Изобретение относится к машиностроению и может быть использовано в станкостроении, подъемно-транспортных машинах, автомобилестроении, авиастроении, железнодорожном транспорте, сельскохозяйственном и тяжелом машиностроении и других отраслях промышленности.
Известны усилители, которые входят в состав управляющих приводов фрикционных механизмов: тормозов и управляемых сцепных муфт (например, [1], с.271-275). Они предназначены для усиления управляющего воздействия привода на процесс взаимодействия фрикционных пар, а именно для создания и поддержания сил нормального давления на фрикционные поверхности. Необходимость усиления объясняется высокими значениями указанных сил нормального давления. Они в фрикционных механизмах могут быть на порядок и более выше сил трения, используемых для создания тормозных и передаваемых моментов.
Основной недостаток этих усилителей - они не используют преобразуемую или передаваемую с помощью фрикционных механизмов кинетическую или потенциальную энергию, их принцип действия основан на использовании посторонних видов энергии (электрической, электромагнитной, гидравлической, пневматической и других ([1], например, с.271-275)). Они вместе с источником питания, аппаратурой управления, исполнительными механизмами, коммуникациями образуют в машинах громоздкие, материалоемкие, энергоемкие системы, например, в поездах железнонодорожного транспорта - дополнительно десятки тонн из компрессоров, рессиверов, гидроцилиндров, пневмокамер, распределителей, трубопроводов и прочего оборудования.
Другим недостатком рассматриваемых усилителей является то, что они не обеспечивают возможность непосредственного использования сил нормального давления в фрикционных парах для создания тормозных и передаваемых моментов, то есть того, что в несколько раз может повысить нагрузочную способность и износостойкость фрикционных пар, так как нормальные силы могут быть на порядок выше сил трения.
Как недостаток следует отметить и неэффективность существующих усилителей. При всей сложности их конструкции они предполагают очень высокие значения усилий управления на их входе. Так, например, тормозной объемный гидропривод с пневмоусилителем ([1] с.271-272) предполагает усилие на педали управления до 250 Н. Этот же недостаток и у объемного гидропривода с вакуумным усилителем ([1] с.272-273). Усилия на его педали управления могут достигать 500-800 Н, что существенно препятствует использованию для управления фрикционными механизмами достижений промышленной электроники и электроавтоматики.
К недостаткам этих усилителей следует отнести и уменьшение коэффициента усиления при максимальной интенсивности торможения ([1] с.271-273).
Избавится от большинства указанных недостатков представляется возможным использованием фрикционного усилителя [2], (прототип). Он содержит корпус, смонтированный в нем планетарный зубчатый механизм в составе жестко связанного с валом центрального колеса, упруго связанного с корпусом водила и сателлита, соосно с которым установлен и жестко связан выполненный в виде диска с боковой фрикционной поверхностью тормозной шкив, и упруго связанную с корпусом тормозную колодку. Указанные водило, сателлит и тормозной шкив образуют прижимное устройство, выполняющее роль входа в усилитель, а тормозная колодка - выхода. Ее фрикционная поверхность расположена с возможностью создающего момент сопротивления вращению сателлита фрикционного взаимодействия с фрикционной поверхностью тормозного шкива под действием указанного прижимного устройства. Последнее оснащено приводом управления, например, в виде жестко связанной с водилом ручки управления и имеет упругую связь с корпусом усилителя, обеспечивающую фиксацию этого устройства в нейтральном положении, соответствующем отсутствию взаимного контакта фрикционных поверхностей тормозного шкива и тормозной колодки. Отношение радиуса начальной окружности сателлита к радиусу боковой фрикционной поверхности тормозного шкива больше коэффициента трения этой поверхности о фрикционную поверхность тормозной колодки.
Упругая связь тормозной колодки с корпусом выполнена с помощью, например, тарельчатой пружины, а на самом корпусе установлен жесткий упор, ограничивающий поворот водила в положении, при котором осадка указанной тарельчатой пружины соответствует установленному предельному значению силы прижима тормозного шкива к фрикционной поверхности тормозной колодки.
Благодаря такой конструкции фрикционного усилителя при нейтральном положении ручки управления центральное колесо и сателлит с тормозным шкивом вращаются свободно, так как боковая фрикционная поверхность шкива не контактирует с фрикционной поверхностью колодки.
При воздействии на ручку управления усилия, достаточного для ввода тормозного шкива в контакт с фрикционной поверхностью тормозной колодки, под действием окружной силы, передающей крутящий момент в зубчатом зацеплении центрального колеса с сателлитом, возникает прижим тормозного шкива к фрикционной поверхности колодки, и, как следствие, сила трения скольжения, создающая момент сопротивления вращению тормозного шкива и сателлита, а через сателлит и вращению центрального колеса. Величина этого момента, а с ним и усилия прижима, и окружного усилия в зубчатой паре, зависит от управляющего усилия и пропорциональна ему. При этом коэффициент пропорциональности и есть коэффициент управляемого усиления, который зависит от превышения отношения радиуса начальной окружности сателлита к радиусу тормозного шкива над значением коэффициента трения. Чем меньше это превышение, тем выше коэффициент усиления. При равенстве отношения указанных радиусов коэффициенту трения коэффициент усиления равен бесконечности, что соответствует режиму жесткого динамического торможения - стопорению.
От перегрузок, особенно при высоких значениях коэффициента усиления, усилитель предохраняет упругая связь тормозной колодки с корпусом, например тарельчатая пружина, и упор, который ограничивает поворот водила при достижении установленного предельного значения силы нормального давления в фрикционной паре, воспринимая на себя дальнейший прирост управляющего усилия.
Преимущества прототипа предлагаемого усилителя над известными в машиностроении усилителями состоят в следующем:
1. Исключается необходимость использования для усиления посторонних видов энергии и, как следствие, громоздкого, сложного и материалоемкого оборудования.
2. Сам усилитель одновременно является и составной частью самого фрикционного механизма (тормоза, муфты), что в свою очередь способствует снижению его материалоемкости.
3. Использование передаваемой или преобразуемой механической энергии для осуществления целевой функции фрикционного механизма снижает его энергоемкость.
4. Представляется возможным уменьшить усилия управления фрикционными механизмами по меньшей мере на порядок, что значительно расширяет возможности применения достижений электроники и электроавтоматики для этих целей.
5. Коэффициент усиления фрикционного усилителя-прототипа не уменьшается в зависимости от интенсивности взаимодействия его фрикционных пар, что выгодно отличает его, например, от пневматических и вакуумных усилителей, коэффициент усиления которых снижается при высоких значениях нагрузки ([1], с.271).
Перечисленные и другие достоинства усилителя-прототипа свидетельствуют о перспективности его применения в машиностроении.
К недостаткам усилителя-прототипа можно отнести следующее:
1. Зависимость усилий управления от интенсивности взаимодействия его фрикционных пар. Например, при работе его в составе тормоза высокая интенсивность торможения потребует значительных усилий управляющего привода. Это, хотя и в меньшей степени по сравнению с пневматическими и вакуумными усилителями, но значительно затруднит использование достижений электроники и электроавтоматики для управления фрикционными механизмами.
2. Область существования фрикционного усилителя-прототипа ограничивается условием  или
или  ,
,
где
r2 - радиус начальной окружности сателлита;
R - радиус фрикционной поверхности тормозного шкива;
f - коэффициент трения фрикционной поверхности тормозного шкива о фрикционную поверхность тормозной колодки.
Это ограничение в значительной мере может уменьшить область применения фрикционных усилителей.
В задачи настоящего изобретения входит следующее:
1. Уменьшение усилий управления фрикционным усилителем, входящим в состав фрикционного механизма, и, как следствие, уменьшение усилий управления фрикционным механизмом.
2. Достижение независимости усилий управления от степени нагруженности фрикционного механизма.
3. Расширение зоны управляемого усиления фрикционных усилителей.
4. Расширение технических возможностей и улучшение характеристик фрикционных усилителей.
Решение указанных задач достигается тем, что в фрикционном усилителе, который содержит корпус, смонтированный в нем планетарный зубчатый механизм в составе жестко связанного с валом центрального колеса, упруго связанного с корпусом водила и сателлита, соосно с которым установлен и жестко связан тормозной шкив, и упруго связанную с корпусом тормозную колодку и у которого указанные водило и сателлит с тормозным шкивом включены в состав выполняющего роль входа прижимного устройства, а роль выхода выполняет тормозная колодка, фрикционная поверхность которой расположена с возможностью фрикционного взаимодействия с тормозным шкивом, действие на водило силы упругой связи его с корпусом направлено против вращения центрального колеса, а жесткость этой связи, приведенная к вылету оси вращения сателлита относительно оси вращения водила, соответствует зависимости
qвпр=q· (ε -1),
где q - жесткость упругой связи тормозной колодки с корпусом;
 ,
,
где использованы ранее принятые обозначения.
Приведенная зависимость касается случая, когда ε >1 и в водиле установлен один сателлит с тормозным шкивом.
Представленная зависимость определена исходя из условия отсутствия на ручке управления усилителя усилий управления. Это не значит, что предмет изобретения теряет свойства усилителя в связи с отсутствием возможности изменять усилия на его входе. Соблюдение зависимости дает возможность изменением положения водила изменять коэффициент усиления при, например, постоянном, например, создаваемом окружной силой холостого хода в зубчатом зацеплении первоначальном усилии прижима тормозного шкива к тормозной колодке. Соответствие указанной зависимости жесткостей упругих связей с корпусом водила и тормозной колодки создает условие равновесия водила во всем диапазоне его угловых перемещений. Именно это составляет основу для решения поставленной задачи снижения усилий управления и достижения независимости их от степени нагруженности фрикционного механизма.
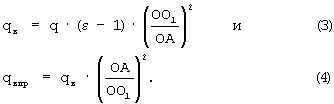
Предлагаемый усилитель предполагает возможность установки в одном водиле, например, с целью повышения нагрузочной способности нескольких сателлитов с тормозными шкивами, каждый из которых имеет возможность фрикционного взаимодействия с фрикционной поверхностью одной из упруго связанных с корпусом тормозных колодок. Для этого случая рассмотренная выше зависимость приобретает вид

n - число сателлитов;
i - порядковый номер сателлита.
Остальные обозначения приняты ранее. Эта зависимость справедлива для всех случаев, при которых приведенная жесткость упругой связи водила с корпусом qвпр есть величина положительная, что отражает направленность действия на водило усилия этой связи против вращения центрального колеса. Зависимость справедлива и для случаев, когда в составе прижимного устройства в одном водиле установлены сателлиты, для которых значение ε больше, равно или меньше единицы. Это расширяет зону управляемого усиления (для прототипа она ограничена значениями ε меньше единицы). Кроме того, это позволяет многократно использовать изношенные тормозные шкивы и колодки в сочетании с новыми неизношенными, повышая, тем самым, их долговечность.
Следует отметить, что зависимость исключает случай, когда n равно единице и ε меньше единицы, так как при этом, согласно зависимости, qвпр принимает отрицательные значения. Этот случай соответствует параметрам управляемого усиления прототипа.
Для предлагаемого усилителя предпочтительным является вариант исполнения, при котором тормозной шкив при каждом сателлите и взаимодействующая со шкивом тормозная колодка выполнены каждая из этих деталей в количестве, например, двух, расположенных, например, симметрично по обе стороны вдоль его оси. Это устраняет скручивающие напряжения в водиле и улучшает условия эксплуатации подшипниковых узлов.
Для предохранения предлагаемого фрикционного усилителя от перегрузок на его корпусе установлен жесткий упор, ограничивающий поворот водила в положении, при котором осадка упругих элементов связи тормозных колодок с корпусом соответствует установленному предельному значению момента сил прижима тормозных шкивов к тормозным колодкам относительно оси центрального колеса.
Условия существования предлагаемого усилителя определены исходя из равновесия прижимного устройства во всем диапазоне угловых перемещений водила. Теоретически усилия управления, прилагаемые к водилу, отсутствуют. Однако указанное равновесие неустойчиво, например, из-за изменений условий трения в фрикционных парах (температура, влажность и прочее). Поэтому в задачи, связанные с управлением фрикционным усилителем, входит не только приведение водила в положение, соответствующее заданному режиму работы усилителя, но и удержание в этом положении, несмотря на меняющиеся условия. Для этого в кинематическую цепь связи прижимного устройства с приводом управления включен клиновой механизм, клин которого в продольном направлении упруго связан с корпусом, а в поперечном - является жестким упором, ограничивающим поворот водила в сторону вращения центрального колеса. Составляющая силы прижима жестко связанного с водилом поводка к клину в продольном направлении уравновешивается силой упругой связи клина с корпусом. Составляющая в поперечном направлении перпендикулярна к плоскости прилегания клина к корпусу и создает в этой плоскости силу трения покоя, которая и делает равновесие клина в пределах угла трения ([3], с.50) нечувствительным к изменениям силы прижима поводка к клину, причиной которых являются упомянутые выше изменения условий трения в фрикционных парах усилителя.
Один клин обеспечивает возможность управления фрикционным механизмом только при одном направлении вращении центрального колеса. Для обеспечения возможности управления независимо от направления вращения центрального колеса клиновой механизм включает в себя два жестко связанных между собой клина, расположенных симметрично относительно нейтрального положения жестко связанного с водилом поводка. При вращении центрального колеса в одну сторону поводок контактирует с рабочей поверхностью одного клина, при вращении в другую сторону - другого клина.
Для предохранения фрикционного усилителя с клиновым механизмом от перегрузок продольный ход клиньев ограничен связанным, например, с корпусом жестким упором в положении, соответствующем установленному предельному значению момента сил прижима тормозных шкивов к тормозным колодкам относительно оси центрального колеса.
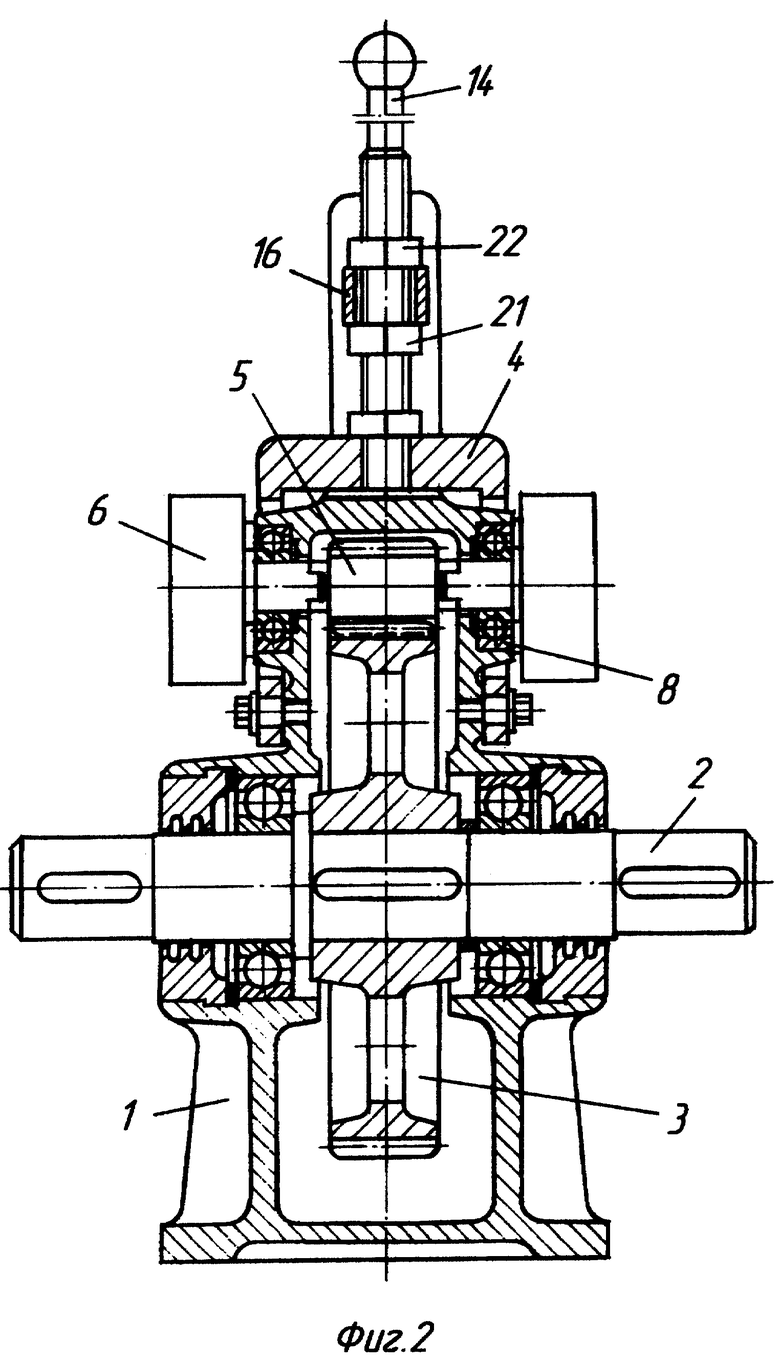
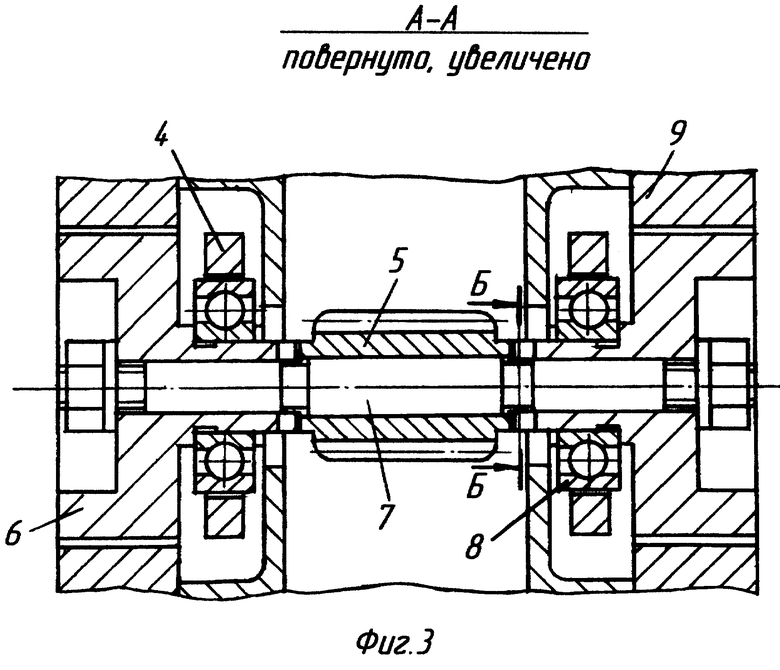
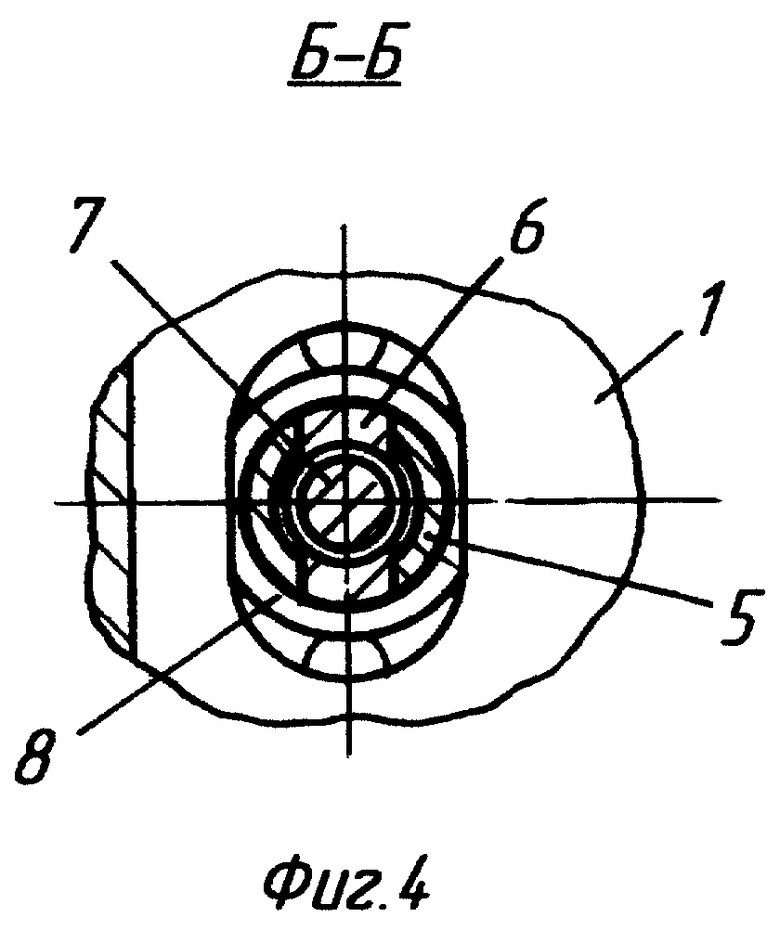
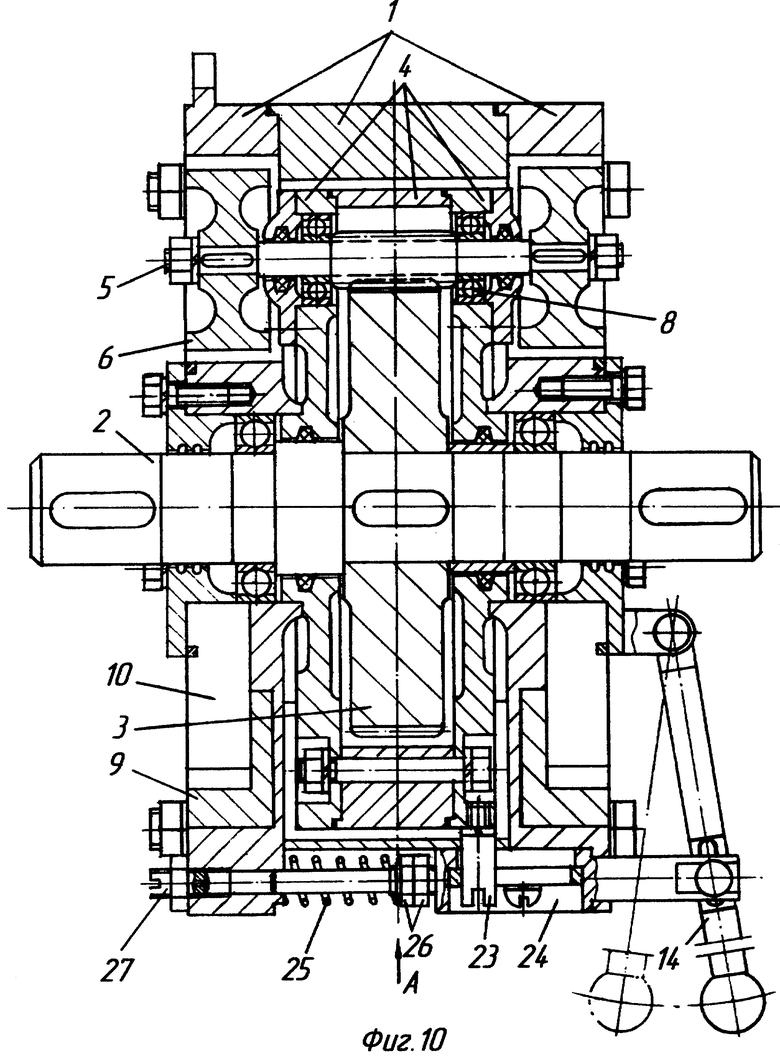
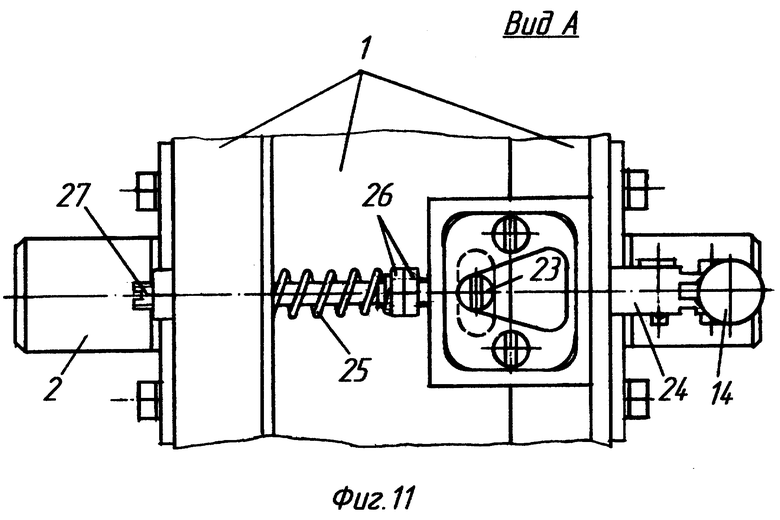
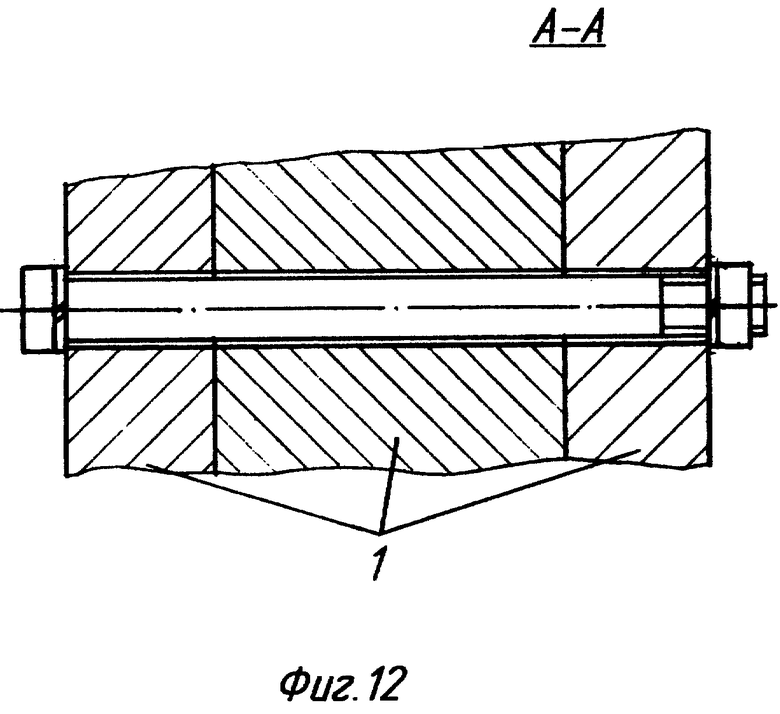
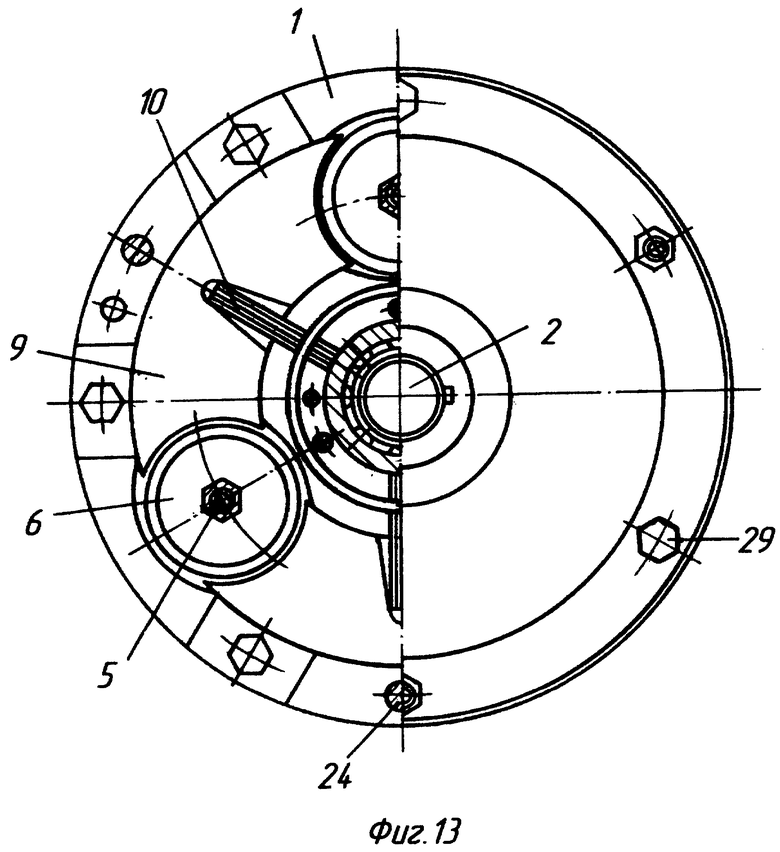
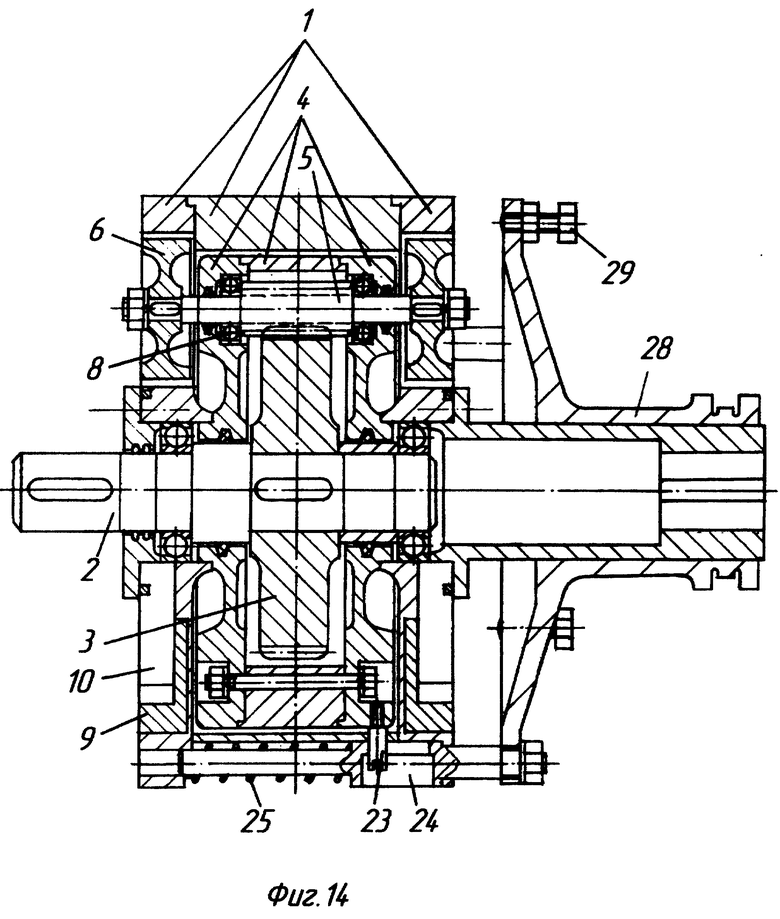
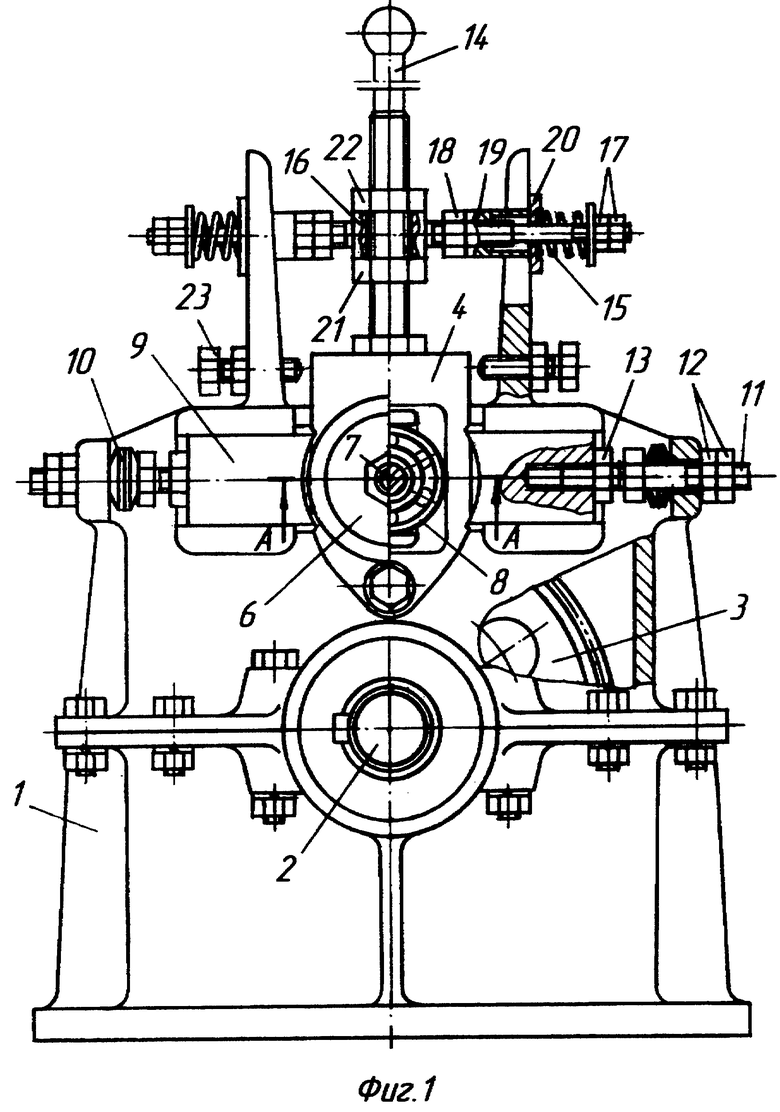
На фиг.1 представлен общий вид тормоза с предлагаемым фрикционным усилителем с одним сателлитом; на фиг.2 - то же в разрезе, вид сбоку; на фиг.3 - разрез по А-А на фиг.1; на фиг.4 - разрез по Б-Б на фиг.3; на фиг.5 - кинематическая схема усилителя, представленного на фиг.1, фиг.2, фиг.3 и фиг.4; на фиг.6 - графики зависимости выходных параметров этого усилителя и коэффициента усиления от положения ручки управления усилителем; на фиг.7 - кинематическая схема усилителя с двумя установленными в одном водило сателлитами; на фиг.8 - кинематическая схема усилителя с клиновым механизмом; на фиг.9 - общий вид усилителя с тремя сателлитами и клиновым механизмом в составе тормоза; на фиг.10 - то же в разрезе, вид сбоку; на фиг.11 - вид А на клиновой механизм на фиг.10; на фиг.12 - разрез по А-А на фиг.9; на фиг.13 - общий вид усилителя с клиновым механизмом в составе управляемой сцепной муфты; на фиг.14 - то же в разрезе, вид сбоку.
На фиг.5, фиг.7 и фиг.8 стрелками показаны направлений вращении центрального колеса и сателлитов и управляющих перемещений клина.
Принятые обозначения.
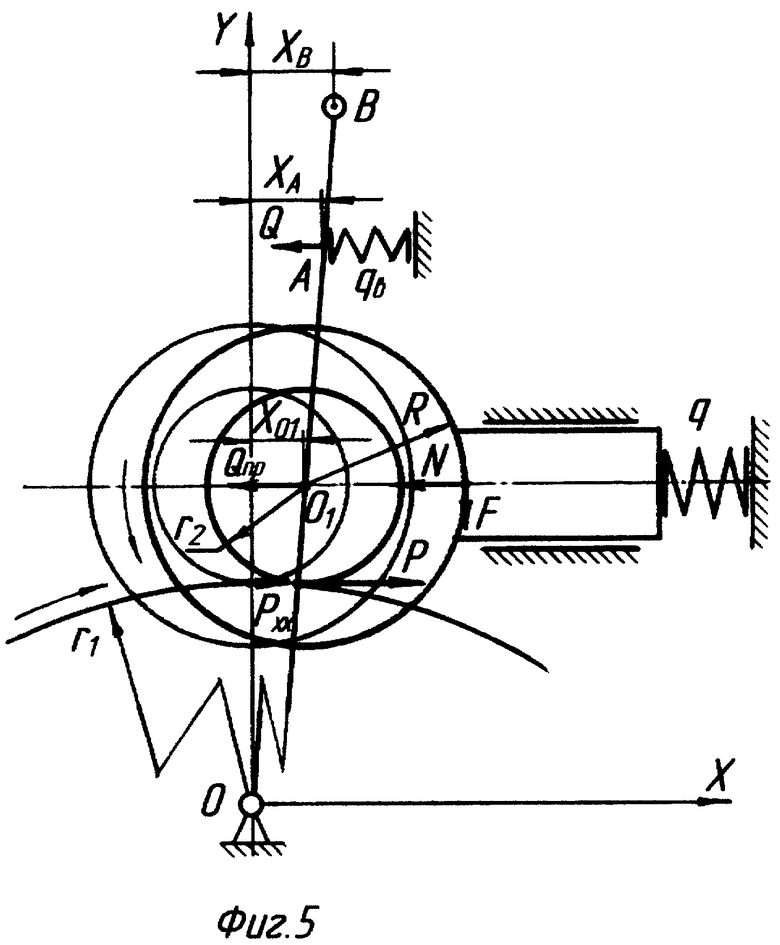
На фиг.5:
Q - сила упругой связи водила с корпусом;
Qпр - та же сила, приведенная к вылету оси вращения сателлита относительно оси вращения водила;
qв - жесткость упругой связи водила с корпусом;
q - жесткость упругой связи тормозной колодки с корпусом;
P - окружная сила в зубчатом зацеплении сателлита с центральным колесом;
PXX - то же при холостом ходе;
N - сила нормального давления тормозного шкива на тормозную колодку;
F - сила трения между фрикционными поверхностями тормозного шкива и тормозной колодки;
r1 - радиус делительной окружности центрального колеса;
r2 - радиус делительной окружности сателлита;
R- радиус фрикционной поверхности тормозного шкива;
ХА - осадка упругого элемента связи водила с корпусом;
XB - отклонение ручки управления в направлении оси ОХ;
Х01 - смещение оси сателлита в направлении оси ОХ, осадка упругого элемента связи тормозной колодки с корпусом.
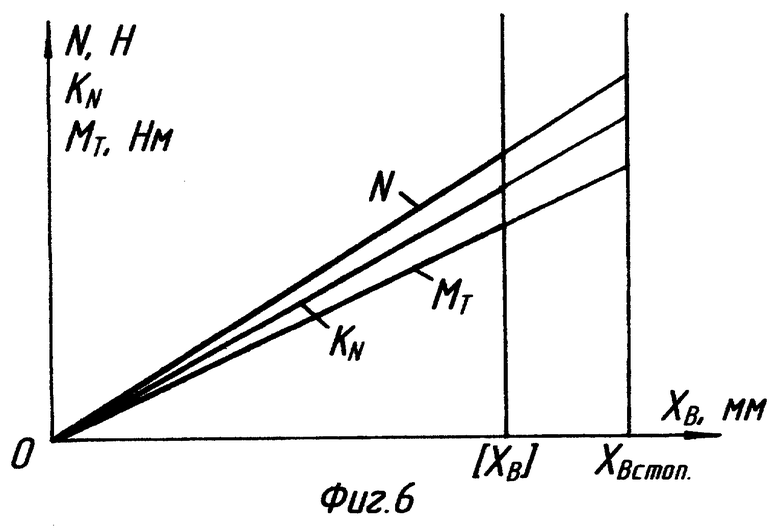
На фиг.6:
МТ - тормозной момент на центральном валу усилителя;
N, XB - то же, что и на фиг.5;
KN - коэффициент усиления;
[XВ] - предельно допустимое отклонение ручки управления;
XВ стоп- отклонение ручки, при котором наступает стопорение. На фиг.7:
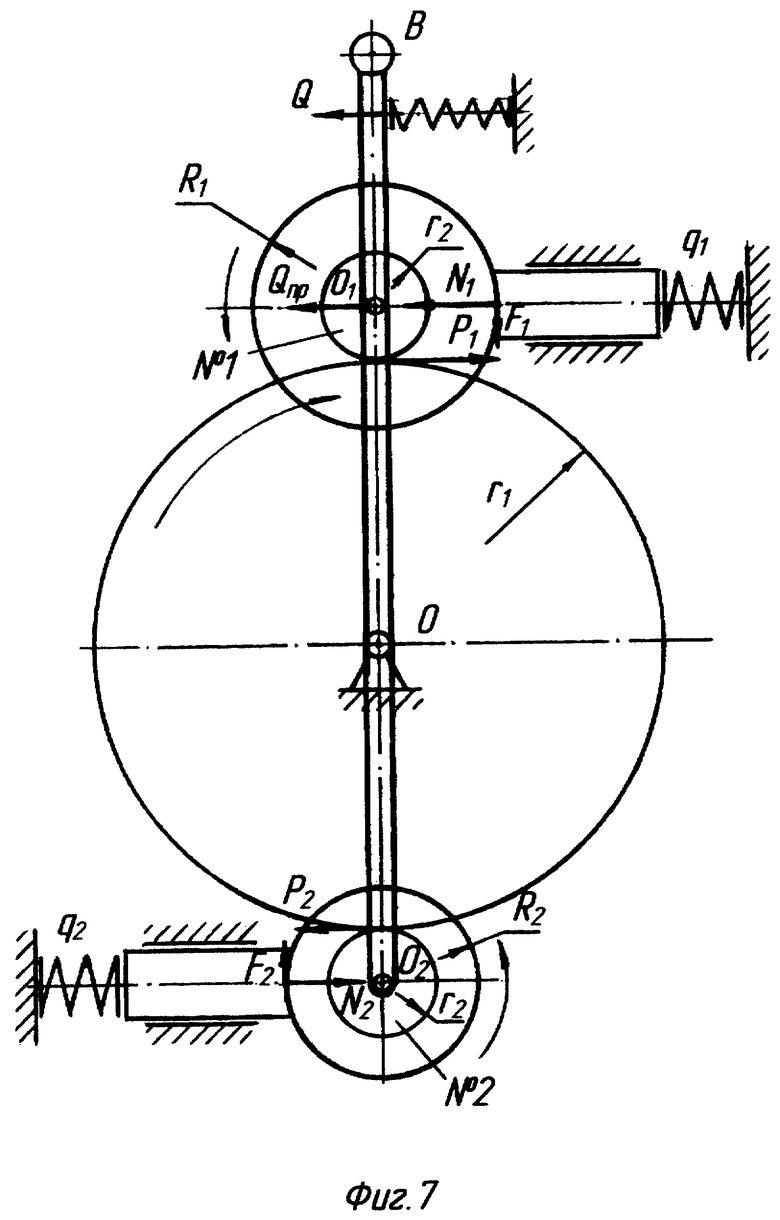
Q, Qпр, r1, r2, qв - то же, что и на фиг.5;
№1 и №2 - нумерация сателлитов;
R1 и R2 - радиусы фрикционных поверхностей тормозных шкивов сателлитов, соответственно №1 и №2;
q1 и q2 - жесткости упругих связей тормозных колодок, взаимодействующих с тормозными шкивами сателлитов, соответственно №1 и №2;
N1, N2, F1 и F2 - силы нормального давления и силы трения в парах трения тормозных колодок о тормозные шкивы сателлитов, соответственно №1 и №2;
P1 и P2 - окружные силы в зубчатых зацеплениях центрального колеса с сателлитами, соответственно №1 и №2.
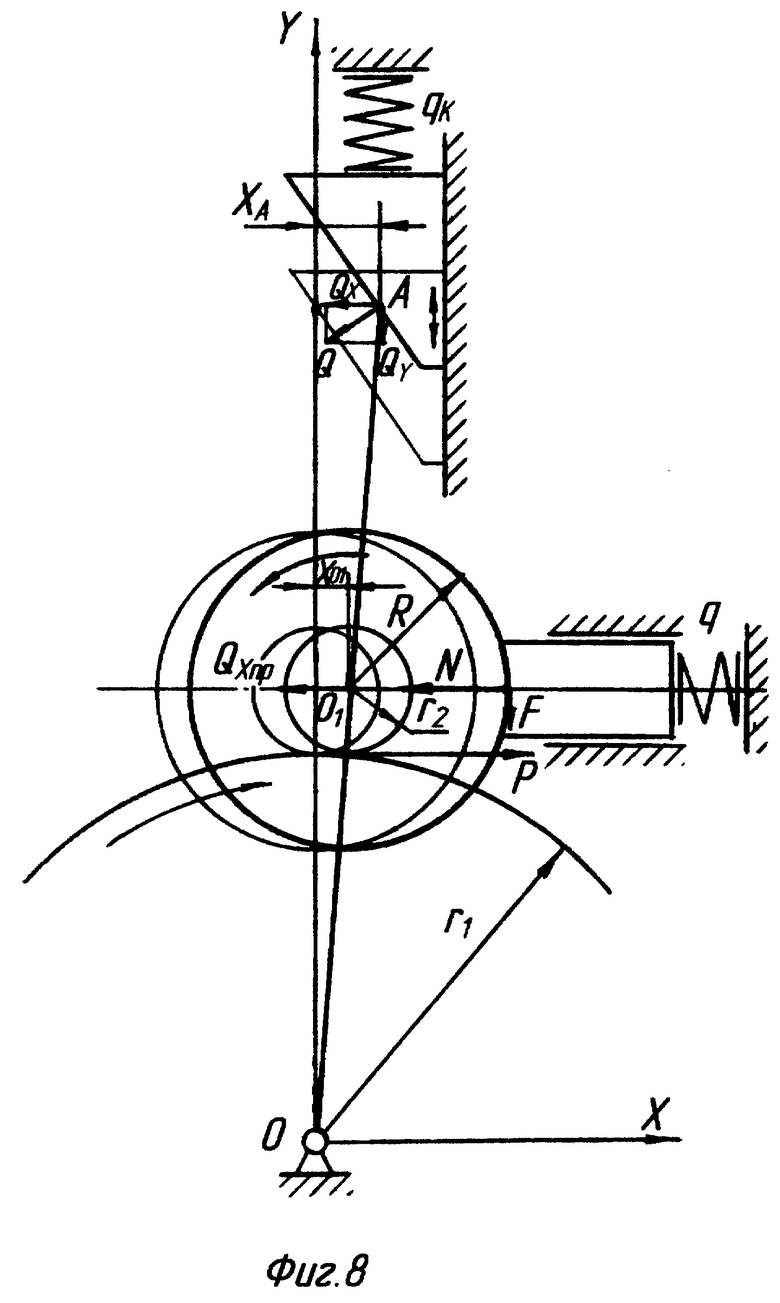
На фиг.8:
ХА, r1, r2, F, N, P и X01 - то же, что и на фиг.5;
Т, TX и ТY - реакция клина на силовые воздействия поводка и ее составляющие - проекции на оси OX и OY;
ТXпр - составляющая силы T по оси ОХ, приведенная к вылету оси вращения сателлита относительно оси вращения водила.
Представленный на фиг.1, фиг.2, фиг.3 и фиг.4 тормоз с предлагаемым фрикционным усилителем состоит из разъемного корпуса 1, установленного в нем на валу 2 центрального колеса 3, смонтированного в выполненном в виде серьги водиле 4 сателлита 5, жестко связанного с двумя симметрично расположенными относительно него в осевом направлении тормозными шкивами 6 с помощью (фиг.3) шпильки 7. Подшипники 8 сателлита 5 располагаются в направляющих пазах корпуса 1 и в окнах водила 4 с возможностью перемещения вдоль этих пазов и окон. В направляющих, выполненных на корпусе 1, размещены тормозные колодки 9, упруго связанные с корпусом 1 посредством упругих элементов 10, выполненных, например, в виде тарельчатых пружин, винтов 11 и настроечных гаек 12 и 13, обеспечивающих возможность выставки зазоров между колодками 9 и шкивами 6, а также предварительных натягов пружин 10. Водило 4 жестко связано с ручкой управления 14, упруго связанной со стойками верхней части корпуса 1 с помощью, например, винтовых пружин 15, винта 16, настроечных гаек 17, 18 и 19, шайб 20. Винт 16 имеет возможность настроечных перемещений вдоль ручки 14 и в пазах стоек верхней части корпуса 1 с помощью гаек 21 и 22. В стойках верхней части корпуса 1 смонтированы с возможностью контакта с водилом 4 регулируемые винтовые упоры 23, ограничивающие поворот водила 4 дальше допустимого, соответствующего предельному значению усилия сжатия тарельчатых пружин 10, которое, в свою очередь, равно предельно допустимому значению силы прижима каждого из тормозных шкивов 6 к тормозным колодкам 9 и соответствует предельно допустимому создаваемому этими силами моменту торможения центрального вала. Отношение радиуса начальной окружности сателлита 5 к радиусу фрикционной поверхности тормозных шкивов 6 меньше или равно коэффициенту трения между тормозными шкивами 6 и колодками 9, то есть  что соответствует значению ε , большему или равному единице (ранее принято, что
что соответствует значению ε , большему или равному единице (ранее принято, что  ).
).
Уменьшение усилий управления достигается выбором qв и q - жесткостей винтовых пружин 15 и тарельчатых пружин 10 в таком соотношении, чтобы выполнялось условие qвпр=q· (ε -1), где обозначения приняты ранее, при этом значение qвпр должно быть равным или больше нуля. Равно нулю это значение может быть при ε , равном единице.
Теоретическое обоснование взаимосвязей параметров предлагаемого усилителя возможно с помощью кинематической схемы, представленной на фиг.5.
Условия равновесия водила и сателлита при отсутствии усилий на ручке управления В:
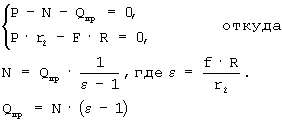
Так как Qпр=qвпр·Х01, а N=q· X01, то с учетом (1)

Так как  а Q=qв·ХА, то с учетом (1) жесткость упругой связи водила с корпусом в месте ее приложения к водилу
а Q=qв·ХА, то с учетом (1) жесткость упругой связи водила с корпусом в месте ее приложения к водилу
Выполнение условий (2) и (3) обеспечивает отсутствие усилий на ручке управления кроме усилий, необходимых для преодоления сил трения в шарнирном соединении водила с корпусом.
В предлагаемом усилителе интенсивность усиления (или коэффициент усиления) зависит не от усилия на входе, а от положения водила. При этом усилие на входе остается постоянным и равно  (значение, приведенное к вылету OO1)
(значение, приведенное к вылету OO1)
Коэффициент усиления
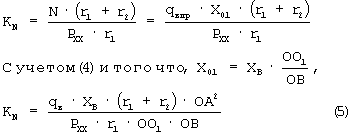
В (5) только ХB - величина переменная, управляемая, отражает положение ручки управления и водила.
На фиг.6 графически иллюстрирован линейный характер зависимости (5) КN=f(XB) и зависимостей N=f(XB) и MT=f(ХB), а именно


На фиг.7 представлена кинематическая схема фрикционного усилителя с двумя установленными в водиле сателлитами. Условие равновесия водила 14 и сателлитов №1 и №2 при отсутствии усилий на ручке управления выражается уравнениями:

f1 и f2 - коэффициенты трения в парах трения тормозных колодок о тормозные шкивы сателлитов, соответственно №1 и №2, и совместно решая (8), (9) и (10), можно установить, что
Qпp·(r1+r2)+N1(r1+r2)-ε 1·N1·(r1+r2)+
+N2·( r1+r2)-ε 2·N2·(r1+r2)=0, откуда
Qпp=N1·(ε 1-1)+N2·(ε 2-1).
А так как оба сателлита установлены в одном водиле и их перемещения равны, то

Подобные зависимости можно вывести для усилителей с любым количеством установленных в одном водиле сателлитов. Для усилителя с количеством сателлитов, равным П, зависимость (11) приобретает вид 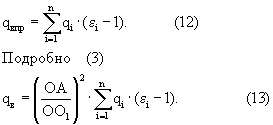
На фиг.8 представлена кинематическая схема предлагаемого усилителя с клиновым механизмом. Угловое положение водила OO1, а следовательно, и коэффициент усиления определяет относительное положение клина и положение жестко связанного с водилом поводка O1A. В продольном направлении ОY клин упруго связан с корпусом. Под действием окружной силы P в зубчатом зацеплении центрального колеса (r1) с сателлитом (r2) водило OO1 поворачивается до контакта поводка O1A с клином. Составляющая TY силы T нормального давления поводка O1A на клиновую поверхность уравновешивается силой упругой связи (qК) клина с корпусом, направленной вдоль клина параллельно оси OY. Составляющая TX жестко замыкается через клин на корпус, создавая давление на поверхность прилегания клина к корпусу.
Управление усилителем осуществляется перемещением клина вдоль оси OY, что приводит к изменению углового положения водила.
С учетом (3) очевидно, что

Также очевидно, что для того чтобы сдвинуть клин, надо приложить усилие большее, чем TX·fn, где fn - коэффициент трения покоя направляющих поверхностей клина и корпуса. Это усилие зависит не только от fn, но и от геометрии клина, длины поводка O1A и других параметров, предоставляя широкие возможности для установления степени нечувствительности усилителя к изменяющимся условиям экспериментально или расчетным путем.
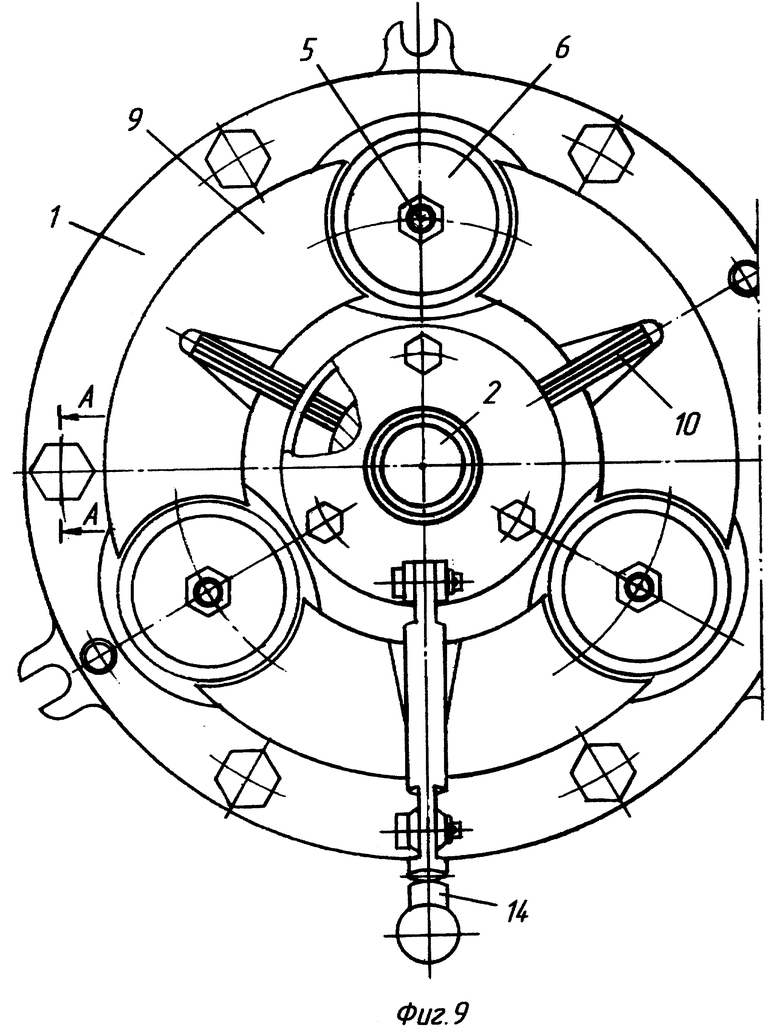
На фиг.9, фиг.10, фиг.11 и фиг.12 в качестве примера промышленной применимости предлагаемого фрикционного усилителя представлен тормоз с тремя сателлитами и клиновым механизмом.
Он состоит из неподвижного корпуса 1, например, с двумя разъемами и проушинами для крепления, установленного в этом корпусе на валу 2 центрального колеса 3, смонтированных в выполненном так же, как и корпус 1 разъемным водило 4 сателлитов 5, например, в количестве трех, каждый из которых жестко связан с двумя тормозными шкивами 6, симметрично расположенными относительно него в осевом направлении. Подшипники 8 сателлитов 5 смонтированы в корпусе водила 4. В направляющих концентрических выточках на торцах корпуса 1, размещены тормозные колодки 9, связанные с этим корпусом посредством упругих элементов 10, выполненных в виде радиально расположенных пакетов пластин ([4], с.303). Один конец каждого из пакетов защемлен в корпусе 1 второй - свободно входит в клиновой паз тормозной колодки 9. Водило 4 жестко связано с поводком 23, установленным с возможностью контакта с клиновыми поверхностями смонтированного в корпусе 1 штока 24, связанного с ручкой управления 14. Шток 24 упруго связан с корпусом 1 посредством пружины 25 и настроечных гаек 26. Жесткость пружины 25 выбрана в соответствии с зависимостью (13), которая с учетом (14), фиг.8, количества сателлитов (n=3), равенства между ними значения ε , которое больше единицы, приобретает вид

где обозначения приняты ранее.
Ход штока 24 ограничен настраиваемым жестким упором 27 в положении, соответствующем предельно допустимому угловому смещению водила 4 от нейтрального положения, то есть максимальной интенсивности торможения.
В нерабочем состоянии усилителя контакт фрикционных поверхностей тормозных шкивов 6 и колодок 9 отсутствует. Ручка управления 14 находится в крайнем правом положении (фиг.10 и фиг.11), в котором ее удерживает усилие предварительного натяга пружины 25, настроенного с помощью гаек 26. Действующий на водило момент, создаваемый окружными силами холостого хода в зубчатых зацеплениях сателлитов 5 с центральным колесом 3, уравновешивается приложенной к поводку 23 реакцией клиновой поверхности штока 24.
При перемещении ручки управления 14 влево клиновая поверхность штока 24 освобождает место для смещения под действием указанных сил холостого хода поводка 23 вместе с водилом 4, которое, меняя свое угловое положение, вводит тормозные шкивы 6 и колодки 9 в фрикционное взаимодействие.
При дальнейшем перемещении ручки 14 водило 4 продолжает поворот в сторону вращения центрального колеса 3. Силы трения и силы нормального давления, возникшие в парах трения фрикционных поверхностей тормозных шкивов 6 и колодок 9, приводят к росту окружных сил в зубчатых зацеплениях сателлитов 5 с центральным колесом 3, что в свою очередь вызывает рост указанных сил трения и сил нормального давления. Действие последних, изгибаясь, воспринимают на себя пакеты пластин упругих элементов 10. Систему уравновешивает реакция клиновой поверхности штока 24 на силовое воздействие поводка 23. Причем в поперечном направлении клиновая поверхность штока 24 служит жестким упором, исключающим дальнейший несанкционированный поворот водила 4, а в продольном - обеспечивает равновесное состояние штока 24 на всей длине его хода. Это достигается выбором соотношения жесткостей упругих связей тормозных колодок 9 и штока 24 с корпусом 1 в соответствии с зависимостью (15).
Очевидно, что количество сателлитов представленного тормоза может быть изменено в любую сторону без ограничений, причем размеры каждого из тормозных шкивов могут быть различными и соответствовать значениям ε , большему, равному или меньшему единице, что значительно расширяет стойкостные возможности и тормозных шкивов, и тормозных колодок. При этом обязательными являются условие превышения нуля значением qвпр и соответствие зависимости (12).
На фиг.13 и фиг.14 представлена управляемая сцепная муфта, в состав которой входит предлагаемый фрикционный усилитель с тремя сателлитами как еще один пример его промышленной применимости. Сам усилитель в муфте конструктивно ничем не отличается от представленного на фиг.9, фиг.10, фиг.11 и фиг.12 в составе тормоза. Отличия касаются самой муфты, а именно подвижности (вращения) ее корпуса и разделения на полумуфты.
Муфта состоит из соосно расположенных ведущей и ведомой полумуфт и прижимного устройства с приводом управления, содержащим клиновой механизм. Ведущую полумуфту составляют ведущий вал 2 с центральным колесом 3, смонтированный в корпусе 1 ведомой полумуфты, которая содержит тормозные колодки 9, упругие элементы 10 и жестко связанный с корпусом выходной вал 26. Прижимное устройство включает в себя водило 4, сателлиты 5, шкивы б, подшипники 8 и поводок 23. Привод управления смонтирован в корпусе 1 ведомой полумуфты и включает в себя клиновой механизм в составе штока 24 и пружины 25 и установленную на выходном валу 26 управляющую втулку 28 с канавкой для управляющей вилки и с винтовыми упорами 29, ограничивающими ход штока 24.
При правом крайнем положении управляющей втулки 28 муфта разомкнута, центральное колесо 3, сателлиты 5 с шкивами 6 вращаются свободно в режиме холостого хода. Контакт тормозных шкивов 6 с тормозными колодками 9 отсутствует, ведомая полумуфта не вращается. При перемещении управляющей втулки 28 влево клиновая поверхность штока 24 освобождает место для перемещения поводка 23 и поворота под действием окружных сил в зацеплениях центрального колеса 3 с сателлитами 5 водила 4 до фрикционного взаимодействия тормозных шкивов 6 с тормозными колодками 9 и вовлечения в вращение ведомой полумуфты силами нормального давления в парах трения шкивов 6 о колодки 9. Интенсивность этого взаимодействия определяется взаимосвязанными между собой положениями управляющей втулки 28, штока 24, поводка 23, водила 4 и осадкой упругих элементов 10. Этим же определяется и величина передаваемого на ведомую полумуфту момента, предельное значение которого устанавливается с помощью упоров 29, предохраняющих муфту от перегрузок.
Кинематика и динамика взаимодействия узлов предлагаемого усилителя в составе рассматриваемой сцепной муфты и в составе тормоза (фиг.9 и фиг.10) одинаковы, что предопределяет его универсальность, в том числе и при использовании его в составе предохранительных и обгонных муфт.
Предлагаемый фрикционный усилитель по своим техническим характеристикам превосходит существующие усилители, применяемые для управления фрикционными механизмами. Есть все предпосылки для его широкого применения в технике. Он органично вписывается в конструкции наиболее ответственных и широко применяемых механизмов: тормозов и муфт различного назначения. Отсутствие громоздких систем управления им предполагает его быстродействие, надежность, низкую материалоемкость и значительную экономию энергии, так как не требует практически никаких затрат энергии, а использует, в том числе и для управления, или передаваемую, или накопленную кинетическую, или потенциальную энергию.
Если принять во внимание количество фрикционных механизмов в каждой машине, будь то станок, транспортное средство или другое устройство, выполняющее механические движения, а также количество машин (одних только автомобилей в год выпускается сотни тысяч), можно говорить об экономии энергии, материалов на сотни миллионов и даже миллиарды рублей.
Незначительные по сравнению с силами трения усилия управления предполагают благоприятные условия для использования фрикционных усилителей со средствами электроавтоматики, программного управления и кибернетики.
Уменьшение веса фрикционных устройств при применении предлагаемого усилителя должно особо заинтересовать конструкторов авиации, плавающей бронетехники, автомобилестроения, железнодорожного транспорта и других отраслей промышленности.
Можно предположить и применение предлагаемого усилителя как самостоятельного фрикционного устройства, например, в лабораторной технике. Можно предвидеть и использование его при разработке конструкций бесступенчатых планетарных зубчатых передач.
Конструкция усилителя создает благоприятные условия для унификации деталей тормозов, муфт и других механизмов, в состав которых он входит.
Использованные источники
1. Александров М.П. и др. Тормозные устройства. Справочник. М.: Машиностроение, 1985.
2. Мазурик Ю.К. Заявка №2001101838/28 (001745) от 22.01.2001. МПК7 F 16 D 41/02. Фрикционный усилитель.
3. Яворский Б.М. и др. Справочник по физике. М.: Физматгиз, 1963.
4 Ицкович Г.М. и др. Курсовое проектирование деталей машин. Учебно-справочное пособие. Изд. 5-е. М.: Машиностроение, 1965.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРИКЦИОННЫЙ УСИЛИТЕЛЬ | 2001 |
|
RU2220339C2 |
| УСТРОЙСТВО ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2008 |
|
RU2392145C1 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1990 |
|
RU2035641C1 |
| ПРИВОД ЦЕНТРОБЕЖНОГО СЕПАРАТОРА | 1992 |
|
RU2033862C1 |
| АВТОМАТИЧЕСКАЯ КОРОБКА ПЕРЕДАЧ ФМВ | 1993 |
|
RU2061600C1 |
| Инерционный трансформатор | 1991 |
|
SU1825927A1 |
| АВТОМАТИЧЕСКИЙ ВАРИАТОР ФМВ | 1995 |
|
RU2088428C1 |
| ДВУХСКОРОСТНОЙ РУЧНОЙ ПРИВОД ТРУБОПРОВОДНОЙ АРМАТУРЫ | 2006 |
|
RU2343329C2 |
| Устройство для регулирования скорости вращения вала дозатора | 1983 |
|
SU1158986A1 |
| Фрикционный вариатор | 1979 |
|
SU848815A1 |
Изобретение относится к области машиностроения и может быть использовано в составе тормозов, управляемых сцепных, предохранительных и обгонных муфт и других механизмов. Фрикционный усилитель содержит корпус, смонтированный в нем планетарный зубчатый механизм в составе жестко связанного с валом центрального колеса, упруго связанного с корпусом водила, и по крайней мере одного сателлита, с которым соосно установлен и жестко связан по крайней мере один тормозной шкив. Водило и сателлит с тормозным шкивом включены в состав выполняющего функцию входа прижимного устройства, а роль выхода выполняет по крайней мере одна упруго связанная с указанным корпусом тормозная колодка с фрикционной поверхностью, расположенной с возможностью создающего момент сопротивления вращению сателлита фрикционного взаимодействия с фрикционной поверхностью тормозного шкива. Все сателлиты с тормозными шкивами установлены на одном водиле и равномерно расположены по периферии центрального колеса. Каждый из тормозных шкивов имеет возможность фрикционного взаимодействия с фрикционной поверхностью одной из упруго связанных с корпусом тормозных колодок, действие на водило силы упругой связи его с корпусом направлено против вращения центрального колеса, а жесткость этой связи, приведенная к вылету оси вращения сателлита относительно оси вращения водила, соответствует зависимости
где  – количество сателлитов,
– количество сателлитов,  – порядковый номер сателлита,
– порядковый номер сателлита,  – жесткость упругой связи тормозной колодки с корпусом,
– жесткость упругой связи тормозной колодки с корпусом,

где  – коэффициент трения фрикционной поверхности тормозного шкива о фрикционную поверхность тормозной колодки, R – радиус фрикционной поверхности тормозного шкива,
– коэффициент трения фрикционной поверхности тормозного шкива о фрикционную поверхность тормозной колодки, R – радиус фрикционной поверхности тормозного шкива,  – радиус делительной окружности сателлита, и является величиной положительной. На каждом сателлите может быть расположено два тормозных шкива, фрикционно взаимодействующих с двумя тормозными колодками, расположенными симметрично по обе стороны вдоль оси сателлита. В кинематическую цепь связи прижимного устройства с приводом управления может быть включен клиновой механизм, клин которого в продольном направлении упруго связан с корпусом, а в поперечном – является жестким упором, ограничивающим поворот водила в сторону вращения центрального колеса. Техническим результатом является исключение сервоприводов, снижение веса и экономия энергии и материалов. 5 з.п. ф-лы, 14 ил.
– радиус делительной окружности сателлита, и является величиной положительной. На каждом сателлите может быть расположено два тормозных шкива, фрикционно взаимодействующих с двумя тормозными колодками, расположенными симметрично по обе стороны вдоль оси сателлита. В кинематическую цепь связи прижимного устройства с приводом управления может быть включен клиновой механизм, клин которого в продольном направлении упруго связан с корпусом, а в поперечном – является жестким упором, ограничивающим поворот водила в сторону вращения центрального колеса. Техническим результатом является исключение сервоприводов, снижение веса и экономия энергии и материалов. 5 з.п. ф-лы, 14 ил.
 , где
, где
 – количество сателлитов,
– количество сателлитов,
 – порядковый номер сателлита,
– порядковый номер сателлита,
 – жесткость упругой связи тормозной колодки с корпусом,
– жесткость упругой связи тормозной колодки с корпусом,
 , где
, где
 – коэффициент трения фрикционной поверхности тормозного шкива о фрикционную поверхность тормозной колодки;
– коэффициент трения фрикционной поверхности тормозного шкива о фрикционную поверхность тормозной колодки;
 – радиус фрикционной поверхности тормозного шкива;
– радиус фрикционной поверхности тормозного шкива;
 – радиус делительной окружности сателлита,
– радиус делительной окружности сателлита,
и является величиной положительной.
| ФРИКЦИОННЫЙ УСИЛИТЕЛЬ | 2001 |
|
RU2220339C2 |
| МЕХАНИЗМ СВОБОДНОГО ХОДА | 1990 |
|
RU2035641C1 |
| ПРОЦЕСС МНОГОСЛОЙНОЙ ПЕЧАТИ | 2013 |
|
RU2629158C2 |
| Механизм для сообщения поршню рабочего цилиндра возвратно-поступательного движения | 1918 |
|
SU1989A1 |
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |

