Изобретение относится к области ракетной техники и может быть использовано при проектировании ракет.
Известны способы управления ракетой, основанные на оптическом слежении за ракетой и измерении ее координат по инфракрасным источникам излучения на ракете [1].
Известен способ управления ракетой [2], принятый за прототип. Он основан на следующем: наземной аппаратурой управления с использованием сигнала фотоприемного устройства пеленгатора ракеты по инфракрасному излучению источника на ракете измеряются угловые отклонения ракеты от линии визирования цели. Далее в центральной вычислительной системе (счетно-решающем приборе) угловые отклонения ракеты умножаются на программную дальность до ракеты, предварительно расчетные значения, которой в функции полетного времени хранятся в ее памяти, и получают линейные отклонения ракеты от линии визирования цели, пропорционально которым затем формируют команды управления ракетой, подаваемые через радиолокационный тракт на борт ракеты.
Недостатком такого способа является то, что при управлении ракетой не измеряется дальность до ракеты, а используется программная дальность, которая при стрельбе по подвижной цели, особенно в конце маршевого участка наведения, может отличаться на значительную величину от реальной дальности, что приведет к снижению точности наведения и, возможно, нарушению управления ракетой.
Задачей данного предлагаемого изобретения является повышение точности наведения ракеты на цель.
Поставленная задача достигается тем, что в способе управления на маршевом участке полета ракетой с отделяемым двигателем и бортовым источником излучения с использованием сигнала фотоприемного устройства пеленгатора ракеты, включающем измерение угловых отклонений ракеты от линии визирования цели, формирование команд управления ракетой пропорционально линейным отклонениям ракеты, определяемым по угловым отклонениям ракеты от линии визирования цели и дальности до ракеты, определяют предварительно силу света бортового источника излучения до прохождения в атмосфере и дальность до ракеты в момент отделения двигателя, измеряют освещенность фотоприемного устройства пеленгатора ракеты в момент отделения двигателя и его текущую освещенность на маршевом участке полета ракеты, а для формирования команд управления ракетой используют текущую дальность до ракеты, которую определяют из зависимости:
где Д - текущая дальность до ракеты;
Е - текущая освещенность фотоприемного устройства пеленгатора;
J0 - сила света бортового источника излучения до прохождения атмосферы;
Ер - освещенность фотоприемного устройства в момент отделения двигателя ракеты;
Др - дальность до ракеты в момент отделения двигателя.
В зависимости (1) символ "е" обозначает трансцендентное число е=2,71828. .., символ "ln ()" - натуральный логарифм с основанием е.
Предлагаемый способ за счет использования сигнала фотоприемного устройства пеленгатора ракеты, пеленгующего источник инфракрасного излучения на ракете, позволяет получить текущую дальность до ракеты на маршевом участке полета и тем самым повысить точность ее наведения на цель.
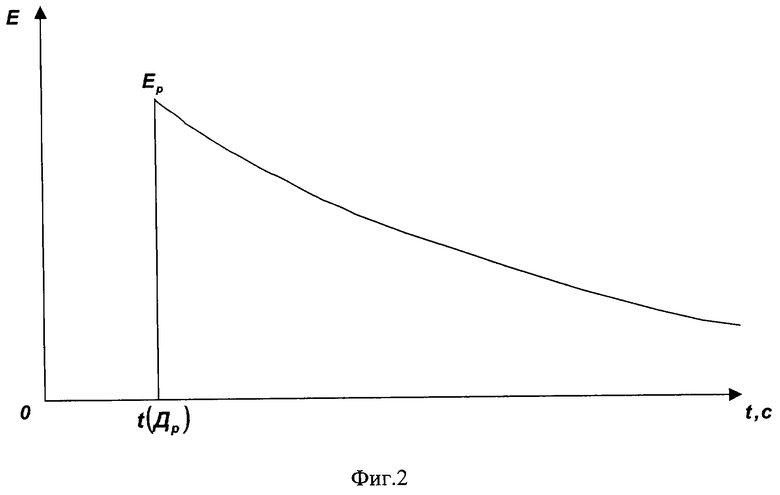
Предлагаемое изобретение поясняется фиг. 1 и 2. На фиг. 1 приведена траектория движения ракеты: на стартовом участке, т.е. на участке полета ракеты с отделяемым разгонным двигателем, и на маршевом участке - участке полета без разгонного двигателя. На фиг. 1 обозначено: 1 - ракета; 2 - отделившийся двигатель; 3 - угловой сектор пространства (луч) пеленгации первого (широкого) канала пеленгатора ракеты, который измеряет координаты ракеты по излучению факела разгонного двигателя; 4 - наземная аппаратура управления; 5 - линия визирования цели; 6 - угловой сектор пространства (луч) второго (узкого) канала пеленгатора ракеты, который измеряет координаты ракеты по бортовому источнику излучения на ракете; 7 - источник инфракрасного излучения на ракете; 8 - маршевая ступень ракеты. На фигуре 2 представлена зависимость изменения текущего сигнала освещенности Е фотоприемного устройства пеленгатора в функции времени t от источника излучения на ракете, где Ер - освещенность фотоприемного устройства пеленгатора ракеты в момент tp отделения двигателя ракеты на дальности Др.
Способ управления ракетой на маршевом участке полета осуществляется следующим образом: после запуска ракета (1) с разгонным двигателем встреливается в луч (3) первого канала пеленгатора наземной аппаратуры управления (4). С момента начала времени управления ракета (1) на стартовом участке управляется относительно линии визирования цели (5) по измеренным координатам факела двигателя. По окончании работы разгонный двигатель (2) отделяется от маршевой ступени ракеты, второй канал пеленгатора (6) захватывает на сопровождение источник излучения (7) маршевой ступени (8) ракеты и в пеленгаторе наземной аппаратуры управления (4) измеряется текущий сигнал освещенности фотоприемного устройства от источника излучения на ракете с последующим использованием его для выделения угловых отклонений ракеты от линии визирования цели и формирования команд управления ракетой на маршевом участке.
В момент отделения двигателя (разделения ракеты) измеряется по регистрации сигнала фотоприемного устройства пеленгатора его освещенность Ер. Соответствующая программная дальность отделения двигателя Др определяется предварительно расчетным или экспериментальным путем. Сила света J0 источника излучения маршевой ступени ракеты до прохождения атмосферы определяется заранее в лабораторных условиях (без учета затухания при прохождении атмосферы). Текущая освещенность Е - определяется текущим сигналом с фотоприемного устройства. По известным величинам Е, J0, Ер, Др в соответствии с соотношением (1) определяется текущая дальность до ракеты Д.
Далее полученная дальность Д используется при определении линейных отклонений ракеты от линии визирования цели и вычислении команд управления, подаваемых на борт ракеты. Использование при формировании команд управления измеренной реальной дальности до ракеты позволяет увеличить точность вычисления команд управления, передаваемых на борт ракеты, улучшить процесс управления, а значит и точность наведения ракеты на цель.
Источники информации
1. Ф.К.Неупокоев. Стрельба зенитными ракетами. - М.: Военное издательство, 1991 г. (стр. 62-64).
2. Зенитные ракетные комплексы ПВО сухопутных войск. Техника и вооружение, 5- 6, 1999 г. (стр. 69).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ КОМАНДНОГО ТЕЛЕУПРАВЛЕНИЯ РАКЕТОЙ | 2000 |
|
RU2188381C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2263874C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2004 |
|
RU2280232C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2241195C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2009 |
|
RU2406067C1 |
| ЗЕНИТНАЯ УПРАВЛЯЕМАЯ РАКЕТА | 2000 |
|
RU2167390C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
Изобретение относится к ракетной технике и может быть использовано при проектировании ракет. Угловые отклонения ракеты от линии визирования цели измеряют и формируют команды управления ракетой пропорционально ее линейным отклонениям, определяемым по угловым отклонениям ракеты от линии визирования цели и дальности до ракеты. Предварительно определяют силу света бортового источника излучения до прохождения в атмосфере и дальность до ракеты в момент отделения двигателя. Измеряют освещенность фотоприемного устройства пеленгатора ракеты в момент отделения двигателя и его текущую освещенность на маршевом участке полета ракеты. Для формирования команд управления ракетой используют текущую дальность до ракеты, которую определяют из некоторой зависимости. Способ позволяет повысить точность наведения ракеты на цель. 2 ил.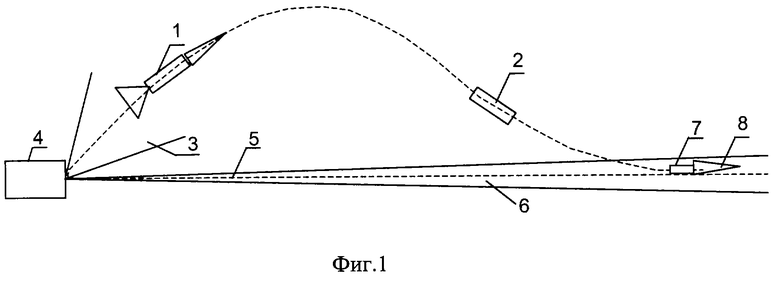
Способ управления на маршевом участке полета ракетой с отделяемым двигателем и бортовым источником излучения с использованием сигнала фотоприемного устройства пеленгатора ракеты, включающий измерение угловых отклонений ракеты от линии визирования цели, формирование команд управления ракетой пропорционально линейным отклонениям ракеты, определяемым по угловым отклонениям ракеты от линии визирования цели и дальности до ракеты, отличающийся тем, что определяют предварительно силу света бортового источника излучения до прохождения в атмосфере и дальность до ракеты в момент отделения двигателя, измеряют освещенность фотоприемного устройства пеленгатора ракеты в момент отделения двигателя и его текущую освещенность на маршевом участке полета ракеты, а для формирования команд управления ракетой используют текущую дальность до ракеты, которую определяют из зависимости
где Д - текущая дальность до ракеты;
Е - текущая освещенность фотоприемного устройства пеленгатора;
J0 - сила света бортового источника излучения до прохождения в атмосфере;
Ер - освещенность фотоприемного устройства в момент отделения двигателя ракеты;
Др - дальность до ракеты в момент отделения двигателя.
| Зенитные ракетные комплексы ПВО сухопутных войск | |||
| Техника и вооружение, №5-№6, 1999, с | |||
| Способ приготовления пищевого продукта сливкообразной консистенции | 1917 |
|
SU69A1 |
| НЕУПОКОЕВ Ф.К | |||
| Стрельба зенитными ракетами | |||
| - М.: Военное издательство, 1991, с.62-64 | |||
| СПОСОБ НАЗЕМНОГО ИЛИ НАДВОДНОГО СТАРТА РАКЕТЫ С СИСТЕМОЙ УПРАВЛЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2096721C1 |
| ТРАНСПОРТНО-ПУСКОВОЙ КОНТЕЙНЕР РАКЕТЫ | 1994 |
|
RU2090820C1 |
| US 4455917, 26.06.1984. | |||

