Изобретение относится к области радиолокации и предназначено для использования в береговых и корабельных радиолокационных станциях для обнаружения наземных и надводных объектов.
Известны радиолокационные станции - береговые, корабельные или аэродромные, предназначенные для обзора земной и водной поверхности и обнаружения расположенных на ней объектов, осуществляющие обзор путем секторного качания луча антенны в азимутальной плоскости. Зона обзора такой РЛС представляет собой сектор с радиусом, соответствующим дальности действия РЛС. Однако их применение для обнаружения отраженных сигналов от малоразмерных целей (σц ≤ 5 м) в условиях отражений от подстилающей поверхности оказывается неэффективным.
При обнаружении наземных и морских объектов на фоне подстилающей поверхности характеристики обнаружения зависят от соотношения сигнал/шум+фон:
где Рс - отраженная мощность сигнала от объекта;
Рш - мощность собственных шумов приемного канала;
Рф - мощность отражений от подстилающей поверхности.
При низком уровне собственных шумов приемника по сравнению с фоновой составляющей сигнала Рш < Рф отношение сигнал/шум+фон будет определяться:
где σц - эффективная площадь отражения от объекта;
σф - эффективная площадь отражений подстилающей поверхности.
Учитывая, что эффективная площадь отражений подстилающей поверхности определяется:
σф = dL•dZ•σ0,
где σ0 - удельное ЭПР подстилающей поверхности,
dL - элемент разрешения по азимуту,
dZ - элемент разрешения по дальности.
Поэтому характеристики обнаружения объектов на фоне подстилающей поверхности будут существенно зависеть от разрешающей способности РЛС.
Расчеты показывают, что даже при малом коэффициенте отражений σ0 обнаружение малоразмерных объектов на фоне моря может обеспечиваться только при очень высокой разрешающей способности.
Существующие наземные и корабельные РЛС не способны обнаруживать отраженные сигналы от малоразмерных целей в условиях отражения от подстилающей поверхности даже средней интенсивности из-за низкого углового разрешения.
Для улучшения характеристик обнаружения целей разработка таких РЛС в последние годы велась в направлении увеличения апертуры антенны и применения длины волны в миллиметровом диапазоне волн. Однако при традиционном конструировании антенн для выполнения условий обнаружения малоразмерных целей требуется применение антенны с практически нереализуемым размером раскрыва.
В настоящее время для обзора российских морских границ используются РЛС, подобные применяющимся на морских кораблях. Поэтому в качестве аналога таких РЛС можно привести речную навигационную станцию KCLVINHUGHES R, SR 1000, Электрон-Сперри МК-3217р, предназначенную для обеспечения безопасности плавания по рекам и другим водоемам, состоящую из антенны, передатчика, приемника, индикатора и блока питания. Эти станции имеют круговой обзор по азимуту. Отличительной особенностью является большой раскрыв реальной антенны L=2,1-2,4 м при ширине диаграммы направленности в азимуте 0,95-1 град. и разрешении по дальности dZ=7,5 м.
Аналогом также может являться корабельная станция фирмы Racul Marine Electronics RACAL - DECCA RM2090BT, RM2070BT.
Эта РЛС состоит из антенны, передатчика, приемника, индикатора и блока питания. Для получения высокой разрешающей способности этой станции используются антенны с различным размером раскрыва в азимутальной плоскости: L=1,2; 1,8; 2,7 и 3,6 м с применением длин волн λ=3 см и 10 см.
В качестве аналога может также рассматриваться судовая РЛС типа "ДОН" (см. Судовые радиолокационные станции и их применение, т. 3, стр.19. Справочное руководство. Авторы В.Я. Аверьянов и др. под редакцией д.т.н. Ракова В.И. Судостроение, г. Ленинград, 1970 г.).
Задача повышения угловой разрешающей способности наземных РЛС всегда была актуальной. Построение такой РЛС было предложено авторами в РЛС по патенту 2151407, кл. G 01 S 13/00; 13/06. В этой радиолокационной системе высокое угловое разрешение обеспечивается синтезированием апертуры антенны при движении реальной антенны. Поэтому представляется целесообразным в качестве прототипа рассмотреть именно эту РЛС.
Блок-схема прототипа приведена на фиг.1, где 1 - антенна, 2 - передатчик, 3 - приемник, 4 - синтезатор частот, 5 - индикатор, 6 - циркулятор, 7 - датчик угла, 8 - измеритель скорости, 9 - процессор сигналов, 10 - процессор данных, 11 - задающий генератор.
По сравнению с приведенными аналогами в прототипе антенна установлена на подвижное основание и антенне задается поступательно-возвратное движение по направляющим в горизонтальной плоскости, при этом ее электрическая ось установлена перпендикулярно или под углом к направлению движения антенны. Такая антенная система позволяет реализовать режим синтезирования апертуры антенны и обеспечить более высокое угловое разрешение. Однако недостатком такой системы является применение механических устройств для движения антенны. Механическая система движения по направляющим на практике приводит к ограничению максимальной скорости движения и, соответственно, к увеличению времени синтезирования (при заданной длине апертуры) и увеличению времени получения радиолокационной информации. Кроме того, эксплуатация такой механической системы движения антенны в сложных климатических условиях приводит к дополнительным трудозатратам.
Задача предлагаемого изобретения заключается в уменьшении времени синтезирования и времени получения радиолокационной информации без механического движения антенны при сохранении высокого углового разрешения РЛС в азимутальной плоскости.
Решение достигается тем, что в радиолокационной системе, содержащей передатчик, циркулятор, приемник, синтезатор частот, процессор сигналов, процессор данных, задающий генератор, индикатор и антенну, состоящую из неподвижного формирующего зеркала, вращающегося отражающего зеркала, неподвижного облучателя, двигателя вращения отражающего зеркала и датчика угла поворота, луч антенны движется в горизонтальной плоскости с параллельным перемещением диаграммы направленности, при этом фазовый центр антенны перемещается в плоскости, перпендикулярной электрической оси Д. Н.
Во время движения луча антенна производит излучение когерентных импульсов передатчика и прием отраженных сигналов от объекта. При движении луча антенны путем обработки и когерентного суммирования отраженных от объекта сигналов создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реального луча антенны.
Возможность когерентного суммирования принятых отраженных сигналов при движении луча обеспечивают путем компенсации фазовых изменений принимаемых сигналов доплеровской частоты. Компенсацию фазовых изменений проводят на основе измерения скорости движения луча антенны в течение времени синтезирования. Обработку сигнала проводят методом гармонического анализа. При этом комплексные сигналы, отраженные от объекта, на входе системы обработки умножают на сигналы опорной функции, комплексно-сопряженные с сигналами, отраженными от объекта.
С этой целью на основе задаваемых и измеряемых параметров вычисляют опорную функцию h(τ):
где Н(τ) - весовая функция, определяющая заданный уровень боковых лепестков,
τ - время,
Vлч - составляющая скорости движения фазового центра луча антенны в направлении на объект:
Vлч = Vл Cosαi,
где Vл - скорость движения луча антенны,
αi - угол в азимутальной плоскости между вектором V и направлением на объект,
ar(t) - составляющая ускорения движения фазового центра луча антенны: ,
,
R - расстояние до объекта.
В результате когерентного суммирования формируется выходной сигнал, соответствующий сигналу, принимаемому синтезированной диаграммой направленности шириной θc существенно меньшей ширины диаграммы направленности реальной антенны θ.
Роль линейного размера апертуры антенны в этом случае играет длина траектории движения луча антенны РЛС.
Время когерентной обработки τ определяется скоростью движения луча антенны и длиной траектории.
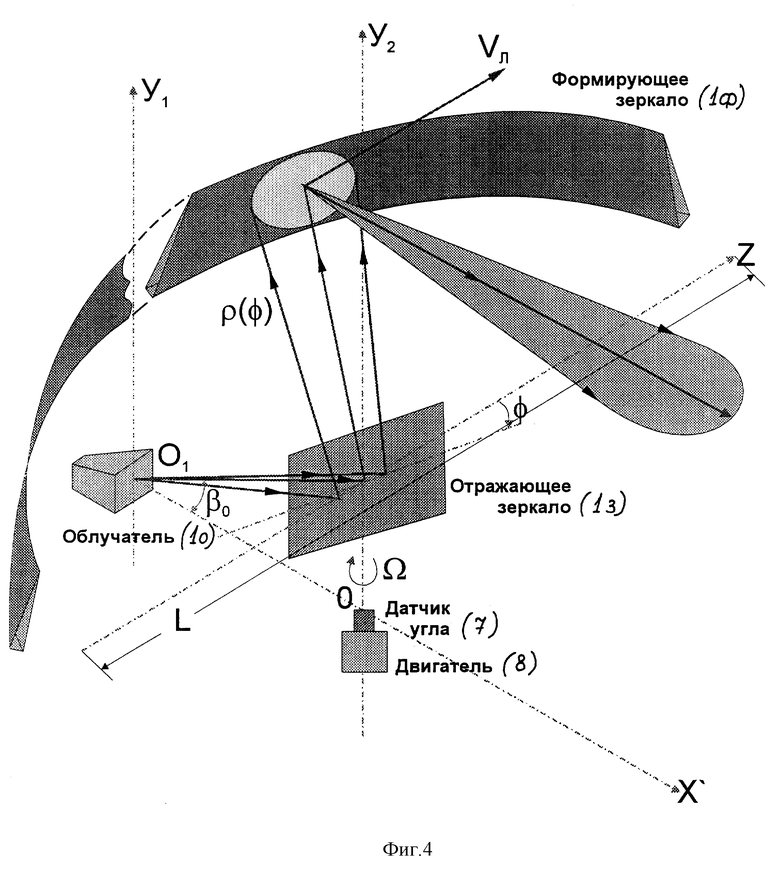
Разрешающая способность РЛС определяется длиной L траектории движения луча антенны, т.е. длиной формирующего неподвижного зеркала (фиг.4). Однако следует отметить, что при одинаковом размере апертуры разрешающая способность при синтезированной апертуре в два раза лучше, чем в антенне с реальным лучом.
Получение высокого азимутального разрешения в предлагаемой радиолокационной системе обеспечивается с помощью процедуры обработки, аналогичной РЛС прототипа.
Задача уменьшения времени синтезирования в предлагаемом изобретении реализуется за счет более высокой скорости линейного перемещения фазового центра антенны, обеспечиваемой путем применения практически выполнимой высокой угловой скорости Ω отражающего зеркала антенны. Отсутствие в предлагаемой антенне механических направляющих и средств движения антенны позволяет существенно снизить трудозатраты на эксплуатацию антенны, особенно применяемой в регионах со сложными климатическими условиями.
На фиг.1-6 представлены поясняющие чертежи.
На фиг.1 приведена блок-схема устройства прототипа.
На фиг.2 представлена блок-схема предложенной РЛС.
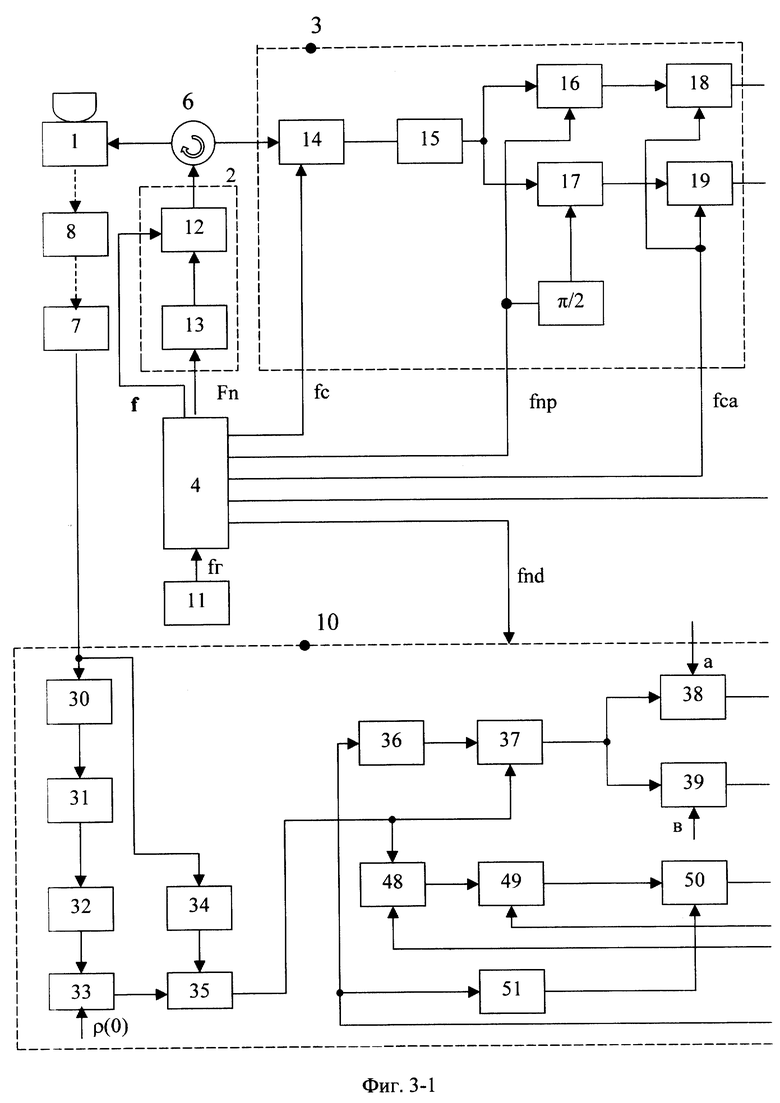
На фиг. 3-1 и 3-2 представлена развернутая структурная схема предложенной РЛС, в которой подробно иллюстрируется процесс формирования и обработки сигналов в каждом из блоков и РЛС в целом.
На фиг.4 приведена структурная схема антенны с отображением движения луча антенны.
На фиг.5 приведена схема выполнения профиля антенны в вертикальной плоскости.
На фиг. 6 приведена схема выполнения профиля антенны в горизонтальной плоскости.
Предлагаемая радиолокационная система содержит (фиг.2) 1 - антенну, 2 - передатчик, 3 - приемник, 4 - синтезатор частот, 5 - индикатор, 6 - циркулятор, 7 - датчик угла поворота отражающего зеркала, 8 - двигатель вращения отражающего зеркала, 9 - процессор сигналов, 10 - процессор данных, 11 - задающий генератор.
В предложенной РЛС лучу антенны задают поступательное движение в горизонтальной плоскости с параллельным перемещением электрической оси диаграммы направленности. Это достигается особым ее выполнением.
Антенна (см. фиг. 4) состоит из неподвижного формирующего зеркала 1ф, вращающегося отражающего зеркала 1з, неподвижного облучателя 1o, двигателя вращения отражающего зеркала 8 и датчика угла поворота вращающегося зеркала 7.
Зеркало антенны, формирующее луч, выполняется в виде поверхности двойной кривизны (см. фиг.5 и 6). В вертикальной плоскости это параболическая кривая -
где Y, X - оси координат,
ρo - радиус окружности в горизонтальной плоскости, равный половине фокусного расстояния,
М - в общем случае смещение начала кривой от фокальной точки F.
В горизонтальной плоскости профиль образован в виде огибающей системы парабол. При этом радиус вектор образующей кривой  зависит от угла поворота отражающего плоского зеркала, вращающегося относительно вертикального оси OY2. Для каждого угла зеркальное изображение фокальной точки F размещается на окружности радиусом ρo (F', F", F"' и т.д.). Каждому углу φ соответствует
зависит от угла поворота отражающего плоского зеркала, вращающегося относительно вертикального оси OY2. Для каждого угла зеркальное изображение фокальной точки F размещается на окружности радиусом ρo (F', F", F"' и т.д.). Каждому углу φ соответствует  и фокусное расстояние эквивалентной параболы, равное (2ρoCosΦ+MCosΦ).
и фокусное расстояние эквивалентной параболы, равное (2ρoCosΦ+MCosΦ).
При этом учитывается, что ось эквивалентной параболы смещается параллельно оси О1X.
Аналитическое выражение для радиус-вектора с началом в точке О (при β0= 0) имеет вид:

Рабочая зона углов выбирается из конструктивных соображений и составляет сектор [0 - +-π/4].
Вращающееся отражающее зеркало 1з обеспечивает передачу излученной из облучателя энергии на участок неподвижного формирующего зеркала 1ф. Поворот отражающего зеркала 1з на угол Φ обеспечивает облучение участка формирующего зеркала 1ф, соответствующего углу 2Φ, а вращение отражающего зеркала 1з обеспечивает движение участка облучения неподвижного формирующего зеркала 1ф по всей его длине. В результате сформированный в пространстве луч перемещается в горизонтальной плоскости в пределах размера L. При этом электрическая ось сформированного антенной движущегося луча будет параллельна оси X.
Как следует из фиг.4, вращение отражающего зеркала производится двигателем. При этом чем выше скорость вращения отражающего зеркала, тем выше линейная скорость V перемещения луча в горизонтальной плоскости.
При этом линейная скорость определяется:
Vл = ρ(Φ)Ω
где  - угловая скорость вращения отражающего зеркала;
- угловая скорость вращения отражающего зеркала;
ρ(Φ) - величина радиус-вектора, равного:
Угол Φ меняется в интервале ±45o.
ρo = ρ(o)Cosβ0 - проекция радиус-вектора ρ(Φ) на плоскость XOZ при Φ=0.
Конструкция антенны, ее построение определяются конкретными требованиями и условиями применения РЛС. Выполнение такой антенны проводится инженерными методами с применением известных материалов и конструктивных элементов.
На фиг.3-1 и 3-2 представлена развернутая структурная схема предложенной радиолокационной системы.
В радиолокационную систему входят:
антенна - 1,
передатчик - 2,
приемник - 8,
синтезатор частот - 4,
индикатор - 5,
циркулятор - 6,
датчик угла поворота отражающего зеркала - 7,
двигатель отражающего зеркала - 8,
процессор сигналов - 9,
процессор данных - 10,
задающий генератор - 11,
усилитель мощности - 12,
модулятор - 13,
СВЧ приемник - 14,
усилитель промежуточной частоты - 15,
фазовый детектор - 16,
фазовый детектор - 17,
АЦП - 18,
АЦП - 19,
память - 20,
память - 21,
умножитель - 22,
умножитель - 23,
умножитель - 24,
умножитель - 25,
узел разности - 26,
узел суммы - 27,
процессор БПФ - 28,
вычислитель - 29,
узел модуля Сos - 30,
делитель - 31,
узел разности - 32,
умножитель - 33,
умножитель - 34,
умножитель - 35,
узел Cos - 36,
умножитель - 37,
умножитель - 38,
умножитель - 39,
умножитель - 40,
умножитель - 41,
узел суммы - 42,
увел суммы - 43,
узел Sin - 44,
узел Cos - 45,
узел памяти - 46,
узел памяти - 47,
умножитель - 48,
умножитель - 49,
умножитель - 50,
узел Sin - 51,
задатчик данных - 52
РЛС работает следующим образом.
В процессе движения луча антенны 1, перемещающегося за счет поворота вращающегося отражающего зеркала 1з и сформированного на неподвижном формирующем зеркале 1ф, усилитель мощности 12 усиливает поступающие на него из модулятора 13 высокочастотные импульсы и через циркулятор 6 передает их в антенну 1. Антенной 1 эти импульсы излучаются в пространство и распространяются в направлении выбранной области.
Когерентность сигнала определяется задающим генератором 11. Модулятор 13 осуществляет модуляцию высокочастотного сигнала f и формирует импульсы, подаваемые в усилитель мощности, имеющие заданную длительность (τи) и период повторения Тп, определяемый однозначной дальностью.
Высокочастотный сигнал f формируется синтезатором частоты 4, разработанным известными методами проектирования и изготовленным с использованием известной элементной базы.
От задающего кварцевого генератора 11 сигнал с входной частотой fг поступает в синтезатор частот 4, умножается до более высокой частоты f и используется в качестве несущей частоты радиолокационного сигнала, излучаемого антенной. Также в процессе движения луча сигналы, отраженные от объектов и поверхности, принимаются антенной и через циркулятор 6 поступают в СВЧ приемник 14. В СВЧ приемнике 14 эти сигналы в смесителе приемника смешиваются с сигналом синтезатора fc, в результате чего образуются сигналы промежуточной частоты fпр. Сигналы промежуточной частоты в усилителе промежуточной частоты УПЧ 16 усиливаются и поступают на фазовые детекторы 16 и 17, на которые от синтезатора поступает сигнал с частотой fпр, равной промежуточной частоте fпр. Причем на один из фазовых детекторов сигнал синтезатора "fпр" поступает со сдвигом на  .
.
За счет движения луча антенны 1 на выходах фазовых детекторов образуются синфазный I и квадратурный Q сигналы доплеровской частоты. Далее, оба сигнала I и Q с помощью аналого-цифровых преобразователей 18 и 19, управляемых с помощью синхросигнала fca, преобразуются в цифровую форму. С выходов АЦП 18 и 19 массив сигналов двух квадратур, поступающих в процессор сигналов 9, синхронизируемый сигналом tсп из блока 4 накапливается в памяти 20 и 21 для каждого элемента дальности и каждого периода повторения. Одновременно в процессе движения антенны для компенсации фазовых изменений в процессоре данных 10, синхронизируемым сигналом fпd, формируется опорная функция, комплексно сопряженная с сигналом, отраженным от объекта, в соответствии с формулой [1] . Для этого в дискретной форме формируется линейный член изменения фазы Δϕл опорной функции и ее квадратичный член Δϕкв.
Для формирования линейного члена Δϕл вначале вычисляется значение радиус-вектора ρ(Φ) по формуле [2]. Для этого с датчика угла 7 на узел СоsΦ 30 поступает значение угла поворота отражающего зеркала Φ, затем последовательно в узле делители 31 вычисляется  в узле разности 32 вычисляется
в узле разности 32 вычисляется  и в узле умножителя 33, на который из задатчика данных 5 поступает начальное значение радиус-вектора ρo, вычисляется радиус-вектор ρ(Φ)
и в узле умножителя 33, на который из задатчика данных 5 поступает начальное значение радиус-вектора ρo, вычисляется радиус-вектор ρ(Φ)
Это значение радиус-вектора поступает на умножитель 35, куда поступает значение угловой скорости вращения радиус-вектора Ω из узла 34. Значение угловой скорости вычисляется в узле 34 путем нахождения производной  . Для этого с датчика угла 7 в узел 34 поступает значение угла "Φ". В узле 35 определяется значение линейной скорости луча Vл = ρ(Φ)Ω.
. Для этого с датчика угла 7 в узел 34 поступает значение угла "Φ". В узле 35 определяется значение линейной скорости луча Vл = ρ(Φ)Ω.
Из узла 36 значение линейной скорости Vл поступает на узел 37, куда также поступит значение Cosαi, формируемого в узле 36 при подаче на его вход из задатчика данных 5 угла αi, в направлении которого проводится синтезирование.
Величина произведения Vл Соsαi поступает на умножитель 38, где умножается на величину  поступающую из задатчика данных 52. Значение
поступающую из задатчика данных 52. Значение  поступает на умножитель 40, где умножается на номер элемента дальности ε, поступающего из задатчика данных 52. В результате на выходе умножителя 40 формируется конкретное изменение фазы для каждого элемента дальности в периоде повторения
поступает на умножитель 40, где умножается на номер элемента дальности ε, поступающего из задатчика данных 52. В результате на выходе умножителя 40 формируется конкретное изменение фазы для каждого элемента дальности в периоде повторения  В умножителях 39 и 41 формируется изменение фазы от периода к периоду Тп для всех элементов дальности. Для этого из умножителя 37 значение Vл Cosαi последовательно в умножителях 39 и 41 умножается сначала на коэффициент
В умножителях 39 и 41 формируется изменение фазы от периода к периоду Тп для всех элементов дальности. Для этого из умножителя 37 значение Vл Cosαi последовательно в умножителях 39 и 41 умножается сначала на коэффициент  , а затем на коэффициент Кп, равный номеру периода Тп, в результате чего на выходе умножителя 41 будет
, а затем на коэффициент Кп, равный номеру периода Тп, в результате чего на выходе умножителя 41 будет  .
.
В узле суммы 42 формируется линейный член изменения фазы для каждого элемента дальности для К-го периода повторения.

Для формирования квадратичного изменения фазы Δϕкв опорной функции используются умножители 48, 49, 50, а также узел Sin2αi 51. В умножителе 48 значение скорости Vл из узла 35 вначале умножается само на себя, а затем умножается на коэффициент КТп, поступающий из задатчика данных 52 (линия е), затем величина Vл (КТп) поступает на умножитель 49, куда поступают коэффициент  и коэффициент
и коэффициент  из задатчика данных 52 (линия k). Затем эта величина поступает в умножитель 50, где умножается на значение Sin2αi, поступающее из узла Sin2αi51.
из задатчика данных 52 (линия k). Затем эта величина поступает в умножитель 50, где умножается на значение Sin2αi, поступающее из узла Sin2αi51.
C выхода умножителя 50 квадратичный член изменения фазы
поступает на узел суммы 43, где суммируется с линейным членом каждого элемента дальности в каждом периоде Тп. С выхода узла суммы изменение фазы опорной функции Δϕ = Δϕл+Δϕкв для каждого элемента дальности ε в каждом периоде повторения Тп поступают в узлы SinΔϕ и СоsΔϕ и накапливаются в памяти для каждого элемента дальности и каждого периода повторения.
По окончании движения луча антенны поступающие из памяти 20 и 21 отсчеты сигнала каждого элемента дальности каждого периода в умножителях 22, 23, 24 и 25 перемножаются с отсчетами для каждого элемента дальности и периода повторения опорной функции, поступающими из памяти 46 и 47. С выходов узлов разности 26 и суммы 27 сигналы двух квадратур подаются в процессор БПФ, где подвергаются гармоническому анализу по алгоритму быстрого преобразования Фурье.
Результатом преобразования сигналов из временной области в частотную являются азимутальные отсчеты двух квадратур радиолокационной информации в каждом элементе дальности. Затем отсчеты двух квадратур поступают на узел 29, где из них формируется модуль. Далее сигналы поступают в систему индикации 5.
Технико-экономическая эффективность предполагаемого изобретения заключается в двух моментах
- в уменьшении времени синтезирования (соответственно уменьшении времени получения радиолокационной информации),
- в уменьшении трудозатрат на эксплуатацию из-за исключения механических устройств перемещения антенны.
Как известно время синтезирования (соответственно время получения радиолокационной информации) определяется:
где Lсинт - линейный размер траектории движения луча антенны,
Vл - линейная скорость движения луча антенны.
В предлагаемой радиолокационной системе линейная скорость движения луча Vл определяется:
Vл = ρ(φ)Ω
где  - угловая скорость вращения отражающего зеркала.
- угловая скорость вращения отражающего зеркала.
Задаваясь начальным значением вектора ρ(о)=4 м и угловой скоростью вращения отражающего зеркала Ω=300 гр/с получаем значение линейной скорости луча Vл=42 м/с.
По проведенным оценкам возможности получения максимальной скорости движения антенны при использовании механических средств передвижения по направляющим можно получить линейную скорость перемещения не более Vл=20 м/с.
Таким образом время синтезирования, а значит и время получения РЛ информации в предлагаемой РЛС по сравнению с РЛС прототипа в два раза меньше.
Второй показатель - показатель экономической эффективности предлагаемой РЛС по сравнению с РЛС прототипа определяется тем фактом, что в предлагаемой РЛС отсутствуют механические средства передвижения антенны по направляющим, а значит в предлагаемой РЛС и отсутствуют дополнительные затраты на механическое обслуживание такой механической системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| ВЕРТОЛЕТНАЯ ИМПУЛЬСНО-ДОПЛЕРОВСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2001 |
|
RU2191401C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2531255C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА УПРАВЛЕНИЯ ПО РАДИОЛУЧУ | 2003 |
|
RU2249229C2 |
| СПОСОБ КОМПЕНСАЦИИ ФАЗОВЫХ НАБЕГОВ СИГНАЛА В БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СИСТЕМЕ И БОРТОВАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АНТЕННЫ ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2271019C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ВЕРТОЛЕТА | 2001 |
|
RU2206903C2 |
| СПОСОБ УГЛОВОГО РАЗРЕШЕНИЯ ЦЕЛИ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ ПРИ ОБЗОРЕ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ БОКОВОГО ОБЗОРА | 2000 |
|
RU2182714C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ МНОГОДИАПАЗОННАЯ МАСШТАБИРУЕМАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2011 |
|
RU2496120C2 |
| МНОГОКАНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2316021C2 |




Изобретение предназначено для использования в качестве береговых и корабельных РЛС для обзора земной и водной поверхности и обнаружения на ней объектов, в том числе малоразмерных. Технический результат изобретения заключается в уменьшении времени синтезирования и времени получения радиолокационной информации по сравнению с известной РЛС, имеющей одинаковый размер синтезированной апертуры антенны с предлагаемой. При этом исключается механическое перемещение антенны при сохранении функции получения высокого углового разрешения в азимутальной плоскости. Поставленная задача достигается тем, что в радиолокационную систему вводится нетрадиционно построенная антенна. В этой антенне, установленной неподвижно, лучу диаграммы направленности придается движение в горизонтальной плоскости с параллельным перемещением, при этом фазовый центр антенны перемещается в плоскости, перпендикулярной электрической оси. При движении луча антенны проводится облучение и когерентное суммирование отраженных сигналов в каждом элементе дальности. В результате когерентного суммирования создается искусственный (синтезированный) раскрыв антенны, существенно превышающий раскрыв реальной антенны и обеспечивающий высокое угловое разрешение. Возможность когерентного суммирования принятых сигналов обеспечивается путем компенсации фазовых изменений принимаемого сигнала. 7 ил.
Радиолокационная система, состоящая из антенны, передатчика, циркулятора, приемника, синтезатора частот, причем сигналы в смесителе приемника смешиваются с сигналом синтезатора частот fс, процессора сигналов, процессора данных, задающего генератора и индикатора, при этом вход-выход антенны через циркулятор соединен с выходом передатчика и первым входом приемника, выход которого соединен с первым входом процессора сигналов, при этом третий и четвертый входы приемника соединены соответственно с вторым и третьим выходами синтезатора частот, четвертый выход которого соединен со вторым входом процессора сигналов, шестой и седьмой выходы синтезатора частот соединены соответственно с первым и вторым входами передатчика, а пятый выход синтезатора частот соединен с первым входом процессора данных, при этом вход синтезатора частот соединен с выходом задающего генератора, выход процессора данных соединен с третьим входом процессора сигналов, выход которого соединен со входом индикатора, отличающаяся тем, что антенна содержит неподвижное формирующее зеркало, выполненное в вертикальной плоскости параболическим, а в горизонтальной плоскости - с профилем огибающей системы смещенных парабол, неподвижный облучатель и вращающееся отражающее зеркало, которое обеспечивает передачу излученной из неподвижного облучателя энергии на неподвижное формирующее зеркало, при этом выход датчика угла поворота вращающегося отражающего зеркала соединен со вторым входом процессора данных.
| РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2151407C1 |
| ВЕРТОЛЕТНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1997 |
|
RU2147136C1 |
| СПОСОБ ПОЛУЧЕНИЯ ТВОРОЖНОЙ ЗАПЕКАНКИ | 2002 |
|
RU2210227C1 |
| US 5315303 A, 24.05.1994 | |||
| US 5334981 A, 02.08.1994. | |||

