54) СПОСОБ БАЛАНСИРОВКИ РОТОРОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки роторов | 1979 |
|
SU896437A2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| Способ сборки и балансировки высокооборотных роторов и валопроводов авиационных газотурбинных двигателей и газоперекачивающих агрегатов | 2022 |
|
RU2822671C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2018 |
|
RU2694142C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 1987 |
|
RU2079120C1 |
| СПОСОБ КОМПЕНСАЦИИ ДИСБАЛАНСА | 2004 |
|
RU2279043C1 |
| СПОСОБ ДИАГНОСТИКИ И ОЦЕНКИ ВИБРОАКТИВНОСТИ СТАНКОВ, РАБОТАЮЩИХ С ЛЕЗВИЙНЫМ ИНСТРУМЕНТОМ | 2006 |
|
RU2332652C1 |
| Способ балансировки ротора с применением алгоритма плавного разгона | 2017 |
|
RU2655731C1 |
1
Изобретение относится к с ласти бапансирс очиоё техшшг g может быть исвольаоваао в машивостроейви.
Известш способ балаасировкн роторов, по которому }гстаВ1Шпе{ш Еса онорах ротор разговяют до частоты балавсщкшйй,, замеpsaar &елвч)шы в углы яач&пьшах айсбалаясов в двух плоскостях ta}ppeK2iH0, затем к ротору орнгрецлздог корректирующие грузы вр полнело йШЕамгческого уравновэшивання р-J. Недостатком способа является невььсокая провзводнтепшос-уь процесса, так как оолвсзе уравновешевавие осуществляется при веоовокрш ом разгодё ротора до частоты баласюировки,
Известен также способ, заключающийся в том, что ротор, уставовлев}шй на опорах, разговяют до ч;астоты балансировки, замеряют величины и углы начальных дисбалансов в двух плоскостях коррекции, затем по ливида«1 действия начальных дисбалансов в указанных плоскостях производят коррекцию величин Дисбалансов. Балавс5фовЕу считают достаточной.когда остаточные дисбалансы ле жат в пределах допустимых дисбалансов {Sj..
При балансировке по зтому способу значение углов схгтаточЕых дисбалансов не нормируется, В плоскостях коррекции они могут быть совершенно случайными. Это приводит к увеличению динамическвх нагрузок на- эксплуатационвой частоте вращения за счет прироста динамического смещения центра массы ротора вследствие зазоров в подшипниках и податливости опор роторов.
Цель изобретения - снижение динамических нагрузок на опоры на эксплуатаднонной частоте вращения ротора. Это достигается тем, что в. одной из плоскостей производят коррекцию массой величину которой и ее угловое положение гтюсительно начального дисбаланса выбирают при минимальной реакции опор, которая достигается при одинаковом направлении остаточных дисбалансов в плоскостях коррекции для двухконсольного ротора н при прот шополайсном направлении остаточных дисбалансов в плсюкостях коррекции дпя двухконсопьного ротора и при проги- вопогсожном направлении остаточных дисбапа сов дпй межопорного рогорэоJ
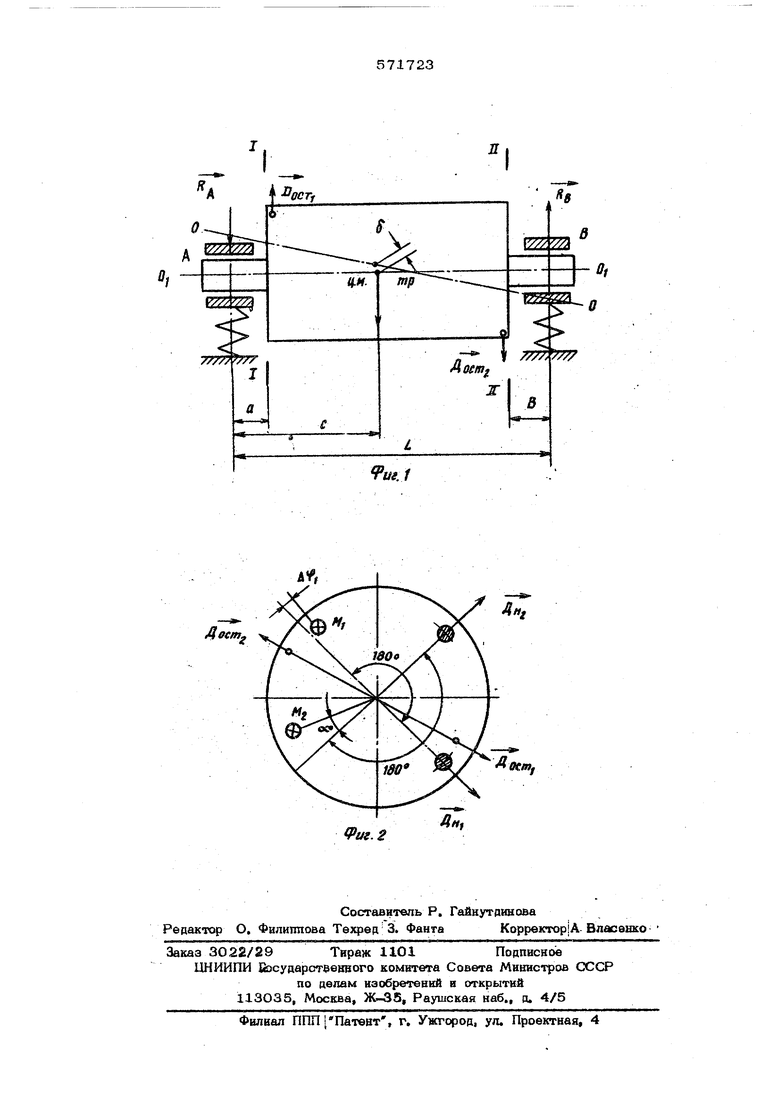
На фиг. 1 изображепа схема межопорного ротора, вид в плане на фиг. 2 - то же, виа сбоку. Установленный на опорах ротор разгоняю до Частоты врашения при балансировке. Пос ле того замеряют величины и углы начальных дисбалансов в двух плоскостях коррекции: Л для плоскости I-I в Дн« дая Ш10СКОСТВ П-Н. По лввиям действия начальвых двсбалайсов в этах плоскостях проазводят коррекцшо величав дисбалансов путем внесения корректврукядей массы клн нутем съема материала до получения допустимых ачеавй остаточных дасбаланВ одной вз плоскостей коррекцйн, например в плоскости I-I, располагают коррвктируклцую массу М по ЛЕНЙИ йействия начального дш:бапавса Йц с доп псгтамой. ошибкой по углу t которая приводит к досустимому аначеашо оотаточвотю йисба лаяса бдаг Здесь же замеряют н фиксируют угои остаточвсвО ансбалавса В {фугой ялоскостг раеволатают кой вкпфу :щую массу w® GO смешевием от дейедайй мачальвого йис- 15 баланса 0ц на угоя А . При угол о4 г велгавну мас« 2 выбирают так, что хячша скя«5Р йос о дисбалавса , не превышала sonycKaj; а е|Ч1 наяравлен«е было прбтввовш1адш& ва8 1авленш) а Проваведя контрояьш ,{ катщюгт уауг велвчшЕЫ в угзш o0 eifS345Hx двебалавсоВв После балавСЁ о&ЕВ вывщш га эксплуатщвюшую врашег гя, этом реашщи пророрниовальзы: .1ы -й-т f . ,:. 8в,кд ц --/V ,. ( - f - м iT« -g- г 2sJE ihiIl i2 i А . 1-1L) ft 8 peasKss опор: о - углайая частота вращения ротора. -масса pOTOpaj -динамическое смешевгие пент- 45 ра массы ротора на эксяпуатационйой часто-/ те вращения ;- Ц - расстояние между опорами pOTopaf: С - расотояние масс ро-50 тора от опоры А| / 30 35 i 40 а - расстойние плоскости коррекции 1-1 от опоры А; I .- расстояние плоскости коррекции ИП от опоры В. За счет того, что динамичесиве усилия . Дост 60() и AcKTgOjb имеют разное направление, их модули вычитаются из реакпий опор, благодаря чему снижаются опорные реакции при данном способе балансировки. Формула изобретения 1 Способ балансировки роторов, заключакйпМся в том, что установлекный на опора ротор разгоняют до частоты балансировки, замерщот величины и углы начальных дисбалансов в двух плоскостях коррекции, затем по линиям действия начальных . дисбалансов в указанных плоскостях производят коррезодию величви дисбаланса до получения допустимых значений остаточйых дисбалансов, положение которых фиксируют пе величине, и нащ)авлевшо, о т л а ч а }о ш и йр я тем, что, с целью снижения динамических нагрузок ка опоры, в одной из i плоскостей производят коррекцию массой, которой я ее.угловое положение отйосйтен1«о начальйого;дисбаланса выбирают при мшамав В 1К реакпйв опор. 2 Способ по н т, п И я а ю щ и йс я тем, что дан даухкошольвдго минимальная редкая опор достигается при одинаксеом найравленке остаточных дисбалавсов в плоскостях коррекции, Зе Способ по п 1, отличающийс я тем, что для межопорного ротора минимальвая реакция опор достигается при противоположном направлении остаточных дисбалансов в плоскостях коррекции . Источники информации, принятые во внимание при экспертизе; 1 Авторское свидетельство СССР № 99834, кл.&О М 1/04 1854, , 2..Левит М, Е., Ройзман В. Т.,Вибрацдд g уравновешивание роторов авиадвигателей, М. Машаносчроенне, 197О стр. 65-70.
JOCTJ
