Предлагаемое изобретение относится к механизмам, в частности к кривошипам с переменным радиусом.
Изобретение может быть применено различных машинах, станках, приборах, роботах, в которых используется возвратно-поступательное или колебательное движение рабочих органов, инструментов, исполнительных устройств с целью плавного изменения на ходу амплитуды рабочего хода или производительности, а также точной установки предельных положений перемещаемых устройств и т.п.
Известны эксцентриковые вибраторы, например, по авт. св. N 109048, кл. 46 h, 26 от 02.1956 г., обеспечивающие плавное изменение на ходу амплитуды колебаний рабочего органа за счет синхронного поворота двух вращающихся в противоположных направлениях валов.
Недостатки таких устройств обусловливаются используемым в них инерционном принципом действия. В этом случае характер вибрации определяется как силами инерции (Р), возникающими в вибраторе P = mω2r (где m - дебалансная масса, ω- круговая частота, r - радиус вращения центра тяжести (эксцентриситет дебалансира), так и параметрами вибрируемого объекта (массой, упругостью связей, силами трения и т.д.).
В результате требуемые режимы вибрации могут быть заданы только путем выполнения сложных расчетов либо экспериментальным путем. При этом неизбежны следующие недостатки.
1. При перемене частотного режима, в силу зависимости амплитуды от сил инерции дебалансира и вибрируемого объекта, требуется подрегулировка для поддержания заданной амплитуды.
2. Для сообщения низкочастотной и большеамплитудной вибрации массивным объектам необходимо использование достаточно массивных дебалансиров, в связи с чем предел изменения амплитуды вибрации у реальных устройств такого типа не может быть большим.
3. Из схем таких устройств (авт. св. N 108860 и авт. св. N 109048) следует, что для сообщения вибрации рабочему органу они должны сами вибрировать вместе с ним, что не всегда приемлемо, обусловливает более высокие требования к массово-прочностным параметрам вибрируемого объекта и существенно ограничивает возможность регулирования амплитуды вибрации на ходу без изменения частотного режима.
4. Такие устройства, очевидно, не могут обеспечить установку строго заданных предельных положений и перемещений рабочих органов, звеньев, объектов.
Известны эксцентрик с переменным эксцентриситетом (см. Артоболевский И. И. "Механизмы в современной технике", М, "Наука", 1970, т.1, N 498, с.299), через полый вал которого проходит вал, оканчивающийся шестерней, находящейся в зацеплении с зубчатой рейкой на диске эксцентрика. При повороте вала шестерня заставляет эксцентрик скользить по направляющим несущего диска, что приводит к изменению эксцентриситета. Это, в принципе, позволяет плавно и сравнительно точно регулировать амплитуду хода или вибрации рабочего органа или устройства, связанного с эксцентриком без изменения частотного режима, а также установку строго заданных предельных положений и перемещений рабочих органов звеньев, объектов независимо от оборотов привода, массы перемещаемых (вибрируемых) органов или устройств, упругости связей и других дрейфующих сил сопротивления движению.
Недостатками такого устройства являются невозможность изменения радиуса кривошипа на ходу без реверса привода и большие крутящие нагрузки на внутренний вал, передающиеся через реечное зацепление эксцентрика от вибронагрузок. Это обусловливают повышенные требования к необходимым устройствам фиксации заданного взаимоположения внутреннего полого валов эксцентрика, что усложняет конструкцию и снижает надежность ее работы. Это ограничивает область применения таких устройств.
Известен кривошип с переменным радиусом (см. Артоболевский И. И. "Механизмы в современной технике", М., "Наука", 1970, т.1, N 496, с.298), содержащий винт, входящий во вращательную пару с полым корпусом кривошипа и в винтовую пару с телом кривошипа, которое входит в поступательную пару с корпусом кривошипа.
Радиус описанного кривошипа меняют поворотом винта во время остановки привода. Это обеспечивает стабильность установленного радиуса кривошипа и позволяет плавно и предельно точно регулировать амплитуду хода или вибрации рабочего органа или устройства, связанного с кривошипом независимо от оборотов привода, массы перемещаемых (вибрируемых) органов или устройств, упругости связей и других переменных сил сопротивления движению (прототип).
Недостаток известного устройства - невозможность изменения радиуса кривошипа на ходу, что ограничивает область его применения. Кроме того, такое устройство обладает значительным дебалансом, возрастающим вместе с увеличением радиуса кривошипа.
Целью изобретения является обеспечение возможности произвольного регулирования радиуса кривошипа в пределах от нуля до максимума на ходу, а также автоматическая минимизация дебаланса кривошипа при изменениях его радиуса.
Поставленная цель достигается тем, что кривошип снабжен центрально расположенным в полом валу корпуса кривошипа валом, кинематически связанным с винтом и с устройством изменения угловой скорости этого вала без изменения угловой скорости или направления вращения корпуса кривошипа или его привода. Причем винт кривошипа выполнен двусторонним, с двумя резьбами разного направления, одна из которых служит для перемещения самого кривошипа, а вторая - для противоположного перемещения уравновешивающего его груза. Устройство изменения угловой скорости центрального вала выполнено в виде планетарного редуктора так, что кривошип связан с первым центральным колесом этого редуктора, водило соединено с центральным валом, а сателлиты входят в зацепление с первым центральным колесом и свободно вращающимся на валу вторым центральным колесом редуктора. Кроме того, водило и второе центральное колесо снабжены тормозными устройствами, расположенными с возможностью взаимодействия со стопорящими устройствами, органы управления которых выведены в удобное для оператора место. Тормозные устройства могут быть выполнены, например, в виде барабанов или дисков - зубчатых, лучевых, щеточных и т.п., а стопорящие устройства - в виде тормозных лент, колодок, кулачков, рычагов и т.п.
Изобретение будет понятно из следующего описания и приложенного к нему чертежа.
На чертеже приведена кинематическая схема нового устройства кривошипа с переменным радиусом.
Предлагаемое устройство включает: корпус кривошипа 1 с полым приводным валом 2, с двумя зубчатыми колесами на конце - ведущим 3, связанным с приводом 4, и первым центральным 5, находящемся в зацеплении с сателлитами 6 планетарного редуктора 7, тело кривошипа 8, расположенное в прямолинейных направляющих 9 корпуса кривошипа 1 и создающее с ним одну поступательную пару и уравновешивающий груз 10, расположенный с другой стороны корпуса 1 в направляющих 9 и образующий вторую поступательную пару; двусторонний винт 11, расположенный центрально параллельно направляющим 9 и образующий вращательную пару с корпусом кривошипа 1 и две винтовые пары - одну с кривошипом 8, а вторую с уравновешивающим его грузом 10, с жестко закрепленной на винте 11 конической шестерней 12; вал 13 внутри вала кривошипа 2 с конической шестерней 14 на конце, находящейся в зацеплении с конической шестерней 12 винта 11, соединенными с ним водилом 15 с сателлитами 6 планетарного редуктора и с тормозным устройством 16; второе центральное зубчатое колесо 17 с тормозным устройством 18, свободно сидящие на внутреннем валу приводного вала 2 устройство торможения 19 с органом управления 20 и несущую раму 21.
Тормозные устройства 16,18 могут быть выполнены, например, в виде барабанов или дисков - гладких, зубчатых, лучевых, щеточных и т.п., а устройства торможения 19 - в виде тормозных лент, колодок, кулачков, рычагов и т. п.
Устройство работает следующим образом.
Привод 4 через шестерню 3 на приводном валу 2, сидящем в подшипниках несущей рамы 21, приводит во вращение корпус кривошипа 1. Кривошип 8 сообщает соответствующее движение рабочим органам с полным ходом точно равным двум радиусам кривошипа. Нагрузка сопротивления движению рабочих органов воспринимается через тело кривошипа 8 его винтовой парой, с углом резьбы (нарезки), исключающим изменение радиуса кривошипа под действием нагрузки сопротивления, что обеспечивает стабильность амплитуды движения. При этом внутренний вал 13 со скрепленным с ним водилом, и тормозным устройством 16, и сидящим на подшипниках коническим колесом 17 с тормозным устройством 18 и приводной вал 2 вращаются с одинаковой угловой скоростью. Для изменения на ходу радиуса кривошипа 8 без изменения направления вращения привода 4 оператор воздействует на орган управления 20, который посредством устройства 19 останавливает (притормаживает) одно из тормозных устройств 16 или 18. При затормаживании устройства 16 вал 13 и сидящая на нем шестерня 14 начинают вращаться с меньшей угловой скоростью, чем корпус кривошипа 1 или полностью останавливается, вследствие чего через шестерню 12 приводится во вращение винт 11, производящий перемещение кривошипа 8 по его резьбе в направляющих 9 корпуса 1 в одну сторону. При затормаживании устройства 18 вал 13 и сидящая на нем шестерня 14 за счет облегания сателлитами 6 заторможенной звездочки 17, начинают вращаться с большей угловой скоростью, чем корпус кривошипа 1, вследствие чего через шестерню 12 винт 11 производит плавное перемещение кривошипа 8 в направляющих корпуса 1 в другую сторону. Одновременно с перемещениями кривошипа винт 11 производит противоположное перемещение в направляющих 9 уравновешивающего кривошип груза 10, что автоматически минимизирует общий дебаланс кривошипа.
Использование изобретения позволит независимо от оборотов привода, массы перемещаемых (вибрируемых) органов или устройств, упругости связей и других переменных сил сопротивления движению легко и точно регулировать на ходу амплитуду движения, производительность и предельные положения точных исполнительных органов приборов, роботов-манипуляторов, вибраторов, насосов, обрабатывающих станков и других устройств, которые приводятся в движение от кривошипных устройств.
По данному техническому предложению изготовлен механизм плавного изменения на ходу амплитуды вибрации оси подвеса маятниковых моделей плодов и ягод в мини-стенде для исследования процесса вынужденных колебаний маятника в связи с проверкой моделированием теорий вибрационного метода уборки урожая винограда и других ягод и плодов.
Предлагаемое изобретение надежно в работе, удобно в управлении и может найти широкое применение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1990 |
|
RU2013606C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820104A1 |
| ЭЛЕКТРОПРИВОД | 2000 |
|
RU2173420C1 |
| ПЛАНЕТАРНЫЙ ЦИКЛОИДАЛЬНЫЙ РЕДУКТОР С ПРЕДВАРИТЕЛЬНОЙ СТУПЕНЬЮ | 2012 |
|
RU2506477C1 |
| ПРИВОД ПЕРЕМЕЩЕНИЯ КЛЕТИ СТАНА ХОЛОДНОЙ ПРОКАТКИ ТРУБ | 1990 |
|
RU2030228C1 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |
| Инерционный трансформатор вращающего момента | 1990 |
|
SU1820105A1 |
| ТРАНСФОРМАТОР ВРАЩАЮЩЕГО МОМЕНТА ШАШКИНА | 1992 |
|
RU2073804C1 |
| ФРИКЦИОННЫЙ УСИЛИТЕЛЬ | 2003 |
|
RU2253769C2 |
| ДИФФЕРЕНЦИАЛЬНЫЙ КРИВОШИПНЫЙ ПРЕОБРАЗУЮЩИЙ МЕХАНИЗМ ПРИВОДА СТАНКА-КАЧАЛКИ | 2005 |
|
RU2303182C2 |
Изобретение предназначено для использования в машинах, станках, приборах и роботах для оперативного регулирования их производительности или амплитуды движений рабочих органов и исполнительных устройств. Новым в конструкции является то, что кривошип содержит устройство угловой скорости полого приводного вала без изменения угловой скорости или направления вращения самого кривошипа, выполнено в виде планетарного редуктора, сателлиты которого соединены с водилом. Водило соединено с центральным валом и снабжено тормозным устройством. Второе центральное колесо соединено с центральным валом с возможностью свободного вращения и снабжено тормозным устройством. Винт кривошипа выполнен двусторонним, с резьбой разного направления для обеспечения перемещения одновременно в разных направлениях кривошипа и уравновешивающего его груза. Данная конструкция обеспечивает увеличение надежности, удобство регулирования радиуса кривошипа, а также автоматическую минимизацию дебаланса. 1 ил.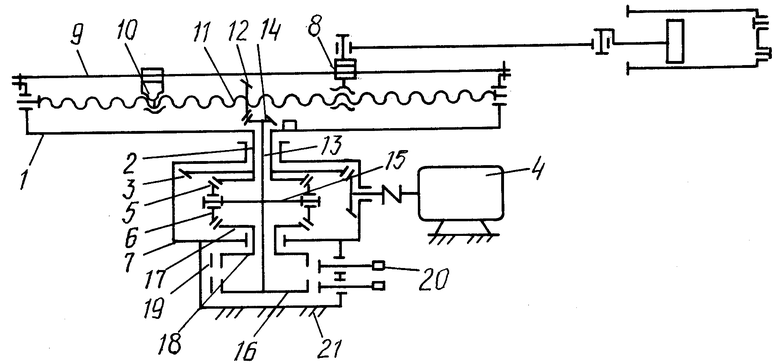
Кривошип с переменным радиусом, содержащий винт, входящий во вращательную пару с полым корпусом кривошипа и в винтовую пару с телом кривошипа, которое входит в поступательную пару с корпусом кривошипа, в полом приводном валу которого центрально расположен вал, кинематически связанный с винтом и с устройством изменения угловой скорости этого вала без изменения угловой скорости или направления вращения самого кривошипа, выполненным в виде планетарного редуктора с двумя центральными колесами, находящимися в зацеплении с сателлитами, причем первое центральное колесо соединено с приводным валом, отличающийся тем, что, с целью упрощения конструкции, увеличения надежности ее работы и удобства регулирования радиуса кривошипа, указанные сателлиты соединены с водилом, которое соединено с центральным валом и снабжено тормозным устройством, второе центральное колесо соединено с центральным валом с возможностью свободного вращения и снабжено тормозным устройством, винт кривошипа выполнен двусторонним, с резьбой разного направления, обеспечивающей одновременное перемещение в разных направлениях кривошипа и уравновешивающего кривошип груза для автоматической минимизации дебаланса.
| Вибростенд | 1960 |
|
SU138082A1 |
| И.И | |||
| Артоболевский | |||
| Механизмы в современной технике | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кинематографический аппарат | 1923 |
|
SU1970A1 |
| Вибромашина | 1977 |
|
SU713601A1 |
| Устройство для изменения радиуса кривошина | 1980 |
|
SU868398A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ С БЕССТУПЕНЧАТЫМ РЕГУЛИРОВАНИЕМ ДЛИНЫ ХОДА ВЫХОДНОГО ЗВЕНА | 1992 |
|
RU2067234C1 |

