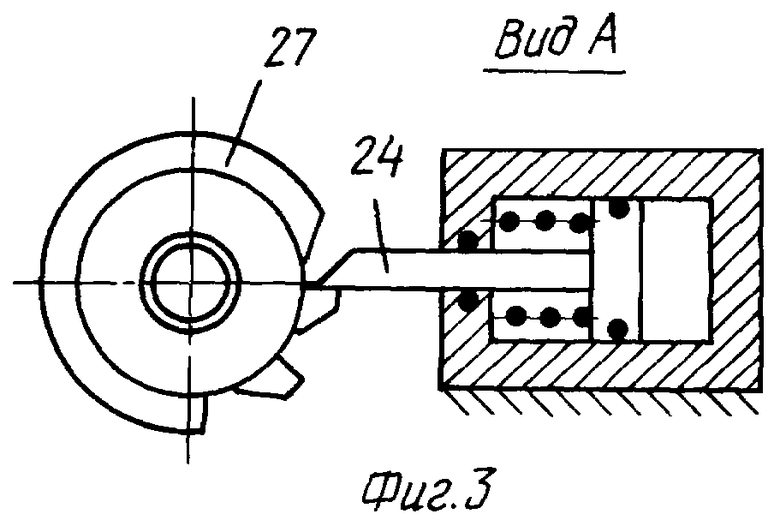
На фиг.3 приведен вид по А фиг.1.
Пневматический привод для антипомпажных регулирующих клапанов содержит систему управления 1, включающую в себя датчик обратной связи 2, пневматический струйный двигатель 4 с ротором 5, механическую передачу 6, включающую в себя муфту ограничения передаваемого момента 7, ручной дублер 8, несамотормозящуюся винтовую пару, содержащую ходовую гайку 10 и ходовой винт 11, при этом винт 11 имеет возможность возвратно-поступательного движения и связан через диск 14 с пружинами 15, при этом конец винта 11 соединен с выходным элементом 16 привода, связанным с антипомпажным регулирующим клапаном (не показан). Привод содержит также пневмомеханический управляемый фиксатор, включающий в себя пневмоцилиндр 20 с камерами 21, 22, поршень 23 со штоком 24, пружину 25, при этом конец штока 24 подвижно соединен с храповым колесом 27, жестко соединенным с гайкой 11. Привод содержит также подводящие патрубки 30, 31, соединяющие систему управления 1 через осевые каналы в роторе соответственно с каналами 32, 33 и соплами 35, 36 и 37, 38.
Работа привода
При работе антипомпажной системы обычно требуется быстрое открытие антипомпажного регулирующего клапана и медленное (программное) закрытие клапана.
При этом в случае падения давления в газопроводе ниже допустимого (в экстремальных ситуациях) антипомпажный регулирующий клапан должен открываться и находиться в открытом состоянии.
Пневматический привод работает следующим образом.
При закрытом антипомпажном регулирующем клапане (фиг.1) пружины 15 сжаты и газ с давлением P0 из газопровода или другого источника, например баллона, подается системой управления в полость 22 и поршень 23 сжимает пружину 25 и концом штока 24 фиксирует положение храпового колеса 27 и удерживает привод в крайнем положении.
При подаче сигнала со стороны системы управления на срабатывание привода газ из газопровода подается в полость 21 и перемещает поршень 23 и шток 24 вправо и освобождает храповое колесо 27. Под действием пружины 15 ходовой винт 11 перемещается вверх, перемещая выходной элемент 16 привода до второго крайнего положения. При движении винта ходовая гайка 10 и связанный с ней через механическую передачу ротор вращается. Для уменьшения скорости движения привода или обеспечения требуемого закона движения (при необходимости) по сигналу системы управления 1 газ из газопровода подается через патрубок, например, 30 в ротор 5 струйного двигателя 4 и, протекая по каналу, например 32, и вытекая из сопел 35, 36 создает требуемый тормозящий момент.
Для движения привода в обратную сторону по сигналу системы управления 1 сжатый газ из газопровода подается через патрубок 31 и через осевой канал ротора в канал 33 и сопла 37, 38.
Вытекая из сопел, газ создает крутящий момент на валу ротора, который передается через механическую передачу на гайку 10, которая, вращаясь, перемещает ходовой винт 11 с выходным элементом 16 вниз.
При превышении величины динамического момента при остановках привода в крайних положениях допустимой величины, определяемой из условий прочности или жесткости конструкции привода, муфта ограничения передаваемого момента 7 срабатывает и поглощает кинетическую энергию подвижных частей привода.
При падении давления газа в трубопроводе ниже допустимого в экстремальных ситуациях давление газа в камерах 21, 22 также падает и пружина 25 перемещает поршень 23 со штоком 24 вправо, освобождая храповое колесо 27. Под действием пружин 15 ходовой винт 11 перемещается вверх, обеспечивая требуемое в этом случае положение выходного элемента 16.
Источники информации
1. А. Ф. Гуревич, О.Н. Заринский, Ю.К. Кузьмин. Справочник по арматуре для газо- и нефтепроводов. Ленинград, "Недра", Ленинградское отделение, 1988 г., стр.383.
2. Система защиты от помпажа компрессорных газоперекачивающих станций фирмы "Моквенд" ("Mokved"). Инструкция по установке, эксплуатации и техобслуживанию. Стр.4,5.
Пневматический привод предназначен для антипомпажных регулирующих клапанов газонапорных станций. Привод содержит систему управления, пневматический струйный двигатель, связанный через механическую передачу с выходным элементом привода с возвратно-поступательным движением, при этом механическая передача содержит муфту ограничения передаваемого момента, ручной дублер и несамотормозящуюся пару ходовой винт - гайка, причем ходовой винт имеет возможность осевого перемещения и связан с выходным элементом привода и с пружинами сжатия, при этом с гайкой соединено соосно храповое колесо, входящее в зацепление с пневмомеханическим управляемым фиксатором. Технический результат - повышение надежности. 3 ил.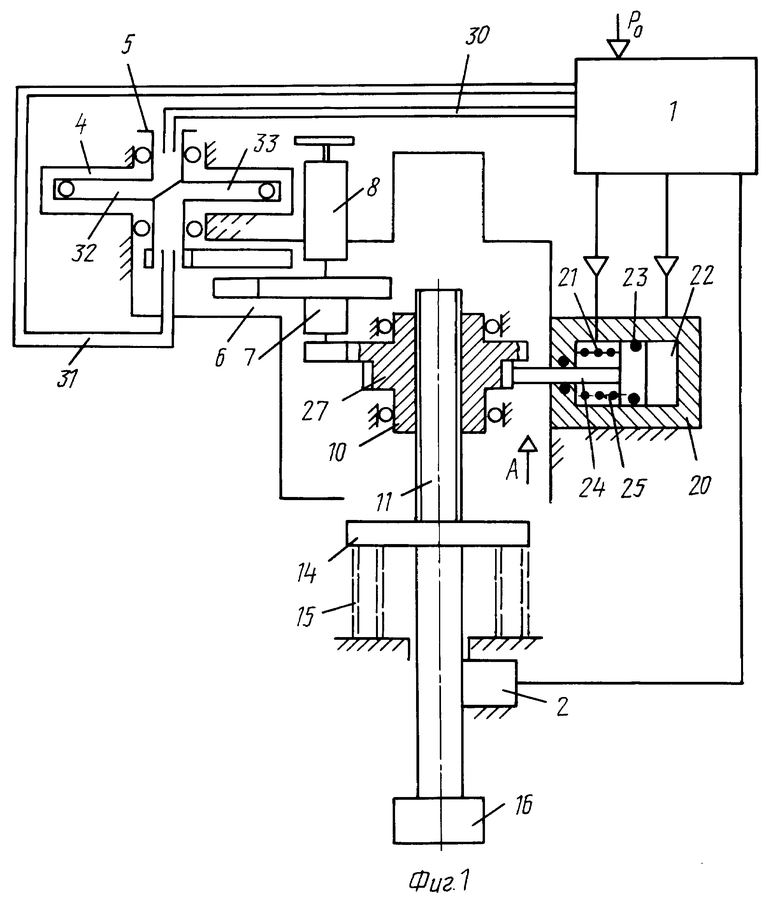
Пневматический привод, содержащий систему управления, пневматический струйный двигатель, связанный через механическую передачу с выходным элементом привода с возвратно-поступательным движением, при этом механическая передача содержит муфту ограничения передаваемого момента, ручной дублер и несамотормозящуюся пару ходовой винт - гайка, причем ходовой винт имеет возможность осевого перемещения и связан с выходным элементом привода и с пружинами сжатия, отличающийся тем, что с гайкой соединено соосно храповое колесо, входящее в зацепление с пневмомеханическим управляемым фиксатором.
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД | 1994 |
|
RU2050478C1 |
| ПНЕВМАТИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД И СТРУЙНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2064606C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ, ПРЕОБРАЗОВАТЕЛЬ ВРАЩЕНИЯ И РАСПРЕДЕЛИТЕЛЬ ДЛЯ ПНЕВМАТИЧЕСКОГО (ГИДРАВЛИЧЕСКОГО) СЛЕДЯЩЕГО ПРИВОДА | 1995 |
|
RU2087752C1 |
| ПНЕВМАТИЧЕСКИЙ (ГИДРАВЛИЧЕСКИЙ) СЛЕДЯЩИЙ ПРИВОД, СТРУЙНЫЙ ДВИГАТЕЛЬ, РАСПРЕДЕЛИТЕЛЬ И БЛОК КОНЕЧНЫХ ВЫКЛЮЧАТЕЛЕЙ | 1995 |
|
RU2093715C1 |

