Изобретение относится к безрельсовым транспортным средствам, в частности к точечным шагающим движителям. Преимущественная область использования изобретения - транспортные средства повышенной проходимости, робототехника, устройства для передвижения инвалидных и грузовых колясок по ступенькам лестниц и выступам.
Широко известны колесные движители, содержащие колеса на осях, сочлененные рессорами с рамой транспортного средства, имеющие большие сопротивления движению от просаживания колеи весом машины при накате на опорную площадь и практическую непроходимость по заснеженной местности.
Известен шагающий движитель, содержащий установленные с каждой стороны корпуса по два удлиненных опорных шагающих элемента, каждый из которых связан своими концами со смещением по фазе на 180° относительно друг друга шейками кривошипов коленчатых валов, которые установлены в корпусе с помощью горизонтальных и вертикальных упругих связей, выполненных в виде предварительно направляющих пружин, взаимодействующих с подшипниками коренных шеек коленчатого вала и корпусом (см. RU, патент №2001817, кл. B62D 57/032, 1993).
Существенным недостатком его являются прокладка сплошной колеи при движении и сложность осуществления компенсации колебаний движения.
Известен шагающий движитель, содержащий вертикально четыре пяты, срединами установленные с упругой связью в виде плоских пружин шарнирно по концам двуплечих рычагов, последние установлены шарнирно с упругой связью в виде пружин средней частью по концам двуплечего рычага со ступицей в средней части, сочлененной с ведущим валом или осью машины (см. RU №2104164, кл. B60B 15/20).
Известна машина Локхид, движитель которой содержит три рычага, установленных под углом 120° друг к другу. Движители установлены по сторонам ходовой части. На мягких грунтах рычаги вращаются так, что каждый трехколесный узел действует как одно колесо, оборудованное большими цилиндрическими грунтозацепами.
Другой аналог - движитель содержит четыре рычага, на концах рычагов установлены стопы или колеса.
Еще аналог. Движитель может быть выполнен в виде равнобедренного треугольника с колесами, размещенными на углах, приводимыми во вращение одновременно с треугольником, соединенным с корпусом ручной тележки осью вращения, расположенной эксцентрично относительно геометрического центра треугольника.
Указанные аналоги не обеспечивают плавности хода (постоянство величины клиренса) ходовой части в шагающем режиме при движении по твердому ровному грунту. Следствием чего является нагружение элементов конструкции динамическими толчками при шагании при сопротивлении движению по опорной площади.
Другим направлением повышения проходимости является использование движителей, поочередно перекатывающихся друг через друга. Так, известен колесно-шагающий движитель транспортного средства, содержащий колесо, основной рычаг, установленный поворотно в корпусе транспортного средства привод вращения рычага и колеса, кинематическую передачу, расположенную в основном рычаге, состоящую из солнечной шестерни с паразитной шестерней, сателлита и блока переменного сцепления солнечной шестерни с корпусом и с основным рычагом, при этом в основном рычаге установлена вторая паразитная шестерня с сателлитом, развернутая вокруг оси колеса относительно первой шестерни на 180°, колесо состоит из двух сегментов, снабженных дополнительными рычагами с расположенными в них дополнительными кинематическими передачами, ведомые звенья которых жестко соединены своими осями с сегментами, ведущие жестко соединены с основным рычагом соосно с осями сателлитов, а дополнительные рычаги жестко установлены на осях последних. В колесно-шагающем режиме один из сегментов, контактирующий с грунтом, перекатывается по нему, а другой ускоренно перемещается над поверхностью грунта до соприкосновения с ним. В этот момент оба сегмента находятся друг от друга на расстоянии, равном шагу. Корпус транспортного средства за это время переместится на величину, равную половине шага. Далее сегмент, который до этого находился в контакте с грунтом, отрывается от него и перемещается аналогично тому, как было описано выше.
Недостатком известного решения является малая высота преодолеваемых препятствий, не превышающих величины радиуса сегмента.
Наиболее близким аналогом-прототипом можно считать колесно-шаговый движитель, патент №2038248. Данный прототип содержит ступицу колеса, пары рычагов, сочлененные с опорными пятами. С корпусами шарниров, расположенных по периферии граней ступицы, сочлененной с осью или валом машины, через указанные пары рычагов, сочлененных шарнирами, шарнирно сочленены опорные пяты. В полости корпусов шарниров установлены предварительно напряженные резиновые подушки, входящие в контакт с опорой рычага. В свободном положении пяты расположены перпендикулярно осям рычагов под действием сил предварительного напряжения подушек. При вращении колеса впереди идущая пятка пяты касается опорной площади, прогибая силой веса движителя на подушках сочленения рычагов относительно их осей и создавая реактивную силу, направленную в сторону движения относительно опорной площади при переводе веса движителя на впереди идущую пяту.
Недостатками данного прототипа являются - низкий клиренс, а также многозвенность и сложность конструкции, и, как следствие, низкая надежность и невысокая скорость передвижения.
Технические задачи, решаемые изобретением: плавное точечное шагание по опорной поверхности, упрощение конструкции движителя за счет оригинальных технических решений, повышение клиренса без существенно увеличения радиуса колесно-шаговых движителей. А также решение таких попутных задач, как перемещение по воде и по лестничным маршам.
Достигаемый технический результат - повышение надежности и скорости передвижения, повышение проходимости за счет повышения клиренса. Кроме того, упрощение конструкции движителя позволяет использовать в качестве опор герметичные объемные тела для возможности перемещения транспортного средства на данном шасси по воде.
Технический результат достигается тем, что шасси транспортного средства для передвижения по различным опорным поверхностям содержит колесно-шаговые движители. Каждый колесно-шаговые движитель состоит по меньшей мере из трех опор, закрепленных на общем валу симметрично относительно оси вращения вала и наклонно друг к другу, образуя боковые ребра воображаемой пирамиды. При этом вал расположен под углом к опорной поверхности таким образом, чтобы опорной поверхности касались не более двух опор от каждого колесно-шагового движителя одновременно. Причем вал закреплен подвижно с возможностью поперечных движений и кинематически связан с компенсатором колебаний. Компенсатор колебаний закреплен на шасси.
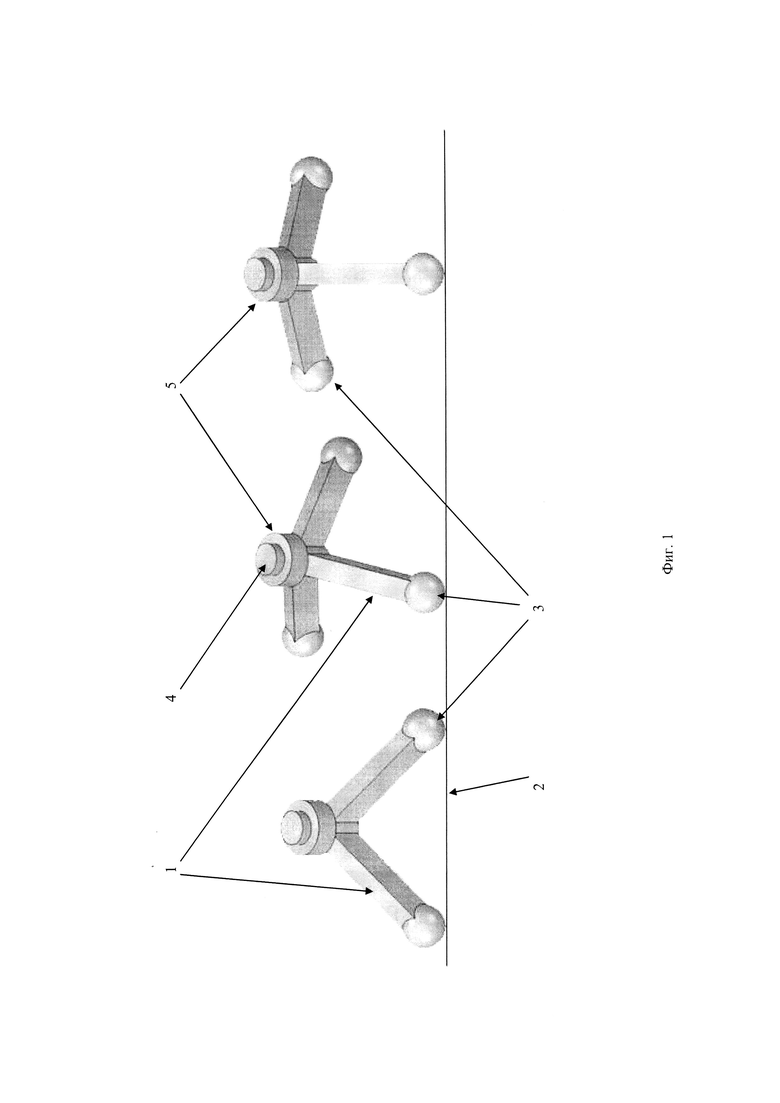
На фиг. 1 показан колесно-шаговый движитель, вид сбоку, в разных положениях опор 1 относительно опорной поверхности 2. На конце каждой опоры находится сферическая пята 3. Опоры 1 сходятся на общем валу 4, который вращается в ступице 5. Вид сбоку означает, что изображенные колесно-шаговые движители при вращении вала 4 движутся влево либо вправо, в зависимости от направления вращения.
В другом варианте опоры 1 могут быть закреплены на ступице, вращающейся на валу, что ни как не меняет сущности изобретения.
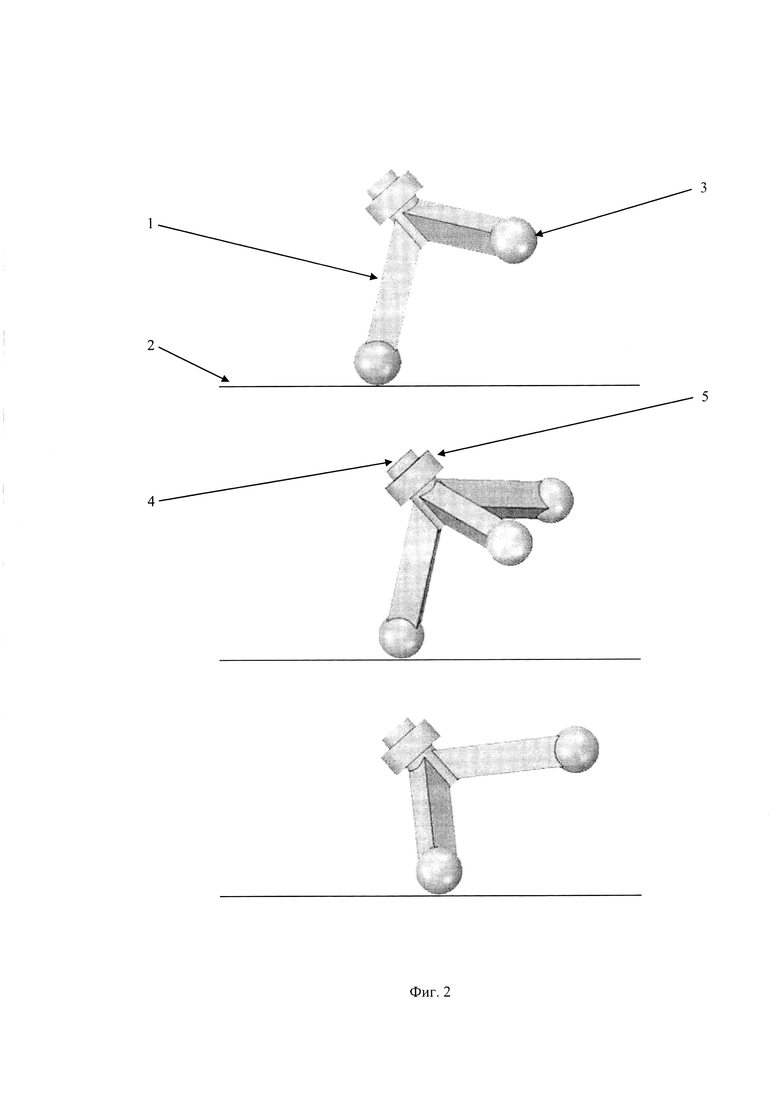
На фиг. 2 показан тот же колесно-шаговый движитель видом спереди в разных положениях опор 1 относительно опорной поверхности 2.
Наиболее оптимальное количество опор равно трем, угол между опорами 1 равен 90 градусам, а угол между каждой опорой 1 и осью вращения вала 4 равен значению arccos(1/√3). В частных случаях возможны иные варианты количества опор и углов между ними, что никак не меняет сущности изобретения.
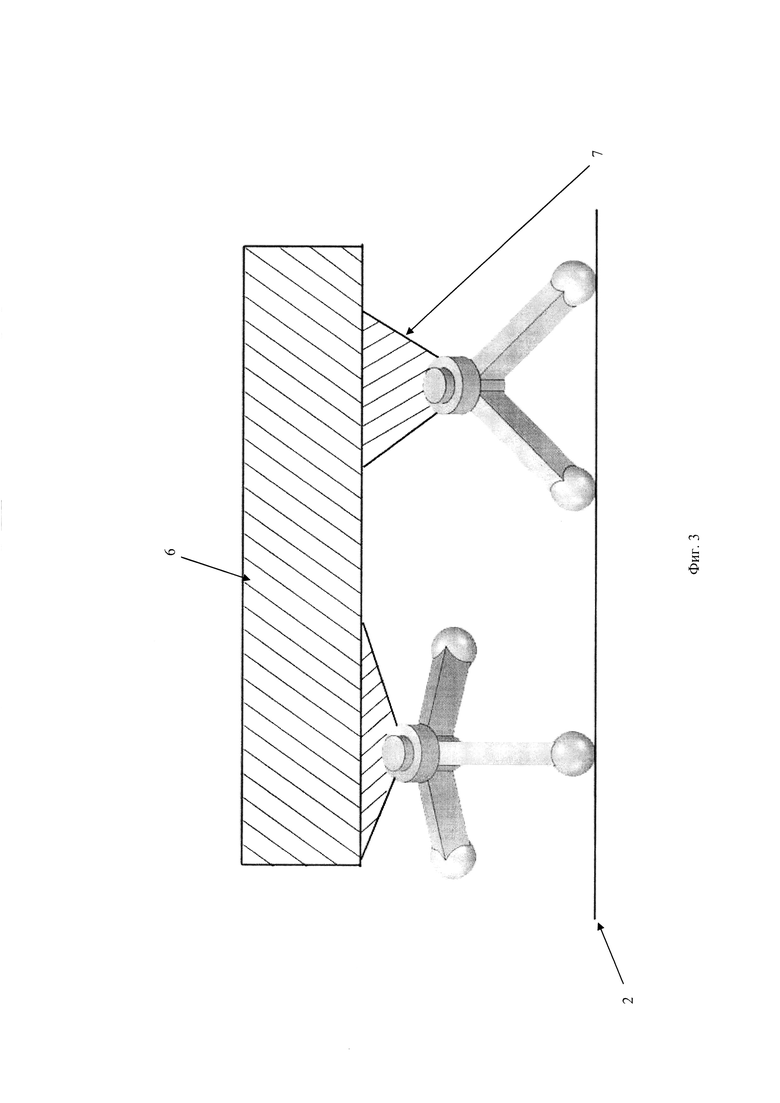
На фиг. 3 показано шасси 6, с колесно-шаговыми движителями, закрепленными к шасси 6 через компенсаторы колебаний 7. Как видно, компенсаторы колебаний 7 позволяют автоматически регулировать высоту вала 4 при различных положениях опор 1.
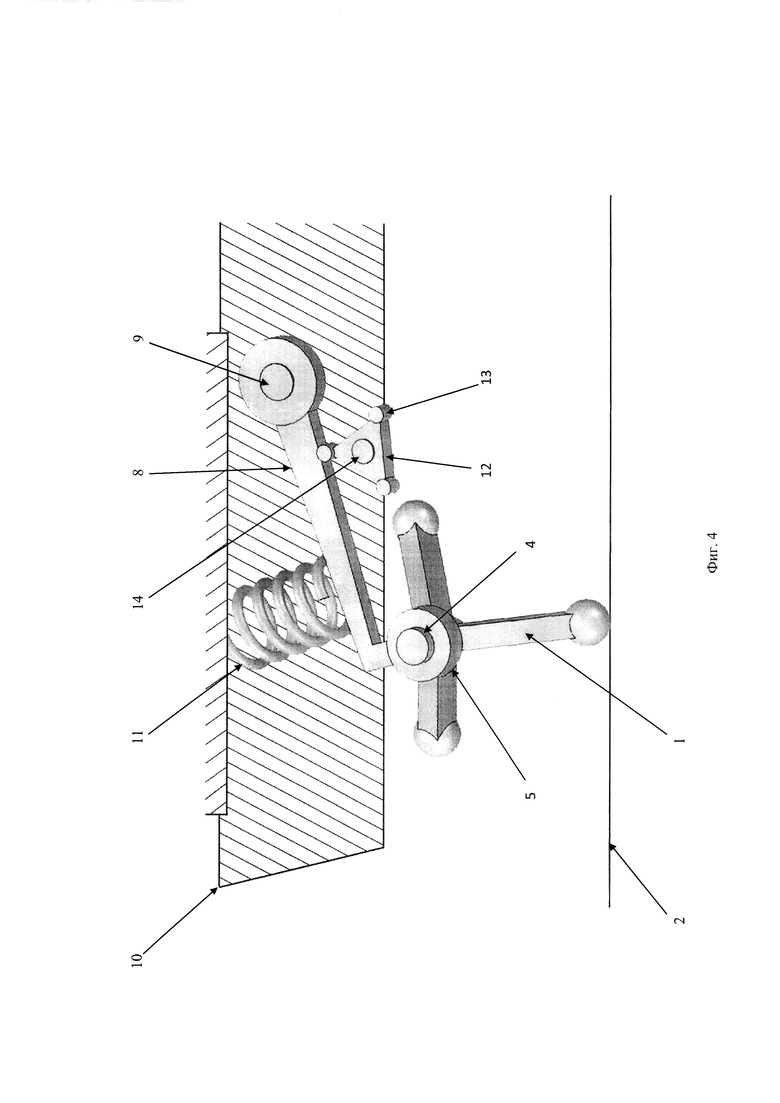
На фиг. 4 показан вариант компенсатора колебаний в сборе с колесно-шаговым движителем. Компенсатор колебаний состоит из рычага 8, качающегося на неподвижной оси 9, закрепленной на раме 10 шасси. На свободном конце рычага 8 закреплена ступица 5, в которой на валу 4 вращаются опоры 1. Сверху на рычаг 8 действует возвратная пружина 11, а снизу на рычаг 8 действует кулачковый механизм 12, состоящий из трех роликов 13 и вращающийся на валу 14, проходящему через раму 10 шасси. Вал 4 и кулачковый механизм 12 приводятся во вращение от общего привода и вращаются синхронно с одинаковой частотой, что позволяет полностью сгладить колебания вала 4. Кулачковый механизм с помощью роликов 13 поднимает рычаг 8 вверх, а возвратная пружина 11 опускает рычаг 8 вниз.
В другом варианте кулачковый механизм в компенсаторе колебаний заменен на два кривошипно-шатунных механизма, работающих в противофазе и кинематически связанных с приводом колесно-шагового движителя.
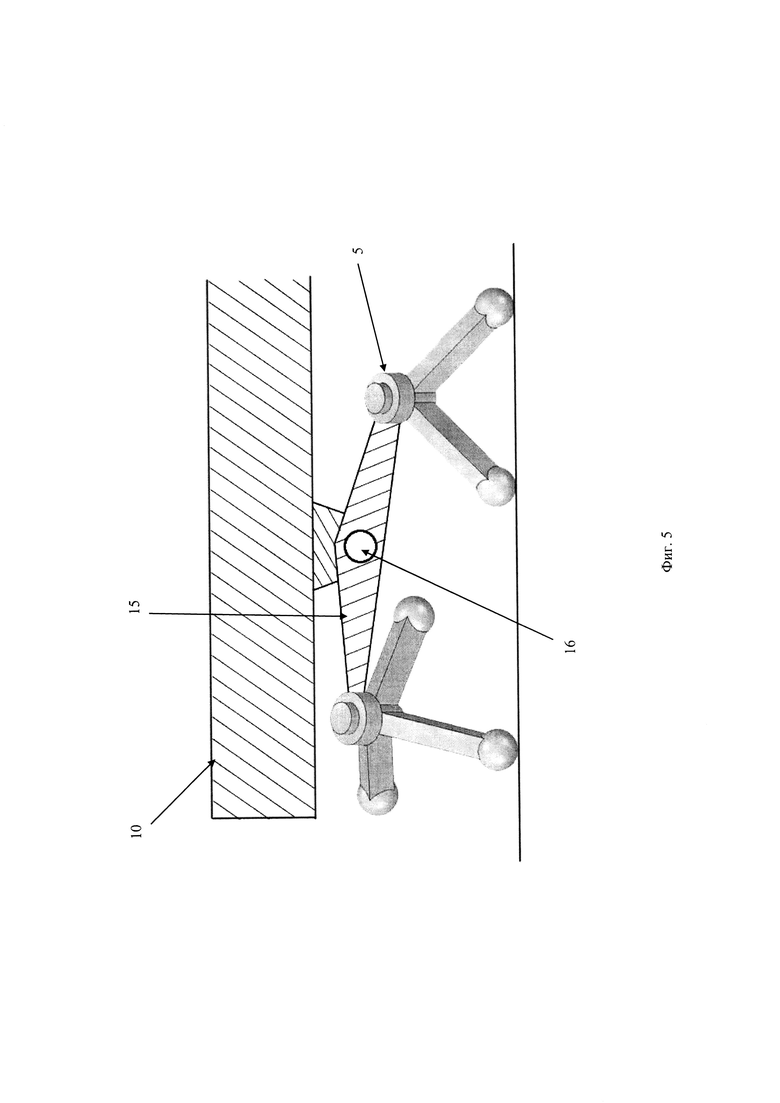
На фиг. 5 показан третий вариант компенсатора колебаний. При использовании четного количества колесно-шаговых движителей, каждая пара имеет общий компенсатор колебаний, который состоит из общего рычага 15, качающегося на неподвижной оси 16, закрепленной на раме 10 шасси. В этом случае, в каждой паре колесно-шаговых движителей валы приводятся в синхронное вращение от общего привода, а опоры на данных валах устанавливают в противофазе.
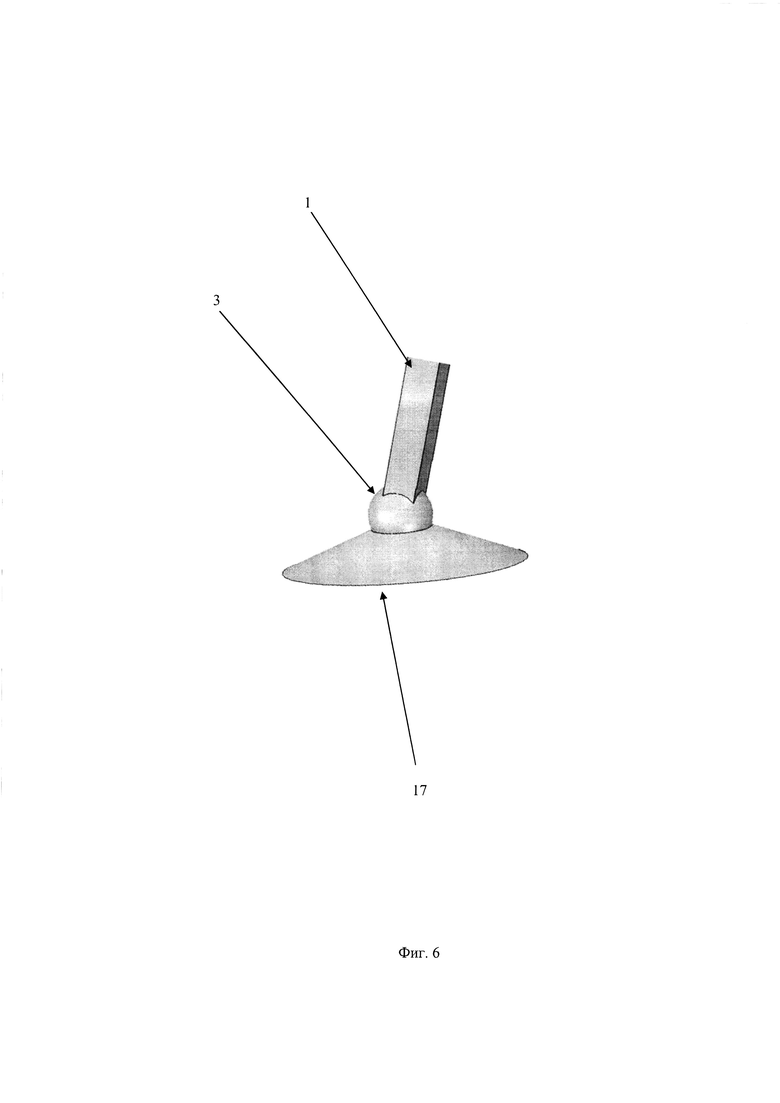
На фиг. 6 показан вариант колесно-шагового движителя с опорными башмаками 17, надетыми на сферические пяты 3 опор 1. В общем случае башмак 17 свободно вращается на сферической пяте 3. В некоторых случаях, например, если на шасси установлен только один колесно-шаговый движитель, между башмаком 17 и опорой 1 находится управляемый механизм вращения, например электродвигатель с редуктором. Он служит для маневрирования. Если шасси требуется повернуть, то данный механизм вращения поворачивает опору 1 и все шасси с ней в нужное направление, при этом башмак 17 неподвижно находится на опорной поверхности. Поворачивание осуществляется когда опорной поверхности касается только один башмак 17. При использовании на шасси только одного колесно-шагового движителя, для обеспечения устойчивости, на шасси устанавливается силовой гироскоп. А устойчивое положение шасси в неподвижном состоянии обеспечивается за счет дополнительного механизма поворота вала 4 относительно рамы 10 шасси в такое положение, при котором все три опоры 1 касаются опорной поверхности 2.
В остальных случаях маневрирование осуществляется за счет поворачивания самих колесно-шаговых движителей. Поворачивание колесно-шагового движителя осуществляется только тогда, когда опорной поверхности касается одна опора данного колесно-шагового движителя. При использовании на шасси трех или более колесно-шаговых движителей, для возможности маневрирования используют механизм, приводящий в одновременное и синхронное поворачивание в общей плоскости одновременно всех колесно-шаговых движителей, при условии что в данный момент каждый из них касается опорной поверхности только одной опорой. При этом сами колесно-шаговые движители работают синхронно. Такой способ маневрирования позволяет разворачиваться вплоть до 360 градусов. Если на опорах используются башмаки 17, то башмаки, которые в момент маневрирования находятся на опорной поверхности - неподвижны на ней, а опоры свободно вращаются сферической пятой 3 в башмаках 17.
Для перемещения шасси по водным опорным поверхностям, опоры 1 могут быть выполнены в виде герметичных объемных тел. В этом случае транспортное средство сможет перемещаться по воде точно также, как и по суше.
А для перемещения шасси по лестничным маршам различного размера опоры выполнены с возможностью изменения своей длины. В этом случае каждая опора выполнена в виде управляемого телескопического механизма выдвижения. Оператор либо автоматика транспортного средства определяет с помощью приборов размеры ступеней лестничного марша - высоту и глубину, и под эти размеры подстраивает длину опор 1, таким образом, чтобы с каждым шагом башмак 17 вставал примерно на середину ступеньки. В случае использования таких телескопических опор, компенсатор колебаний может быть выполнен в виде пружин, помещенных внутрь каждой телескопической опоры 1. Пружина расположена таким образом, чтобы максимально выдвигать телескопическую опору 1. При вращении колесно-шагового движителя, угол положения телескопических опор 1 относительно опорной поверхности 2 меняется и соответственно изменяется нагрузка на каждую опору. Вследствие реакции пружины, помещенной внутрь телескопической опоры - длина опоры будет меняться, тем самым снижая колебания вала колесно-шагового движителя.
Предлагаемое изобретение наилучшим образом может быть использовано для передвижения управляемых и автономных транспортных средств по пересеченной местности, включая болотистые и водные преграды, пашню и снежный покров. А в городе по лестницам и другим пороговым препятствиям, включая возможность хода по неблагоустроенным площадкам у подъездов зданий.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ведущее колесо малогабаритного транспортного средства | 2018 |
|
RU2692956C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Ведущее колесо малогабаритного транспортного средства с устройством для подъёма по лестницам | 2018 |
|
RU2698272C1 |
| Коляска с функцией подъёма по лестницам для людей с ограниченными возможностями в ходьбе | 2019 |
|
RU2688289C1 |
| Движитель, шагающий колесными опорами | 2020 |
|
RU2763058C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| Устройство гаситель колебаний для колесно-шагового движителя | 2020 |
|
RU2804337C2 |
| Способ и устройство компенсации колебаний для колесно-шагового движителя | 2019 |
|
RU2744646C2 |
| Устройство для подъёма кресла-коляски с ручным приводом по лестницам | 2023 |
|
RU2823397C1 |
| Колесно-шагающий движитель транспортного средства | 2024 |
|
RU2824228C1 |
Изобретение относится к безрельсовым транспортным средствам, в частности к точечным шагающим движителям. Шасси для передвижения по различным опорным поверхностям содержит колесно-шаговые движители, каждый из которых состоит из трех опор, закрепленных на общем валу симметрично относительно оси вращения вала и наклонно друг к другу, образуя боковые ребра воображаемой пирамиды. Вал расположен под углом к опорной поверхности таким образом, чтобы опорной поверхности касались не более двух опор от каждого колесно-шагового движителя одновременно. Вал закреплен с возможностью поперечных движений и кинематически связан с компенсатором колебаний, закрепленном на шасси. Достигается повышение надежности и скорости передвижения, повышение проходимости за счет повышения клиренса. 13 з.п. ф-лы, 6 ил.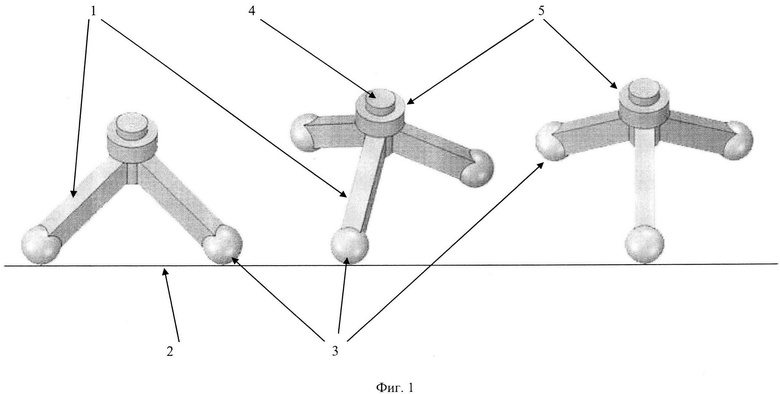
1. Шасси для передвижения по различным опорным поверхностям с колесно-шаговыми движителями, каждый из которых состоит по меньшей мере из трех опор, закрепленных на общем валу симметрично относительно оси вращения вала и наклонно друг к другу, образуя боковые ребра воображаемой пирамиды, при этом вал расположен под углом к опорной поверхности таким образом, чтобы опорной поверхности касались не более двух опор от каждого колесно-шагового движителя одновременно, причем вал закреплен с возможностью поперечных движений и кинематически связан с компенсатором колебаний, закрепленном на шасси.
2. Шасси по п. 1, отличающееся тем, что опоры закреплены на ступице, вращающейся на валу.
3. Шасси по п. 1, отличающееся тем, что угол между соседними опорами равен 90 градусам, а угол между опорами и осью вращения вала равен значению arccos(1/√3).
4. Шасси по п. 1, отличающееся тем, что компенсатор колебаний выполнен в виде кулачкового механизма с количеством кулачков, равным количеству опор на колесно-шаговом движителе и кинематически связанного с приводом колесно-шагового движителя.
5. Шасси по п. 1, отличающееся тем, что компенсатор колебаний выполнен с использованием кривошипно-шатунных механизмов, кинематически связанных с приводом колесно-шагового движителя.
6. Шасси по пп. 4 и 5, отличающееся тем, что механизм компенсатора колебаний включает в себя возвратную пружину.
7. Шасси по п. 1, отличающееся тем, что при использовании на шасси четного количества колесно-шаговых движителей, каждую пару колесно-шаговых движителей связывают между собой общим компенсатором колебаний рычажного типа, при этом в каждой паре колесно-шаговых движителей валы приводятся во вращение от общего привода, а опоры на данных валах устанавливают в противофазе.
8. Шасси по п. 1, отличающееся тем, что на конце каждой опоры подвижно закреплен опорный башмак.
9. Шасси по пп. 1 и 8, отличающееся тем, что при использовании на шасси только одного колесно-шагового движителя, для возможности маневрирования опорный башмак и его опору связывают через управляемый механизм вращения.
10. Шасси по п. 9, отличающееся тем, что содержит дополнительный механизм поворота вала относительно шасси в такое положение, при котором все три опоры касаются опорной поверхности.
11. Шасси по п. 1, отличающееся тем, что при использовании на шасси трех или более колесно-шаговых движителей, для возможности маневрирования используют механизм, приводящий в одновременное и синхронное поворачивание в общей плоскости всех колесно-шаговых движителей, при этом сами колесно-шаговые движители выполнены с возможностью синхронного движения.
12. Шасси по п. 1, отличающееся тем, что опоры выполнены в виде герметичных объемных тел для возможности перемещения по водным опорным поверхностям.
13. Шасси по п. 1, отличающееся тем, что опоры выполнены с возможностью изменения своей длины для возможности перемещения по лестничным маршам различного размера.
14. Шасси по пп. 1 и 13, отличающееся тем, что компенсатор колебаний выполнен в виде телескопических опор и пружин, помещенных внутрь каждой опоры.
| CN 204279688 U, 22.04.2015 | |||
| CN 103192897 A, 10.07.2013 | |||
| Пюпитр для работы на пишущих машинах | 1922 |
|
SU86A1 |
| Движитель транспортного средства | 1986 |
|
SU1421598A1 |

