Предложение относится к радиотехнике и более конкретно к вертолетным импульсно-доплеровским радиолокационным системам (РЛС).
Известны импульсные некогерентные РЛС кругового или секторного обзора (см., например, Радиотехнические системы / Под ред. проф. Ю.М. Казаринова. - М. : Высшая школа, 1990, с.194-197), позволяющие обнаруживать цели и определять их дальность D и азимут α в пределах зоны обзора, ограниченной максимальной дальностью и шириной диаграммы направленности антенны в вертикальной плоскости. По азимуту антенна вращается с постоянной скоростью, производя за время одного оборота круговой обзор. Принимаемые отраженные сигналы воспроизводятся на экране индикатора кругового обзора, развертка которого вращается синхронно с вращением антенны.
Момент излучения зондирующего импульса антенной определяет начало развертки по дальности, а азимутальное положение развертки совмещается с положением оси луча антенны. Отраженным от цели сигналом после обработки и усиления подсвечивают точку развертки на индикаторе, соответствующую координатам цели. Отраженные сигналы принимаются, пока цель остается в пределах луча антенны по азимуту αаз.
Согласованная во времени работа всех элементов РЛС обеспечивается синхронизатором, состоящим из задающего генератора, стабильные колебания которого используются для формирования импульсов запуска передатчика и развертки дальности. Через циркулятор (антенный переключатель), защищающий вход приемника на время передачи импульсов, формируемых передатчиком, высокочастотные колебания посылаются в антенну и излучаются ею в направлении цели. Принятые антенной отраженные от цели сигналы, пройдя через циркулятор, усиливаются и детектируются в приемнике и в виде импульсов поступают на индикатор для отображения метки цели, а также с помощью устройства первичной обработки фильтруются от помех и после измерения и преобразования в цифровую форму азимута и дальности цели передаются в ЭВМ для вторичной обработки, состоящей в построении траектории движения цели по отметкам (отсчетам), полученным при нескольких последовательных обзорах, т.е. за несколько оборотов антенны.
Недостатками таких РЛС являются, во-первых, большое время получения первого отсчета координат цели, вошедшей в зону обзора РЛС, т.е. большое время обнаружения новой цели, что имеет особо важное значение при обнаружении высокоскоростных целей из-за возможности их пропуска, во-вторых, недостаточная точность слежения за траекторией и скоростью движения целей особенно при их маневрировании. Основным фактором, от которого зависит время обнаружения цели, является период обзора РЛС, минимальная величина которого определяется дальностью действия и характеристиками обнаружения РЛС и составляет 5-10 с при круговом обзоре. Уменьшение периода обзора возможно путем использования секторного обзора, однако при этом невозможно контролировать пространство вне этого сектора, что в большинстве случаев недопустимо. Основными факторами, влияющими на точность слежения за траекторией и скоростью движения целей, являются, во-первых, количество и точность измеряемых радиолокационной системой пространственных параметров движения цели непосредственно при проведении отсчета, таких как координаты и скорость цели, во-вторых, темп обновления этой информации, определяемый периодом обзора РЛС. В указанных РЛС невозможно определение параметров движения цели по одной ей отметке, так как в момент получения отметки измеряются только координаты местоположения (азимут, дальность) цели. Для обеспечения слежения за движением цели используется несколько последовательных во времени отсчетов координат, по которым оценивается траектория и скорость движения цели.
Недостаток, связанный с недостаточной точностью слежения за траекторией движения и скоростью цели, частично устраняется в известной вертолетной импульсно-доплеровской РЛС "Лонгбоу" фирмы Локхид Мартин за счет увеличения числа одновременно измеряемых РЛС параметров движения цели, а именно дополнительным измерением радиальной скорости цели одновременно с измерением ее координат. Эта РЛС предназначена для вертолета AH-64D Longbow Apache (рекламный проспект Longbow System Description, фирма Lockheed Martin, 1995) и содержит антенну, соединенную с циркулятором, выход которого связан с первым входом приемника, а вход с выходом передатчика, вход которого подключен к первому выходу синхронизатора, второй выход синхронизатора соединен со вторым входом приемника, выход приемника соединен через последовательно соединенные синхронный детектор и аналого-цифровой преобразователь с процессором обработки сигналов, первый и второй выходы которого соединены соответственно с индикатором и со входом процессора данных, выходы которого соединены соответственно со вторым входом процессора обработки сигналов, входом синхронизатора и с комплексом бортового радиоэлектронного оборудования вертолета, а третий выход синхронизатора соединен со вторым входом синхронного детектора.
Антенна такой РЛС вращается по азимуту, производя круговой или секторный обзор, при этом за один обзор рабочего сектора происходит обнаружение целей и определение их дальности, азимута и радиальной скорости.
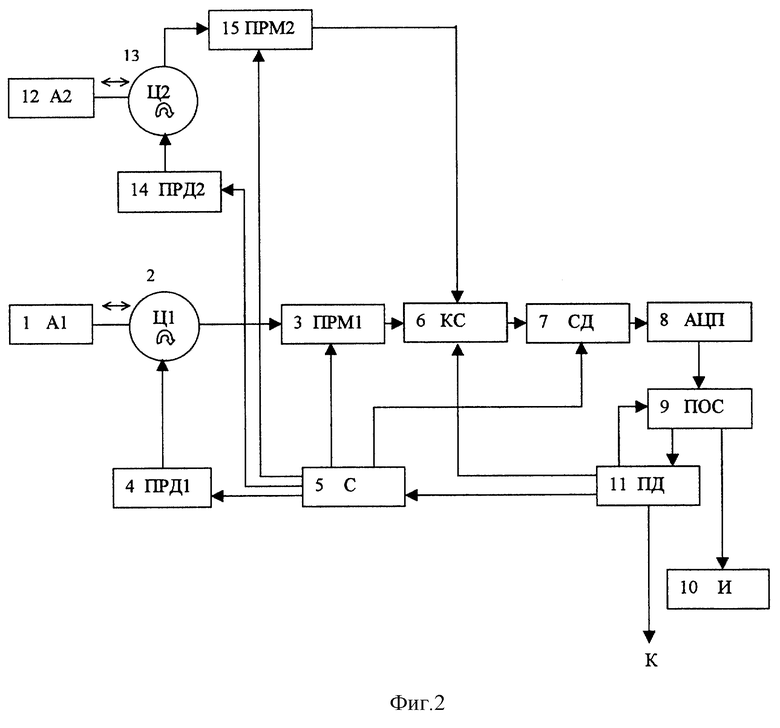
Синхронизатор С обеспечивает согласованную работу составных частей РЛС (фиг. 1). Он содержит задающий генератор и схемы формирования высокостабильных колебаний миллиметрового диапазона волн для запуска передатчика импульсных когерентных сигналов (ПРД), а также опорных сигналов для приемника (ПРМ) и синхронного детектора (СД). С выхода передатчика (ПРД) высокочастотные колебания через циркулятор (Ц) подаются в антенну (А) и излучаются через нее. Момент излучения зондирующего импульса при каждом положении антенны определяет начало шкалы отсчета дальности. Отраженные от цели сигналы принимаются антенной и через циркулятор подаются на вход приемника (ПРМ), усиливаются и передаются в синхронный детектор (СД), откуда они после детектирования поступают в аналого-цифровой преобразователь (АЦП), с выхода которого они в цифровом виде поступают на процессор обработки сигналов (ПОС), где производится их цифровая обработка и подготовка к виду, удобному для отображения на индикаторе (И). С другого выхода процессора обработки сигналов цифровые данные о параметрах цели, полученные в каждом обзоре, передаются в процессор данных (ПД) для слежения за трассами их движения по нескольким периодам обзора. Процессор данных управляет работой синхронизатора и процессора обработки сигналов в различных режимах работы РЛС, а также обеспечивает информационные связи РЛС с комплексом (К) бортового радиоэлектронного оборудования вертолета.
По величине доплеровского сдвига принятого сигнала определяется радиальная скорость движущейся цели по результатам одного отсчета, что дает выигрыш по сравнению с некогерентными РЛС.
Существенными недостатками известной системы является большое время обнаружения новых целей и недостаточная точность слежения за траекторией и скоростью движения целей, что связано с малой скоростью обзора пространства. В результате этого цели, летящие с высокой скоростью и находящиеся в зоне обзора РЛС малое время могут быть не обнаружены, а слежение за обнаруженными целями происходит с недостаточной точностью. Поясним это более подробно.
Основным режимом работы такой РЛС является совмещенный режим работы по наземным и по воздушным целям. Для повышения точности определения координат целей в условиях жестких ограничений на размеры антенны в известной РЛС применяется миллиметровый диапазон волн, обеспечивающий ширину луча антенны αаз около 0.5o. Для работы по подвижным целям время накопления τн отраженного сигнала по каждому элементу разрешения при проведении доплеровских измерений даже при параллельной обработке отраженных сигналов по дальности будет обратно пропорционально разрешающей способности РЛС по частоте Доплера δfд в процессоре обработки сигналов, которая, в свою очередь, прямо пропорциональна произведению значения удвоенной разрешающей способности РЛС по радиальной скорости цели δvr на значение несущей частоты зондирующего сигнала f0 и обратно пропорционально скорости света. Кроме того, τн ограничено временем радиолокационного контакта с целью, т.е. временем прохождения луча антенны через цель. При δvr = 1 м/c, fo=35 ГГц получаем τн не менее 0,004 с, что ограничивает угловую скорость просмотра пространства по азимуту ωаз значением, не превышающим
ωаз = αаз/τн = 0,5/0,004 = 78°/c.
Следовательно, время просмотра одной строки в секторе обзора 90o составляет не менее 1,15 с, а в круговой зоне - не менее 4.6 с. При многострочном обзоре пространства время обзора значительно больше, т.к. оно прямо пропорционально количеству строк. При такой большой дискретности обзора пространства качество контроля высокоскоростных воздушных целей в пространстве, окружающем вертолет, недостаточно.
Вследствие этого известная РЛС находит практическое применение только для работы по неподвижным или малоскоростным целям.
Задачей изобретения является уменьшение времени получения первого отсчета координат цели, вошедшей в зону обзора РЛС, и повышение точности слежения за траекторией и скоростью движения целей.
Эта задача решается тем, что в состав предлагаемой вертолетной импульсно-доплеровской РЛС дополнительно введены: вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета и которая соединена с антенным плечом второго введенного циркулятора, вход которого подключен к выходу второго введенного передатчика, вход которого подсоединен к четвертому выходу синхронизатора, и коммутатор сигналов, первый вход которого подключен к выходу первого приемника, второй вход - к четвертому выходу процессора данных, а выход - ко входу синхронного детектора, а также второй приемник, вход которого подключен к выходу второго циркулятора, выход - к третьему входу коммутатора сигналов, а пятый выход синхронизатора соединен со вторым входом второго приемника.
На фиг.1 представлена блок-схема устройства прототипа.
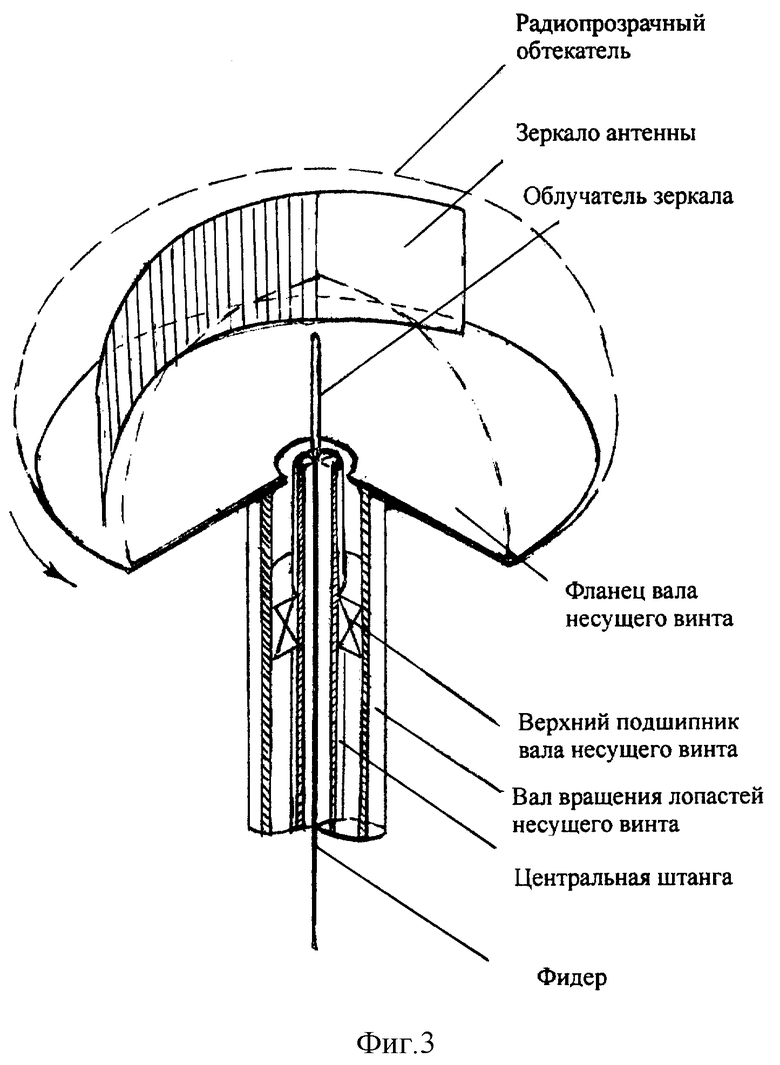
На фиг. 2 представлена блок-схема предлагаемой импульсно-доплеровской РЛС.
На фиг.3 представлена схема расположения второй антенны на валу несущего винта вертолета.
Радиолокационная система (фиг.2) содержит первую антенну 1, соединенную с антенным плечом первого циркулятора 2, выход которого связан с первым входом первого приемника 3. Вход первого циркулятора соединен с выходом первого передатчика 4, вход которого подключен к первому выходу синхронизатора 5, по которому в передатчик 4 подаются сигналы запуска. Второй выход синхронизатора, по которому передается опорный сигнал гетеродина, соединен со вторым входом первого приемника. Выход первого приемника соединен через первый коммутируемый вход дополнительно введенного коммутатора сигналов 6 к последовательно соединенным синхронному детектору 7 и аналого-цифровому преобразователю 8, выход которого соединен с первым входом процессора обработки сигналов 9. По третьему выходу синхронизатора 5, соединенному со вторым входом синхронного детектора 7, подается опорный сигнал для синхронного детектирования. Первый и второй выходы процессора обработки сигналов 9 соединены соответственно с индикатором 10 и со входом процессора данных 11. По первому выходу процессора данных 11, соединенному со вторым входом процессора обработки сигналов 9, передаются сигналы управления процессором обработки сигналов 9. По второму выходу процессора данных 11, соединенному с синхронизатором 5, передаются сигналы управления синхронизатором 5. По третьему выходу процессора данных 11, соединенному с комплексом бортового радиоэлектронного оборудования вертолета, передаются данные о координатах и скорости обнаруженных и отслеживаемых радиолокационной системой целях. По четвертому выходу процессора данных 11, соединенному со вторым входом коммутатора сигналов 6, передаются сигналы управления коммутатором.
РЛС также содержит дополнительно введенные: вторую антенну 12, второй циркулятор 13, второй передатчик 14 и второй приемник 15. Вторая антенна соединена с антенным плечом второго циркулятора, вход которого подключен к выходу второго передатчика, вход которого подсоединен к четвертому выходу синхронизатора 5. По четвертому выходу синхронизатора 5 подаются сигналы запуска второго передатчика 14. Первый вход второго приемника подключен к выходу второго циркулятора, а выход - к третьему входу коммутатора сигналов 6, который также как и первый вход коммутатора является коммутируемым. По пятому выходу синхронизатора 5, соединенному со вторым входом второго приемника 15, передается опорный сигнал гетеродина.
Антенна 12 (фиг. 3) содержит неподвижный облучатель параболического зеркала, например, электромагнитный вибратор, закрепленный на верхнем конце неподвижной центральной полой штанги, вокруг которой происходит вращение вала с закрепленными на нем лопастями несущего винта вертолета. Этот облучатель установлен в фокусе зеркала антенны 12, которое жестко связано с фланцем вала несущего винта и вращается вместе с ним вокруг центральной неподвижной штанги. Неподвижный облучатель электрически соединен с фидером, который располагается в полости центральной штанги, и другим концом подключен к циркулятору Ц2, который установлен в фюзеляже вертолета. По этому фидеру производится передача зондирующих сигналов от циркулятора Ц2 к антенне 12 и передача принятых антенной 12 эхо-сигналов к циркулятору Ц2. Облучатель и зеркало антенны обеспечивают формирование луча антенны 12 как на передачу, так и на прием сигналов. Антенна 12 размещается под радиопрозрачным обтекателем, который также закреплен на фланце вала несущего винта и обеспечивает защиту антенны от воздействий атмосферы и потока воздуха при движении вертолета.
Предлагаемая импульсно-доплеровская РЛС работает следующим образом.
Вторая антенна совершает круговой обзор пространства синхронно с вращением несущего винта вертолета, совершая несколько оборотов в секунду. Синхронизатор 5 обеспечивает согласованную работу составных частей РЛС. Управление синхронизатором производится по его входу процессором данных 11 через второй выход. Синхронизатор формирует высокостабильные импульсные сигналы с высокочастотным заполнением для запуска второго передатчика 14, а также высокостабильные опорные сигналы для первого приемника 3, второго приемника 15 и синхронного детектора 7. Сформированные синхронизатором 5 высокочастотные колебания усиливаются вторым передатчиком 14 проходят через второй циркулятор 13 во вторую антенну 12 и излучаются ею.
Отраженные от цели сигналы принимаются второй антенной и через второй циркулятор передаются на вход второго приемника 15, откуда они после преобразования на промежуточную частоту и усиления передаются на третий вход коммутатора сигналов 6. Управление коммутатором производится по второму входу от процессора данных 11 через четвертый выход. При работе в этом режиме коммутатор соединяет первый вход синхронного детектора с выходом второго приемника 15, поэтому сигналы с выхода приемника 15 поступают на вход синхронного детектора 7. Далее эхо-сигналы детектируются и поступают в аналого-цифровой преобразователь 8, где производится их преобразование в цифровую форму и выдача в процессор обработки сигналов 9. В процессоре обработки сигналов 9 производится их накопление, свертка, пороговая обработка, а также дальномерные и доплеровские измерения с привязкой к угловому положению луча антенны при прохождении его через цель, в результате которых определяются координаты и радиальная скорость цели при каждом обороте (периоде обзора) антенны 12. Кроме того, в процессоре обработки сигналов 9 формируется видеоинформация, предназначенная для отображения на индикаторе 10 в каждом периоде обзора антенны 12. С другого выхода процессора обработки сигналов цифровые данные о параметрах цели, полученные в каждом периоде обзора, передаются в процессор данных 11, где по нескольким периодам обзора производится завязка трассы цели, уточняются ее координаты и скорость, данная цель берется на автоматическое сопровождение по координатам и скорости.
Процессор данных 11 управляет работой синхронизатора и процессора обработки сигналов в различных режимах работы РЛС, а также обеспечивает информационную связь РЛС с комплексом К бортового радиоэлектронного оборудования вертолета, куда в качестве целеуказания передаются полученные данные о текущем местоположении и скорости обнаруженной цели. Кроме того, используя координаты цели, он формирует целеуказания для антенны 1, которые содержат данные о начале и конце углового сектора, по получении которых луч антенны 1, переводится в область пространства, где находится обнаруженная цель и включается режим сканирования антенны 1 и поиска указанной ей цели. Размеры углового сектора сканирования антенны 1 могут быть ограничены шириной луча антенны 12. Одновременно с этим процессор данных 11 подключает через коммутатор сигналов 6 выход приемника 3 к синхронному детектору 7. При этом формирование синхронизатором 5 высокочастотных колебаний для передатчика 14 прекращается и начинают формироваться высокочастотные колебания для передатчика 4, которые усиливаются им, проходят через первый циркулятор 2 и излучаются в пространство антенной 1. Отраженные от цели сигналы принимаются антенной 1 и через циркулятор 2 подаются на вход приемника 3, где они преобразуются на промежуточную частоту, усиливаются и передаются на первый вход коммутатора сигналов 6. Далее обработка эхо-сигналов, принятых антенной 1, происходит аналогично обработке эхо-сигналов, принятых антенной 12. В результате этого процесса происходит более точный отсчет угловых координат цели, уже находящейся на сопровождении, причем сектор сканирования антенны 1, обеспечивающий слежение за целью, взятой на сопровождение антенной 12, существенно меньше по сравнению с сектором поиска, который используется в прототипе, что значительно увеличивает темп обновления информации о координатах и скорости цели при слежении за ней с использованием антенны 1.
После получения точных координат и скорости цели РЛС переходит в режим циклической работы с использованием антенн 1 и 12. Циклограмма работы антенн, синхронизатора и коммутатора сигналов задается процессором данных 11, например, для обнаружения цели каждую секунду может выделяться 4 периода обзора антенны 12, а остальное время - для уточнения текущих координат и скорости цели с использованием антенны 1.
Ширина сектора сканирования для антенны 1 определяется шириной луча антенны 12αa12, которая при сохранении в РЛС равенства времени накопления эхо-сигналов, принимаемых антеннами 1 и 12, прямо пропорциональна произведению ширины луча антенны 1αa1 на отношение угловых скоростей движения антенн по зоне обзора ωa12/ωa1. Угловая скорость антенны 12 больше, чем у антенны 1, поэтому луч антенны 12αa12 должен быть шире луча антенны 1αa1. Например, при αa1 = 0,5°, ωa1 = 78°/c и ωa12 = 1800°/c (5 оборотов в секунду) имеем αa12 = 11,5°.
В предлагаемой системе:
обнаружение и определение координат и радиальной скорости воздушной цели в круговой зоне по азимуту с помощью антенны 12 происходит за один цикл обзора антенны 12, т.е. за один оборот несущего винта вертолета, который для современных вертолетов составляет около 0,2 с;
время взятия цели на сопровождение по информации, получаемой антенной 12, равно 2-3 циклам обзора, т.е. составляет 0,4-0,6 с, причем за это время происходит наведение и антенны 1 на ту же цель, а период сканирования антенной 1 сектора обзора, где находится цель, шириной 15o составляет около 0,2 с.
Таким образом, предлагаемое техническое решение обеспечивает существенный выигрыш по времени обнаружения. Кроме того, обеспечивается и повышение точности слежения за траекторией и скоростью движения цели за счет повышения темпа обновления информации о пространственном положении цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| МНОГОКАНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2316021C2 |
| ДВУХДИАПАЗОННЫЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИЙ РАДИОЛОКАТОР | 2004 |
|
RU2273861C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
Предложение относится к радиотехнике и более конкретно к вертолетным импульсно-доплеровским радиолокационным системам (РЛС). Достигаемым техническим результатом является то, что предлагаемая РЛС обеспечивает существенный выигрыш по времени обнаружения высокоскоростных целей в круговой зоне, кроме того, повышается точность слежения за траекторией и скоростью движения цели. В отличие от известной РЛС, в предлагаемой системе дополнительно введены вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета, второй циркулятор, второй передатчик сигналов, второй приемник и коммутатор сигналов. Эта антенна приводит круговой обзор пространства синхронно с вращением несущего винта вертолета, совершая несколько оборотов в секунду. При этом коммутатор, управляемый от процессора данных, приоритетно подключается к выходу второго приемника, обеспечивая обнаружение целей. Первая антенна используется для уточнения координат обнаруженных целей, работая в секторном обзоре, выбираемом в соответствии с координатами и скоростью обнаруженной цели. 3 ил.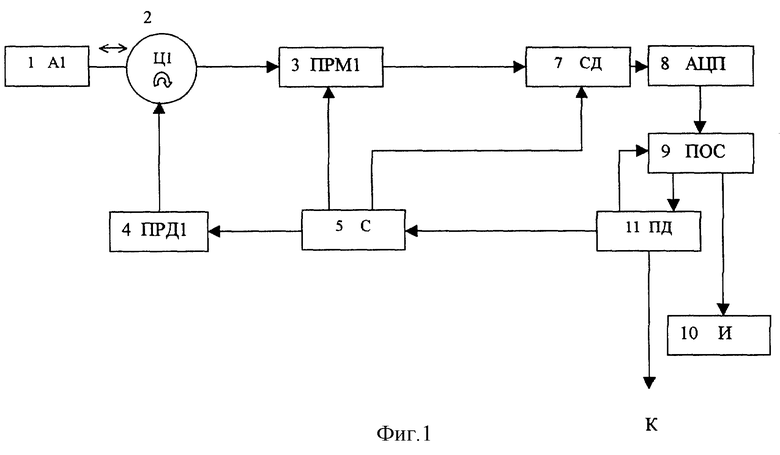
Вертолетная импульсно-доплеровская радиолокационная система, содержащая первую антенну, соединенную с антенным плечом первого циркулятора, выход которого связан с первым входом первого приемника, вход первого циркулятора соединен с выходом первого передатчика, вход которого подключен к первому выходу синхронизатора, второй выход синхронизатора соединен со вторым входом первого приемника, выход которого соединен через последовательно соединенные синхронный детектор и аналого-цифровой преобразователь с процессором обработки сигналов, первый и второй выходы которого соединены соответственно с индикатором и со входом процессора данных, первый, второй и третий выходы которого соединены соответственно со вторым входом процессора обработки сигналов, входом синхронизатора и с комплексом бортового радиоэлектронного оборудования вертолета, а третий выход синхронизатора соединен со вторым входом синхронного детектора, отличающаяся тем, что в нее дополнительно введены вторая антенна, вращение которой производят в круговой зоне по азимуту валом несущего винта вертолета, соединенная с антенным плечом второго введенного циркулятора, вход которого подключен к выходу второго введенного передатчика, вход которого подсоединен к четвертому выходу синхронизатора, и коммутатор сигналов, первый вход которого подключен к выходу первого приемника, второй вход - к четвертому выходу процессора данных, а выход - ко входу синхронного детектора, а также второй приемник, вход которого подключен к выходу второго циркулятора, выход - к третьему входу коммутатора сигналов, а пятый выход синхронизатора соединен со вторым входом второго приемника.
| РЕКЛАМНЫЙ ПРОСПЕКТ LONGBOW SYSTEM DESCRIPITION, ФИРМА LOCKHEED MARTIN, 1995 | |||
| МАЛОВЫСОТНАЯ ФАЗОРАЗНОСТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1991 |
|
RU2014632C1 |
| US 5736955 A, 07.04.1998 | |||
| Шланговое соединение | 0 |
|
SU88A1 |

