Изобретение относится к балансировочной технике, а именно к балансировке карданных передач и может быть использовано для определения и устранения неуравновешенности изделий.
Известен способ динамической балансировки вращающихся узлов и деталей механизмов («Основы балансировочной техники». /Под редакцией Щепетильникова В. А., М., Машиностроение, 1975 г., т.1). По этому способу определяют наибольшее смещение оси вращения балансируемого изделия от его геометрической оси и вычисляют величину и угловую координату неуравновешенности.
Недостаток способа в ограниченных функциональных возможностях, так как отсутствует возможность выполнять балансировку при рабочих нагрузках, что снижает точность и достоверность результатов балансировки. Обкатка и определение неуравновешенности карданной передачи на одной рабочей позиции не предусмотрены.
Известно также устройство для осуществления этого способа, содержащее основание, привод вращения, механизм передачи вращения балансируемому изделию, виброизмерительные системы, закрепленные на опорах, датчики и измеритель.
Недостаток устройства - отсутствие нагружателя для создания нагрузочного вращающего момента, сложность конструкции механизма передачи вращения от привода вращения и люлек виброизмерительных опор и дополнительный дисбаланс от биений деталей в соединительной цепи.
Известен способ динамической балансировки карданных передач (RU 222 5603 C2 G01R M1/24) - принято за прототип.
По данному способу карданную передачу вращают с помощью привода вращения, определяют величину и угловую координату неуравновешенности и устанавливают балансировочные грузы на вал карданной передачи. Затем, сместив карданы, измеряют неуравновешенность, которую компенсируют, устанавливая балансировочные грузы в плоскостях, проходящих через крестовины карданов, и проводят обкатку карданной передачи. После этого возвращают карданы в исходное положение и, убрав фиксацию от колебаний виброизмерительных опор, окончательно балансируют карданную передачу.
Устройство для осуществления данного способа содержит основание, виброизмерительные опоры, привод вращения. Каждая виброизмерительная опора содержит люльку, устройство блокировки колебаний и фиксатор углового положения люльки, а привод вращения соединяется с карданной передачей через шпиндель.
Недостатки способа заключаются в том, что окончательную балансировку карданной передачи проводят без ее нагружения, поэтому неуравновешенность в условиях, соответствующих рабочим, не определяется. Это снижает точность балансировки и уменьшает надежность при эксплуатации карданной передачи. Балансировочные грузы, компенсирующие неуравновешенность, вначале устанавливают на вал карданной передачи. После параллельного смещения карданов в горизонтальной плоскости другие балансировочные грузы устанавливают в плоскостях, проходящих через крестовины карданов. Профиль поверхности карданов сложный и установка балансировочных грузов вызывает затруднения. К тому же закрепление балансировочных грузов на карданах, а при окончательной балансировке учет их величины в массе балансировочных грузов, устанавливаемых на вал карданной передачи, из-за разницы радиусов кардана и вала усложняет балансировку. При этом погрешность измерения возрастает.
Устройство, реализующее способ, имеет сложную конструкцию узла, обеспечивающего передачу вращения и сохранение соосности шпинделя и вала привода вращения при смещении карданов под разными углами относительно оси вращения карданной передачи. Детали механизма вращения должны быть прецизионными, чтобы исключить биения, влияющие на начальную установку балансируемой карданной передачи. Это усложняет конструкцию устройства и повышает порог достижимого остаточного дисбаланса. Соединение привода вращения со шпинделем должно допускать смещение кардана без люфтов.
Технический результат изобретения - повышение точности и упрощение конструкции.
Единый технический результат при осуществлении группы изобретений достигается тем, что в способе динамической балансировки карданных передач, заключающемся в том, что измеряют угловую координату и величину неуравновешенности на балансировочном устройстве, балансируют карданную передачу, устанавливая балансировочные грузы на вал, и выполняют обкатку карданной передачи, а затем возвращают карданы в исходное положение и устраняют дисбаланс, устанавливая балансировочные грузы в двух плоскостях коррекции на вал карданной передачи. Согласно изобретению карданную передачу вращают с одной скоростью одновременно за оба конца двумя приводами вращения, через балансировочные оправки, а для выполнения обкатки смещают приводы вращения относительно виброизмерительных опор.
Технический результат, включая определение дисбаланса при нагружении карданной передачи, достигается и в том случае, когда после обкатки к первому кардану прикладывают вращающий момент, а ко второму кардану прикладывают тормозящий момент, который меньше вращающего момента, измеряют значение дисбаланса по первой плоскости коррекции Д11 и значение дисбаланса по второй плоскости коррекции Д21 и устанавливают балансировочные грузы на вал карданной передачи на соответствующие плоскости коррекции, затем меняют местами точки приложения вращающего и тормозящего моментов, и вновь измеряют значение дисбаланса по первой плоскости коррекции Д12 и значение дисбаланса по второй плоскости коррекции Д22, и сравнивают измеренные значения, и, если выполняются соотношения
|Д11-Д12|≤δ1
|Д21-Д22|≤δ1,
где δ1 - абсолютная допустимая погрешность измерения дисбаланса, считают балансировку законченной, а если выполняются соотношения
|Д11-Д12|>δ1
|Д21-Д22|>δ1,
проводят дополнительную коррекцию с помощью балансировочных грузов, устанавливаемых на соответствующие плоскости коррекции по валу карданной передачи.
Указанный технический результат при осуществлении группы изобретений по объекту - устройству достигается тем, что в устройство для балансировки карданных передач, содержащее основание, две виброизмерительные опоры для размещения карданной передачи, привод вращения, датчики, причем в каждую виброизмерительную опору входит люлька, нижняя часть которой подвешена на пружинах, а виброизмерительные опоры установлены с возможностью перемещения вдоль основания и содержат устройство блокировки колебаний, дополнительно введены блок управления и второй привод вращения, причем оба привода вращения установлены через поворотное соединение на нижних частях люлек с возможностью поворота и фиксации углового положения, при этом оба привода вращения жестко соединены с карданной передачей, например, через балансировочные оправки и электрически соединены с блоком управления.
Технический результат достигается и в том случае, когда в него дополнительно введены две схемы запоминания и две схемы сравнения, причем первый датчик через последовательно соединенные первые схему запоминания и схему сравнения подключен к первому входу измерителя, а второй датчик через последовательно соединенные вторые схему запоминания и схему сравнения подключен ко второму входу измерителя, а приводы вращения выполнены в виде электротехнического устройства, имеющего возможность обеспечивать вращающий или тормозящий момент.
Вращение с одной скоростью карданной передачи за оба конца одновременно уменьшает влияние конструктивных факторов, вызванных большим расстоянием от места приложения вращающего момента до точки крепления противоположного конца кардана к шпинделю, что повышает точность балансировки и ведет к снижению порога достижимого остаточного дисбаланса.
Упрощение балансировки в предложенном способе достигается за счет использования вала привода вращения в качестве опор для балансируемой карданной передачи, что исключает люфты и зазоры в дополнительных деталях, и необходимость применения прецизионных деталей.
Также для достижения поставленной цели и дополнительно для расширения функциональных возможностей устройства после обкатки карданной передачи неуравновешенность измеряют, приложив попеременно к каждому кардану тормозящий или вращающий момент. Это позволяет измерять дисбаланс в режиме имитации эксплуатационных рабочих условий, что обеспечивает повторяемость величины дисбаланса, полученной при балансировке и при монтаже карданной передачи в рабочий механизм. Возможность совмещения обкатки и проверки на одной рабочей позиции без разборки конструкции исключает изменения взаимного положения деталей, что также влияет на точность измерений.
Изобретение поясняется чертежами.
На фиг.1 изображена структурная схема устройства динамической балансировки карданных передач с двумя приводами вращения.
На фиг.2 изображена структурная схема обработки электрических сигналов устройства динамической балансировки карданных передач с нагружателем.
Устройство содержит основание 1, на котором установлены с возможностью перемещения две виброизмерительные опоры 2, на которых симметрично относительно оси вращения закреплены плоские пружины 3, на нижних концах которых в каждой виброизмерительной опоре 2 закреплены нижние части люлек 4, на которых через поворотные соединения 5 установлены первый 6 и второй 7 приводы вращения, валы которых через балансировочные оправки 8 присоединены к карданам 9 балансируемой карданной передачи 10. На обеих сторонах виброизмерительных опор 2 установлены фиксаторы 11, препятствующие колебаниям плоских пружин 3. Приводы вращения 6, 7 подключены к блоку управления 12. Для измерения дисбаланса используются датчики 13, связанные с плоскими пружинами 3, выходы которых присоединены к измерителю 14.
В варианте устройства для балансировки карданной передачи с нагружателем датчики 13 через схемы запоминания 15 присоединены к схемам сравнения 16, выходы которых присоединены к измерителю 14.
Устройство работает следующим образом. Перемещая по основанию 1, виброизмерительные опоры 2 устанавливают в такое положение, чтобы можно было поставить на рабочую позицию между балансировочными оправками 8 балансируемую карданную передачу 10. С помощью балансировочных оправок 8 карданы 9 присоединяют к выходным валам первого 6 и второго 7 приводов вращения. Затем устанавливают фиксаторы 11 в положение, при котором диапазон колебаний плоских пружин 3 не превышает допустимый для работы первичных преобразователей 13. После предварительной подготовки, включив питание на приводы вращения 6, 7, запускают устройство в работу. С помощью плоских пружин 3 и датчиков 13 определяют отклонение оси вращения карданной передачи 10 от геометрической оси симметрии, определяют одним из известных способов величину и угловую координату неуравновешенной массы по первой и второй плоскостям коррекции, расположенным на концах вала карданной передачи 10. Неуравновешенную массу по первой плоскости коррекции и неуравновешенную массу по второй плоскости коррекции устраняют с помощью балансировочных грузов, устанавливаемых на плоскостях коррекции диаметрально противоположно месту, определенному как угловая координата расположения неуравновешенной массы. После этого поворачивают с помощью поворотного соединения 5 оба привода вращения 6, 7 так, чтобы карданы были параллельны друг другу и их геометрическая ось составляла бы одинаковый угол с осью вращения вала карданной передачи 10. При этом нижние части люлек 4 остаются на месте. Фиксируют с помощью фиксаторов 11 от колебаний плоские пружины 3 и по команде от блока управления 12 включают оба привода вращения 6, 7 в режим двигателя, причем направление вращения со стороны вала у приводов вращения должно быть противоположным. Таким образом обеспечивается при вращении перемещение карданов в шлицевых соединениях на валу карданной передачи 10, то есть проводится обкатка. По завершении этой операции карданы возвращают в исходное положение, освобождают плоские пружины 3 от фиксации и вновь включают оба привода вращения 6, 7 и измеряют окончательную величину дисбаланса по первой плоскости коррекции Д1 и окончательную величину дисбаланса по второй плоскости коррекции Д2.
В устройстве с нагружателем после устранения окончательного дисбаланса по первой и второй плоскостям коррекции по команде от блока управления 12 первый привод вращения 6 запускают в режим двигателя, который обеспечивает вращающий момент, приложенный к первому кардану, а второй привод вращения запускают в режим, который обеспечивает тормозящий момент, приложенный ко второму кардану.
При вращении карданной передачи 10 второй привод вращения 7 создает тормозящий момент, направленный противоположно вращающему моменту испытываемой карданной передачи 10. Измеряют значение дисбаланса по первой плоскости коррекции Д11 и значение дисбаланса по второй плоскости коррекции Д21 и устраняют неуравновешенность, устанавливая балансировочные грузы на вал карданной передачи дополнительно к установленным перед обкаткой. Значение дисбаланса по первой плоскости коррекции Д11 и значение дисбаланса по второй плоскости коррекции Д21 запоминают с помощью схемы 15. Затем выполняется контрольное измерение. Для этого с блока управления 12 поступает команда, по которой первый привод вращения 6 запускается в режим, который обеспечивает тормозящий момент, приложенный к первому кардану, а второй привод вращения запускается в режим, который обеспечивает вращающий момент, приложенный ко второму кардану. Измеряют значение дисбаланса по первой плоскости коррекции Д21 и значение дисбаланса по второй плоскости коррекции Д22.. Измеренные значения дисбаланса сравнивают с помощью схем сравнения 16. При этом, если выполняются соотношения
|Д11-Д21|≤δ1
|Д12-Д22|≤δ1,
где δ1 - абсолютная допустимая погрешность измерения дисбаланса, считают балансировку карданной передачи законченной, а если выполняются соотношения
|Д11-Д21|>δ1
|Д12-Д22|>δ1,
проводят дополнительную коррекцию с помощью балансировочных грузов, устанавливаемых на вал карданной передачи на первой и второй плоскостях коррекции.
Предлагаемый способ и устройство для его реализации по сравнению с известными за счет непосредственной связи вала привода вращения и кардана без промежуточных прецизионных шпинделей упрощает коррекцию и уменьшает влияние технологических люфтов и биений на измерения, что повышает точность определения дисбаланса.
При использовании нагружателя карданная передача балансируется в условиях, близких к рабочим, что позволяет уменьшить технологический допуск на величину дисбаланса и повысить надежность работы и ресурс карданной передачи, отбалансированной в соответствии с требованиями данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| СТЕНД БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2010 |
|
RU2480727C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРА ЦБН, ОСНАЩЕННОГО СИСТЕМОЙ МАГНИТНОГО ПОДВЕСА, В СОБСТВЕННЫХ ОПОРАХ | 2021 |
|
RU2803403C2 |
| СПОСОБ ОЦЕНКИ ДИСБАЛАНСА РОТОРА | 1989 |
|
RU2010205C1 |
| СПОСОБ И УСТРОЙСТВО ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ РОТОРОВ | 2000 |
|
RU2208772C2 |
| Способ определения динамического дисбаланса ротора авиационного газотурбинного двигателя | 2016 |
|
RU2627750C1 |
| Стенд для обкатки карданных передач | 1988 |
|
SU1580193A1 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ | 2000 |
|
RU2185609C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА С ПРИВОДНОЙ МУФТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2387962C1 |
Изобретение относится к балансировочной технике и может быть использовано для балансировки карданных передач. Способ заключается в том, что при определении дисбаланса карданную передачу вращают с одной скоростью одновременно за оба конца двумя приводами вращения, а для обкатки смещают приводы вращения относительно виброизмерительных опор. Для устранения дисбаланса после обкатки попеременно к концам карданной передачи прикладывают вращающий и тормозящий моменты, измеряют дисбаланс по каждой плоскости коррекции сравнивают измеренные значения дисбаланса для каждой плоскости коррекции, и, если разность будет не больше допустимой погрешности измерения, считают балансировку законченной. Устройство содержит основание с установленными двумя виброизмерительными опорами с плоскими пружинами, на нижних концах опор закреплены люльки, на которые через поворотные соединения установлены приводы вращения, валы которых через балансировочные оправки присоединены к карданам карданной передачи. На сторонах виброизмерительных опор установлены фиксаторы. Приводы вращения подключены к блоку управления. Измеряют дисбаланс датчиками, подключенными к измерителю. В варианте устройства для балансировки карданной передачи с нагружателем датчики через схемы запоминания присоединены к схемам сравнения, выходы которых присоединены к измерителю. Для балансировки с нагружателем датчики через схемы запоминания присоединены к схемам сравнения, выходы которых присоединены к измерителю. Технический результат заключается в повышении точности балансировки и упрощении конструкции. 2 н. и 2 з.п. ф-лы, 2 ил.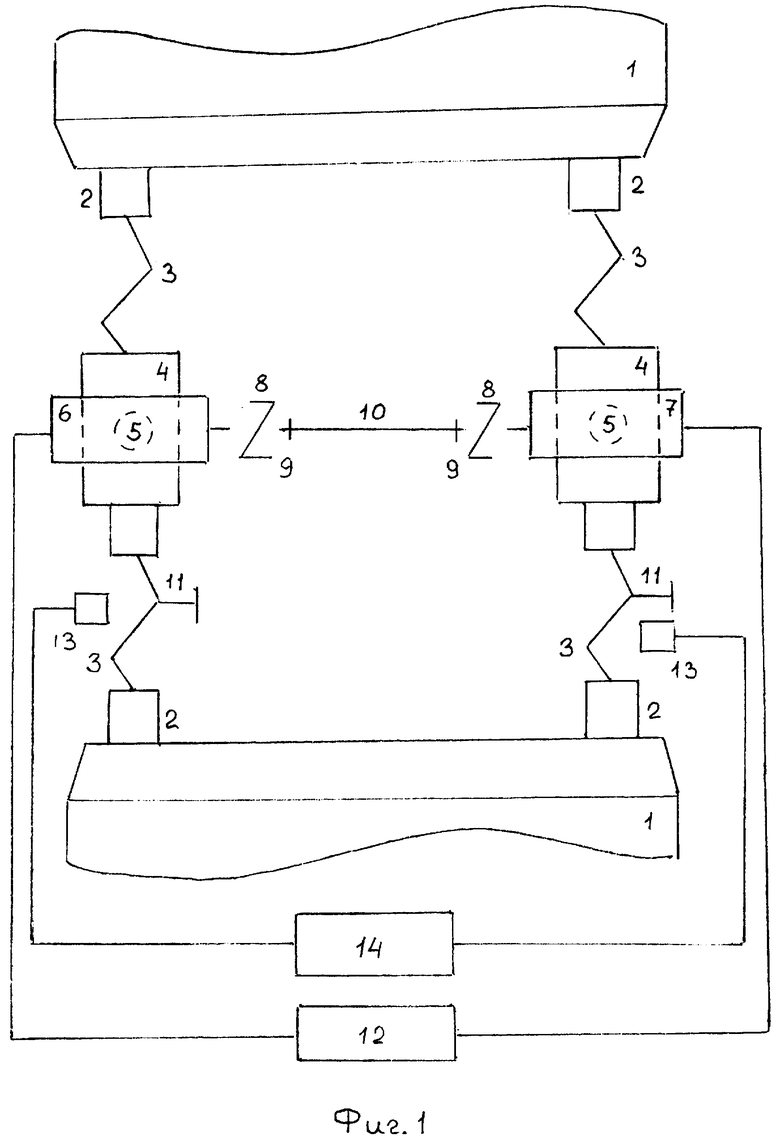
1. Способ динамической балансировки карданных передач, заключающийся в том, что измеряют угловую координату и величину неуравновешенности на балансировочном устройстве, балансируют карданную передачу, устанавливая балансировочные грузы на вал, и выполняют обкатку карданной передачи, а затем возвращают карданы в исходное положение и устраняют дисбаланс, устанавливая балансировочные грузы в двух плоскостях коррекции на вал карданной передачи, отличающийся тем, что карданную передачу вращают с одной скоростью одновременно за оба конца двумя приводами вращения через балансировочные оправки, а для выполнения обкатки смещают приводы вращения относительно виброизмерительных опор.
2. Способ по п.1, отличающийся тем, что для устранения дисбаланса после обкатки к первому кардану прикладывают вращающий момент, а ко второму кардану прикладывают тормозящий момент, который меньше вращающего момента, измеряют значение дисбаланса по первой плоскости коррекции Д11 и значение дисбаланса по второй плоскости коррекции Д21 и устанавливают балансировочные грузы на вал карданной передачи на соответствующие плоскости коррекции, затем меняют местами точки приложения вращающего и тормозящего моментов и вновь измеряют значение дисбаланса по первой плоскости коррекции Д12 и значение дисбаланса по второй плоскости коррекции Д22 и сравнивают измеренные значения и, если выполняются соотношения:
|Д11-Д12|≤δ1
|Д21-Д22|≤δ1,
где δ1 - абсолютная допустимая погрешность измерения дисбаланса, считают балансировку законченной, а если выполняются соотношения:
|Д11-Д12|>δ1
|Д21-Д22|>δ1
проводят дополнительную коррекцию с помощью балансировочных грузов, устанавливаемых на соответствующие плоскости коррекции по валу карданной передачи.
3. Устройство динамической балансировки карданных передач, содержащее основание, две виброизмерительные опоры для размещения карданной передачи, привод вращения, датчики, причем в каждую виброизмерительную опору входит люлька, нижняя часть которой подвешена на пружинах, а виброизмерительные опоры установлены с возможностью перемещения вдоль основания и содержат устройство блокировки колебаний, отличающееся тем, что в устройство дополнительно введены блок управления и второй привод вращения, причем оба привода вращения установлены через поворотное соединение на нижних частях люлек с возможностью поворота и фиксации углового положения, при этом оба привода вращения жестко соединены с карданной передачей, например, через балансировочные оправки, и электрически соединены с блоком управления.
4. Устройство по п.3, отличающееся тем, что в него дополнительно введены две схемы запоминания и две схемы сравнения, причем первый датчик через последовательно соединенные первые схему запоминания и схему сравнения подключен к первому входу измерителя, а второй датчик через последовательно соединенные вторые схему запоминания и схему сравнения подключены ко второму входу измерителя, а приводы вращения выполнены в виде электротехнического устройства, имеющего возможность обеспечивать вращающий или тормозящий моменты.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ КАРДАННЫХ ПЕРЕДАЧ | 2002 |
|
RU2225603C2 |
| Способ управления процессом приготовления шихты в производстве изопренового каучука | 1983 |
|
SU1134569A1 |
| Устройство для вертикального транспортирования сыпучих грузов по трубопроводу | 1980 |
|
SU918214A1 |
| DE 3844031 А, 19.12.1989 | |||
| DE 10042619 А, 01.03.2001 | |||
| DE 3906115 А, 05.09.1990. | |||

