Предлагаемое изобретение относится к области радиолокации и может быть использовано на вертолетах.
Известны радиолокационные станции (РЛС) обзора земной и водной поверхности, осуществляющие обзор путем секторного или кругового движения луча антенны в азимутальной плоскости. Большинство радиолокационных станций на вертолетах применяют 3-сантиметровый диапазон волн излучения. Такие радиолокационные станции в основном применяют для обнаружения морских объектов.
Аналогом такой РЛС может быть РЛС фирмы "Маркони" SEASPRAY-2000, которая применяется для обнаружения морских объектов. В качестве прототипа рассматривается радиолокационная станция "Осьминог-Э", применяемая в экспортном варианте на вертолетах Ка-28. Она предназначена для обнаружения морских целей в круговом секторе обзора.
Блок-схема бортовой радиолокационной станции прототипа представлена на фиг.1, где:
1 - антенный пост;
2 - передающее устройство;
3 - циркулятор;
4 - приемное устройство;
5 - двигатель антенны;
6 - устройство первичной обработки информации;
7 - информационно-вычислительная система;
8 - индикатор;
9 - устройство управления и стабилизации антенны.
Как следует из описания, в прототипе применяется параболическая антенна размером (0,95•0,45) м с круговым вращением с помощью двигателя (5), предназначенная для излучения и приема СВЧ энергии при обзоре морской поверхности. Для формирования электромагнитной энергии применяется магнетронный передатчик. Эта РЛС некогерентна и работает по традиционному принципу. Синхронизатор, размещенный в инфрмационно-вычислительной системе (7), формирует импульсы с заданной длительностью и частотой повторения и подает их на модулятор передающего устройства (2). Из передающего устройства (2) СВЧ импульсы через циркулятор (3) подаются на антенный пост (1) и излучаются в пространство. Отраженная от морских объектов (и морской поверхности) энергия поступает на антенный пост (1) и через циркулятор (3) на приемное устройство (4), затем поступает на устройство первичной обработки (6), и далее после накопления сигнала на индикатор (8). С помощью устройства управления и стабилизации (9) антенна стабилизируется по наклону при эволюциях вертолета.
Главным недостатком приведенных радиолокационных станций является плохое угловое разрешение антенны, следствием которого является неэффективное применение для обнаружения малоразмерных наземных и морских объектов на фоне отражений от земной и морской поверхности из-за большой площади отражения, перекрываемой диаграммой такой антенны. Причиной плохого углового разрешения РЛС является ограниченный размер апертуры антенны, который можно реализовать при размещении антенны только в ограниченных габаритах фюзеляжа вертолета, как это реализовано в прототипе - РЛС "Осьминог-Э". Кроме того, недостатком РЛС 3-сантиметрового диапазона является также характерное для этого диапазона волн снижение характеристик обнаружения в плохих метеоусловиях, особенно в дождь, из-за отражений и затухания энергии. Существенным недостатком применяемых РЛС, и, в частности, прототипа, является использование антенны в качестве отдельного устройства со своим двигателем для вращения зеркала антенны, которое вносит весомый вклад в массу и стоимость аппаратуры РЛС.
Задачей изобретения является повышение разрешающей способности РЛС по углу в азимутальной плоскости и вероятности обнаружения малоразмерных наземных и надводных объектов на фоне подстилающей поверхности в сложных метеоусловиях при одновременном снижении массогабаритных характеристик.
Эта задача решается тем, что в предложенной РЛС антенна выполнена по структуре антенной решетки в L-диапазоне излучения волн из пленочного фольгированного диэлектрика с излучателями в виде печатных вибраторов и размещена в лопасти вертолета в области максимального размера ее длины, а также введением в РЛС цифрового процессора сигналов, цифрового процессора данных, задающего генератора и датчика угла, обеспечивающих работу РЛС в когерентном и некогерентном режимах, синхронизацию и обработку принимаемых отраженных сигналов.
На фиг.1 приведена блок-схема бортовой радиолокационной станции прототипа.
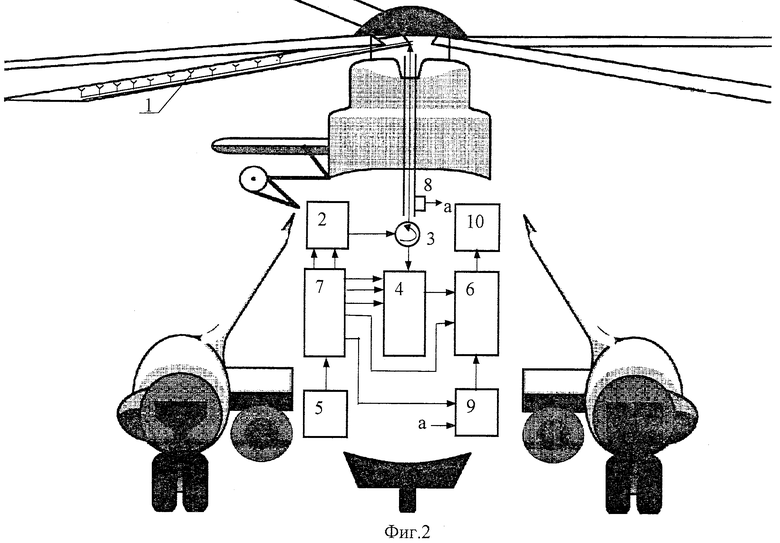
На фиг.2 представлена блок-схема предлагаемой радиолокационной станции.
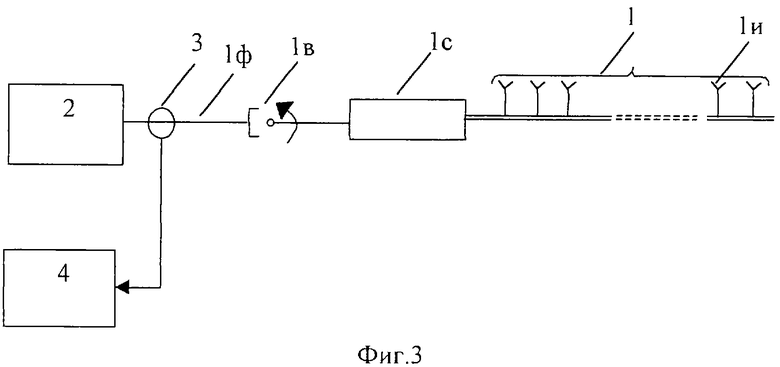
На фиг. 3 приведена электрическая схема антенны и ее соединение с приемопередающими блоками РЛС с помощью фидерного тракта.
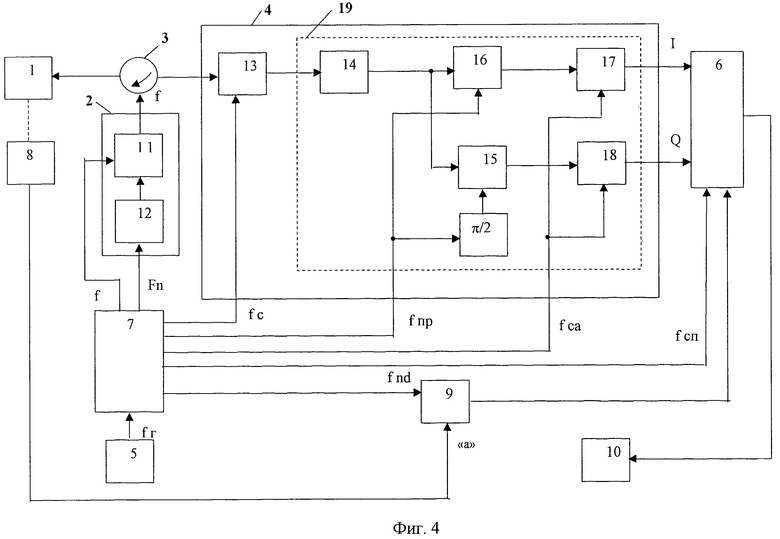
На фиг.4 представлена развернутая структурная схема предлагаемой радиолокационной станции.
На фиг.5 приведен эскиз размещения антенной решетки в лопасти вертолета.
В предлагаемую радиолокационную станцию входят:
1 - антенная решетка;
2 - передающее устройство;
3 - циркулятор;
4 - приемное устройство;
5 - задающий генератор;
6 - цифровой процессор сигналов;
7 - синхронизатор;
8 - датчик угла
9 - цифровой процессор данных;
10 - индикатор;
На фиг.4 представлена развернутая структурная схема предлагаемой радиолокационной станции, где:
1 - антенная решетка;
2 - передающее устройство;
3 - циркулятор;
4 - приемное устройство;
5 - задающий генератор;
6 - цифровой процессор сигналов;
7 - синхронизатор;
8 - датчик угла;
9 - цифровой процессор данных;
10 - индикатор;
11 - усилитель мощности;
12 - модулятор;
13 - СВЧ-приемник;
14 - усилитель промежуточной частоты;
15 - фазовый детектор;
16 - фазовый детектор;
17 - АЦП;
18 - АЦП;
19 - аналого-цифровой процессор.
Вход-выход антенной решетки (1) через циркулятор (3) соединен с первым входом приемного устройства (4), а выход передающего устройства (2) через циркулятор (3) соединен с входом-выходом антенной решетки (1), первый выход синхронизатора (7) соединен с первым входом передающего устройства (2), второй выход синхронизатора (7) соединен со вторым входом передающего устройства (2), третий выход синхронизатора (7) соединен с вторым входом приемного устройства (4), четвертый выход синхронизатора (7) соединен с третьим входом приемного устройства (4), пятый выход синхронизатора (7) соединен с четвертым входом приемного устройства (4), шестой выход синхронизатора (7) соединен со вторым входом цифрового процессора сигналов (6), седьмой выход синхронизатора (7) соединен с первым входом процессора данных (9), второй вход которого соединен с выходом датчика угла (8), выход цифрового процессора данных (9) соединен с третьим входом цифрового процессора сигналов (6), первый вход которого соединен с выходом приемного устройства (4), а выход цифрового процессора сигналов (6) со входом индикатора (10).
Антенная решетка (1) (см. фиг.3) представляет собой двухпроводную линию, которая выполнена из пленочного фольгированного диэлектрика (материал типа ФДМЭ-1-А-0,1 мм) с излучателями (1и) в виде печатных вибраторов и размещена в лопасти (20) вертолета, используя ее максимальную длину (см. фиг.5). Фидерный тракт (1ф) выполнен на коаксиальном кабеле типа РК-50-4-46. Вращающийся коаксиальный переход (1В) служит для передачи (приема) энергии из передающего (2) (приемного) устройства (3), установленного на неподвижной части вертолета, в антенную решетку (1), установленную на вращающейся лопасти (20) вертолета. Симметрирующее устройство (1с) служит для согласования коаксиального входа с волновым сопротивлением 50 Ом на симметричную двухпроводную линию, нагруженную на излучатели (1и).
Размещение такой антенной решетки (1) в лопасти (20) вертолета представлено на фиг.5. Здесь:
20 - лопасть вертолета;
21 - груз центровочный;
22 - лонжерон лопасти;
23 - стеклопластиковый короб;
24 - хвостовая часть лопасти;
25 - заполнитель;
26 - коаксиальный кабель;
27 - высокочастотный разъем.
Как видно из чертежа (фиг. 5), антенная решетка (1) с симметрирующим устройством (1с) размещена в хвостовой части лопасти (20) по всей ее длине. Антенная решетка (1) размещена и приклеена к стеклопластиковому коробу (23). Короб с увеличенной боковой поверхностью затем приклеивают к задней стенке лонжерона (22). Коаксиальный кабель (26) питания антенной решетки также приклеивают к задней стенке лонжерона (22). Коаксиальный кабель (26) заканчивается высокочастотным разъемом (27). Общий масса антенной решетки не превышает 0,3 кг. При такой массе обеспечивается надежное крепление стеклопластикового короба (23) с антенной решеткой (1) к лонжерону (22), а положение центра тяжести лопасти изменяется незначительно, и, при необходимости, смещение его может быть восстановлено увеличением веса центровочного груза (21).
Работу РЛС в когерентном режиме обеспечивает высокостабильный задающий генератор (5), частота которого fг является базовой и используется в синхронизаторе (7) для формирования сигнала излучения несущей частоты L-диапазона, а также гетеродинного и других сигналов, синхронизирующих работу блоков, аналого-цифрового преобразователя.
Введенный синхронизатор (7) по своей структуре соответствует синтезатору частот, необходимых для когерентного режима работы, а также частот, синхронизирующих работу блоков. Все высокочастотные сигналы, необходимые для работы РЛС, формируются в синхронизаторе (7) путем умножения частоты сигнала задающего генератора (5), а низкочастотные синхронизирующие формируются путем деления частоты сигнала задающего генератора (5).
Cинхронизатор (7) вырабатывает следующие частоты сигналов на соответствующих выходах:
- выход 1 - частота излучения f;
- выход 2 - частота повторения импульсов Fп;
- выход 3 - частота гетеродина fc;
- выход 4 - частота промежуточная fпp;
- выход 5 - частота дискретизации АЦП fса;
- выход 6 - частота синхронизации цифрового процессора сигналов fсп;
- выход 7 - частота синхронизации цифрового процессора данных fпd.
Для обработки принимаемых отраженных сигналов в РЛС введен цифровой перепрограммируемый процессор сигналов (6), который обеспечивает сжатие, накопление, фильтрацию, пороговую обработку сигналов, присвоение и преобразование координат, а также формирование массива радиолокационной информации для выведения ее на индикатор (10). В РЛС также введен цифровой процессор данных (9), который обеспечивает вычисление параметров РЛС в когерентном и некогерентном режимах, а также выработку сигналов и команд для управления блоками РЛС. Одной из функций процессора данных в предлагаемой РЛС является вычисление текущих координат радиолокационной информации на основе значений угла поворота лопасти вертолета, снимаемых с датчика угла.
РЛС работает следующим образом:
При работе двигателя вертолета производится вращение лопасти с антенной решеткой (1) в круговом секторе.
В процессе вращения антенной решетки (1) усилитель мощности (11) усиливает высокочастотные импульсы f, поступающие из синхронизатора (7) и через циркулятор (3) и фидерный тракт (1ф) передает их в антенную решетку (1). Антенной решеткой (1) эти импульсы излучаются в пространство и распространяются в направлении, определяемом диаграммой направленности антенны. Когерентность сигнала определяется задающим высокостабильным генератором (5). На вход модулятора (12) из синхронизатора (7) поступают импульсы запуска (Fn). Частота повторения импульсов запуска (Fп) формируется в синхронизаторе (7) путем деления частоты сигнала fг задающего генератора (5). Длительность импульса также формируется из сигнала задающего генератора путем использования периода сигнала. Модулятор (12) осуществляет модуляцию высокочастотного сигнала f и формирует импульсы, поступающие в усилитель мощности (11), имеющие заданную длительность (τ) и период повторения (Тп), определяемый однозначной дальностью.
Высокочастотный сигнал несущей частоты f формируется синхронизатором (7). От задающего генератора (5) сигнал с частотой (fг) поступает в синхронизатор (7), умножается до более высокой частоты (f) и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной решеткой. Также в процессе вращения антенной решетки, отраженные сигналы от объектов и поверхности принимаются антенной решеткой (1) и через фидерный тракт (1ф) и циркулятор (3) поступают в приемное устройство (4). В СВЧ приемнике (13) эти сигналы в смесителе приемника смешиваются с сигналом синхронизатора fc, в результате чего образуются сигналы промежуточной частоты fпp. Сигналы промежуточной частоты поступают в аналого-цифровой процессор (19), где в усилителе промежуточной частоты УПЧ (14) усиливаются и поступают на фазовые детекторы (15) и (16), на которые от синхронизатора (7) поступает сигнал с частотен, равной промежуточной частоте fпp. Причем на один из фазовых детекторов сигнал fпр поступает со сдвигом на π/2.
На выходах фазовых детекторов образуются синфазный I и квадратурный Q сигналы. Далее, оба сигнала I и Q с помощью АЦП (17) и (18), управляемых с помощью синхросигнала fca, преобразуются в цифровую форму. С выходов АЦП (17) и (18) сигналы двух квадратур поступают в цифровой процессор сигналов (6), синхронизируемый сигналом fсп с шестого выхода синхронизатора (7). В цифровом процессоре сигналов (6) в зависимости от режима работы станции производится когерентная или некогерентная обработка принятых сигналов. После пороговой обработки радиолокационных сигналов цифровой процессор сигналов (6) преобразует координаты поступающей радиолокационной информации из полярной системы координат в задаваемую систему координат.
Для этого цифровой процессор данных (9), синхронизуемый сигналом fпd, на основе поступающих с датчика угла (8) (соединение "а" (фиг.2) значений угла поворота антенной решетки (1) (угла поворота лопасти (20) вертолета) производит вычисление текущих координат радиолокационной информации в заданной системе, передает их в цифровой процессор сигналов (6) для преобразования текущих координат радиолокационной информации. Из цифрового процессора сигналов радиолокационная информация поступает в индикатор (10).
Эффективность применения предложенной РЛС по сравнению с прототипом заключается в повышении углового разрешения в азимутальной плоскости.
Как известно, ширина луча θл диаграммы направленности по уровню мощности Р=0,5
где λ - длина волны излучения,
L - линейный размер антенны в азимутальной плоскости.
В РЛС прототипа из-за ограничения габаритов фюзеляжа вертолета, линейный размер антенны составляет 0,95 м.
Максимально выделяемый размер лопасти вертолета для размещения в ней антенной решетки - 6 м.
Отсюда следует, что при использовании одной и той же длины волны λ, угловая разрешающая способность в азимутальной плоскости в заявляемой РЛС будет более чем в 6 раз лучше, чем в прототипе.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2004 |
|
RU2256939C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ НАЗЕМНЫХ ПРЕПЯТСТВИЙ | 2005 |
|
RU2296344C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2194288C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И КВАЗИНЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ | 2012 |
|
RU2510685C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| ВЕРТОЛЕТНАЯ СИСТЕМА НАВЕДЕНИЯ ОРУЖИЯ | 2003 |
|
RU2230278C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |

Изобретение относится к области радиолокации и может быть использовано на вертолетах. Технический результат заключается в повышении вероятности обнаружения малоразмерных наземных и надводных объектов на фоне отражений от подстилающей поверхности за счет повышения разрешающей способности по углу, а также повышения эффективности работы станции в сложных метеоусловиях. Этот результат достигается тем, что в состав аппаратуры РЛС в качестве антенны вводится антенная решетка, выполненная на двухпроводной линии из пленочного фольгированного диэлектрика с излучателями в виде печатных вибраторов, которая размещается в лопасти вертолета в области максимального размера ее длины. При этом масса антенны не превышает 0,3 кг, что существенно снижает массу аппаратуры РЛС и ее стоимость. 5 ил.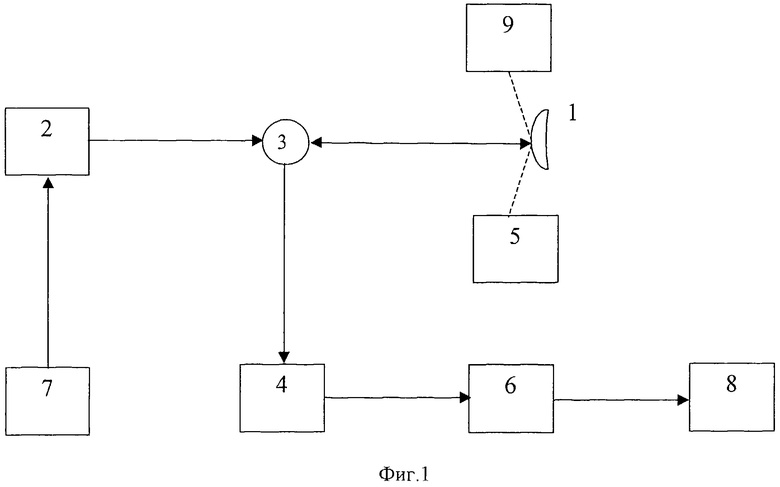
Радиолокационная станция для вертолета, состоящая из антенны, передающего устройства, циркулятора, приемного устройства, синхронизатора и индикатора, при этом вход-выход антенны через циркулятор соединен с первым входом приемного устройства, а выход передающего устройства через циркулятор соединен с входом-выходом антенны, первый выход синхронизатора соединен с первым входом передающего устройства, второй выход синхронизатора - с вторым входом передающего устройства, отличающаяся тем, что антенна выполнена по структуре антенной решетки в L-диапазоне излучения волн из пленочного фольгированного диэлектрика с излучателем в виде печатных вибраторов и размещена в лопасти вертолета в области максимального размера ее длины, а также введены цифровой процессор сигналов, цифровой процессор данных, задающий генератор и датчик угла, при этом третий выход синхронизатора соединен с вторым входом приемного устройства, четвертый выход синхронизатора - с третьим входом приемного устройства, пятый выход - с четвертым входом приемного устройства, шестой выход - со вторым входом цифрового процессора сигналов, а седьмой выход - с первым входом цифрового процессора данных, второй вход которого соединен с выходом датчика угла; выход цифрового процессора данных соединен с третьим входом цифрового процессора сигналов, первый вход которого соединен с выходом приемного устройства, а выход цифрового процессора сигналов - со входом индикатора.
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИЗЛУЧАЮЩЕГО ОБЪЕКТА | 1998 |
|
RU2134431C1 |
| ПЕЛЕНГАТОР | 1992 |
|
RU2046368C1 |
| JP 2000147099, 26.05.2000 | |||
| US 3798647, 19.03.1974 | |||
| US 4197542 A, 08.04.1980. | |||

