Изобретение относится к ракетной технике и предназначено для использования в комплексах вооружения телеуправляемых ракет.
Известен способ командного телеуправления ракетой, включающий измерение отклонения ракеты относительно расчетной кинематической траектории наведения, формирование команды управления по измеренному отклонению ракеты и производным от отклонения и передачу команды управления на ракету ([1], A.A.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.325-330).
Известный способ управления ракетой обладает недостатками, так как:
- измерение отклонения ракеты от заданной траектории сопровождается флуктуационной (шумовой) ошибкой, а при дифференцировании измеренного отклонения для получения его производных флуктуационная ошибка увеличивается, поскольку команда управления ракетой, формируемая пропорционально отклонению ракеты и производным отклонения, также содержит флуктуационные составляющие, что приводит к увеличению промаха ракеты;
- операции управления "не имеют памяти", поскольку при прерывании процесса измерения отклонения ракеты (при возможных помехах, замираниях и флуктуациях сигнала с пеленгатора ракеты и т.п.) теряется вся информации о движении ракеты, и формирование команды управления ракетой осуществляется уже без учета отклонения ракеты относительно линии наведения, что, в конечном счете, приводит к увеличению промаха или срыву управления.
Наиболее близким к предлагаемому способу является способ командного телеуправления ракетой, включающий пуск ракеты под углом к линии визирования цели (ЛВЦ) и последующий вывод ее на ЛВЦ, измерение отклонения ракеты относительно ЛВЦ, определение оценок отклонения ракеты относительно ЛВЦ и первой производной отклонения, формирование сигнала коррекции пропорционально линейной комбинации оценок отклонения ракеты и первой производной отклонения, вычисление ускорения ракеты, пропорционального сигналу коррекции, и определение текущих оценок отклонения ракеты и первой производной отклонения при прерывании процесса измерения отклонения ракеты с учетом оценок отклонения ракеты и первой производной отклонения, запомненных на момент прерывания процесса измерения отклонения ракеты ([2], Патент РФ №2188381, МПК7 F 41 G 7/26).
В известном способе управления угол пуска ракеты относительно ЛВЦ выбирают исходя из требования обеспечения возможности пеленгации ракеты по критерию незатенения ее линии визирования, например, дымовым шлейфом собственного разгонного двигателя.
Линейное отклонение ракеты относительно ЛВЦ (измеренное отклонение) h определяется по сигналу с пеленгатора по соотношению

где Δε - угловое отклонение ракеты относительно ЛВЦ, измеренное пеленгатором ракеты;
Др(t) - программная (расчетная) дальность до ракеты.
Оценки отклонения  и первой производной отклонения
и первой производной отклонения  ракеты относительно ЛВЦ определяются по формулам
ракеты относительно ЛВЦ определяются по формулам

где U - ускорение ракеты относительно ЛВЦ;
k1, k2 - коэффициенты фильтрации.
Под оценками отклонения ракеты и его производной понимаются сглаженные, отфильтрованные сигналы измеренного относительно ЛВЦ отклонения ракеты h и вычисленной первой производной отклонения, которые в известном способе управления определяются в соответствии с алгоритмом Калмановской фильтрации по соотношениям (2).
Сигнал коррекции контура управления ракетой λF формируется в соответствии с соотношением

где коэффициент передачи К и весовой коэффициент ϕ - параметры закона управления, выбираемые при анализе устойчивости и точности замкнутого контура управления ракетой.
Определение сигнала ускорения ракеты U относительно ЛВЦ осуществляется подачей сигнала коррекции λF на математическую модель, аппроксимирующую движение ракеты под действием этой команды управления λF

где WМ - оператор аппроксимирующей модели ракеты, входом которой является команда управления, а выходом сигнал, пропорциональный ускорению ракеты.
В качестве оператора модели WM может, например, использоваться передаточная функция ракеты как объекта управления в виде

где KV - коэффициент передачи ракеты по ускорению;
Тр - постоянная времени ракеты;
ξр - коэффициент относительного демпфирования.
Учитывая относительно малую инерционность ракеты по сравнению с инерционностью замкнутого контура управления, в качестве аппроксимирующей модели WM ракеты практически можно использовать передаточный коэффициент ракеты по ускорению ([1], А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965, стр.105-113).
При прерываниях процесса измерения отклонения ракеты h коэффициенты фильтрации k1, k2 в соотношении (2) принимаются равными нулю (что эквивалентно бесконечной дисперсии ошибки измерения отклонения) и, с этого момента времени до восстановления процесса измерения отклонения, оценки отклонения ракеты и ее первой производной определяют по формулам

Решение системы (6), с учетом начальных условий на момент прерывания процесса измерения отклонения ракеты, дает на интервале времени прерывания оценки отклонения и его первой производной в виде

где τ - время, отсчитываемое от момента начала прерывания измерения отклонения ракеты h;
 ,
,  - оценки отклонения и первой производной на момент прерывания измерения отклонения ракеты τ=0, т.е. запомненные значения соответствующих оценок.
- оценки отклонения и первой производной на момент прерывания измерения отклонения ракеты τ=0, т.е. запомненные значения соответствующих оценок.
Таким образом, управление ракетой на интервале времени прерывания измерения ее отклонения осуществляется по прогнозируемым (экстраполированным) отклонению ракеты относительно ЛВЦ и первой производной отклонения, которые определяются с учетом значений оценок отклонения ракеты и первой производной отклонения, имевших место (и запомненных) на момент прерывания процесса измерения отклонения ракеты.
Такой способ телеуправления ракетой позволяет повысить точность наведения за счет уменьшения флуктуационной составляющий ошибки посредством фильтрации измеренного отклонения ракеты и его первой производной, а также за счет формирования команды управления ракетой с учетом прогнозированного движения ракеты относительно ЛВЦ при прерываниях процесса измерения отклонения ракеты. Вместе с тем, известный способ обладает и недостатками:
1. Наличие систематической ошибки наведения ракеты, связанной с тем, что при формировании сигнала коррекции используются оценки отклонения и первой производной отклонения , полученные без учета второй производной отклонения (ускорения), что неадекватно отражает действительное возмущенное движение ракеты относительно ЛВЦ, а также с наличием ненулей в системе управления и в ракете, эквивалентных действию возмущения по ускорению.
2. Низкая точность наведения ракеты при прерывании, и особенно длительном, процесса измерения отклонения ракеты. Так как прогнозирование движения ракеты осуществляется экстраполяцией запомненных на момент прерывания измерения отклонения ракеты значений оценок отклонения и первой производной отклонения , определенных без учета ускорения движения ракеты, то точность прогнозирования возмущенного движения ракеты остается низкой. А учитывая, что из-за «устаревания» запомненных значений оценок информативность ретроспективных измерений отклонения ракеты в текущем времени управления уменьшается, то с течением времени при длительных прерываниях точность прогноза еще снижается, что приведет к увеличению промаха или срыву управления.
3. Низкая помехозащищенность управления, приводящая к формированию ложных координат отклонения и команд управления и, соответственно, к уводу ракеты из поля зрения пеленгатора и от ЛВЦ. Так как в поле зрения пеленгатора могут быть помехи искусственного и естественного происхождения с более высокими энергетическими показателями по сравнению с пеленгуемыми источниками излучения на ракете (например, факелом двигательной установки, трассером, радиоответчиком и т.п.), то (особенно при восстановлении процесса измерения отклонения после его прерывания) может происходить захват и сопровождение помехи, т.е. измерение отклонения помехи относительно ЛВЦ, а не ракеты, и, как следствие, формирование ложной команды управления ракетой.
Задачей настоящего изобретения является повышение точности и помехозащищенности наведения телеуправляемой ракеты.
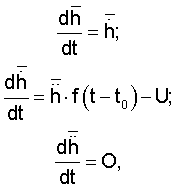
Поставленная задача достигается тем, что в способе командного телеуправления ракетой, включающем пуск ракеты под углом к ЛВЦ и последующий вывод ее на ЛВЦ, измерение отклонения ракеты относительно ЛВЦ, определение оценок отклонения ракеты относительно ЛВЦ и первой производной отклонения, формирование сигнала коррекции пропорционально линейной комбинации оценок отклонения ракеты и первой производной отклонения, вычисление ускорения ракеты относительно ЛВЦ, пропорционального сигналу коррекции, и определение текущих оценок отклонения ракеты и производной отклонения при прерывании процесса измерения отклонения ракеты с учетом оценок отклонения ракеты и первой производной отклонения, запомненных на момент прерывания процесса измерения отклонения ракеты, определяют оценку второй производной отклонения ракеты относительно ЛВЦ, а оценки отклонения ракеты относительно ЛВЦ и первой производной отклонения определяют с учетом оценки второй производной отклонения, формируют пороговую функцию отклонения, как функцию текущего времени управления ракетой, определяют разность между измеренным отклонением ракеты относительно ЛВЦ и оценкой отклонения ракеты, формируют признак "ложная координата" при превышении разности между измеренным отклонением ракеты и оценкой отклонения над значением пороговой функцией отклонения, формируют весовую функцию оценки второй производной отклонения, как функцию времени прерывания измерения отклонения ракеты или времени наличия признака "ложная координата", и при прерывании процесса измерения отклонения ракеты относительно ЛВЦ или при наличии признака "ложная координата" оценки отклонения ракеты относительно ЛВЦ, первой производной отклонения и второй производной отклонения определяют по соотношениям
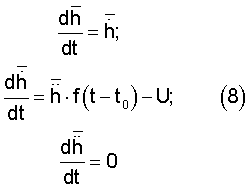
где h - измеренное отклонение ракеты относительно ЛВЦ;
- оценка отклонения ракеты относительно ЛВЦ;
- оценка первой производной отклонения ракеты относительно ЛВЦ;
 - оценка второй производной отклонения ракеты относительно ЛВЦ;
- оценка второй производной отклонения ракеты относительно ЛВЦ;
U - ускорение ракеты относительно ЛВЦ;
f(t-t0) - весовая функция оценки второй производной отклонения ракеты относительно ЛВЦ;
t - текущее время управления ракетой;
t0 - время, соответствующее моменту времени прерывания процесса измерения отклонения ракеты относительно ЛВЦ или моменту времени формирования признака "ложная координата";
 - символ дифференцирования.
- символ дифференцирования.
Введение в способ командного телеуправления ракетой новых операций позволило по сравнению с известным способом повысить точность и помехозащищенность наведения ракеты, особенно при длительных прерываниях процесса измерения отклонения ракеты относительно ЛВЦ.
Управление ракетой предлагаемым способом осуществляется следующим образом. Ракета выстреливается под углом к ЛВЦ и измеряется ее отклонение относительно ЛВЦ h. Далее определяют оценки отклонения ракеты относительно ЛВЦ , первой производной отклонения и второй производной отклонения  по соотношениям
по соотношениям
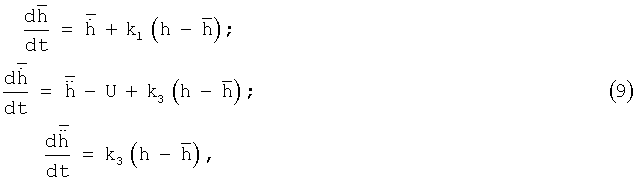
где k1, k2, k3 - коэффициенты фильтрации.
Соотношения (9) представляют собой соотношения фильтра Калмана ([3], К.Брамер, Г.Зифлинг. Фильтр Калмана-Бьюси. - М.: Наука, 1982, стр.68), аналогичные известному виду (1), расширенные для оценки трех фазовых координат ракеты относительно ЛВЦ - отклонения , скорости отклонения и ускорения отклонения . Коэффициенты фильтрации k1, k2, k3 вычисляются в текущем времени управления ракеты по соотношениям, которые применительно к трем оцениваемым координатам имеют вид
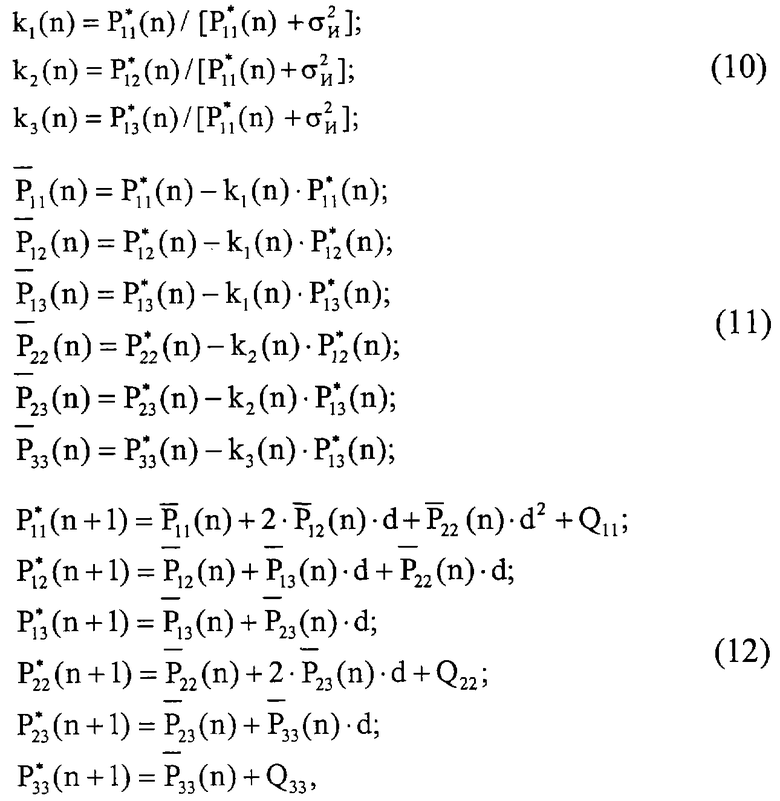
где  - дисперсия ошибки измерения отклонения ракеты относительно ЛВЦ;
- дисперсия ошибки измерения отклонения ракеты относительно ЛВЦ;
 - коэффициенты корреляции ошибок оценивания соответственно отклонения (индекс «1»), первой (индекс «2») и второй (индекс «3») производных отклонения;
- коэффициенты корреляции ошибок оценивания соответственно отклонения (индекс «1»), первой (индекс «2») и второй (индекс «3») производных отклонения;
 - коэффициенты корреляции ошибок экстраполяции соответственно отклонения (индекс «1»), первой (индекс «2») и второй (индекс «3») производных отклонения;
- коэффициенты корреляции ошибок экстраполяции соответственно отклонения (индекс «1»), первой (индекс «2») и второй (индекс «3») производных отклонения;
Q11, Q22, Q23 - дисперсии действующих на ракету возмущений, приведенные соответственно к отклонению, скорости и ускорению ракеты;
d - шаг решения уравнений (10)-(12) по времени;
n - номер такта измерения отклонения ракеты относительно ЛВЦ.
Дисперсия ошибки измерения отклонения ракеты  является априорной величиной, характеризующей точность пеленгатора системы управления, которая определяется предварительно статистически расчетным или экспериментальным путем для данной системы управления ракетой.
является априорной величиной, характеризующей точность пеленгатора системы управления, которая определяется предварительно статистически расчетным или экспериментальным путем для данной системы управления ракетой.
Начальные условия по коэффициентам корреляции для уравнений (10) и дисперсиям возмущений Q11, Q22, Q33 для уравнений (12) являются априорными данными и определяются предварительно расчетным или экспериментальным путем по статистическим характеристикам рассеивания данной ракеты на начальный момент управления.
По полученным оценкам отклонения и производной отклонения в соответствии с соотношением (3) формируют сигнал коррекции λF, который в виде команды управления передается на ракету и одновременно на аппроксимирующую модель ракеты (4). Ракета, отрабатывая команду управления, выводится на ЛВЦ и далее наводится на цель. Сигнал ускорения U, соответствующий движению ракеты, с аппроксимирующей модели ракеты в виде сигнала обратной связи поступает в алгоритм (9) оценки отклонения ракеты относительно ЛВЦ , первой и второй производных отклонения. В силу фильтрующих свойств алгоритма (9), определяемых коэффициентами фильтрации k1, k2, k3, полученные оценки фазовых координат движения ракеты относительно ЛВЦ , , практически не содержат флуктуационных составляющих, а учет при оценке этих координат ускорения движения ракеты практически исключает систематические ошибки оценок отклонения и скорости отклонения , и вследствие этого повышается их точность, а значит, и точность формирования команды управления ракетой и, соответственно, точность наведения ракеты.
В данном способе предварительно формируют пороговую функцию отклонения Δh(t), как функцию текущего времени управления ракетой t, и весовую функцию f(τ) оценки второй производной отклонения , как функцию времени прерывания измерения отклонения ракеты или времени наличия формируемого признака "ложная координата" τ=t-t0, отсчитываемых каждый раз от момента времени прерывания процесса измерения отклонения или момента времени выработки признака "ложная координата" t0.
Пороговая функция отклонения Δh(t) позволяет исключить влияние аномальных выбросов в измеренном отклонении ракеты на формирование оценок отклонения ракеты и его производных. Она определяет уровень допустимого рассогласования измеренного отклонения ракеты относительно ЛВЦ h от прогнозируемой оценки отклонения и характеризует степень достоверности измеренного отклонения ракеты в условиях возможной индикации ложного источника пеленгации (не ракеты). Значение пороговой функции отклонения Δh(t) определяется допустимым при управлении уводом ракеты от линии наведения при заданных значениях поля зрения пеленгатора ракеты и ошибках измерения отклонения ракеты, и на разных участках наведения (например, участок вывода на ЛВЦ или наведение по ЛВЦ) ее численное значение может задаваться в функции текущего времени управления ракетой. Значение пороговой функции может быть определено, например, из соотношения

где σИ - среднеквадратическая ошибка измерения отклонения ракеты относительно ЛВЦ.
Весовая функция f(τ) позволяет корректировать учет оценок отклонения и производных отклонения, запомненных на момент прерывания или недостоверного измерения отклонения ракеты, при экстраполяции оценок отклонения и первой производной отклонения на текущих интервалах времени прерывания или недостоверных измерений. Коррекция прогноза при экстраполяции координат ракеты в условиях отсутствия их измерения позволяет учитывать «старение» (снижения информативности) запомненных для прогнозирования значений оценок отклонения ракеты относительно ЛВЦ , первой и второй производных отклонения по мере удаления текущих моментов времени t от момента начала прерывания измерения или момента начала ложного измерения отклонения ракеты t0.
Весовая функция f(τ) оценки второй производной отклонения определяется импульсной переходной функцией (функцией веса) замкнутого контура управления ракетой, которая связана с его передаточной функцией преобразованием Лапласа. Например, при описании динамики контура управления эквивалентным оператором (дифференциальным уравнением) второго порядка его импульсная переходная характеристика и соответственно весовая функция f(τ) определяются соотношением ([4], В.А.Бесекерский, Е.П.Попов. Теория систем автоматического регулирования. - М.: Наука, 1966, стр.80-82, 107)

где ωс, γс - соответственно собственная частота и коэффициент относительного демпфирования контура управления ракетой.
В общем виде ускорение управляемой ракеты при движении относительно ЛВЦ представляет собой случайный процесс, который может быть описан корреляционной функцией К(τ), определяемой расчетным или экспериментальным путем. В этом случае весовая функция оценки второй производной отклонения f(τ) определяется как импульсная переходная характеристика формирующего фильтра случайного процесса с заданной корреляционной функцией К(τ) ([5], В.В.Быков. Цифровое моделирование в статистической радиотехнике. - М.: Советское радио, 1971, стр.62-127).
На практике, когда отсутствует достаточно точное описание движения ракеты, в качестве весовой функции оценки ускорения, как правило, достаточно использовать функцию экспоненциального взвешивания вида

где Т - постоянная времени замкнутого контура управления ракетой.
При экспоненциальном взвешивании запомненные оценки учитываются с тем меньшим весом, чем дальше текущее время располагается от момента прерывания процесса измерения (или «ложного измерения») отклонения ракеты, поэтому по мере «старения» их влияние на текущие оценки уменьшается.
При прерывании в момент времени t0 процесса измерения отклонения ракеты h и далее до его восстановления оценки отклонения ракеты от ЛВЦ , первой производной отклонения и второй производной отклонения определяют по соотношениям (8), т.е. прогнозируется движение ракеты относительно ЛВЦ с учетом трех фазовых координат (отклонения, скорости и ускорения отклонения), запомненных на момент прерывания процесса измерения отклонения ракеты t0, и с коррекцией их текущих значений в соответствии с весовой функцией f(τ) по мере нарастания интервала времени прерывания измерения отклонения τ=t-t0. Такое прогнозирование координат повышает точность формирования команды управления ракетой при отсутствии измерения координаты и соответственно повышает точность наведения ракеты.
В процессе управления ракетой определяют в текущем времени разность ΔhТ между измеренным отклонением ракеты относительно ЛВЦ h и оценкой отклонения

Далее сравнивают полученную разность ΔhТ с текущим значением пороговой функции отклонения Δh(t). Если разность ΔhТ между измеренным отклонением ракеты h и оценкой отклонения по абсолютной величине превышает абсолютное значение пороговой функцией отклонения Δh(t), т.е.

то формируют признак "ложная координата".
Признак "ложная координата" означает то, что проведенное измерение отклонения ракеты в момент времени t0 имеет аномальный выброс, соответствующий измерению координаты помехи, а не ракеты, поэтому такое измерение отклонения «ложно» и не должно использоваться для формирования команды управления ракетой. В этом случае (т.е. при наличии сформированного признака "ложная координата") оценки отклонения ракеты от ЛВЦ , первой производной отклонения и второй производной отклонения , до момента времени снятия признака "ложная координата" по условию не выполнения соотношения (17), также определяют по соотношениям (8), т.е. прогнозируется движение ракеты относительно ЛВЦ с учетом трех фазовых координат (отклонения, скорости и ускорения отклонения), запомненных на момент выработки признака "ложная координата" t0, и с коррекцией их текущих значений в соответствии с весовой функцией f(τ) по мере нарастания интервала времени наличия признака "ложная координата" τ=t-t0. Такое прогнозирование координат ракеты позволяет повысить точность и помехозащищенность управления ракетой и не допустить срыв наведения ракеты.
Пример функциональной схемы системы управления, реализующий предлагаемый способ командного теленаведения ракеты, приведен на чертеже.
На схеме чертежа обозначено:
П - пеленгатор ракеты;
Л - блок линейных отклонений;
К - блок коррекции;
У - устройство передачи команд управления на ракету;
С - блок сравнения;
εp - угловое отклонение ракеты от ЛВЦ.
Система управления ракетой содержит пеленгатор ракеты 1, блок линейных отклонений 2, блок коррекции 3, устройство передачи команд управления на ракету 4, блок коэффициентов 5, интеграторы 6, 7 и 8, блок модели ракеты 9, сумматоры 10, 11 и 12, блок весовой функции 13, блок пороговой функции 14, блок сравнения 15 и ключи 16, 17.
При сопровождении пеленгатором ракеты, т.е. при наличии измерений отклонения ракеты, пеленгатор формирует команду «Сопр=1», при прерывании процесса измерения отклонения пеленгатор формирует команду «Сопр=0». Эти команды управляют ключами 16 и 17, состояние которых определяет режим оценки отклонения ракеты от ЛВЦ и его производных: соответственно по соотношениям (9) или (8).
Блок сравнения 15 формирует признак «ложной координаты» ракеты: если условие (16) не выполняется, то вырабатывается команда «Ложь=0», т.е. измеренное отклонение ракеты достоверно, в противном случае, при выполнении условия (16), т.е. недостоверном измерении отклонения, вырабатывается команды «Ложь=1». Эти команды также управляют ключами 16 и 17, состояние которых определяет режим оценки отклонения ракеты от ЛВЦ и его производных: соответственно по соотношениям (9) или (8).
Состояние ключей 16 и 17 на чертеже соответствует командам «Сопр=1» и «Ложь=0», т.е. наличию процесса измерения достоверных координат отклонения ракеты относительно ЛВЦ.
Таким образом, предлагаемое техническое решение обеспечивает повышение точности и помехозащищенности наведения телеуправляемой ракеты, что выгодно отличает его от известных способов.
Источники информации
1. А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
2. Патент Российской Федерации №2188381 от 14.02.2000.
3. К.Брамер, Г.Зифлинг. Фильтр Калмана-Бьюсси. - М.: Наука, 1982.
4. В.А.Бесекерский, Е.П.Попов. Теория систем автоматического регулирования. - М.: Наука, 1966.
5. В.В.Быков. Цифровое моделирование в статистической радиотехнике. - М.: Советское радио, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2011 |
|
RU2465535C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260162C1 |
| СПОСОБ КОМБИНИРОВАННОГО НАВЕДЕНИЯ МАЛОГАБАРИТНОЙ РАКЕТЫ С ОТДЕЛЯЕМОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2569046C1 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - повышение точности и помехозащищенности наведения ракеты. Способ командного телеуправления ракетой включает пуск ракеты под углом к линии визирования цели с последующим выводом на нее, измерение отклонения ракеты относительно линии визирования цели, определение оценок отклонения ракеты относительно линии визирования цели и первой производной отклонения, формирование сигнала коррекции, вычисление ускорения ракеты, пропорционального сигналу коррекции, и определение оценок отклонения ракеты и производной отклонения при прерывании процесса измерения отклонения с учетом оценок отклонения и его первой производной, запомненных на момент прерывания измерения отклонения. Новым в способе управления является то, что определяют оценки отклонения ракеты и первой производной отклонения с учетом оценки второй производной отклонения, формируют пороговую функцию отклонения ракеты, определяют разность между измеренным отклонением ракеты и оценкой отклонения ракеты. Формируют признак "ложная координата" при превышении этой разности над пороговой функцией, формируют весовую функцию оценки второй производной отклонения, как функцию времени отсутствия или времени ложного измерения отклонения ракеты, и при прерывании процесса измерения отклонения ракеты или при наличии признака "ложная координата" оценки отклонения, первой и второй производной отклонения определяют по запомненным на момент прерывания процесса измерения оценкам отклонения и его производных с учетом весовой функцию оценки второй производной отклонения. 1 ил.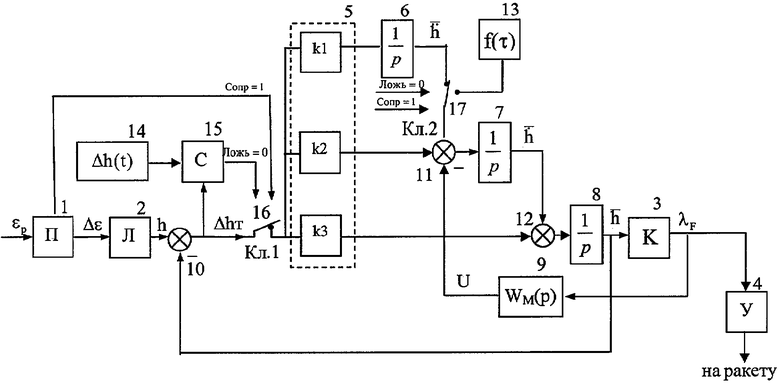
Способ командного телеуправления ракетой, включающий пуск ракеты под углом к линии визирования цели и последующий вывод ее на линию визирования цели, измерение отклонения ракеты относительно линии визирования цели, определение оценок отклонения ракеты относительно линии визирования цели и первой производной отклонения, формирование сигнала коррекции пропорционально линейной комбинации оценок отклонения ракеты и первой производной отклонения, вычисление ускорения ракеты относительно линии визирования цели, пропорционального сигналу коррекции, и определение текущих оценок отклонения ракеты и производной отклонения при прерывании процесса измерения отклонения ракеты с учетом оценок отклонения ракеты и первой производной отклонения, запомненных на момент прерывания процесса измерения отклонения ракеты, отличающийся тем, что определяют оценку второй производной отклонения ракеты относительно линии визирования цели, а оценки отклонения ракеты относительно линии визирования цели и первой производной отклонения определяют с учетом оценки второй производной отклонения, формируют пороговую функцию отклонения как функцию текущего времени управления ракетой, определяют разность между измеренным отклонением ракеты относительно линии визирования цели и оценкой отклонения ракеты, формируют признак "ложная координата" при превышении разности между измеренным отклонением ракеты и оценкой отклонения над пороговой функцией отклонения, формируют весовую функцию оценки второй производной отклонения как функцию времени прерывания процесса измерения отклонения ракеты или времени наличия признака "ложная координата", и при прерывании процесса измерения отклонения ракеты относительно линии визирования цели или при наличии признака "ложная координата" оценки отклонения ракеты относительно линии визирования цели, первой производной отклонения и второй производной отклонения определяют по соотношениям
где h - измеренное отклонение ракеты относительно линии визирования цели;
 - оценка отклонения ракеты относительно линии визирования цели;
- оценка отклонения ракеты относительно линии визирования цели;
 - оценка первой производной отклонения ракеты относительно линии визирования цели;
- оценка первой производной отклонения ракеты относительно линии визирования цели;
 - оценка второй производной отклонения ракеты относительно линии визирования цели;
- оценка второй производной отклонения ракеты относительно линии визирования цели;
U - ускорение ракеты относительно линии визирования цели;
f(t-t0) - весовая функция оценки второй производной отклонения ракеты относительно линии визирования цели;
t - текущее время управления ракетой;
t0 - время, соответствующее моменту времени прерывания процесса измерения отклонения ракеты относительно линии визирования цели или моменту времени формирования признака "ложная координата";
 - символ дифференцирования.
- символ дифференцирования.
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 A, 30.03.1993 | |||
| DE 3034838 C1, 29.11.1990. | |||

