Изобретение относится к ракетной технике и предназначено для использования в системах наведения телеуправляемых ракет.
Известен способ телеуправления ракетой, включающий измерение координат цели и ракеты, формирование опорной траектории наведения ракеты, определение динамической ошибки наведения ракеты по опорной траектории, формирование линейного рассогласования между ракетой и опорной траекторией, формирование пропорциональной этому рассогласованию команды управления ракетой, корректирование команды управления на величину динамической ошибки наведения по опорной траектории и наведение ракеты на цель по сформированной команде управления ([1], A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. М.: Машиностроение, 1965, с.322-329, 365-371).
В известном способе определенной команде управления соответствует определенная развиваемая нормальная перегрузка ракеты. Максимальная величина команды управления и максимальная нормальная перегрузка, испытываемая ракетой, не должны превосходить некоторых предельно допустимых значений, определяемых соответственно условиями функционирования аппаратуры управления и прочностью ракеты. Данный способ не включает в себя ограничения по командам управления и допустимой перегрузке ракеты и этим определяются его недостатки.
Известен способ управления ракетой, включающий формирование системой управления ракетой команды управления на привод рулей управления ракетой, отклонение рулей управления приводом на соответствующий угол и механическое ограничение угла отклонения рулей до заданного постоянного значения ([1], с.148-150).
Известный способ позволяет обеспечить ограничение максимальных нормальных перегрузок, испытываемых ракетой в процессе наведения, только в узком диапазоне скоростей и высот полета и к тому же механическое ограничение угла отклонения рулей может приводить к возникновению ударных нагрузок на ракету, чем и определяются его недостатки.
Известен способ управления ракетой, включающий формирование системой управления ракетой команды управления на привод рулей управления ракетой, отклонения рулей приводом на соответствующий угол, организацию обратной связи по перегрузке ракеты с использованием датчика нормальных ускорений (перегрузок), корректирование сигнала управления в цепи обратной связи посредством нелинейного преобразования и подачу его на вход привода рулей управления ракетой ([1], с.262-263).
В известном способе посредством ограничения сигнала управления в системе активной стабилизации ракеты ограничивается угол отклонения рулей ракеты и соответственно обеспечивается ограничение развиваемой максимальной нормальной перегрузки ракеты. При этом требуется введение в состав ракеты датчика нормальных ускорений (перегрузок), что усложняет ее конструкцию, снижает надежность, а также может привести к нарушению устойчивости управления ракетой. К тому же этот способ неприменим для класса ракет, в которых отсутствует система активной стабилизации, а их стабилизация осуществляется за счет аэродинамических свойств ракеты. Указанные обстоятельства определяют недостаток данного способа управления.
В качестве прототипа принят способ телеуправления ракетой ([2], патент РФ №2188381), включающий измерение отклонения ракеты относительно опорной траектории, определение оценок отклонения и производной отклонения ракеты относительно опорной траектории, формирование сигнала коррекции по отклонению ракеты относительно опорной траектории пропорционально линейной комбинации оценок отклонения и производной отклонения, вычисление сигнала ускорения ракеты, пропорционального сигналу коррекции, и учет его при определении оценок отклонения и производной отклонения ракеты, формирование сигнала динамической ошибки наведения ракеты при движении по опорной траектории наведения, ограничение сигналов коррекции по отклонению ракеты и формирование суммарной команды управления ракетой с учетом сигнала коррекции и сигнала динамической ошибки наведения ракеты.
В известном способе ограничивается только одна составляющая команды управления - сигнал коррекции отклонения ракеты относительно опорной траектории. Вместе с тем другая составляющая команды управления - сигнал динамической ошибки, определяемый параметрами движения цели и летно-баллистическими характеристиками ракеты и направленный на компенсацию динамической ошибки движения ракеты по опорной траектории, может, особенно при скоростных целях, определить такое значение суммарной команды управления, при котором максимальная развиваемая нормальная перегрузка ракеты будет выходить за допустимые пределы, определяемые ее прочностью.
В таком способе уровень ограничения сигнала управления задается постоянным. Для высокоскоростных ракет, предназначенных для перехвата целей в широких диапазонах скоростей и высот, имеется потребность в переменных уровнях ограничения развиваемой максимальной перегрузки (команды управления), так как их располагаемая перегрузка (маневренность) существенно зависит от текущего времени и условий полета ракеты. Так, для ракет с отделяющимся разгонным двигателем, имеющих два участка траектории - активный и пассивный, с целью обеспечения требуемых максимальных нормальных перегрузок в конце управляемого пассивного участка, ракета должна на начальном участке пассивного полета иметь такую величину располагаемой нормальной перегрузки, которая, как правило, превосходит пределы допустимых значений, определяемых прочностью. При этом сам процесс разделения ракеты из-за возникновения возмущений требует для сохранения прочности ракеты и качества ее вывода на кинематическую (опорную) траекторию наведения еще более глубокого ограничения развиваемой ракетой перегрузки. Поэтому развиваемая нормальная перегрузка ракеты на траектории полета должна иметь разные текущие уровни ограничений по времени полета ракеты.
Кроме того, в этом способе ограничение сигналов управления проводится в каждом канале управления (каналах тангажа и рыскания) независимо друг от друга. Такое ограничение для вращающихся по крену ракет в случае, когда модуль вектора команд в двух каналах управления требует от ракеты развивать нормальную перегрузку, большую по величине, чем располагаемая перегрузка ракеты или перегрузка, определяемая заданным уровнем ограничения, в контуре управления ракетой будет вызывать фазовую ошибку, приводящую к связи каналов управления и, соответственно, к снижению точности наведения ракеты.
Задачей предлагаемого изобретения является повышение динамической точности телеуправления ракетой и расширение границ и условий ее применения.
Поставленная задача решается тем, что в способе телеуправления ракетой, включающем в каналах тангажа и рыскания измерение линейного отклонения ракеты относительно опорной траектории наведения, определение оценок отклонения и производной отклонения ракеты относительно опорной траектории наведения, формирование сигнала коррекции по отклонению ракеты относительно опорной траектории пропорционально линейной комбинации оценок отклонения и производной отклонения, вычисление сигнала ускорения ракеты, пропорционального сигналу коррекции, и учет его при определении оценок отклонения и производной отклонения ракеты, формирование сигнала динамической ошибки наведения ракеты при движении по опорной траектории наведения, формирование команды управления ракетой с учетом сигнала коррекции по отклонению ракеты и сигнала динамической ошибки наведения ракеты и ограничение команды управления ракетой по уровню, новым является то, что формируют заранее, до запуска ракеты, в функции времени полета ракеты пороговое значение допустимой управляющей перегрузки ракеты, а затем, после запуска ракеты, формируют в функции времени полета ракеты текущее значение располагаемой нормальной перегрузки ракеты, определяют по командам управления ракетой в каналах тангажа и рыскания до их ограничения текущую потребную нормальную перегрузку для наведения ракеты на цель, устанавливают текущее значение уровня ограничения развиваемой нормальной перегрузки ракеты как значение, равное наименьшему из текущих значений располагаемой нормальной перегрузки ракеты и порогового значения допустимой управляющей перегрузки ракеты, сравнивают текущее значение потребной нормальной перегрузки ракеты для наведения на цель с текущим уровнем ограничения развиваемой нормальной перегрузки ракеты и при превышении потребной нормальной перегрузки для наведения ракеты на цель уровня ограничения развиваемой нормальной перегрузки команды управления и сигналы ускорения ракеты в каналах тангажа и рыскания преобразуют пропорционально коэффициенту, определяемому как отношение текущего значения уровня ограничения развиваемой нормальной перегрузки ракеты к текущему значению потребной нормальной перегрузки для наведения ракеты на цель.
В предлагаемом способе телеуправления ракетой значение текущей потребной нормальной перегрузки для наведения ракеты на цель Nпотр(t) определяют по соотношению

где Kp(t) - текущее значение программного коэффициента передачи разомкнутого контура управления ракетой;
λFφ(t), λFq(t) - текущие значения сигналов коррекции по отклонению ракеты относительно опорной траектории в каналах тангажа и рыскания соответственно;
λkφ(t), λkq(t) - текущие значения сигналов динамической ошибки наведения ракеты при движении по опорной траектории в каналах тангажа и рыскания соответственно;
g=9.81 м/с2 - ускорение силы тяжести;
t - текущее время полета ракеты.
В предлагаемом способе телеуправления ракетой текущее значение располагаемой нормальной перегрузки ракеты Nрасп(t) определяют по соотношению

где ρ - программное значение плотности воздуха;
Vp(t) - скорость ракеты;
Sм - площадь миделева сечения ракеты;
 - программная производная коэффициента подъемной силы ракеты по углу атаки;
- программная производная коэффициента подъемной силы ракеты по углу атаки;
 - программная производная коэффициента подъемной силы ракеты по углу отклонения рулей;
- программная производная коэффициента подъемной силы ракеты по углу отклонения рулей;
 - программная производная коэффициента продольного момента ракеты по углу атаки;
- программная производная коэффициента продольного момента ракеты по углу атаки;
 - программная производная коэффициента продольного момента ракеты по углу отклонения рулей;
- программная производная коэффициента продольного момента ракеты по углу отклонения рулей;
δmax - максимальное значение угла отклонения рулей ракеты;
P(t) - программное значение силы тяги, развиваемой двигателем ракеты;
mp(t) - программное значение массы ракеты;
g=9.81 м/с2 - ускорение силы тяжести.
Предлагаемый способ телеуправления ракетой поясняется следующим образом. В качестве опорной траектории наведения ракеты может быть использована линия визирования цели или другая кинематическая траектория в соответствии с используемым методом наведения. В процессе сопровождения цели измеряют ее координаты. После запуска ракеты и начала ее управления измеряют координаты ракеты φр и далее с учетом измеренных координат цели и в соответствии с выбранным методом наведения формируют опорную траекторию наведения в виде закона изменения ее угловых координат, например, по соотношению (3) ([1], стр.365) (рассматривается угломестная плоскость наведения с координатой φ)

где φk(t) - угловая координата опорной траектории;
φц(t) - угловая координата цели;
Δφ(t) - угол упреждения.
Затем по измеренным угловым координатам ракеты φр и координатам опорной траектории φk формируют линейное отклонение ракеты относительно опорной траектории наведения h(t)

где rp(t) - дальность до ракеты.
Затем определяют оценки отклонения  и производной отклонения ракеты
и производной отклонения ракеты  посредством фильтрации сигнала линейного отклонения h(t) известным способом, например, в соответствии с алгоритмом калмановской фильтрации ([2], патент РФ №2188381). Далее формируют сигнал коррекции по отклонению ракеты пропорционально линейной комбинации оценок отклонения и производной отклонения, например, по соотношению
посредством фильтрации сигнала линейного отклонения h(t) известным способом, например, в соответствии с алгоритмом калмановской фильтрации ([2], патент РФ №2188381). Далее формируют сигнал коррекции по отклонению ракеты пропорционально линейной комбинации оценок отклонения и производной отклонения, например, по соотношению

где λF(t) - текущее значение сигнала коррекции по отклонению;
,  - оценки отклонения и производной отклонения ракеты;
- оценки отклонения и производной отклонения ракеты;
T(t) - весовой коэффициент, учитывающий производную оценки отклонения ракеты в законе коррекции.
Значения коэффициентов Kp(t) и T(t) определяются при анализе устойчивости и точности замкнутого контура управления ракетой.
Далее вычисляют сигнал ускорения ракеты относительно опорной траектории u(t), пропорциональный сигналу коррекции по отклонению ракеты λF(t). Этот сигнал определяет нормальное ускорение ракеты относительно опорной траектории и учитывается для уменьшения фазового запаздывания при фильтрации сигнала линейного отклонения h(t) при оценке отклонения и производной отклонения. Одновременно с этим по известным кинематическим соотношениям (с учетом параметров движения цели и программных летно-баллистических характеристик) формируют текущее значение сигнала динамической ошибки λK(t) [1, с.394] и путем суммирования его с сигналом коррекции по отклонению λF(t) формируют команду управления ракетой λKφ(t) в канале тангажа (и λKq(t) в канале рыскания).
Текущее пороговое значение допустимой управляющей перегрузки Nпор(t) формируют заранее, до запуска ракеты, исходя из условий стрельбы, условий обеспечения прочности ракеты и эффективности работы системы управления ракетой.
Текущее значение располагаемой нормальной перегрузки ракеты Nрасп(t) формируют в процессе управления ракетой расчетным путем по соотношению (2), которое вытекает из известных выражений ([3], А.А.Лебедев, Л.С.Чернобровкин. Динамика полета беспилотных летательных аппаратов. М.: Оборонгиз, 1962, с.103, 154, 349, 353-354).
Значения программных производных аэродинамических коэффициентов подъемной силы , , продольного момента ракеты , в функции числа Маха (скорости ракеты), программные значения массы ракеты mp(t) и тяги P(t) определяются на этапах проектирования и испытания ракет и хранятся в памяти системы управления ракетой.
Программное значение плотности воздуха ρ соответствует стандартной атмосфере с корректировкой по условиям пуска ракеты (высоте, температуре, давлении) и также хранится в памяти системы управления.
Текущее значение скорости ракеты Vp(t) определяется по измеренным координатам ракеты или задается программным значением как летно-баллистическая характеристика ракеты в функции времени полета ракеты.
В процессе управления ракетой сравнивают текущие значения пороговой допустимой управляющей перегрузки Nпор(f) и располагаемой перегрузки ракеты Nрасп(t) и наименьшее из этих значений принимают за текущее значение уровня ограничения развиваемой перегрузки ракеты Nогр(t), т.е.

По сигналам коррекции по отклонению ракеты и сигналам динамической ошибки наведения в соответствии с соотношением (1) формируют значение текущей потребной нормальной перегрузки Nпотр(t) для движения ракеты по заданной траектории. Сигналы динамической ошибки λkφ(t), λkq(t) определяют потребную перегрузку ракеты для движения по опорной траектории, а сигналы коррекции по отклонению ракеты λFφ(t), λFq(t) - потребную перегрузку ракеты для парирования отклонений ракеты от опорной траектории.
Далее сравнивают потребную перегрузку с текущим уровнем ограничения развиваемой перегрузки ракеты Nогр(t). Если

то текущие сформированные команды управления ракетой λKφ(t), λKq(t) и сигналы ускорения ракеты относительно опорной траектории u(t) в каналах тангажа и рыскания преобразуют пропорционально коэффициенту α(t), который определяется по соотношению
где α(t) - коэффициент преобразования.
Таким образом, если потребная перегрузка для движения ракеты по опорной траектории превышает заданное ограничение, то команды управления в каналах тангажа и рыскания уменьшают пропорционально коэффициенту α(t), т.е.
Скорректированные таким образом команды управления λφ0(t) и λq0(t) поступают на ракету. Ракета, отрабатывая команды управления с учетом текущего ограничения, развивает нормальные перегрузки в каждом канале управления, которые по векторной сумме не превышают допустимых значений, определяемых значением располагаемой перегрузки ракеты или значением пороговой допустимой перегрузки, что обеспечивает сохранение прочностных свойств ракеты. Определение коэффициента преобразования α(t) команд управления с учетом потребных команд управления в каналах тангажа и рыскания, т.е. в плоскости наведения ракеты на цель, обеспечивает устранение фазовых искажений команд управления в области ограничения реализуемой перегрузки ракеты, что сохраняет расчетные запасы устойчивости контура управления и реализацию точности наведения ракеты.
Способ телеуправления ракетой поясняется графическим материалом:
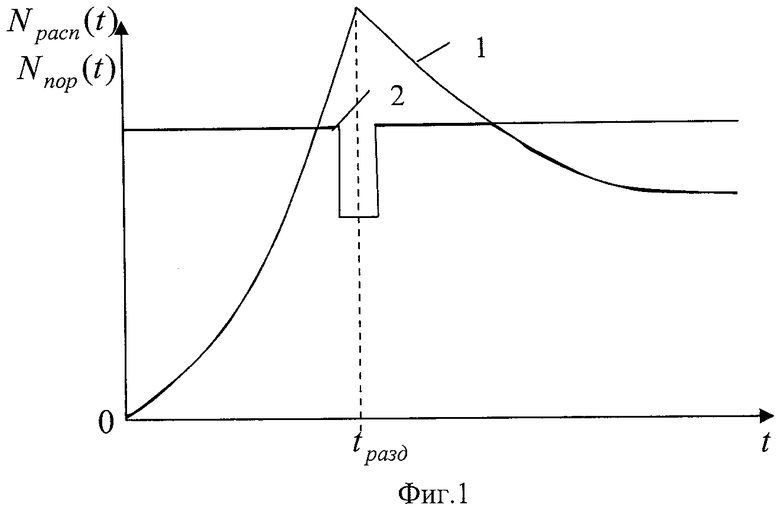
фиг.1 - уровень ограничения развиваемой перегрузки, фиг.2 - структурная схема контура телеуправления ракетой, фиг.3 - структурная схема блока формирования коэффициента преобразования. Пример формирования уровня ограничения развиваемой перегрузки представлен на фиг.1, где обозначено:
1 - располагаемая перегрузка ракеты Nрасп(t);
2 - пороговое значение допустимой перегрузки ракеты Nпор(t);
tразд - время разделения ракеты;
t - текущее время полета ракеты.
Предлагаемый способ управления может быть реализован системой управления, функциональная схема которой приведена на фиг.2, 3.
Система управления ракетой (фиг.2) состоит из пеленгатора цели (ПЦ) 3, пеленгатора ракеты (ПР) 5, блока формирования коэффициента преобразования (ФО) 15, а также содержит в каналах тангажа и рыскания блок формирования сигнала динамической ошибки (ДО) 4, который подключен к первому выходу пеленгатора цели, последовательно соединенные блок формирования линейного отклонения ракеты от опорной траектории наведения (ФЛО) 6, первый вход которого подключен к первому выходу пеленгатора ракеты, а второй вход - к первому выходу пеленгатора цели 3, блок формирования оценок отклонения и производной отклонения (ФОО) 7, блок формирования сигнала коррекции по отклонению ракеты (ФК) 8, второй вход которого соединен со вторым выходом блока 7, причем второй вход блока формирования оценок отклонения и производной отклонения 7 посредством цепи обратной связи, содержащей последовательно включенные блок формирования сигнала ускорения ракеты относительно опорной траектории (ФУ) 14 и второй блок умножения (У2) 13, соединен с выходом блока формирования сигнала коррекции по отклонению ракеты 8, сумматор (С) 9, второй вход которого подключен к выходу блока формирования сигнала динамической ошибки 4, первый блок умножения (У1) 10, устройство передачи команд управления (ПК) 11 и ракету (Р) 12, причем первый и второй входы блока формирования коэффициента преобразования 15 соединены соответственно с выходами сумматоров 9 в каналах тангажа и рыскания, а выход соединен со вторыми входами блоков умножения 10 и 13 в каналах тангажа и рыскания.
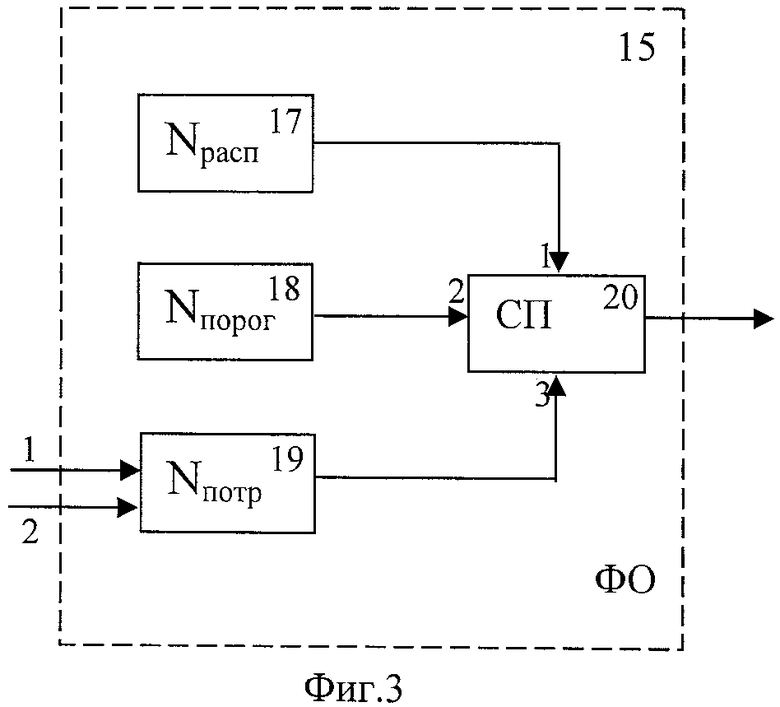
Блок формирования коэффициента преобразования 15 (фиг.3) включает в себя блок формирования текущего значения располагаемой перегрузки ракеты 17, где реализуется соотношение (2), блок формирования текущего порогового значения допустимой управляющей перегрузки 18, блок формирования текущего значения потребной перегрузки для наведения ракеты на цель 19, где реализуется соотношение (1), первый и второй входы которого являются входами блока 15, и блок сравнения значений перегрузок (СП) 20, на первый, второй и третий входы которого подаются текущие значения соответствующих перегрузок, а выход которого является выходом блока 15.
Составляющие элементы системы: пеленгатор цели 3, блок формирования сигнала динамической ошибки 4, пеленгатор ракеты 5, блок формирования линейного отклонения ракеты от опорной траекторией наведения 6, блок формирования оценок отклонения и производной отклонения 7, блок формирования сигнала коррекции по отклонению 8, сумматор 9, блоки умножения 10 и 13 и устройство передачи команд управления 11 - представляют собой известные штатные элементы систем наведения ракет ([1], с.366-372).
Блок формирования коэффициента преобразования 15 представляет собой счетно-решающее устройство и может быть выполнен, например, на базе операционных усилителей ([4], И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987, с.178-186, 221-222).
Система телеуправления ракетой работает следующим образом. Пеленгатор цели 3 осуществляет сопровождение цели и измеряет ее координаты. После запуска ракеты пеленгатор ракеты 3 захватывает на сопровождение ракету и измеряет ее координаты. Далее рассматривается работа системы в одном канале наведения. Измеренные угловые координаты цели и ракеты поступают соответственно на первый и второй входы блока формирования линейного отклонения ракеты от опорной траектории 6, целевая координата поступает также на вход блока формирования сигнала динамической ошибки 4. В блоке 6 формируется сигнал линейного отклонения ракеты, который поступает на вход блока формирования оценок отклонения и производной отклонения 7, где происходит фильтрация сигналов отклонения и производной отклонения с учетом сигнала ускорения ракеты, определяемого в блоке 14 и корректируемого коэффициентом α(t) преобразования команд в блоке 13. Сигналы оценок отклонения и его производной с блока 7 поступают в блок формирования сигнала коррекции по отклонению 8 и далее на первый вход сумматора 9, на второй вход которого поступает сигнал с выхода блока динамической ошибки 4. Полученная таким образом суммарная команда управления поступает с выхода этого блока на первые входы первого блока умножения 10 и блока формирования коэффициента преобразования 15. В блоке 15 происходит формирование текущих значений потребной перегрузки ракеты для наведения на цель и располагаемой перегрузки ракеты, а также текущего порогового значения допустимой управляющей перегрузки (соответственно блоки 17, 18 и 19), которые поступают в блок сравнения 20. Далее в соответствии с результатом сравнения по соотношениям (6) и (7) определяется по выражению (8) коэффициент преобразования α(t), значения которого с выхода блока поступают в блоки 10 и 13 соответствующих каналов управления. Скорректированная на коэффициент преобразования команда управления ракетой (9) устройством передачи команд управления 11 передается на ракету 12. Ракета 12 под действием этой команды развивает перегрузку, не превышающую допустимого значения.
Таким образом, предлагаемый способ наведения телеуправляемой ракетой обеспечивает повышение точности наведения телеуправляемой ракеты и расширение условий применения, что выгодно отличает его от известных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2013 |
|
RU2537124C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280227C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| СПОСОБ ИСПЫТАНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2190184C2 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - расширение функциональных возможностей. Для достижения данного результата до запуска ракеты формируют в функции времени полета ракеты пороговые значения допустимой управляющей перегрузки ракеты. После запуска ракеты формируют в функции времени полета ракеты текущее значение располагаемой перегрузки ракеты, по командам управления ракетой в каналах тангажа и рыскания до их ограничения определяют с учетом программного значения коэффициента передачи разомкнутого контура управления ракетой текущую потребную перегрузку для наведения ракеты на цель. Сравнивают текущее значение располагаемой перегрузки ракеты с текущим пороговым значением допустимой управляющей перегрузки ракеты и с текущим значением допустимой перегрузки и по результатам сравнения определяют коэффициент ограничения, пропорционально которому преобразуют команды управления ракетой в каналах тангажа и рыскания. 2 з.п. ф-лы, 3 ил.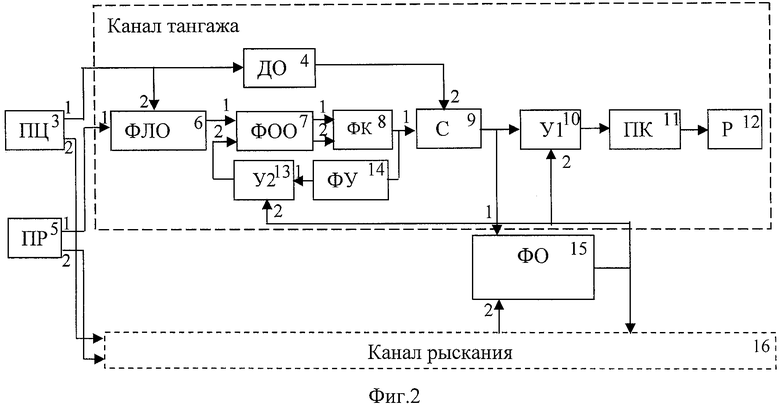
1. Способ телеуправления ракетой, включающий в каналах тангажа и рыскания измерение линейного отклонения ракеты относительно опорной траектории наведения, определение оценок отклонения и производной отклонения ракеты относительно опорной траектории, формирование сигнала коррекции по отклонению ракеты относительно опорной траектории пропорционально линейной комбинации оценок отклонения и производной отклонения, вычисление сигнала ускорения ракеты, пропорционального сигналу коррекции, и учет его при определении оценок отклонения и производной отклонения ракеты, формирование сигнала динамической ошибки наведения ракеты при движении по опорной траектории наведения, формирование команды управления ракетой с учетом сигнала коррекции по отклонению ракеты и сигнала динамической ошибки наведения ракеты и ограничение команды управления ракетой по уровню, отличающийся тем, что формируют заранее, до запуска ракеты, в функции времени полета ракеты пороговое значение допустимой управляющей перегрузки ракеты, а затем после запуска ракеты формируют в функции времени полета ракеты текущее значение располагаемой нормальной перегрузки ракеты, определяют по командам управления ракетой в каналах тангажа и рыскания до их ограничения текущую потребную нормальную перегрузку для наведения ракеты на цель, устанавливают текущее значение уровня ограничения развиваемой нормальной перегрузки ракеты, как значение, равное наименьшему из текущих значений располагаемой нормальной перегрузки ракеты и порогового значения допустимой управляющей перегрузки ракеты, сравнивают текущее значение потребной нормальной перегрузки ракеты для наведения на цель с текущим уровнем ограничения развиваемой нормальной перегрузки ракеты, и при превышении потребной нормальной перегрузки для наведения ракеты на цель уровня ограничения развиваемой нормальной перегрузки команды управления и сигналы ускорения ракеты в каналах тангажа и рыскания преобразуют пропорционально коэффициенту, определяемому как отношение текущего значения уровня ограничения развиваемой нормальной перегрузки ракеты к текущему значению потребной нормальной перегрузки для наведения ракеты на цель.
2. Способ телеуправления ракетой по п.1, отличающийся тем, что значение текущей потребной нормальной перегрузки для наведения ракеты на цель Nпотр(t) определяют по соотношению

где Kp(t) - текущее значение программного коэффициента передачи разомкнутого контура управления ракетой;
λFφ(t), λFq(t) - текущие значения сигналов коррекции по отклонению ракеты относительно опорной траектории в каналах тангажа и рыскания соответственно;
λkφ(t), λFq(t) - текущие значения сигналов динамической ошибки наведения ракеты при движении по опорной траектории в каналах тангажа и рыскания соответственно;
g=9,81 м/с2 - ускорение силы тяжести;
t - текущее время полета ракеты.
3. Способ телеуправления ракетой по п.1, отличающийся тем, что текущее значение располагаемой нормальной перегрузки ракеты Nрасп(t) определяют по соотношению

где ρ - программное значение плотности воздуха;
Vp(t) - скорость ракеты;
Sм - площадь миделева сечения ракеты;
 - программная производная коэффициента подъемной силы ракеты по углу атаки;
- программная производная коэффициента подъемной силы ракеты по углу атаки;
 - программная производная коэффициента подъемной силы ракеты по углу отклонения рулей;
- программная производная коэффициента подъемной силы ракеты по углу отклонения рулей;
 - программная производная коэффициента продольного момента ракеты по углу атаки;
- программная производная коэффициента продольного момента ракеты по углу атаки;
 - программная производная коэффициента продольного момента ракеты по углу отклонения рулей;
- программная производная коэффициента продольного момента ракеты по углу отклонения рулей;
δmax - максимальное значение угла отклонения рулей ракеты;
P(t) - программное значение силы тяги, развиваемой двигателем ракеты;
mp(t) - программное значение массы ракеты;
g=9,81 м/с2 - ускорение силы тяжести.
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| ЛЕБЕДЕВ А.А., КАРАВАНОВ В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| - М.: Машиностроение, 1965, с.148-150, 262, 263, 322-329, 365-371 | |||
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ОРИЕНТИРУЕМОЙ РАКЕТОЙ ПОСРЕДСТВОМ ПРИВОДА, СЛЕДЯЩЕГО ЗА ОРИЕНТАЦИЕЙ ТРАЕКТОРИИ | 2003 |
|
RU2323464C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309446C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |
| МОБИЛЬНАЯ БАЗОВАЯ КОНТРОЛЬНАЯ СТАНЦИЯ ДЛЯ ПОЛУЧЕНИЯ ПАРАМЕТРОВ ТРАЕКТОРНОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И ОЦЕНКИ РАБОТОСПОСОБНОСТИ СИСТЕМ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 2007 |
|
RU2330320C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ РАКЕТЫ ПРИ НАВЕДЕНИИ НА МАНЕВРИРУЮЩУЮ ЦЕЛЬ | 2009 |
|
RU2419057C2 |

