Предпосылки создания изобретения
Настоящее изобретение относится к транспортерам для перемещения людей, таким как эскалаторы, движущиеся дорожки (тротуары), и другим аналогичным механизмам, которые можно легко смонтировать, например, на лестницах на железнодорожном вокзале, в общественных помещениях, на пандусе или горизонтальной площадке.
Известный транспортер для перемещения людей, в частности эскалатор, сконструированный специально для уменьшения размеров пространства, необходимого для его размещения, и прежде всего высоты его несущей рамы, описан, например, в японской патентной публикации 48-19996 и в японской выложенной патентной заявке 6-32577.
В этом транспортере для перемещения людей имеются направляющие звездочки большого диаметра, которые расположены в приводном отсеке на обоих концах несущей рамы и которые огибает бесконечная цепь ступеней, изменяющая на концах рамы направление движения с одновременным переворачиванием ступеней, у которых в этот момент лицевые поверхности оказываются обращенными вниз. Такая конструкция несмотря на уменьшение высоты приводного отсека или высоты несущей рамы не позволяет уменьшить размеры пространства, необходимого для размещения всего эскалатора.
Краткое изложение сущности изобретения
Задачей изобретения является создание нового транспортера для перемещения людей, конструкция которого позволяла бы уменьшить размеры пространства, необходимого для его размещения, за счет уменьшения высоты приводного отсека несущей рамы.
Другой задачей изобретения является создание транспортера для перемещения людей с плавным ходом всего большого количества имеющихся в нем ступеней при их движении в прямом и обратном направлениях между этажами здания.
Для решения этих задач в изобретении предлагается транспортер для перемещения людей, имеющий множество соединенных в бесконечный ряд ступеней, непрерывно движущихся внутри несущей рамы таким образом, что при движении в прямом и обратном направлениях лицевые поверхности ступеней всегда остаются обращенными вверх.
В таком транспортере для перемещения людей каждая ступень, движущаяся в прямом направлении (или в обратном направлении), меняет траекторию своего движения на обратное направление (или на прямое направление) таким образом, что ее лицевая поверхность всегда остается обращенной вверх. В этом случае высота конструкции несущей рамы будет определяться только высотой свободного пространства, необходимого для размещения ступеней, у которых лицевые поверхности будут всегда обращены вверх, при движении в прямом и обратном направлениях, в связи с чем отпадает необходимость в использовании направляющей звездочки большого диаметра, огибая которую каждая ступень должна перевернуться на 180o. В результате этого высота несущей рамы в том месте, где происходит изменение направления движения ступеней с прямого на обратное (и наоборот), может быть существенно уменьшена, и поэтому могут быть существенно уменьшены размеры пространства, необходимого для размещения всего транспортера для перемещения людей.
Кроме того, в изобретении предложен механизм переноса ступеней, который перемещает каждую ступень на участке изменения направления движения с обращенной вверх лицевой поверхностью ступени и обеспечивает плавное движение ступеней при изменении направления движения с прямого на обратное.
Краткое описание чертежей
Ниже изобретение поясняется со ссылкой на прилагаемые чертежи, на которых показано:
на фиг. 1 - схематичное изображение вида сбоку эскалатора, выполненного по первому варианту,
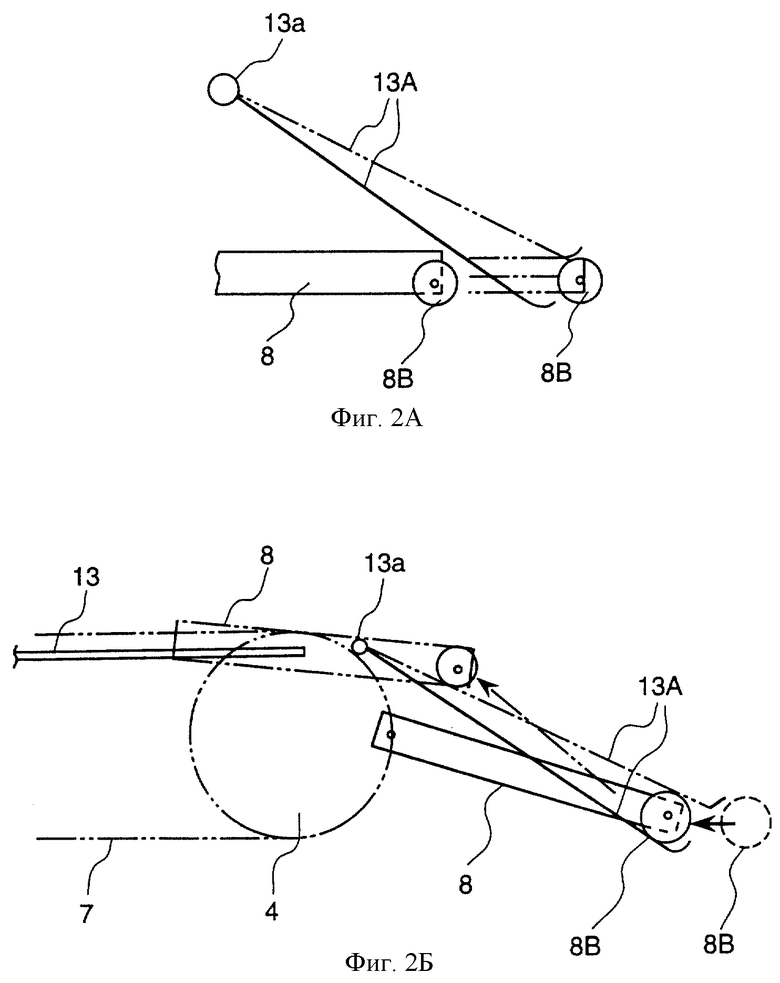
на фиг. 2А и 2Б - схемы, на которых показано, каким образом происходит изменение направления движения ступени в нижней части эскалатора, показанного на фиг.1, при этом на фиг.2А горизонтальный переносящий ступени ролик изображен в момент перехода на верхнюю направляющую, а на фиг.2Б ролик показан в положении, когда он уже находится на направляющей,
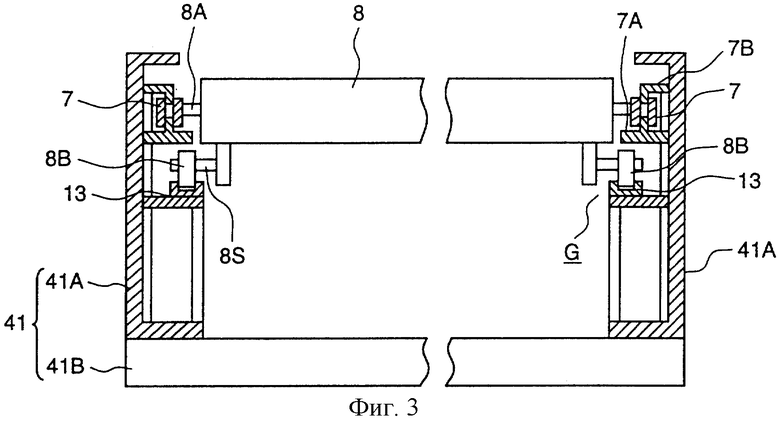
на фиг.3 - вид спереди в поперечном разрезе эскалатора по фиг.1,
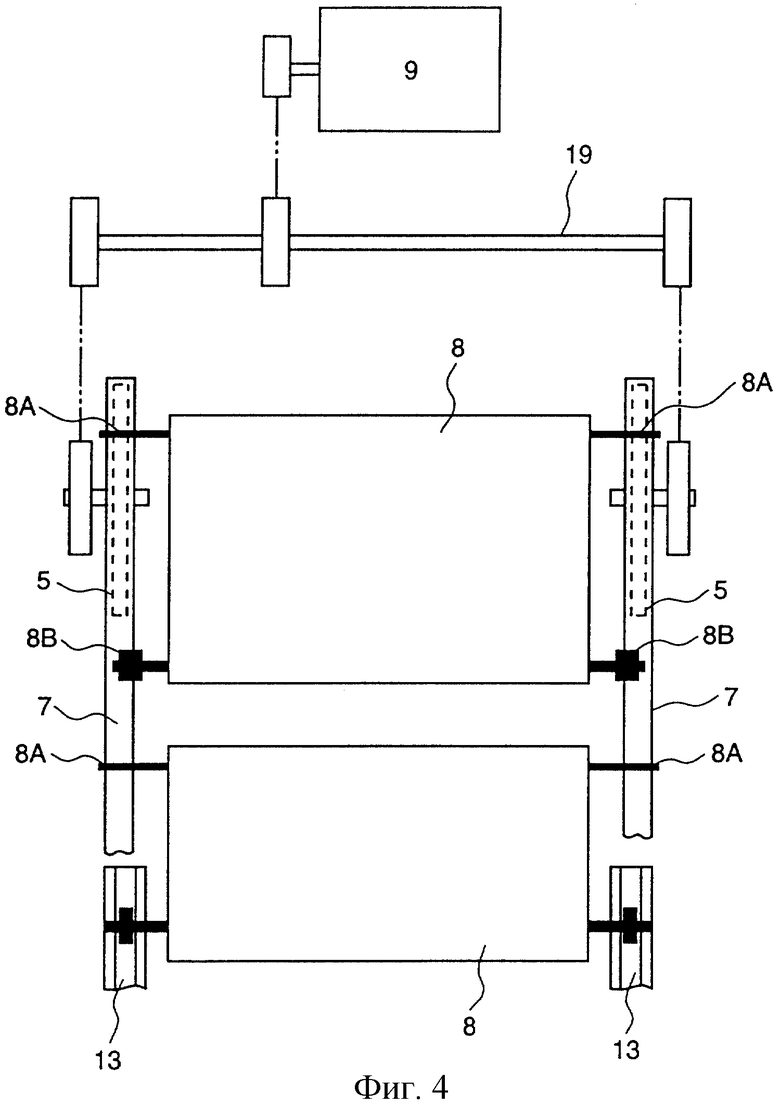
на фиг.4 - вид сверху расположенного наверху участка эскалатора по фиг. 1,
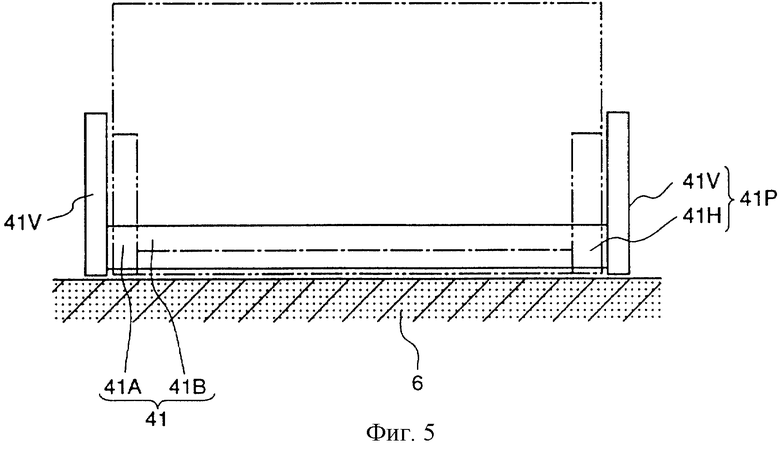
на фиг.5 - схема, на которой в поперечном сечении изображен вариант монтажа показанного на фиг.1 эскалатора на лестничном марше,
на фиг. 6 - схема, иллюстрирующая другой вариант монтажа показанного на фиг.1 эскалатора на лестничном марше,
на фиг.7 - схема, на которой показан вид сбоку на эскалатор, выполненный по второму варианту,
на фиг.8 - схема, на которой показан продольный разрез эскалатора, выполненного по третьему варианту,
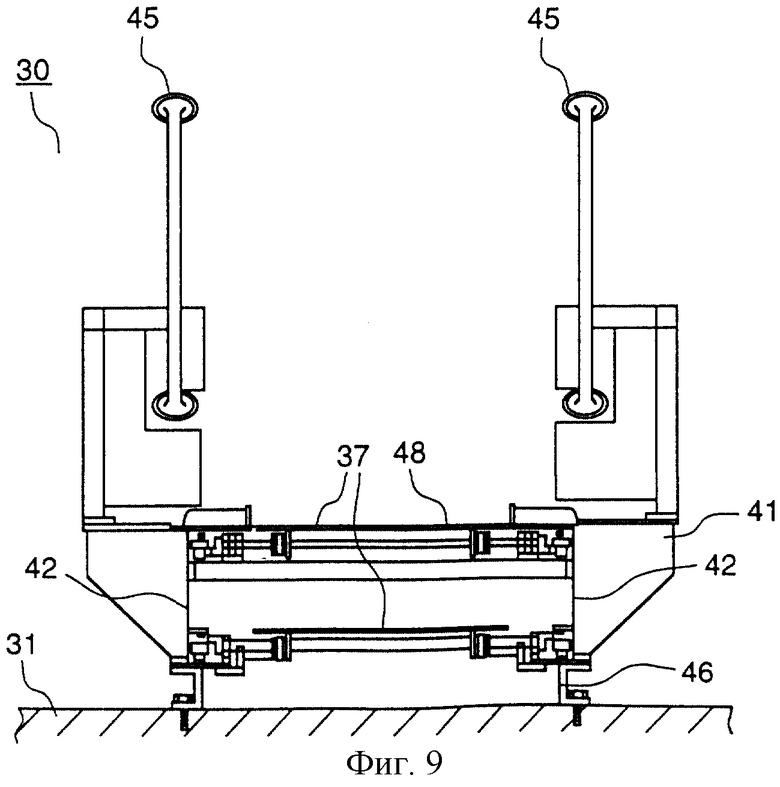
на фиг.9 - изображение в увеличенном масштабе поперечного сечения одного из участков эскалатора по фиг.8,
на фиг.10 - часть изображенного на фиг.9 поперечного сечения участка эскалатора вблизи одной из его ступеней в увеличенном масштабе,
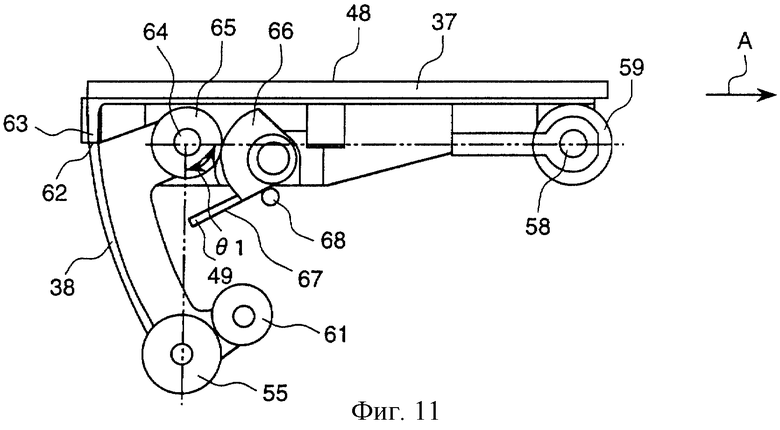
на фиг.11 - вид сбоку ступени, свисающий вниз подступенок которой находится в рабочем, или закрытом, положении,
на фиг.12 - вид сбоку ступени, подступенок которой находится в прижатом к ступени, или сложенном (нерабочем), положении,
на фиг. 13 - вид сбоку в увеличенном масштабе расположенного на верхнем этаже участка эскалатора по фиг.8,
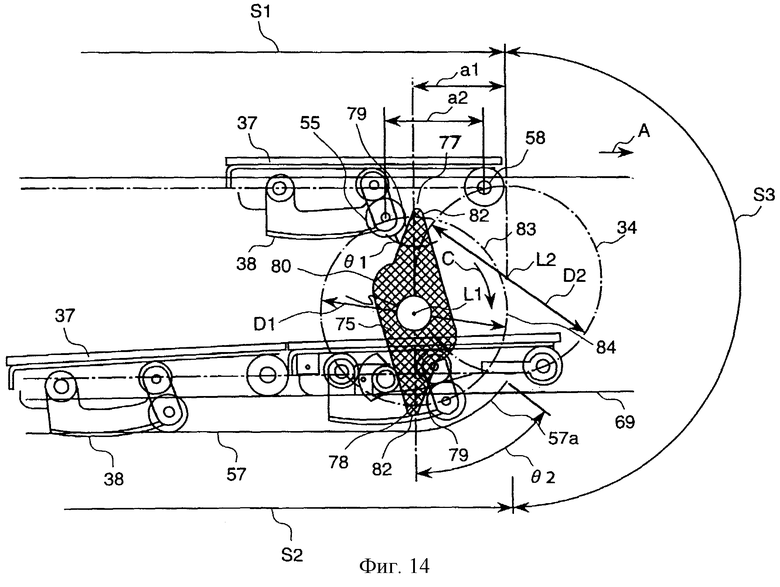
на фиг.14 - вид сбоку в увеличенном масштабе ступени эскалатора по фиг.8 в момент ее входа в зону перехода на нижнюю ветвь,
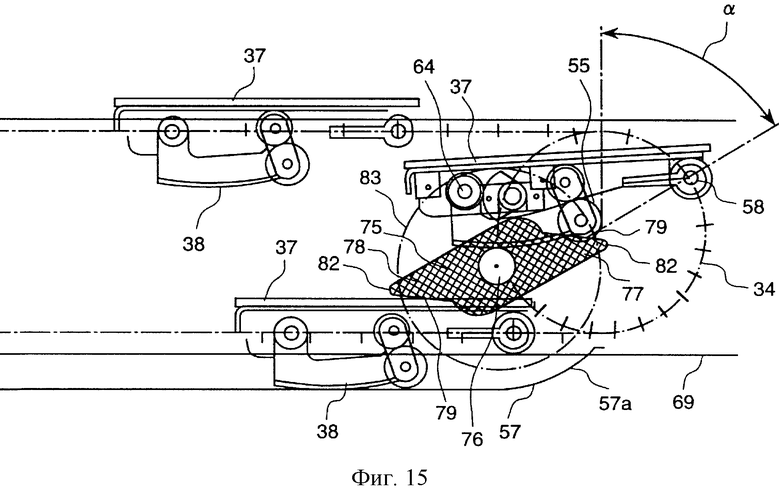
на фиг.15 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 57,6o,
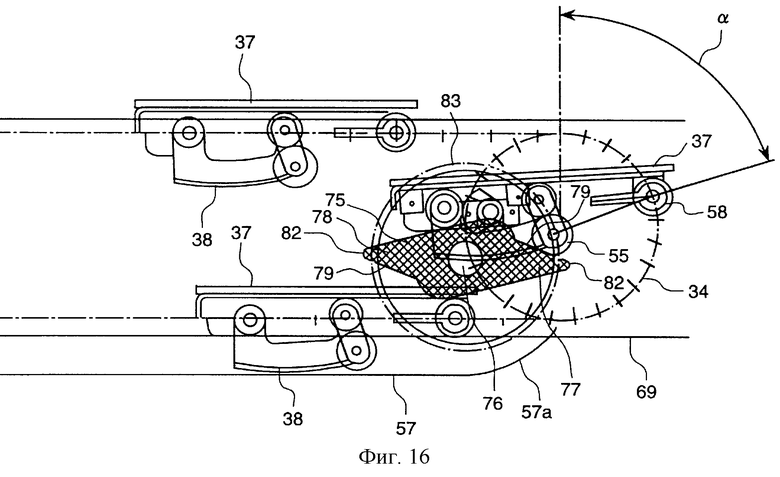
на фиг.16 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 72o,
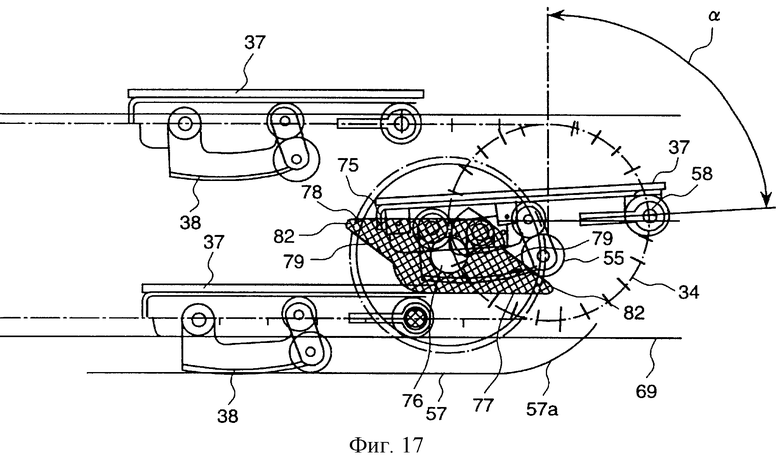
на фиг.17 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 86,4o,
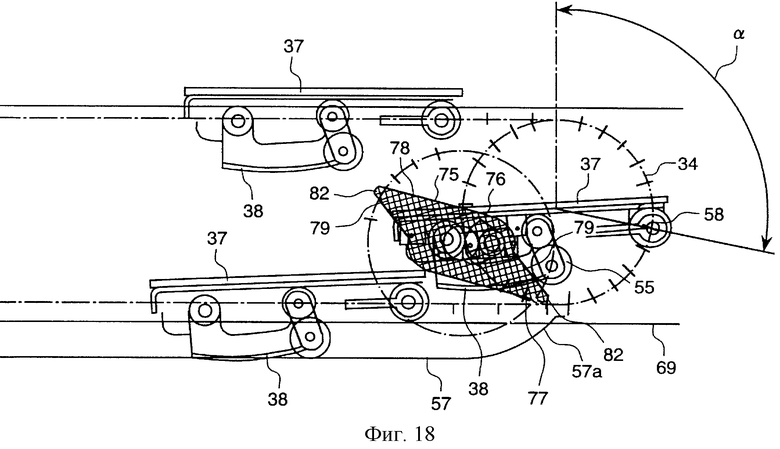
на фиг.18 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 100,8o,
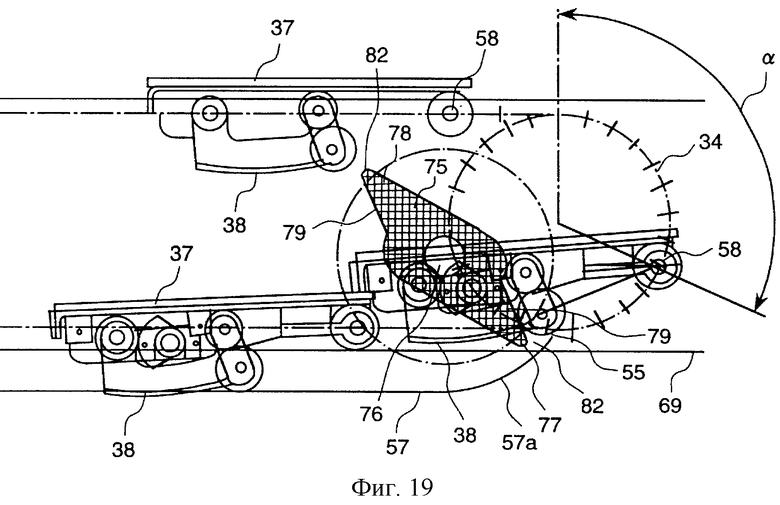
на фиг.19 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 115,2o,
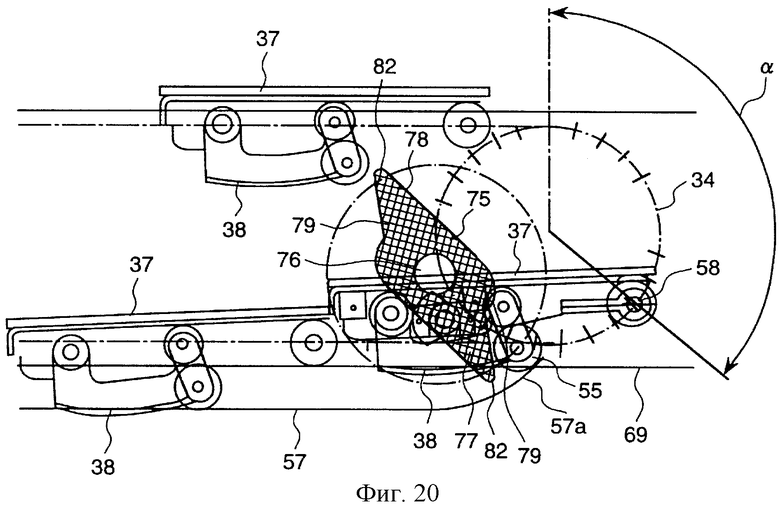
на фиг.20 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 129,6o,
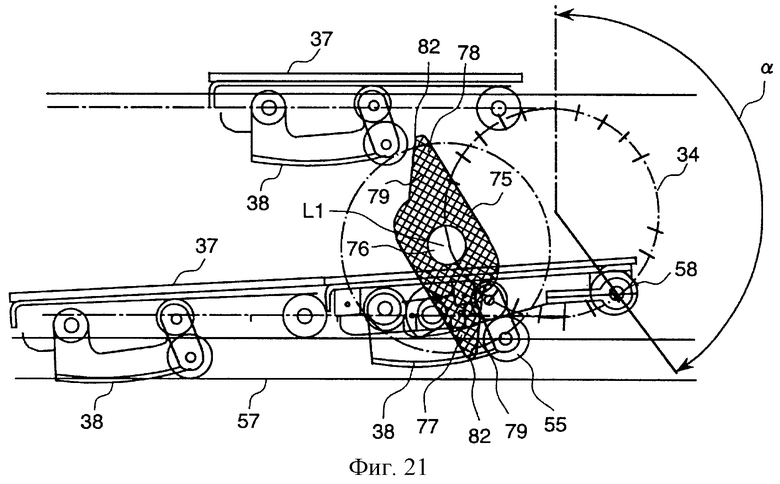
на фиг.21 - вид сбоку верхней звездочки эскалатора по фиг.8 после ее поворота из исходного положения на 144o,
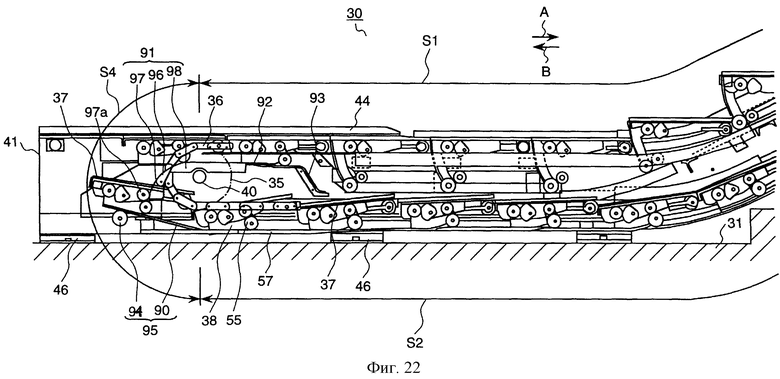
на фиг.22 - вид сбоку расположенного на нижнем этаже участка эскалатора по фиг.8,
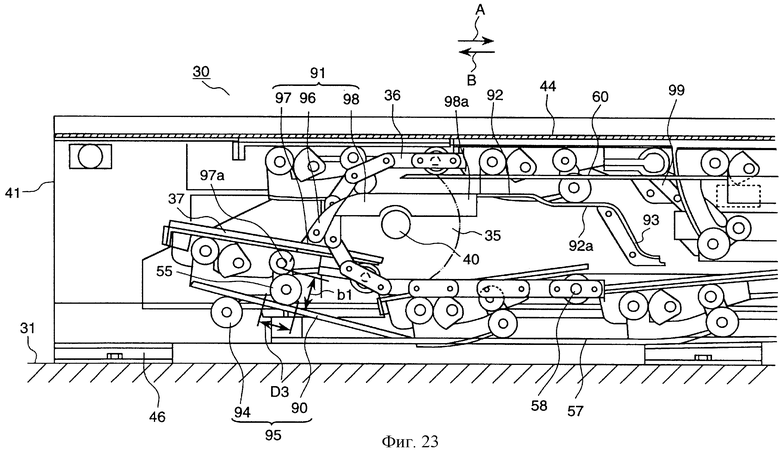
на фиг.23 - вид сбоку показанного на фиг.8 направляющего ролика, который катится по наклонному заднему концу нижней направляющей подступенка,
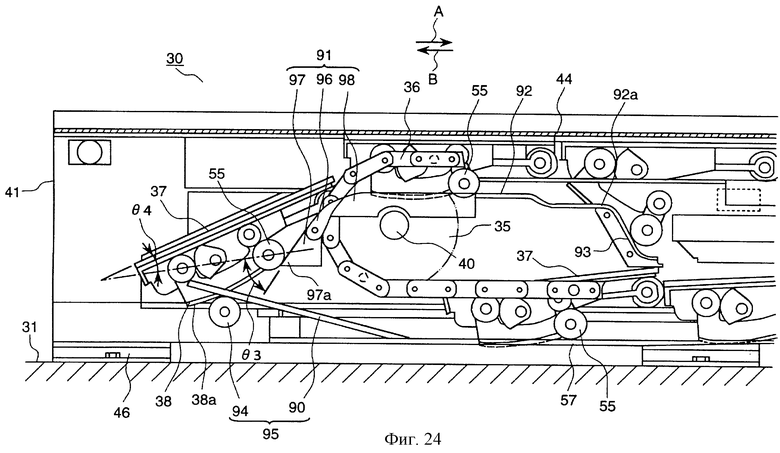
на фиг.24 - вид сбоку показанного на фиг.8 направляющего ролика, который поднимается вверх по опорной пластине первой направляющей подступенка,
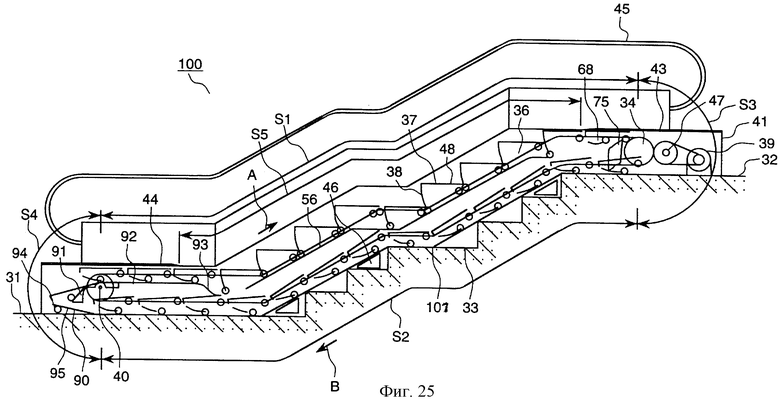
на фиг.25 - вид сбоку эскалатора, выполненного по четвертому варианту,
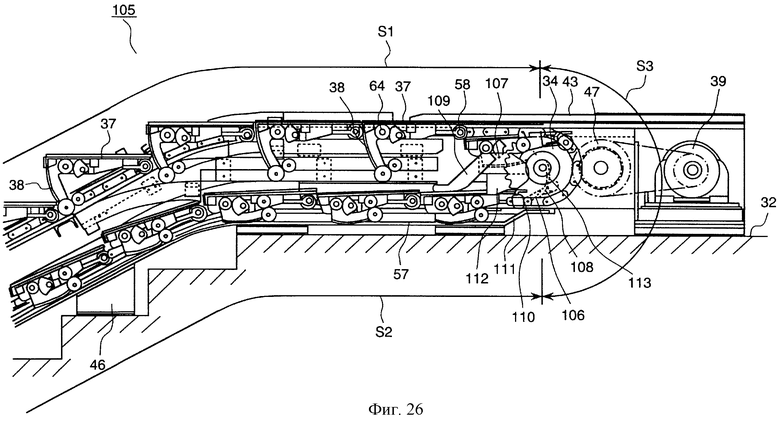
на фиг. 26 - вид сбоку расположенного на верхнем этаже участка эскалатора, выполненного по пятому варианту,
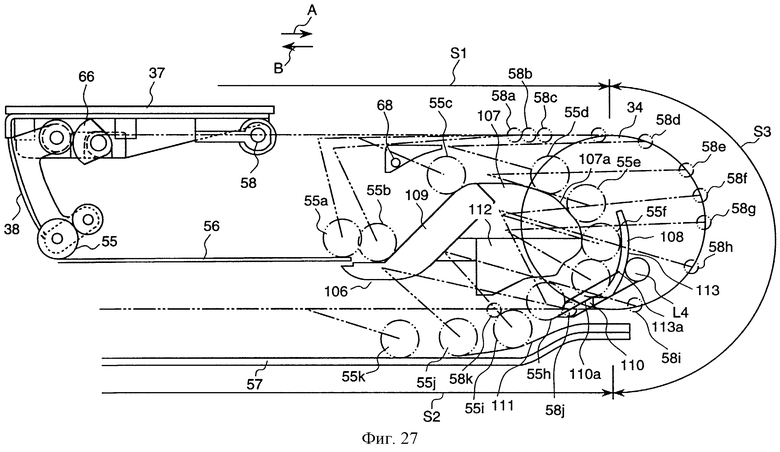
на фиг.27 - вид сбоку в увеличенном масштабе показанного на фиг.26 участка эскалатора, расположенного у верхней звездочки, и
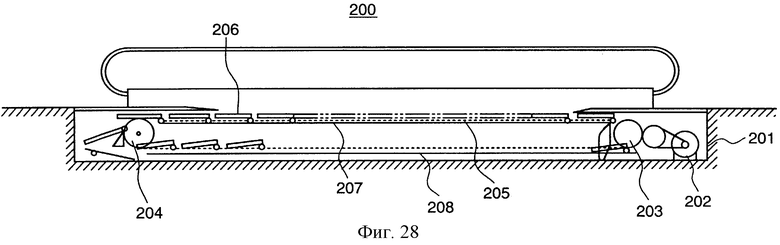
на фиг.28 - вид сбоку приводимой в движение от электродвигателя движущейся пешеходной дорожки, выполненной в соответствии с шестым вариантом.
Предпочтительный вариант выполнения изобретения
Ниже со ссылками на фиг.1-4 на примере эскалатора рассмотрен первый вариант выполнения предлагаемого в настоящем изобретении транспортера для перемещения людей. Эскалатор 1 имеет опорную рамную конструкцию 41, включающую пару боковых рам 41А и нижнюю раму 41В, соединяющую боковые рамы 41А. Эта опорная рамная конструкция 41 установлена на лестнице 6 между нижним 2 и верхним 3 этажами. На верхних концах обеих боковых рам 41А установлены две верхние звездочки 5, которые могут поворачиваться вокруг своих осей, а на нижних концах рам установлены две нижние звездочки, которые также могут вращаться вокруг своих осей.
Боковые рамы 41А имеют у верхнего и нижнего концов горизонтальные участки, а в середине - наклонный участок с углом наклона, соответствующим наклону лестницы 6.
Две приводные цепи 7 огибают расположенные симметрично верхние 5 и нижние 4 звездочки. Эти приводные цепи 7 проходят вдоль нижней рамы 41В, к которой примыкают их возвратные ветви.
Несущие концы 8А ступеней 8 эскалатора шарнирно соединены с приводными цепями 7, а на расположенных на свободных концах ступеней 8 осях 8S установлены с возможностью вращения горизонтальные переводные ролики 8В.
Ролики 8В расположены в направляющих 13, закрепленных на обеих боковых рамах 41А. Ролики 8В и направляющие 13 вместе образуют направляющую систему G эскалатора.
Направляющие 13 расположены вдоль движущихся поступательно вперед ступеней 8 и в средней наклонной части рамы удалены от приводной цепи 7 на определенное расстояние, а затем опять приближаются к цепи 7 в верхнем конце рамы 41А. Следует также отметить, что направляющие 13 выполнены в виде отдельных деталей и не соединены с не показанной на чертежах направляющей, по которой перемещаются ролики при возвратном ходе ступеней.
Конструкция направляющей 13 с расположенным на ее верхней поверхности пазом обеспечивает движение горизонтального переводного ролика 8 в соответствующем направлении. В качестве направляющих цепи 7 используются направляющие брусья 7А и 7В.
При работе эскалатора верхние звездочки 5 приводятся во вращение с необходимой скоростью приводом 9, в частности электродвигателем, снабженным соответствующим регулятором (не показан). Изменяя направление вращения привода 9, можно легко изменять направление движения цепи 7 с прямого на обратное.
При подъеме эскалатора и перемещении цепи 7 в направлении, обозначенном на чертеже стрелкой Р, ступени 8, шарнирно прикрепленные к цепи 7 своими несущими концами, плавно поднимаются вверх, сохраняя при этом горизонтальное положение. При спуске эскалатора и перемещении цепи 7 в направлении Q шарнирно соединенные с ней ступени 8 также сохраняют горизонтальное положение и плавно опускаются вниз.
Ниже со ссылками на фиг.2А и 2Б рассмотрен процесс перехода ступеней 8 с прямой ветви на обратную и наоборот, который происходит при движении ступеней по кругу, в частности, у нижних звездочек 4.
Вблизи нижних звездочек 4 имеются верхние переводные направляющие 13А, не связанные жестко с направляющими 13. Как показано на фиг.2А штрих-пунктирной линией, эти направляющие 13А приподнимаются, когда ролики 8В проходят к месту перехода с обратной ветви эскалатора на прямую. Затем направляющие 13А падают вниз, и меняющие направление движения ролики поднимаются по ним к направляющим 13, что показано штрих-пунктирными линиями на фиг.2Б. Позицией 13а на этом чертеже обозначена шарнирная ось поворота верхней направляющей 13А. Такой переводной механизм позволяет осуществить перевод ступеней 8 с обратной ветви на прямую с постоянно обращенными вверх их лицевыми поверхностями.
Как уже было отмечено выше, на нижнем этаже 2 ступени 8 обкатываются по наружной поверхности нижних звездочек 4, при этом их рабочие поверхности все время остаются обращенными вверх. Расположенные на верхнем этаже 3 верхние звездочки 5 установлены на отдельных осях, и ступени 8 могут свободно проходить в зазоре между ними.
В конструкции, в которой ступени 8 присоединены к цепи 7 обращенной к нижнему этажу 2 стороной, механизм перехода необходимо спроектировать таким образом, чтобы ступени с обращенной вверх рабочей поверхностью могли, обкатываясь по наружной поверхности расположенных на верхнем этаже 3 верхних звездочек 5, свободно проходить через зазор между расположенными на нижнем этаже 2 нижними звездочками 4.
Из сказанного выше следует, что при креплении ступеней 8 к цепям 7 концами, обращенными вперед по ходу движения, ступени 8 должны проходить через зазор между звездочками, находящимися в направлении движения перед ними. В другом случае, когда ступени 8 прикреплены к цепям 7 концами, обращенными назад по движению, они должны проходить через зазор между звездочками, находящимися в направлении движения за ними. При этом и в том, и в другом случаях обеспечивается плавность перехода ступеней с одной ветви цепей на другую, однако более предпочтительным с точки зрения упрощения конструкции является первый вариант, когда ступени проходят через зазор между звездочками, которые находятся перед ними и соединены с приводом 9.
На фиг. 4 в виде сверху показан участок эскалатора, расположенный у верхних звездочек 5, в том месте, где нет направляющих 13 и где расположен механизм, обеспечивающий возможность перехода горизонтального переводного ролика 8В с верхней ветви на нижнюю без поворота ступеней 8 на 180o. Механизм переноса ступеней, который расположен в зазоре между двумя верхними звездочками 5 и двумя нижними звездочками 4, обеспечивает свободное изменение направления движения ступеней с постоянно обращенной вверх лицевой, или рабочей, поверхностью. Позицией 19 на чертежах обозначен промежуточный вал, через который усилие от приводного двигателя 9 передается к двум симметрично расположенным верхним звездочкам 5.
В описанном выше варианте изобретения благодаря тому, что изменение направления движения ступеней происходит без их поворота на 180o, высота опорной рамы 41 может быть заметно уменьшена. В результате этого могут быть уменьшены и размеры пространства, необходимого для установки эскалатора, что позволяет осуществить его установку, например, на лестницах с ограниченной высотой потолка без всяких дополнительных строительных работ.
Ниже со ссылками на фиг.5 приведено описание варианта монтажа эскалатора на лестнице 6.
К нижней раме 41В или к боковым рамам 41А опорной рамы 41 эскалатора крепятся анкерные узлы 41P, которые монтируются на лестнице 6 и имеют правые и левые анкерные опоры 41V и крепежные детали 41Н, которыми анкерные узлы крепятся к рамам.
Анкерные узлы 41P могут быть установлены на каждой ступени лестницы или с интервалом в несколько ступеней. Для изготовления анкерных узлов можно использовать трубы, листы, полимеры или другой пригодный для этой цели материал. Кроме того, хотя наиболее предпочтительным является вариант выполнения крепежных деталей 41Н за одно целое с анкерными опорами 41V (конструктивно в виде плоских треугольных пластин), тем не менее наличие плоских нижних поверхностей у этих деталей не является обязательным, и они могут быть выполнены в виде стержней, разъемно крепящихся к паре опор 41V. Более того, каждую крепежную деталь 41Н в отдельности можно выполнить откидной.
Анкерные узлы 41P могут просто монтироваться на лестнице и легко сниматься или могут крепиться к лестнице постоянно в том случае, если эскалатор предназначен для постоянной или длительной эксплуатации.
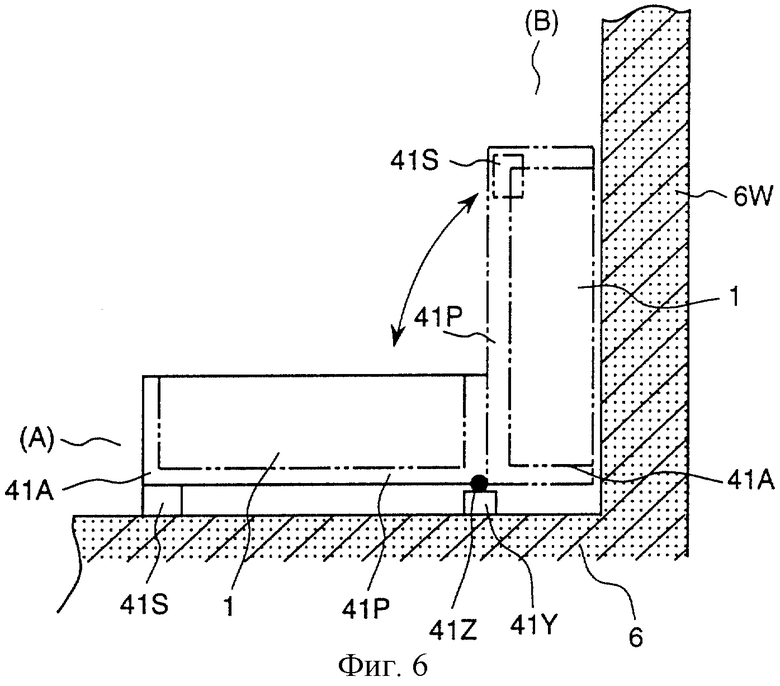
На фиг.6 показан установленный вдоль лестницы 6 опорный брус 41Y с закрепленной на нем шарнирной осью 41Z, на которую шарнирно опираются анкерные узлы 41P, причем этот брус отстоит от боковой стены 6W лестницы 6 на расстояние, равное высоте боковой рамы 41А. Тем самым создается возможность держать неработающий эскалатор 1 вместе с анкерными узлами 41Р в поднятом вертикальном положении (В) вдоль боковой стены 6W и использовать лестницу 6 по ее прямому назначению и при необходимости опускать его вниз, устанавливая его вдоль лестницы б в рабочее положение (А).
Кроме того, как показано на фиг.6, в анкерном узле 41P имеется убирающийся опорный брус 41S, который, выступая наружу, крепится в положении (А) на одном уровне с шарнирным опорным брусом 41Y или же крепится в положении (В), располагаясь внутри анкерного узла 41Р и не выступая наружу за его нижнюю поверхность.
В описанном выше варианте вместо приводной цепи 7 можно использовать гибкий бесконечный ремень, проволочный либо любой другой вид приводного ремня.
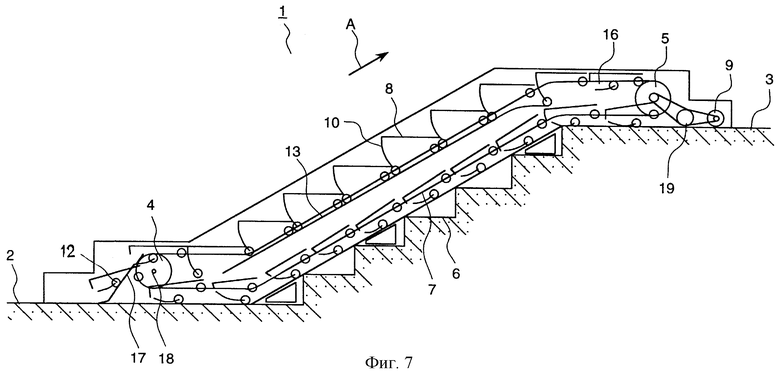
На фиг.7 показан второй вариант монтажа эскалатора, предлагаемого в настоящем изобретении.
В этом варианте эскалатор установлен на лестнице 6, соединяющей нижний этаж 2 с верхним 3. Две приводные цепи 7 охватывают пару верхних 5 и нижних 4 звездочек соответственно на верхнем и нижнем этажах. К цепям 7 прикреплены ступени 8. Цепи 7 приводятся в движение двигателем 9, обеспечивающим перемещение пассажиров в направлении, обозначенном на чертеже стрелкой А, т.е. с нижнего этажа на верхний.
Каждая ступень 8 шарнирно (с возможностью изменения угла наклона) прикреплена к цепям 7 концом, обращенным к верхнему этажу 3, а на другом конце ступени, обращенном к нижнему этажу, расположен подступенок 10, который в зоне перемещения пассажиров (на прямой ветви эскалатора) свисает вниз, перекрывая зазор между соседними ступенями 8. При движении по возвратной ветви свободный конец подступенка 10 смещается к ступени 8 и оказывается расположенным почти параллельно ступени 8. Такая конструкция позволяет заметно уменьшить высоту опорной рамы и обеспечивает возможность создания относительно небольшого по размерам эскалатора при существенном снижении его высоты. Такой предлагаемый в изобретении эскалатор 1 можно устанавливать на лестнице 6, обеспечив достаточно большое расстояние от эскалатора до потолка.
Несущий конец подступенка 10 шарнирно (с возможностью изменения угла наклона) закреплен на оси, проходящей по всей ширине ступени 8. На этой же оси закреплена шестерня, с которой входит в зацепление зубчатый сектор. При повороте зубчатого сектора и шестерни подступенок 10 поворачивается и оказывается расположенным под ступенью в сложенном (нерабочем) положении.
Как показано на фиг. 7, в зоне перемещения людей свисающий вниз конец подступенка 10, соединенного со ступенью 8, направленно перемещается по расположенным в средней наклонной секции рамы направляющим 13 и перекрывает зазор между ступенями 8, у которых лицевые поверхности располагаются горизонтально. На верхнем этаже 3 рядом с верхним концом опорной рамы расположен кулачковый управляющий ролик 16, взаимодействующий с движущейся горизонтальной ступенью 8 и принудительно поворачивающий зубчатый сектор, который при этом через шестерню поворачивает непосредственно перед верхней звездочкой 5 подступенок 10 в нерабочее положение. Таким образом подступенок 10 переходит с верхней ветви эскалатора на нижнюю в прижатом снизу к ступени сложенном положении. Соответствующие детали для поворота подступенка 10 в нерабочее сложенное положение имеются на всех ступенях эскалатора, и поэтому подступенки всех ступеней при воздействии на них кулачкового управляющего ролика 16 поворачиваются в сложенное (нерабочее) положение.
На нижнем этаже 2 расположена верхняя направляющая 17, предназначенная для перемещения подступенка 10, находящегося в нерабочем сложенном положении, с обратной ветви эскалатора на прямую. Верхняя направляющая 17, которая имеет свободный нижний конец, шарнирно закреплена на раме и может менять свое угловое положение. Когда в нижней части эскалатора (фиг.7) ступень 8 движется влево, она поднимает нижний конец направляющей 17, а при изменении направления движения ступени (вправо) на верхнюю поверхность направляющей 17 опускается катящийся по ней направляющий ролик 12. Поскольку подступенок 10 переводится с нижней возвратной ветви цепи на верхнюю поступательную ветвь в нерабочем сложенном под ступенью положении, вращающийся вал 18 нижней звездочки 4 не мешает проходу ступени. До начала участка подъема подступенок 10, прошедший через звездочку 4, возвращается в свое первоначальное висячее положение.
При такой конструкции подступенка 10 ступени 8 могут переходить с верхней поступательной ветви эскалатора на нижнюю возвратную и наоборот, постоянно сохраняя свои лицевые поверхности обращенными вверх.
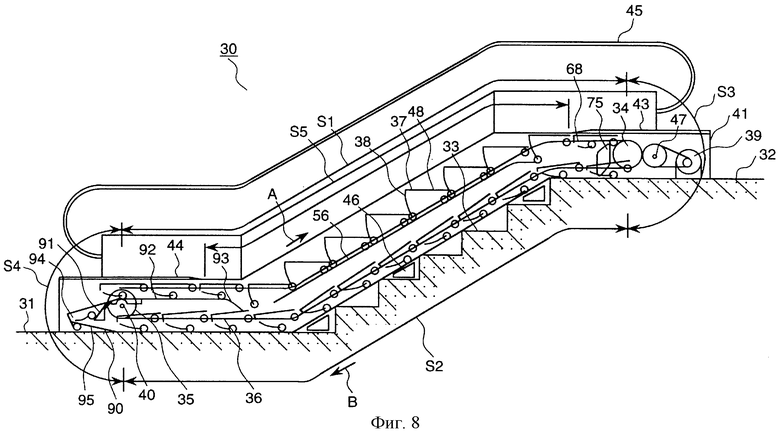
На фиг.8 и 9 показан третий вариант предлагаемой в изобретении конструкции эскалатора.
Эскалатор 30, выполненный по третьему варианту, установлен на лестнице 33, соединяющей нижний этаж 31 с верхним этажом 32. Эскалатор 30 имеет опорную раму 41, занимающую пролет между нижним 31 и верхним 32 этажами. В верхней части рамы, расположенной на верхнем этаже 32, имеется пара верхних звездочек 34, отделенных друг от друга в направлении, перпендикулярном плоскости чертежа по фиг.8, и смонтированных соосно на одной линии в направлении ширины рамы. Таким же образом в нижней части рамы 41 на нижнем этаже 31 смонтирована пара нижних звездочек 35.
К паре приводных бесконечных роликовых цепей 36, охватывающих верхние и нижние звездочки 34 и 35, прикреплены проходящие между верхним и нижним этажами ступени 37. Каждая ступень 37 соединена с приводными цепями своим передним концом, т.е. концом, обращенным к верхнему этажу 32, и может легко поворачиваться вокруг шарнирной оси, проходящей в направлении ширины рамы. К противоположному концу каждой ступени 37, обращенному к нижнему этажу 31, своим (верхним) несущим концом шарнирно прикреплен подступенок 38, который может поворачиваться вокруг оси, параллельной ширине рамы.
В расположенной на верхнем этаже 32 верхней части рамы 41 смонтирован приводной двигатель 39, вращение которого передается на промежуточный вал 47. Шестерни, закрепленные на обоих концах промежуточного вала 47, зацепляются с шестернями, соединенными с верхними звездочками 34, и передают им мощность от приводного двигателя. Для передачи вращения от приводного двигателя 39 к звездочкам 34 может также использоваться, как и в обычном эскалаторе, цепь.
Как уже было отмечено выше, соединенная со звездочками 34 и 35 приводная цепь 36 перемещает ступени 37 от нижнего этажа 31 к верхнему 32 вдоль верхней части рамы на прямом верхнем участке движения, обозначенном S1.
В приведенном ниже описании направление движения ступеней 37 на верхнем участке S1 по стрелке А (вверх) называется направлением А, а противоположное направление движения ступеней вниз на прямом обратном участке S2 по стрелке В называется направлением В.
Каждая верхняя звездочка 34 имеет конструкцию, обеспечивающую ее вращение от промежуточного вала 47 с отсутствием оси в промежутке между звездочками, что позволяет ступеням 37 и подступенкам 38 свободно проходить между звездочками 34. Расположенные на другом конце эскалатора нижние звездочки 35 имеют общую ось 40, и поэтому для прохода ступеней между звездочками в том месте, где проходит их общая ось 40, подступенок 38 должен находиться в нерабочем сложенном положении, как более подробно описано ниже.
На нижнем этаже 31 на опорной раме 41 имеется настил 44, по которому люди проходят вперед, попадая на эскалатор. На расположенном на верхнем этаже 32 участке опорной рамы 41 также имеется настил 43. На нижнем этаже 31 каждая ступень 37 движется горизонтально под нижним настилом 44, затем выходит из-под настила, поднимается вдоль лестницы 33 вверх, движется горизонтально вдоль расположенного на верхнем этаже 32 верхнего участка рамы верхнего этажа и попадает под верхний настил 43. Та часть участка S1 верхней ветви цепи 36, которая расположена между нижним настилом 44 и верхним настилом 43 и на которой ступени 37 не закрыты настилами, называется транспортной зоной S5.
В зоне S5 рабочие, или лицевые, поверхности 48 каждой ступени 37, которые занимают люди, находятся в горизонтальном положении, а каждый подступенок 38, соединенный с каждой ступенью, находится в висячем положении, перекрывая вертикальный зазор между соседними ступенями.
Следующий участок приводной цепи 36, расположенный вблизи верхней звездочки 34 в том месте, где цепь огибает звездочку 34, называется зоной S3 перехода ступеней вниз (в дальнейшем обозначаемой как нижняя зона S3). В этой нижней зоне S3 ступени 37 переходят с верхнего прямого участка S1 на нижний прямой участок S2, оставаясь при этом повернутыми своей лицевой, или рабочей, поверхностью 48 вверх. Аналогичным образом и участок эскалатора, расположенный вблизи нижней звездочки 35 в том месте, где цепь огибает звездочку 35, называется зоной S4 перехода ступеней вверх (в дальнейшем обозначаемой верхней зоной S4). В этой верхней зоне S4 ступени 37 переходят с нижнего прямого участка S2 на верхний прямой участок S1, оставаясь повернутыми своей лицевой, или рабочей, поверхностью 48 вверх.
По обеим сторонам несущей рамы 41 смонтированы перила с бесконечными поручнями 45. Поручни 45 приводятся в движение приводом 39 и перемещаются по замкнутой траектории с той же скоростью, что и приводная цепь 36. Поэтому люди, ступившие на нижнем этаже 31 с нижнего настила 44 на поверхность 48 ступени 37, могут при подъеме на верхний этаж 32 держаться за движущиеся синхронно со ступенями поручни 45.
Несущая рама 41 крепится к нижнему полу 31, верхнему полу 32 и к лестнице 33 простыми крепежными приспособлениями 46. Эти крепежные приспособления 46 имеют анкерные болты и могут быть выполнены съемными. В полу нижнего этажа 31, на полу верхнего этажа 32 и в ступеньках лестницы 33 предусмотрены отверстия под болты крепежных приспособлений 46, позволяющие при установке в них болтов легко закрепить раму эскалатора на лестничном марше. Такой способ монтажа эскалатора 30 на лестничном марше снижает стоимость строительных работ и существенно облегчает процесс сборки и демонтажа эскалатора 30.
Кроме того, несущую раму 41 можно изготовить разъемной из нескольких секций, максимальная длина которых предпочтительно не должна превышать 5 м. Такая конструкция рамы облегчает транспортировку, сборку и демонтаж эскалатора.
На фиг.10 в поперечном разрезе плоскостью, проходящей через ступени 37, в увеличенном масштабе показан участок изображенного на фиг.9 эскалатора. На фиг. 11 в виде сбоку показан находящийся в рабочем (висячем) положении подступенок 38. На фиг.12 этот же подступенок 38 также показан в виде сбоку в нерабочем (сложенном) положении.
Рабочие поверхности подступенка 38 и ступени 37 выполнены в виде гребенок. В транспортной зоне S5 гребенки подступенка и ступени находятся в зацеплении друг с другом.
На обращенном к верхнему этажу 32 конце ступени 37 имеется ось 58, которой ступень крепится к цепи. На выступающих за пределы ступени концах оси 58 установлены направляющие ролики 59, которые могут свободно вращаться вокруг оси 58 и которые соединены с цепью 36 таким образом, что ось 58 может поворачиваться относительно цепи. К боковой стенке 42 рамы 41 вдоль средней наклонной верхней части верхней S1 и нижней S2 зон крепятся соответственно верхние 60 и нижние 69 направляющие ступеней, при этом, когда ступень 37 перемещается в зоне S1, направляющие ролики 59 катятся по направляющим 60, а при движении ступеней в зоне S2 - по направляющим 69. Кроме того, в зоне S1 имеются верхние направляющие 70, по которым перемещается верхняя ветвь приводной цепи 36. Аналогичным образом и в нижней зоне S2 имеются нижние направляющие 71, по которым перемещается нижняя ветвь приводной цепи 36.
Сбоку на противоположном конце ступени 37 расположена ось 64 поворота подступенка, с которой соединен несущий конец подступенка 38. На свободном конце подступенка 38 по обеим его сторонам расположены лежащие на одной оси направляющие ролики 55. Кроме того, рядом с направляющими роликами 55 расположены сдвинутые по ширине ближе к центру подступенка ролики 61, диаметр которых меньше диаметра роликов 55.
На другом конце ступени 37 имеется опущенный вниз упор 63. Этот упор 63 предназначен для ограничения угла поворота подступенка 38, который, находясь в рабочем (висячем) положении, упирается в этот упор своим верхним краем 62. Наличие такого упора обеспечивает фиксацию свободно свисающего вниз подступенка в рабочем (закрытом) положении.
На оси 64 у несущего края подступенка 38 закреплены шестерни 65. Эти шестерни находятся в зацеплении с кулачковым зубчатым сектором 66, расположенным рядом с шестерней 65. К сектору 66 прикреплен рычаг 49, обращенный при закрытом подступенке 38 вниз к свободному концу ступени под определенным углом. На расположенном на верхнем этаже 32 конце рамы 41 имеется ролик 68, взаимодействующий с рычагом 49 сектора 66. Когда ступень 37 подходит к верхнему этажу и движется горизонтально вправо по фиг.11, рычаг 49 упирается в ролик 68 и при дальнейшем перемещении ступени вправо сектор 66 поворачивается по часовой стрелке в положение, показанное на фиг.12. При таком повороте сектора 66 находящаяся в зацеплении с сектором шестерня 65 и соединенный с ней подступенок 38 поворачиваются против часовой стрелки в положение, в котором подступенок оказывается поднятым вверх к ступени 37 и располагается почти параллельно ей. Такой механизм обеспечивает надежное перемещение подступенка 38 в нерабочее сложенное положение непосредственно перед его попаданием в зону S3 поворота цепи.
На несущей раме 41 под верхней направляющей 60 ступеней имеется отстоящая от нее по вертикали на некоторое расстояние верхняя направляющая 56 подступенка. Аналогичным образом и под нижней направляющей 69 ступени имеется нижняя направляющая 57 подступенка, которая, однако, расположена ближе, чем верхняя, к направляющей ступеней. Когда ступень 37 перемещается в зоне S5, соединенный с ней подступенок 38 своим роликом 55, катящимся по направляющей 56, удерживает лицевую рабочую поверхность 48 ступени в горизонтальном положении и одновременно закрывает зазор между ступенями. Когда ступень 37 перемещается в нижней зоне S2, подступенок 38, ролик 55 которого перемещается по нижней направляющей 57, поворачивается и находится в притянутом снизу к ступени сложенном, или нерабочем, положении, а направляющие ролики 59, направляющие 69, ролик 55 и нижняя направляющая 57 образуют на пути S2 обратного движения набора ступеней 37 устройство для перемещения набора ступеней 37 с постоянно обращенными вверх лицевыми рабочими поверхностями и с остающимися в сложенном положении соединенными с ними подступенками 38. Таким образом, при том, что на транспортном участке S5 верхней прямой зоны S1 подступенки 38 постоянно находятся в висячем (закрытом) положении, в нижней зоне S2 они перемещаются в сложенном (притянутом к ступени) положении, что, как очевидно, позволяет уменьшить расстояние между верхней зоной S1 эскалатора и его нижней зоной S2 и создает возможность выполнения эскалатора 30 более компактным с заметно уменьшенными по высоте размерами.
Когда подступенок 38 в закрытом положении перемещается в транспортной зоне S5, его меньший по диаметру ролик 61 упирается в направляющую 50, расположенную над параллельной ей направляющей 56. Тем самым в транспортной зоне S5 предотвращается возможность поворота свободно висящего подступенка в направлении ступени, и ступени постоянно остаются в этой зоне расположенными горизонтально с обращенными вверх лицевыми поверхностями 48.
На фиг.13 в виде сбоку показан расположенный на верхнем этаже 32 участок эскалатора 30 с удаленной боковой стенкой 42. Рядом с верхней звездочкой 34 расположены два направляющих кулачковых ротора 75, разнесенных между собой по ширине эскалатора и вращающихся на валу 76, ось L1 которого параллельна осям поворота верхней звездочки 34 и нижней звездочки 35.
Направляющий кулачковый ротор 75 расположен в том месте, где кончаются верхние 56 и нижние 57 направляющие подступенка и верхние направляющие 60 ступени, и является частью механизма переноса ступени 37 с одной ветви цепи на другую. Направляющий кулачковый ротор 75 связан с расположенной с ним на одной оси звездочкой 51. Эта звездочка и звездочка 53, соосная с верхней звездочкой 34, соединены друг с другом цепью 52, и поэтому кулачковый ротор 75 вращается с той же скоростью и в том же направлении, что и звездочка 34. Направляющий кулачковый ротор 75 имеет два приемных выступа 77 и 78, расположенных симметрично относительно оси L1 вращения. При перемещении ступени 37 по окружности в зоне S3 из верхней прямой зоны S1 в нижнюю прямую зону S2 приемные выступы 77 и 78 поддерживают расположенные на свободном конце подступенка направляющие ролики 55 и удерживают подступенок 38 в нерабочем (сложенном) положении, обеспечивая возможность ступени вместе с притянутым к ней подступенком свободно проходить из верхней зоны S1 эскалатора в его нижнюю зону S2
На фиг. 14 в увеличенном масштабе показан участок эскалатора с направляющим кулачковым ротором 75 в тот момент, когда ступень 37 приближается к нижней зоне S3. Направляющий кулачковый ротор 75 имеет два радиально расположенных приемных выступа 77 и 78 с опорными поверхностями 79. Опорная поверхность 79 наклонена в направлении, противоположном направлению С вращения кулачкового ротора (по часовой стрелке на фиг.14) под углом θ1 от условной плоскости 73, проходящей через ось L1 и конечные точки 82 выступов 77 и 78. Предпочтительно, чтобы угол θ1 лежал в пределах от 0 до 30o. При угле θ1, меньшем 0o, при подходе ступени в нижнюю зону S3 подступенок не будет удерживаться в сложенном положении, а при угле θ1, большем 30o, свободный конец подступенка, повернутого в (нерабочее) сложенное положение, до попадания в нижнюю зону S3 упрется в угловую часть опорной поверхности 79 по линии, направленной к оси L1 поворота.
Траектория движения направляющего ролика 55 подступенка 38, упирающегося в опорную поверхность 79 направляющего кулачкового ротора 75 при переходе подступенка 38 из зоны S1 в зону S2, показана на чертеже в виде окружности 83. Диаметр D1 этой окружности приблизительно равен диаметру D2 звездочки 34, и поэтому подступенок 38 будет перемещаться из зоны S1 в зону S2, оставаясь постоянно в нерабочем (сложенном) положении.
Обращенный к верхнему этажу 32 передний конец 57а нижней направляющей 57 подступенка 38 для направления роликов 55 в зоне S2 выполнен в виде дуги с углом θ2, центр которой лежит на оси L1 вращения направляющего кулачкового ротора 75. Угол θ2 предпочтительно выбрать в диапазоне от 30o до 90o, более предпочтительно равным 52o. При угле θ2, меньшем 30o, когда ступень 37 опускается в зону S2, направляющий ролик 55 подступенка 38 может с шумом столкнуться с направляющей 57. При угле θ2, большем 90o, конец 57а направляющей 57 становится слишком длинным и поэтому недостаточно прочным.
Предлагаемое в изобретении направляющее устройство подступенка состоит из передней части 57а нижней направляющей 57 и описанного выше направляющего кулачкового ротора 75.
Расстояние а1 между осью L1 направляющего кулачкового ротора 75 и осью L2 звездочки 34 равно расстоянию а2 между осью 58 крепления ступени 37 к цепи и осью вращения направляющего ролика 55 подступенка 38, когда он находится в сложенном положении.
Когда ось 58 попадает в нижнюю зону S3, подступенок 38 поворачивается зубчатым сектором 66 в сложенное положение. В этот момент опорная поверхность 79 выступа 77 направляющего кулачкового ротора 75 оказывается расположенной таким образом, что в нее упирается ролик 55 подступенка 38. Поэтому, когда направляющая пластина 67 рычага 49, соединенного с зубчатым сектором 66, сходит с ролика 68, а подступенок 38 стремится опуститься вниз и повернуться в закрытое положение, его нижняя поверхность упирается в опорную поверхность 79 выступа 77, который препятствует повороту подступенка в сложенное положение.
Ниже со ссылками на фиг.15-21 описана последовательность работы направляющего кулачкового ротора 75.
На фиг.15 показано положение направляющего кулачкового ротора в тот момент, когда звездочка 34 повернута на угол α=57,6o от начального положения, в котором передний конец ступени 37 подходит к верхней начальной точке нижней зоны S3. В это время направляющий кулачковый ротор 75 также повернут из того же самого исходного положения на такой же угол, и ступень 37 удерживается приблизительно в горизонтальном положении, а подступенок 38 остается в сложенном положении. Достигается это за счет того, что повороту подступенка 38 вокруг оси 64 и изменению его углового положения в направлении закрытия препятствует опорная поверхность 79 выступа 77.
На фиг. 16 показано положение деталей направляющего устройства в момент поворота верхней звездочки 34 из исходного положения на угол α, равный 72o. На фиг. 17 показано положение деталей направляющего устройства в момент поворота верхней звездочки из исходного положения на угол α, равный 86,4o. На фиг.18 показано положение деталей направляющего устройства в момент поворота верхней звездочки из исходного положения на угол α, равный 100,8o. Во всех этих положениях, соответствующих определенному углу поворота звездочки 34, угол поворота из исходного положения кулачкового направляющего ротора 75 будет таким же, что и угол поворота звездочки, и во всех этих положениях ступень 37 будет находиться приблизительно в горизонтальном положении с обращенной вверх рабочей поверхностью и сложенным подступенком 38.
На фиг.19 показано положение при повороте звездочки 34 на угол α, равный 115,2o. В этот момент ролик 55 подступенка 38 оказывается расположенным непосредственно перед передним концом 57а нижней направляющей 57 подступенка.
На фиг. 20 показано положение при повороте звездочки 34 из исходного положения на угол α, равный 129,6o. В этот момент ролик 55 полностью сошел с выступа 77 кулачкового ротора 75 и поддерживается снизу передним концом 57а направляющей 57.
На фиг.21 показано положение при повороте звездочки из исходного положения на угол α=144o. В этот момент ролик 55 лежит на направляющей 57, а перед опорной поверхностью 79 второго приемного выступа 78 кулачкового ротора, симметричного первому выступу относительно оси L1, находится ролик 55 следующей за расположенной под ней ступени 37. При дальнейшем повороте звездочки 34 второй выступ 78 приходит во взаимодействие с направляющим роликом 55 следующей ступени 37 и занимает описанное выше положение, изображенное на фиг. 14. Работающее таким образом направляющее устройство с кулачковым ротором 75, вращающимся с той же скоростью, что и верхняя звездочка 34, надежно переводит каждый подступенок 38 следующих друг за другом ступеней 37 из верхней прямой зоны эскалатора в его нижнюю прямую зону S2.
Поскольку передний конец 57а направляющей 57 имеет форму дуги с центром, расположенным на оси L1 поворота направляющего кулачкового ротора 75, ротор 75 плавно перемещает поворачивающийся вокруг оси L1 ролик 55 по этой дуге. Такое плавное перемещение подступенка 38 предотвращает появление шума и обеспечивает плавное движение ступеней 37 по круговой траектории при их переходе с одной ветви эскалатора на другую.
На фиг.22 показан вид сбоку расположенной на нижнем этаже 31 части эскалатора 30 с удаленной стенкой 42. Нижние направляющие 57 подступенка имеют наклонные, расположенные на концах участки 90 с подъемом в направлении стрелки В. Под этими наклонными участками 90 нижних направляющих 57 подступенка расположены два направляющих ролика 94. Направляющие ролики 94 разнесены друг от друга в поперечном направлении между наклонными концевыми участками 90 нижних направляющих 57 подступенка, которые также отстоят друг от друга в направлении ширины эскалатора. Направляющие ролики 94 подступенка могут свободно вращаться вокруг поперечной оси и расположены с нижней стороны подступенка 38, который перемещается вдоль расположенных под ним на концах направляющей наклонных участков 90.
Эти наклонные участки 90, расположенные на концах направляющих 57, и направляющие ролики 94 образуют направляющий движение подступенка узел 95.
Над обращенным вверх наклонным концом 90 направляющей 57 находится первая направляющая 91 (фиг.23) подступенка, высота подъема которой увеличивается в направлении стрелки А. Первая направляющая 91 подступенка, расположенная между наклонным концом 90 нижней направляющей 57 подступенка и горизонтальной направляющей 92 подступенка 38, предназначена для направления подступенка 38, который при перемещении в зоне S1 остается сложенным. Первая направляющая 91 состоит из несущей детали 97, находящейся снаружи от цепи 36, соединительной направляющей 98, расположенной внутри цепи 36 и соединенной с горизонтальной направляющей 92, и откидной направляющей 96, которая может менять угол наклона и опирается, будучи расположена между ними, на несущую деталь 97 и соединительную направляющую 98.
Откидная направляющая 96 расположена на пути движения оси 58, которой ступень 37 крепится к цепи. Поэтому для того, чтобы она не мешала движению оси 58 при движении ступени 37 из нижней зоны S2 в верхнюю зону S1, несущий конец откидной направляющей 96 установлен с возможностью поворота относительно поперечной оси на верхнем конце несущей детали 97, а ее свободный конец опирается на задний (левый по фиг.22) конец соединительной направляющей 98 таким образом, что при прохождении оси 58 откидная направляющая 96 поворачивается, освобождая проход для оси 58 ступени 37 между откинутой вверх направляющей 96 и соединительной направляющей 98, а после прохождения оси 58 откидная направляющая 96 поворачивается в исходное положение, закрывая окно для прохода оси ступени.
Откидная направляющая 96 изготовлена из синтетического материала, например из акриловой смолы, и поэтому при ударе ее о металлическую направляющую 98 не возникает никакого шума.
Обращенные вверх и состыкованные вместе поверхности несущей детали 97, откидной направляющей 96 и соединительной направляющей 98 составляют первую направляющую 91, образуя сплошную плавную поверхность, по которой направляющий ролик 55 подступенка 38 поднимается к горизонтальной направляющей 92. Нижний конец 97а (слева по фиг.23) несущей детали 97 первой направляющей 91 подступенка расположен выше и правее (в направлении стрелки А) ролика 94, а расстояние b1 между ним и наклонным концом 90 нижней направляющей 57 подступенка несколько больше наружного диаметра D3 ролика 55.
Поэтому ролик 55 может пройти под первой направляющей 91 подступенка и, изменив направление движения, как более подробно описано ниже, легко подняться на несущую деталь 97. Кроме того, передняя часть 98а (справа по фиг.23) соединительной направляющей 98 первой направляющей 91 подступенка плавно переходит в горизонтальную направляющую 92, которая удерживает подступенок 38 в сложенном положении и направляет ступень 37, когда она движется по горизонтальному участку зоны S1 на нижнем этаже 31. Передняя часть 98а соединительной направляющей 98 расположена выше и правее (по фиг.23) в направлении стрелки А оси 40 нижней звездочки 35.
Как уже было отмечено выше, первая направляющая 91 подступенка и направляющее устройство 95, расположенные в том месте, где между нижней направляющей 57 подступенка и верхней направляющей 60 ступени имеется зазор, вместе образуют механизм переноса, направляющий проходящие между ними ступени 37.
Передний конец 92а горизонтальной направляющей 92 (справа по фиг.23) плавно переходит во вторую направляющую 93 подступенка. Эта вторая направляющая 93 подступенка имеет наклонный участок, опускающийся вниз в направлении стрелки А. При движении ступени 37 в направлении стрелки А направляющий ролик 55, расположенный на свободном конце подступенка 38, движется по этому опускающемуся вниз наклонному участку, и подступенок 38 плавно поворачивается в закрытое положение непосредственно перед попаданием ступени в транспортную зону S5. Затем по ходу движения ступени находится направляющая 99 (см. фиг. 23), которая расположена параллельно напротив второй направляющей 93 подступенка и служит для направления малого ролика 61, расположенного на свободном конце подступенка 38, а также обеспечивает дальнейшее перемещение подступенка на коротком участке пути в сложенном положении.
Ниже со ссылками на фиг.22-24 описано движение подступенка 38 при перемещении ступени 37 из нижней прямой зоны S2 в верхнюю прямую зону S1. Когда ступень 37, движущаяся на нижнем этаже 31 горизонтально в направлении стрелки В в нижней прямой зоне S2, входит в верхнюю зону S4 и начинает подниматься при огибании цепи звездочки 35, направляющий ролик 55 подступенка 38 движется по наклонному участку 90 направляющей 57 подступенка, который, поднимаясь, остается в сложенном положении.
Когда направляющий ролик 55 в процессе вращения нижней звездочки 35 движется по наклонному концу 90 и проходит под несущей деталью 97, ступень 37 перемещается по нижней ветви эскалатора в направлении стрелки В, и затем по мере дальнейшего вращения нижней звездочки 35 наружная поверхность 38а подступенка 38 упирается в наружную поверхность направляющего подступенок ролика 94 (см. фиг.24), в результате чего направляющий ролик 55 сходит с наклонного конца 90 нижней направляющей 57 подступенка и поднимается вверх.
При дальнейшем повороте нижней звездочки 35 конец ступени 37 доходит до середины зоны S4, и ступень переходит с нижней ветви на верхнюю, меняя направление движения с В на А, а ролик 55, как показано на фиг.24, поднимается на несущую деталь 97 первой направляющей 91 подступенка. При последующем движении ступени 37 в направлении стрелки А направляющий ролик 55 подступенка 38 катится по поверхности откидной направляющей 96 и соединительной направляющей 98.
В тот момент, когда ролик 55 только начинает подниматься на несущую деталь 97 первой направляющей 91, угол θ3 между прямой, соединяющей ось направляющего ролика 55 и ось 64 поворота ступени 37, и поверхностью несущей детали 97 должен предпочтительно находиться в пределах от 0o до 90o. В тех же пределах от 0o до 90o должен находиться и угол θ4 между той же прямой, соединяющей ось направляющего ролика 55 и ось 64 поворота ступени 37, и поверхностью ступени.
Если в момент соприкосновения направляющего ролика 55 с несущей деталью 97 углы θ3 и θ4 будут находиться в указанных пределах, то подступенок 38 будет надежно подниматься вверх по поверхности несущей детали 97 первой направляющей 91 подступенка, оставаясь в сложенном положении, при одновременном перемещении конца ступени 37 из середины зоны S4 в верхнюю зону S1 с опирающимся на несущую деталь 97 направляющим роликом 55.
При движении направляющего ролика 55 по первой направляющей 91 подступенка вверх в направлении оси 40 вращения нижней звездочки 35 и затем по верхней ветви эскалатора в направлении стрелки А подступенок 38, оставаясь в сложенном положении, свободно проходит мимо оси 40 вращения нижней звездочки 35 и обеспечивает плавное перемещение ступени 37 без толчков и ударов.
При дальнейшем перемещении ступени 37 в направлении А в зоне S1 направляющий ролик 55 движется по горизонтальной направляющей 92 подступенка, затем опускается вниз по второй направляющей 93 подступенка, после чего малый ролик 61 попадает на направляющую 99, и при движении ступени 37 по верхней ветви эскалатора в направлении А направляющий ролик 55 обеспечивает плавный поворот подступенка 38 из нерабочего положения в рабочее.
Такой предлагаемый в изобретении механизм плавного движения подступенка исключает возможность резкого падения подступенка из сложенного (нерабочего) положения в закрытое (рабочее) положение, которое могло бы привести к удару верхнего конца 62 подступенка о выступ 63 ступени 37, и обеспечивает плавное перемещение всех ступеней 37 эскалатора. При этом, как уже было описано выше, благодаря наличию второй направляющей 93 подступенок 38 всегда попадает в транспортную зону S5 в повернутом в закрытое рабочее положение виде.
Все преимущества описанного выше эскалатора, в котором находящиеся в рабочем положении ступени 37 поднимаются вверх по верхней ветви цепи в зоне S1 с нижнего этажа 31 на верхний этаж 32 и который лишь иллюстрирует, но не ограничивает объем изобретения, в полной мере относятся и к эскалатору, у которого находящиеся в рабочем положении ступени опускаются вниз с верхнего этажа на нижний.
На фиг. 25 в виде сбоку показан четвертый вариант выполнения предлагаемого в изобретении эскалатора 100. Отдельные узлы и детали этого эскалатора обозначены теми же позициями, что и эскалатора, показанного на фиг.1-24.
Лестница 33, на которой смонтирован эскалатор 100, имеет расположенную между нижним 31 и верхним 32 этажами горизонтальную площадку 101. Сам эскалатор 100 имеет плоский горизонтальный участок 101, расположенный между этажами на плоской площадке лестницы. Приводная цепь 36, которая проходит вдоль имеющей горизонтальную площадку 101 лестницы 33, перемещается внутри несущей рамы 41, которая также проходит по всей длине лестницы.
И в этом варианте изобретения перемещающие людей с нижнего этажа на верхний ступени 37, которые перемещаются приводной цепью 36, постоянно движутся по замкнутой траектории между нижним и верхним этажами.
На фиг. 26 в виде сбоку показана часть выполненного по пятому варианту эскалатора 105, расположенная на верхнем этаже 32. Отдельные узлы и детали, показанные на этом чертеже, обозначены теми же позициями, что и на фиг.8-24.
В эскалаторе 105 на верхнем этаже 32 рядом с верхней звездочкой 34 расположено направляющее устройство 106, предназначенное для направления ролика 55, расположенного на свободном конце подступенка 38, и ступени 37 при ее движении со сложенным подступенком 38 в зоне S3 перехода из верхней зоны S1 в нижнюю S2.
На фиг.27 в увеличенном масштабе в виде сбоку показан участок эскалатора в зоне расположения направляющего устройства 106. Промежуточные положения оси 58 ступени 37, а также направляющего ролика 55 показаны на этом чертеже условно штрих-пунктирными линиями и обозначены соответственно позициями 58a-58k для оси ступени и позициями 55a-55k для направляющего ролика.
У переднего конца верхней направляющей 56 подступенка, расположенного в верхней зоне S1, в которой ступени движутся по прямой, находится направляющая 106, имеющая наклонную поверхность 109 с подъемом в направлении стрелки А, по которой движется направляющий ролик 55 ступени 38 и которая предназначена для поворота подступенка в нерабочее положение. При перемещении в верхней ветви S1 эскалатора в направлении стрелки А непосредственно перед входом в зону S3 подступенок 38 переводится в сложенное положение роликом 68. В это время направляющая 106 подступенка дополнительно направляет движение ролика 55 и удерживает подступенок 38 в нерабочем сложенном положении после того, как зубчатый сектор 66 ступени 37 отходит от ролика 68.
Направляющее устройство 106 состоит из верхней 107 и нижней 108 направляющих, причем верхняя направляющая 107, которая расположена внутри траектории движения ролика 55 подступенка 38, имеет направляющую поверхность 107а, по которой движется опирающийся на нее сверху направляющий ролик 55 и которая удерживает подступенок в сложенном положении, в то время как расположенная на одном конце подступенка 38 ось 58 ступени 37, находящейся практически в горизонтальном положении, перемещается с верхнего конца к середине переводной зоны S3.
Нижняя направляющая 108 расположена вне траектории движения ролика 55 подступенка. Когда расположенная на конце ступени 37 ось 58 движется из середины зоны S3 в нижнюю зону S2, в нижнюю направляющую 108 упирается расположенный над ней ролик 55 подступенка 38, и поэтому подступенок 38 надежно удерживается в сложенном положении при сохранении приблизительно горизонтального положения ступени 37.
Нижняя направляющая 108 имеет выполненную в виде дуги деталь 113 и расположенный на ее нижнем конце направляющий элемент 110, который примыкает к нижнему концу выполненной в виде дуги детали 113 и наклонен к направляющей 57 подступенка и может свободно поворачиваться на поперечной оси, которая закреплена на обратной стороне выполненной в виде дуги детали 113 (справа по фиг.21), при этом внутренняя поверхность 113а выполненной в виде дуги детали 113 обращена вверх, а поверхность 110а направляющего элемента 110, которая также обращена вверх, образует нижнюю направляющую поверхность нижней направляющей 108. Кроме того, для того чтобы направляющий ролик 55, движущийся по направляющей 108, не мог подниматься вверх, против направляющей 108 установлен специальный ограничитель 112.
Для направления ролика 55 подступенка в нижней зоне S2 передний конец 111 (справа по фиг.27) нижней направляющей 57 подступенка 38 выполнен с подъемом в направлении нижнего конца направляющего элемента 110.
Ниже рассмотрено, каким образом происходит движение подступенка 38 в нижней части зоны S3 при опускании ступени 37 к нижнему этажу.
При вращении верхней звездочки 34 ступень 37 движется горизонтально в направлении стрелки А на верхнем этаже 32, и подступенок 38 переводится направляющим роликом 68 в сложенное положение непосредственно перед тем, как ось 58 попадет в нижнюю зону S3. На фиг.27 положение направляющего ролика 55 в этот момент обозначено как 55с.
При дальнейшем вращении верхней звездочки 34 ось 58 ступени 37 движется в зоне S3 по дуге окружности к центру зоны S3, направляющий ролик 55 катится по очерченной дугой окружности поверхности 107а верхней направляющей 107, а ступень 37 перемещается в этой зоне в приблизительно горизонтальном положении вместе со сложенным подступенком 38. По мере дальнейшего вращения верхней звездочки 34 направляющий ролик 55 переходит с верхней направляющей 107 на выполненную в виде дуги окружности деталь 113 нижней направляющей 108. Положение направляющего ролика 55 в этот момент обозначено на чертеже как 55f.
При движении оси 58 вниз из середины зоны S3 к нижней зоне S2, в которой ступени движутся как описано выше, направляющий ролик 55 катится по выполненной в виде дуги окружности детали 113. Все это время ступень 37 остается горизонтальной, а подступенок 38 - сложенным.
При дальнейшем движении направляющий ролик 55 переходит к нижнему концу детали 113, а затем с нижнего конца устройства 110 направляющей 108 на передний конец 111 нижней направляющей 57 подступенка.
Поскольку направляющее устройство 110 может, как уже было отмечено выше, поворачиваться, его можно отрегулировать таким образом, чтобы переход направляющего ролика 55 с нижнего конца направляющей 113 на переднюю часть 111 нижней направляющей 57 подступенка происходил плавно.
Недостаток, присущий существующим конструкциям эскалаторов, в которых расположенный на нижнем конце свисающего подступенка направляющий ролик опускается вниз при переходе ступеней на нижнюю ветвь S2 с ударом и шумом и движение ступеней происходит не плавно, устраняется в предлагаемой в настоящем изобретении конструкции за счет наличия в ней направляющего подступенок устройства 106 и плавного, как описано выше, перемещения сложенного подступенка при его переходе из верхней зоны S1 в нижнюю зону S2, в которых ступени эскалатора движутся по прямой.
Описанные выше различные варианты конструкции предлагаемого в изобретении эскалатора предназначены для установки на существующих лестницах, однако их применение этим не ограничивается и изобретение может быть осуществлено в новых эскалаторах, предназначенных, например, для установки на любой наклонной поверхности в домах, различных зданиях или в других условиях.
В шестом варианте выполнения настоящего изобретения предлагается не обычный эскалатор для перемещения людей, а движущаяся дорожка 200, изображенная на фиг.28.
Такая движущаяся дорожка 200 монтируется на горизонтальном полу и имеет расположенную ниже уровня пола несущую раму 201, две ведущие звездочки 203, установленные на одном конце рамы на отдельных разнесенных в поперечном направлении осях и приводимые во вращение приводом 202, и две ведомые звездочки 204, установленные на общей оси на другом конце рамы.
На звездочки 203 и 204 надеты две натянутые между ними бесконечные приводные цепи 205, охватывающие звездочки 203 и 204. Между этими бесконечными цепями расположен набор соединенных с ними ступеней 206. Между двумя парами звездочек 203 и 204 на траектории поступательного движения ступеней расположены верхние направляющие 207, удерживающие ступени 206 в горизонтальном положении. Кроме того, на траектории возвратного движения ступеней 206 между двумя парами звездочек 203 и 204 имеются нижние направляющие 208, препятствующие ударам ступеней о нижнюю часть несущей рамы 201.
Кроме того, такая движущаяся дорожка имеет расположенные рядом со звездочками 203 и 204 описанные выше направляющие устройства, позволяющие изменять направление движения ступеней 206 с постоянно обращенными вверх лицевыми поверхностями.
Такая конструкция исключает необходимость в использовании звездочек большого диаметра, предназначенных для перемещения ступеней 206 с верхней ветви на нижнюю с поворотом на 180o, а тем самым позволяет уменьшить высоту несущей рамы 201 и свести к минимуму объем строительных работ, связанных с сооружением частично расположенной под полом движущейся дорожки.
Предлагаемое в этом варианте выполнения настоящего изобретения устройство типа эскалатора позволяет, как и рассмотренные выше варианты, уменьшить до минимума размеры пространства, необходимого для размещения в нем несущей рамы 201, и обеспечивает плавное, без толчков и ударов, движение ступеней при изменении направления их движения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОСНОВАНИЕ СТУПЕНИ ИЛИ ПЛАТФОРМЫ ДЛЯ ТЕЛЕЖЕК ДВИЖУЩЕГОСЯ УСТРОЙСТВА, ТЕЛЕЖКИ И ДВИЖУЩЕЕСЯ УСТРОЙСТВО | 2008 |
|
RU2499761C2 |
| СРЕДСТВО И СПОСОБ ПРОИЗВОДСТВА СТРОИТЕЛЬНОЙ ПАНЕЛИ | 1995 |
|
RU2140851C1 |
| СТУПЕНЬ ДЛЯ ЭСКАЛАТОРА | 2016 |
|
RU2730056C2 |
| Механическая лестница | 1989 |
|
SU1684223A1 |
| УКАЗАТЕЛЬ, РАЗМЕЩАЕМЫЙ НА УСТРОЙСТВЕ ДЛЯ ТРАНСПОРТИРОВАНИЯ ПАССАЖИРОВ И НА ЭСКАЛАТОРЕ, ЗАМЕНЯЮЩАЯ СТУПЕНЬ УСТРОЙСТВА, СПОСОБ МОДИФИЦИРОВАНИЯ И ИЗГОТОВЛЕНИЯ СТУПЕНИ УСТРОЙСТВА | 1992 |
|
RU2143995C1 |
| Механическая лестница | 1987 |
|
SU1495258A2 |
| СПОСОБ И УСТРОЙСТВО ФОРМИРОВАНИЯ ЛЕСТНИЦЫ | 2007 |
|
RU2443835C2 |
| ЭСКАЛАТОР С АВАРИЙНЫМИ НАПРАВЛЯЮЩИМИ СРЕДСТВАМИ | 2007 |
|
RU2416568C2 |
| Механическая лестница | 1984 |
|
SU1377237A2 |
| ВИНТОВОЙ ЭСКАЛАТОР | 1995 |
|
RU2107018C1 |



Изобретение относится к области транспорта, в частности к транспортерам для перемещения людей. Изобретение касается вариантов выполнения транспортера. В каждом из вариантов выполнения транспортера имеется набор ступеней, соединенных в бесконечный ряд для перемещения по замкнутой траектории внутри несущей рамы, установленной между нижним и верхним этажами, и предусмотрено устройство для перевода соединенного с каждой из ступеней подступенка в сложенное положение у нижней поверхности ступени. Варианты выполнения транспортера отличаются выполнением и размещением направляющих устройств и устройств для перевода подступенка в сложенное положение. Изобретение обеспечивает уменьшение высоты приводного отсека со стороны обратной ветви транспортера. 6 с. и 5 з.п.ф-лы, 28 ил.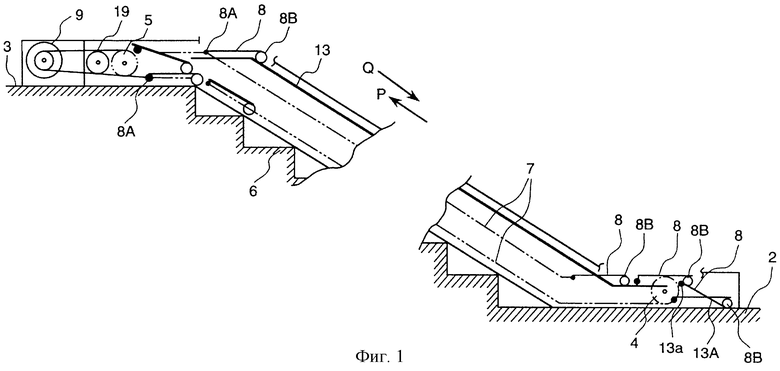
Приоритет по пунктам:
17.06.1997 - по пп.1-3, 8, 9;
03.12.1997 - по пп.4-7, 10, 11.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| ЭКСКАЛАТОР ДЛЯ МЕТРО | 1991 |
|
RU2011627C1 |
| СТУПЕНЬ ЭСКАЛАТОРА | 1991 |
|
RU2036831C1 |

