Изобретение относится к автоматическому регулированию и предназначено для систем автоматического сопровождения и наблюдения за подвижными объектами в пространстве преимущественно с качающегося основания и может быть использовано для управления воздушным движением.
Известна телевизионно-оптическая система сопровождения со следящим стробом, содержащая телевизионную камеру, устройство обработки видеосигнала, решающее устройство, привод наведения. [Барсуков Ф.И. Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с., стр.232, рис.7.17, аналог].
Недостатком данной телевизионной системы является недостаточная точность сопровождения целей с подвижного основания из-за отсутствия системы стабилизации оптической линии визирования и, как следствие, динамической инерционности исполнительного привода и контура электронного слежения. Эта система также неспособна к автоматическому захвату объекта на автосопровождение.
Известна также телевизионно-оптическая система [Грязин Г.Н., Оптико-электронные системы для обзора пространства: Системы телевидения. Л.: Машиностроение, Ленинградское отделение. - 1988, стр.8, 9, рис.4], содержащая последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство (в совокупности образующее пеленгатор) и исполнительный орган. Исполнительный орган, выполняющий функции блока наведения и стабилизации, кинематически связан с оптико-электронным (телевизионным) датчиком пеленгатора.
В известной системе переход в автоматический режим осуществляется посредством предварительного разворота пеленгатора на предназначенный для сопровождения объект таким образом, чтобы он оказался в пределах окна захвата внутри поля зрения. Однако при увеличении угловых скоростей и ускорений визирования объекта вероятность перехода в автоматический режим сопровождения падает. Это объясняется, с одной стороны, падением контраста изображения объекта, перемещающегося относительно растра (см. Грязин Г.Н. Оптико-электронные системы для обзора пространства: Системы телевидения. Л.: Машиностроение, Ленинградское отделение. - 1988, стр.209-212). С другой стороны, если предварительный разворот пеленгатора осуществляется в полуавтоматическом режиме с участием человека оператора, увеличиваются ошибки сопровождения высокоскоростного объекта оператором в силу ограниченности его динамических характеристик, приводящих к недопустимым переходным процессам в оптико-электронной системе, вызывающим срыв автосопровождения [1].
Недостатком оптических систем сопровождения является их высокая чувствительность к метеоусловиям и оптическим помехам, таким как атмосферная дымка, туман, дымо-пылевые помехи, засветки от ярких источников света и т.д., что объясняется работой телекамеры в видимой области спектра.
Известен также радиолокатор сопровождения, содержащий передатчик, приемник, последовательно соединенные антенну, двигатель вращения облучателя, генератор опорных напряжений, блок выделения сигналов ошибки, устройство наведения и стабилизации. Динамика следящих приводов. /Под ред. Л.В.Рабиновича. - М.: Машиностроение, 1982. - 496 с., стр.132, рис.2.26; Радиолокационные устройства./ Под ред. В.В.Григорина-Рябова. - М.: Советское радио. - 1970, стр.570, рис.21.12, аналог.
Недостатком радиолокатора является чувствительность к средствам радиоэлектронного излучения и затруднительность работы при малых углах места из-за близости подстилающей поверхности.
Наиболее близкой по технической сущности к изобретению является свободная от основных недостатков телевизионной и радиолокационной систем известная интегрированная локационно-оптическая система сопровождения за объектами в пространстве, в том числе и с подвижного основания, которая состоит из последовательно соединенных оптико-электронного пеленгатора, блока сравнения, первого коммутатора и блока фильтрации, последовательно соединенных блока памяти, второго коммутатора и сумматора, последовательно соединенных локационного пеленгатора и формирователя логики режимов, а также устройства наведения и стабилизации. Локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с выходным валом устройства наведения и стабилизации. Второй выход локационного пеленгатора подключен ко второму входу второго коммутатора, третий вход которого соединен с первым выходом оптико-электронного пеленгатора. Второй выход второго коммутатора связан со входом устройства наведения и стабилизации, чей второй выход подключен ко второму входу сумматора, выходом соединенного со входом оптико-электронного пеленгатора. Выход блока фильтрации соединен со вторым входом первого коммутатора, второй выход которого подключен к входу блока памяти. Второй выход оптико-электронного пеленгатора соединен со вторым входом формирователя логики режимов, чьи первый и второй выходы подключены соответственно к управляющим входам первого и второго коммутаторов, второй вход блока сравнения соединен со вторым выходом локационного пеленгатора [Патент РФ, №2197002, МПК7 G01S 13/66, 17/66 - прототип].
В известной системе сопровождения обеспечивается автоматический захват на автосопровождение объекта оптико-электронным пеленгатором за счет введения величин разъюстировки и текущих динамических ошибок на следящий строб. Повышается устойчивость сопровождения объекта за счет обеспечения возможности перехода сопровождения с локационного режима в оптический и обратно. Повышение устойчивости сопровождения достигнуто автоматизацией определения величины разъюстировки между локационным и оптическим каналами.
Указанные известные системы наведения (аналог, прототип) предназначены для сопровождения наблюдаемого объекта. Вместе с тем при срыве автоматического сопровождения оптической или локационной системами наблюдаемого объекта в случае перерыва оптической или локационной связи с сопровождаемым объектом в известных системах не обеспечивается автоматический возврат на автосопровождение. Кроме того, в известной системе не решены вопросы обеспечения требуемых точностных (статических, динамических) характеристик локационной и оптической систем сопровождения.
Задачей предлагаемого технического решения является обеспечение подслеживания локационным и оптическим пеленгаторами за сопровождаемым объектом при срыве автосопровождения с целью последующего автоматического восстановления режима сопровождения при повторной готовности пеленгаторов для захвата наблюдаемого объекта на автосопровождение и повышение точности и устойчивости сопровождения наблюдаемого объекта локационной и телевизионной системами.
Для решения указанной задачи в интегрированную наблюдательную систему сопровождения подвижных объектов, содержащую формирователь логики режимов, предназначенный для возможности перехода сопровождения подвижных объектов с локационного режима в оптический и обратно, а также с локационного или оптического режимов в инерционный и обратно, локационный и оптико-электронный пеленгаторы, первые выходы которых соединены соответственно с первым и вторым входами формирователя логики режимов, устройство наведения и стабилизации, включающее последовательно соединенные преобразователь стабилизированных координат в нестабилизированные и привод наведения и стабилизации, первый и второй коммутаторы, управляющие входы которых подключены соответственно к первому и второму выходу формирователя логики режимов, а локационный и оптико-электронный пеленгаторы механически соединены между собой и имеют кинематическую связь с первым выходом устройства наведения и стабилизации, введены последовательно соединенные устройство автоматического сопровождения и цифровая приборная следящая система, содержащая последовательно соединенные преобразователь «код-напряжение», второй коммутатор, интегрирующий привод и механическую передачу, первый выход которой соединен со входом устройства наведения и стабилизации, а второй - со вторым входом преобразователя «код-напряжение», последовательно соединенные третий коммутатор и блок управления оптико-электронной системы, а также блок инерционного сопровождения, при этом третий выход формирователя логики режимов соединены с входам управления третьего коммутатора, первый и второй вход блока инерционного сопровождения подключен соответственно ко второму выходу локационного пеленгатора и второму выходу устройства наведения и стабилизации, а выход - ко вторым входам первого и второго коммутаторов, второй выход оптико-электронного пеленгатора соединен с первым входом третьего коммутатора, выход блока управления оптико-электронной системы соединен со вторым входом второго коммутатора цифровой приборной следящей системы, третий выход локационного пеленгатора подключен к первому входу первого коммутатора.
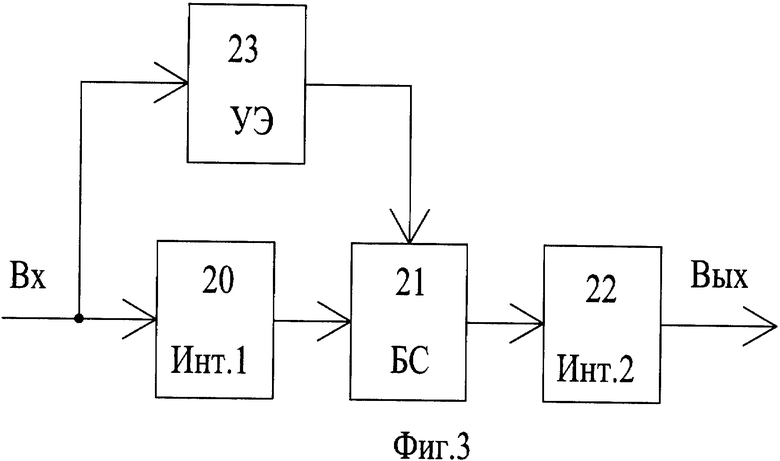
Устройство автоматического сопровождения включает в себя последовательно соединенные первый интегратор, блок сравнения, второй интегратор, а также усиливающий элемент, входом соединенный с входом первого интегратора и выходом со вторым входом блока сравнения, причем входом устройства автоматического сопровождения является вход первого интегратора, а выходом - выход второго интегратора.
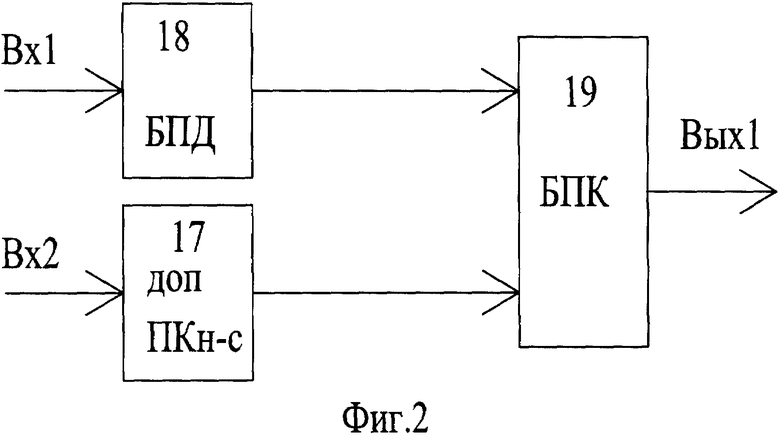
Блок инерционного сопровождения включает в себя преобразователь нестабилизированных координат в стабилизированные, блок прогнозирования дальности и блок прогнозирования координат, причем выход преобразователя нестабилизированных координат в стабилизированные подключен к первому входу блока прогнозирования координат, к второму входу которого подключен выход блока прогнозирования дальности. Первым входом блока инерционного сопровождения является вход преобразователя нестабилизированных координат в стабилизированные, вторым входом - вход блока прогнозирования дальности, а выходом - выход блока прогнозирования координат.
В качестве иллюстрации на чертежах приведены: на фиг.1 - функциональная схема интегрированной наблюдательной системы сопровождения, на фиг.2 - функциональная схема блока инерционного сопровождения, на фиг.3 - функциональная схема устройства автоматического сопровождения в виде интегродифференцирующего фильтра.
Все использованные блоки и устройства являются известными или могут быть выполнены из известных блоков, соединенных известным способом. Пеленгаторы могут быть выполнены, например, как в [2], [3], [4] или [5]. Коммутаторы могут быть выполнены на электромеханических реле, герконах, полупроводниковых ключах и т.п.Блок сравнения, интегратор, усиливающий элемент могут быть реализованы на операционных усилителях [6, 7] или цифровых микросхемах. Устройство наведения и стабилизации может быть реализовано как в прототипе на базе гидравлических, электрических [8] в т.ч. и на базе моментных двигателей и т.п., сервоприводов. При необходимости работы при больших углах возвышения или существенных значениях амплитуды качек, когда система сопровождения может потерять устойчивость в результате возникновения положительных перекрестных связей из-за несовпадения измерительной (стабилизированной) и исполнительной (нестабилизированной) системы координат устройство наведения и стабилизации может быть дополнено преобразователями координат. Например, устройство наведения и стабилизации может представлять собой последовательно соединенные преобразователь координат из стабилизированной системы координат пеленгатора в нестабилизированную систему координат сервопривода. Вопросы применения и построения преобразователей координат, уравнения для преобразования координат из стабилизированной системы в нестабилизированную и из нестабилизированной в стабилизированную, а также метод косвенной стабилизации двухосного измерительного устройства подробно описаны в [9] (стр.118-166). Параметры устройства автоматического сопровождения при известных требованиях к контуру вождения при известных требованиях к контуру сопровождения могут быть получены по правилам, изложенным в [10], с реализацией аппаратной части на основе методов, приведенных в [6]. Формирователь логики режимов может быть изготовлен на базе логических микросхем [11]. Преобразователь «код-напряжение» может представлять собой последовательно соединенные цифроаналоговый преобразователь (ЦАП) и сумматор, в котором суммируются сигнал углового положения с датчика приборной системы, и преобразованный ЦАП, цифровой сигнал с выхода устройства автоматического сопровождения. Подробно работа и описание различных схем ЦАП приведены в [12] (стр.171-182), [13] (стр.48-121).
Система содержит оптико-электронный 1 (ОЭПл) и радиолокационный 2 (ЛПл) пеленгаторы; формирователь логики режимов 3 (ФЛР), устройство наведения и стабилизации 4 (УНС), включающее преобразователь стабилизированных координат в нестабилизированные 5 (ПК) и привод наведения и стабилизации 6 (ПНС), первый коммутатор 7 (Ком 1), устройство автоматического сопровождения 8 (УАС), цифровую приборную следящую систему 9 (ЦПСС), включающую в себя преобразователь «код-напряжение» 10 (ПКН), второй коммутатор 11 (Ком 2), интегрирующий привод 12 (Инт.пр), механическую передачу 13 (МП); третий коммутатор 14 (Ком 3), блок управления оптико-электронной системы 15 (БУ ОЭС), блок инерционного сопровождения 16 (БИС).
Блок инерционного сопровождения содержит преобразователь нестабилизированных координат в стабилизированные 17 (ПКн-с), блок прогнозирования дальности 18 (БПД) и блок прогнозирования координат 19 (БПК).
Устройство автоматического сопровождения содержит первый интегратор 20 (Инт 1), блок сравнения 21 (БС), второй интегратор 22 (Инт 2), усиливающий элемент 23 (УЭ).
Работа системы осуществляется следующим образом. Пеленгаторы 1,2 ведут слежение за объектом одновременно и выдают сигналы, пропорциональные угловому отклонению сопровождаемого объекта от линии визирования независимо один от другого. Устойчивость сопровождения объекта и возможность восстановления сопровождения в автоматическом режиме в случае перерыва оптической связи или потери объекта пеленгатором обеспечивается построением интегрированной системы сопровождения подвижных объектов. Интегрированная система включает в себя локационный и оптико-электронный пеленгаторы, механически соединенные между собой и имеющие кинематическую связь с выходным валом устройства наведения и стабилизации. Пеленгаторы также последовательно соединены с формирователем логики режимов, подключенным к управляющим входам коммутаторов. Возможность перехода сопровождения с локационного режима в оптический и обратно обеспечивается переключением структур с помощью контактов коммутатора. Коммутаторы могут находиться в двух состояниях - включенном или выключенном. Включен - режим управления УНС от ЛПл, отключен - режим управления УНС от ОЭПл.
Локационный режим сопровождения объектов обеспечивается структурой контура, включающего приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по дальности и угловым координатам и устройство наведения и стабилизации. Приемник, передатчик, антенный переключатель, синхронизатор системы сопровождения по угловым координатам в совокупности представляют собой локационный пеленгатор. Локационный пеленгатор определяет положение объекта относительно оси диаграммы направленности антенны. Сигналы о положении объекта после звена коррекции подаются на вход устройства наведения и стабилизации, и оно осуществляет разворот локационного пеленгатора до тех пор, пока объект не окажется на оси диаграммы направленности. УНС позволяет также компенсировать качки носителя.
Оптический режим сопровождения система обеспечивается структурой, содержащей последовательно соединенные телевизионный датчик, устройство усиления и обработки сигнала, вычислительное устройство, в совокупности образующее оптико-электронный пеленгатор ОЭПл, устройство коррекции и УНС. Исполнительный орган УНС общий для ЛПл и ОЭПл. С учетом того, что управляющие сигналы содержат информацию о качках носителя, исполнительный орган выполняет функции устройства наведения и стабилизации и кинематически связан с оптико-электронным датчиком пеленгатора.
Сопровождение подвижного объекта происходит следующим образом. После того, как по сигналу от внешней системы пеленгатор развернут в направлении объекта с точностью, достаточной для взятия его на сопровождение, пеленгатор осуществляет его захват и начинает вырабатывать условные координаты цели относительно оптической оси или оси антенны радиолокатора. Для того, чтобы исключить из сигнала составляющую от качки и уменьшить перекрестные связи между каналами, сигнал с выхода пеленгатора пересчитывают в стабилизированную систему координат, например по зависимостям (1)
δε, δβ - сигналы рассогласования в нестабилизированной системе координат;
δεс, δβс - сигналы рассогласования в стабилизированной системе координат;
γ - угол скрутки нестабилизированной системы координат.([9], стр.138)
Полученный в пеленгаторе сигнал поступает на вход корректирующего устройства соответственно либо в БУ оптико-электронной системы, либо на вход УАС локационной системы, где проводятся такие операции над ним, чтобы, обеспечивая устойчивость системы управления, добиться требуемых параметров по точности и характеристикам переходных процессов [10].
Поскольку диаграмма направленности луча (1-2 град) локационного пеленгатора (2) существенно больше величины следящего строба (1-5 мрад) оптико-электронного пеленгатора (1) и, как правило, превышает по величине погрешность целеуказания, первоначально объект берется на автосопровождение локационным пеленгатором. Он выдает признак автосопровождения объекта в формирователь логики режимов (3), который обеспечивает подключение сигнала с третьего выхода ЛПл через контакты первого коммутатора после коррекции в устройстве автоматического сопровождения УАС (8) и преобразования цифрового сигнала УАС в аналоговый в ЦПСС (9) ко входу устройства наведения и стабилизации УНС (4). Выходной вал УНС разворачивает пеленгаторы (1, 2) или их передающие устройства в сторону объекта таким образом, чтобы объект оказался на оси диаграммы направленности ЛПл (2). Поступающие на вход УНС (4) стабилизированные координаты визируемого объекта преобразуются в нестабилизированные в преобразователе координат (5). Он может быть реализован, например, с использованием зависимостей, предложенных [9]:
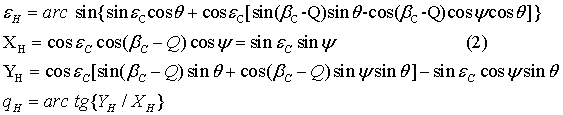
где εH, qH - углы наведения УНС в нестабилизированной системе координат;
εC, βC - углы наведения УНС в стабилизированной системе координат;
Q, ψ, θ - углы курса, тангажа и крена носителя соответственно.
Следует отметить, углы качек носителя используются также в ПК из нестабилизированной системы координат в стабилизированную для расчета угла скрутки γ наряду со стабилизированными координатами. Поскольку использование этой информации очевидно, и она может быть получена от внешней системы или выработана самой интегрированной наблюдательной системой сопровождения, подробно эти связи не описываются.
Однако погрешность определения координат объекта с помощью ЛПл (2) существенно выше, чем с помощью ОЭПл (1). Поэтому целесообразно перевести управление устройством наведения и стабилизации (4) на сигнал от ОЭПл. Для этого необходимо обеспечить попадание изображения от объекта в часть поля зрения ОЭПл (1), соответствующую стробу. Поскольку процессу сопровождения, особенно за высокоскоростными объектами с быстродвижущегося носителя, присущи динамические ошибки, необходимо обеспечить перемещение следящего строба по полю зрения в соответствии с текущей величиной ошибки. Когда изображение объекта оказывается в стробе и сигнал от него становится отличным от фона, ОЭПл (1) выдает в ФЛР (3) информацию об этом со своего первого выхода. ФЛР (3) подключает с помощью второго коммутатора Ком 2 (11) вход УНС (4) через интегрирующий привод Инт.пр (12) ЦПСС (9) к выходу БУ ОЭС (15) и отключает УАС (8) от управляющего входа УНС и с помощью третьего коммутатора Ком 3 (14) подключает сигнал со второго выхода ОЭПл (1) ко входу БУ ОЭС (15). В этом режиме выходной вал УНС (4) стремится развернуть пеленгатор так, чтобы изображение объекта оказалось в центре растра, соответствующем положению оптической оси ОЭПл (1). Точность слежения за объектом возрастает. Дополнительный эффект повышения точности определения координат достигается за счет того, что сигнал от УНС подается на контур следящего строба, при этом сигнал УНС выполняет роль компенсирующей связи, разгружающей контур следящего строба.
В ряде практических применений интегрированной наблюдательной системы сопровождения возникает задача обнаружения и последующего сопровождения высокодинамичных подвижных объектов. В этом случае для устойчивого сопровождения подвижного объекта от систем управления требуется высокая точность сопровождения. Качество наведения и сопровождения подвижных объектов (время регулирования, перерегулирование) и динамическая точность в радиолокационной системе обеспечиваются за счет устройства автоматического сопровождения УАС (8), функциональная схема которого показана на фиг.2. УАС имеет в своем составе два интегратора и создает в контуре радиолокационного сопровождения астатизм второго порядка по управлению. Введение астатизма второго порядка в контур сопровождения локационной системы обеспечивает требуемые точностные характеристики контура сопровождения. Для обеспечения стабильности характеристик интеграторов, входящих в состав УАС (8), во всех условиях эксплуатации, устройство обеспечивает коррекцию и преобразование сигнала управления в цифровом виде. Согласование цифрового управляющего сигнала УАС (8) и аналогового управления устройством наведения и стабилизации осуществляет ЦПСС (9), которая в контуре локационного сопровождения преобразует цифровой сигнал УАС в аналоговый сигнал, пропорциональный углу поворота привода наведения в стабилизированной системе координат. Обеспечение характеристик точности телевизионной системы выполнено введением астатизма по управлению за счет перевода цифровой приборной следящей системы (9), преобразующей код УАС (8) в углы поворота, в интегрирующий режим с помощью второго коммутатора (11).
В процессе сопровождения подвижного объекта интегрированной наблюдательной системой сопровождения (локационным или оптическим каналами) в силу различных причин возможны пропадания оптической или локационной связи с сопровождаемым объектом. В этом случае контур сопровождения размыкается и происходит срыв автосопровождения и потеря визируемого объекта из диаграммы направленности локационной системы или поля зрения оптической системы. При отсутствии специальных устройств для восстановления автоматического сопровождения требуется повторить поиск объекта оператором, ввод его в центр поля зрения (диаграммы направленности), дополнительная готовность пеленгаторов и только затем переход в режим автоматического сопровождения наблюдаемого объекта. Вышеперечисленные процедуры занимают значительное время из отведенного системе на сопровождение объекта, в связи с чем задачи, решение которых обеспечивает система, могут быть не выполнены. Для автоматического восстановления автосопровождения в предлагаемом техническом решении используется блок инерционного сопровождения БИС (16). БИС с момента пропадания в ФЛР (3) сигнала Авт рассчитывает инерционные координаты визируемого объекта. В основу формул расчета заложена гипотеза равномерного прямолинейного движения объекта, что с учетом реальных скоростей объектов до 1000 м/сек обеспечивает высокую точность расчета координат. Рассчитанные координаты через коммутаторы Ком 1, Ком 3 (7, 14), блоки коррекции (УАС-ЦПСС, БУ ОЭС) подаются на вход УНС (4), которое выполняет разворот пеленгаторов за сопровождаемым объектом. При готовности пеленгаторов повторно «взять» объект на автосопровождение (восстановление оптической или локационной связи с подвижным объектом) в ФЛР(З) восстанавливается сигнал Авт, и по команде с ФЛР (3) БИС (16) с помощью коммутаторов Ком1, Ком3 (7, 14) отключается от БУ ОЭС (15) или УАС (8) и подключается сигнал локационного (или оптико-электронного) пеленгатора для продолжения автоматического сопровождения подвижного объекта. В момент срыва автосопровождения координаты сопровождаемого объекта, замеренные локационным пеленгатором, сравниваются со стабилизированными координатами сопровождаемого объекта, замеренными датчиками ПНС (6). Нестабилизированные координаты с выхода ПНС (6) для сравнения с сигналом локационного пеленгатора при срыве автосопровождения преобразуются в стабилизированные координаты в преобразователе координат ПКн-с (17) блока инерционного сопровождения БИС (16), для чего сигнал со второго выхода УНС (4) подается на вход ПКн-с (17) в БИС (16). Если разность сигналов с локационного пеленгатора ЛПл (2) и преобразователя координат ПКн-с (17) превышает половину ширины диаграммы направленности локационного пеленгатора или половины окна следящего строба оптико-электронной системы, сигнал рассогласования подается на вход УНС (4) для разворота пеленгаторов и компенсации рассогласования в сигналах пеленгатора и датчика ПНС (6). После входа ошибки в заданную трубку блоком инерционного сопровождения БИС (16) рассчитываются инерционные координаты сопровождаемого объекта в соответствии с приведенной ниже логикой.
Логика работы блока инерционного сопровождения:
- инерционное сопровождение возможно через 1 сек после начала сопровождения объекта;
- по значениям локационных координат на момент срыва автосопровождения вычисляются сферические координаты объекта;
- по сферическим координатам с целью повышения точности вычислений вычисляются прямоугольные (декартовые) координаты;
- вычисляются сглаженные координаты объекта;
- по сглаженным локационным координатам вычисляются сглаженные сферические координаты объекта, по которым вычисляются угловые координаты подвижного объекта, - полученные значения угловых координат используются для управления ПНС и наблюдательной системой.
Формулы для вычисления по приведенному алгоритму приведены ниже - выражения 3-14.
Выход из режима инерционного сопровождения осуществляется
- при переходе в режим автосопровождения;
- при поступлении релейного сигнала «сброс» из ФЛР;
- по истечении времени инерционного сопровождения (максимальное время инерционного сопровождения - 20 сек).
Применение предложенного алгоритма с пересчетом сферических координат в прямоугольные (декартовые), а также использование алгоритмов сглаживания локационных координат обеспечивает высокую точность расчета координат объекта и, как следствие, высокую точность подслеживания пеленгаторами за подвижным объектом и допускает в отдельных случаях (ограниченное время сопровождения, малоподвижный объект, незначительные скорости и ускорения наведения) решение обеспечиваемых наблюдательной системой задач с использованием блока инерционного сопровождения без восстановления автосопровождения визируемого объекта наблюдательной системой.
Вычисление инерционных координат в блоке инерционного сопровождения производится по следующим зависимостям:
1. По данным локационного пеленгатора вычисляются сферические координаты сопровождаемого объекта
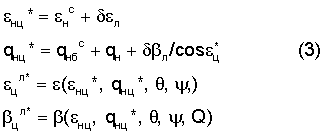
где 



qH - нестабилизированный угол горизонтального наведения, измеряемый в плоскости погона башни от продольной оси объекта до проекции линии визирования и отсчитываемый по часовой стрелке;
εH - нестабилизированный угол места объекта, измеряемый в плоскости, проходящей через линию визирования, и перпендикулярный плоскости погона, от линии пересечения этой плоскости с плоскостью погона до линии визирования;
Q - курсовой угол объекта, отсчитываемый по часовой стрелке от основного направления до проекции оси объекта по горизонтальной плоскости;
θ - угол поперечной качки, измеряемый от проекции поперечной оси объекта на горизонтальной плоскости до поперечной оси объекта;
ψ - угол продольной качки, отсчитываемый от горизонтальной проекции продольной оси объекта до поперечной оси объекта;
X, Y, H - проекции наклонной дальности на оси прямоугольной системы координат;
Подстрочные символы:
т - текущий, с - стабилизированный, и - инерционный, л - локаторный, б - башня, * - признак расчетной величины.
2. Локационные прямоугольные координаты вычисляются по формулам
3. Параметры движения объекта определяются по формулам
где  - значения скоростей на момент перехода в режим инерционного сопровождения;
- значения скоростей на момент перехода в режим инерционного сопровождения;
 - значения прямоугольных сглаженных координат на момент перехода в режим инерционного сопровождения;
- значения прямоугольных сглаженных координат на момент перехода в режим инерционного сопровождения;
Тис - время инерционного сопровождения.

4. Прямоугольные сглаженные скорости и ускорения объекта вычисляются по формулам

Зависимости (12) определяют координаты подсчетом числа импульсов за определенный интервал. В этом случае значение параметра равно среднему значению, а не мгновенному в момент измерения параметра.
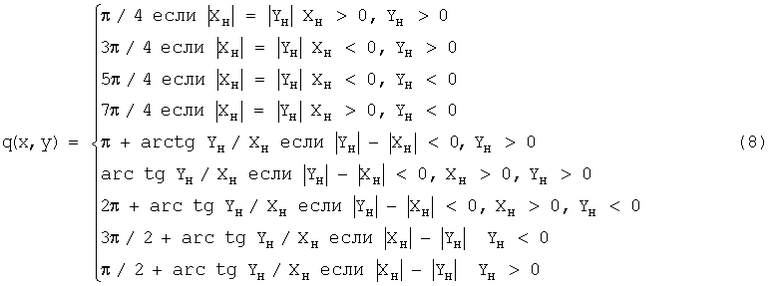
5. Дальность до объекта и сферические сглаженные координаты определяются по соотношениям
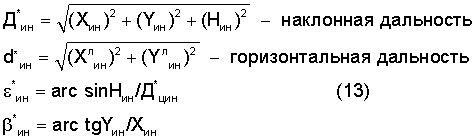
значения углов при определении величины arc tg Yин/Хин вычисляются с учетом формулы (8).
6. По полученным данным вычисляются угловые инерционные скорости объекта
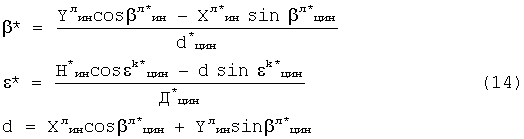
Полученные расчетные значения углов и дальности используются для управления ПНС и для работы систем управления оптического и локационного пеленгаторов.
Таким образом, дополнительное повышение точности работы систем сопровождения обеспечивается за счет введения в систему наведения пеленгаторов дополнительных устройств, повышающих порядок астатизма системы наведения относительно управляющего воздействия. Повышение надежности автосопровождения достигается как за счет уменьшения ошибок наведения, так и использованием дополнительного контура, обеспечивающего подслеживание пеленгаторов за визируемым объектом с привлечением информации, вычисленной в блоке инерционного сопровождения. Дополнительное повышение точности и обеспечение возможности восстановления автосопровождения при возобновлении прерванных оптической или локационных связей с наблюдаемым объектом создает условия для устойчивого сопровождения пеленгаторами различных объектов, находящихся в пределах их полей зрения (диаграмм направленности).
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Цибулевский И.Е. Человек как звено следящей системы. - М.: Наука, 1981. - 288 с., стр.93-108.
2. Госсорг Ж. Инфракрасная термография. Основы, техника, применение / Пер. с франц. - М.: Мир, 1988. - 680 с., стр 344-346, стр.375, рис.а, аналоги.
3. Максимов М.В., Горгонов Г.И. Радиоэлектронные системы самонаведения. - М.: Радио и связь, 1982. - 304 с., стр.117-120, рис.3.28.
4. Барсуков Ф.И., Величкин А.И., Сухарев А.Д. Телевизионные системы летательных аппаратов. - М.: Советское радио, 1979. - 256 с.
5. Радиолокационные устройства / Под ред. В.В.Григорина-Рябова. - М.: Советское радио, 1970. - 680 с., стр.570, рис.21.12.
6. Справочник по интегральным микросхемам. - М.: Энергия, 1981.
7. Тетельбаум И.М., Шнейдер Ю.Р. 400 схем для АВМ. - М.: Энергия, 1978. - 246 с.: ил.
8. Чиликин М.Г., Сандлер А.С.Общий курс электропривода. - М.: Энергоиздат, 1981. - 576 с.
9. Ривкин С.С. Стабилизация измерительных устройств на качающемся основании. - М.: Наука, 1978. - 320 с.
10. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. - М.: Наука, 1973 - 768 с.
11. Павлов В.В. Управляющие устройства логического типа. - М.: Энергия. - 1968.
12. Коффрон Дж., Лонг В. Расширение микропроцессорных систем / Пер. с англ.; под ред. П.В.Нестерова. - М.: Машиностроение, 1987. - 320 с.
13. Федорков Б.Г., Телец В.А. Микросхемы ЦАП И АЦП: функционирование, параметры, применение. - М.: Энергоатомиздат, 1990. - 320 с.: ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2012 |
|
RU2498345C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| ИНТЕГРИРОВАННАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ АВТОМАТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2321020C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СЛЕДЯЩАЯ ЛОКАЦИОННО-ОПТИЧЕСКАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2006 |
|
RU2325671C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| СЛЕДЯЩАЯ СИСТЕМА | 2003 |
|
RU2252435C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
Изобретение относится к области систем сопровождения и наблюдения за подвижными объектами и может быть использовано для управления воздушным движением. Достигаемый технический результат изобретения заключается в повышении устойчивости работы системы управления за счет повышения точности сопровождения наблюдаемого объекта и восстановлении автоматического сопровождения подвижного объекта после срыва автоматического сопровождения при последующем возобновлении прерванной оптической или локационной связи с наблюдаемым объектом. Указанный результат достигается за счет того, что интегрированная наблюдательная система сопровождения содержит функционально связанные между собой локационный и оптико-электронный пеленгаторы, формирователь логики режимов и устройство наведения и стабилизации, первый и второй коммутаторы, устройство автоматического сопровождения, цифровая приборная следящая система, включающая преобразователь «код-напряжение», первый коммутатор, интегрирующий привод и механическую передачу, блок управлении оптико-электронной системой, блок инерционного сопровождения, третий коммутатор. 2 з.п. ф-лы, 3 ил.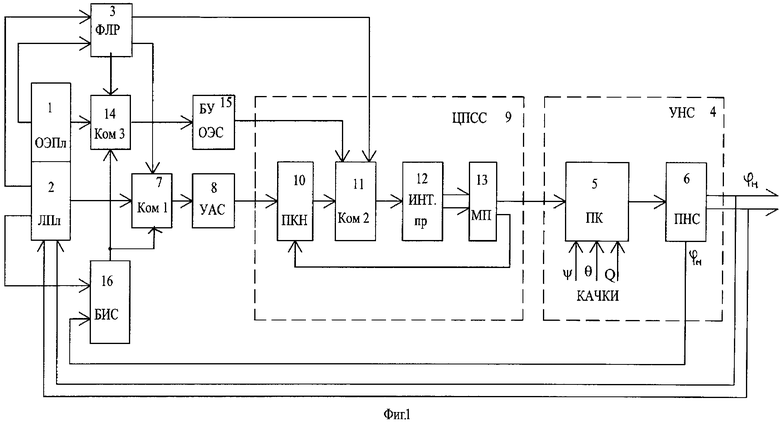
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2197002C2 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032916C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ (ВАРИАНТЫ) | 2001 |
|
RU2217775C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБЪЕКТА СЛЕЖЕНИЯ | 2004 |
|
RU2284552C2 |
| US 4401886 А, 30.08.1983 | |||
| US 2006293856 A1, 28.12.2006 | |||
| ЕР 1531446 A1, 18.05.2005 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "АКУЛА С ПОМИДОРАМИ" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2341994C1 |

