Изобретение относится к ракетной технике и предназначено для использования в комплексах вооружения телеуправляемых ракет.
Известен способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, определение углового рассогласования между координатами ракеты и линии визирования цели (ЛВЦ), формирование команды управления ракетой, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ, и передачу этой команды управления на ракету для ее наведения на цель [1].
Известна система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале управления тангажа и курса последовательно соединенные пеленгатор ракеты, блок формирования углового рассогласования между координатами ракеты и ЛВЦ, второй вход которого подключен к выходу пеленгатора цели, блок формирования команды управления, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ, и устройство передачи команд управления на ракету [1].
При наведении ракеты известным способом и системой наведения, его реализующей, на подвижную цель и особенно на высокоскоростную, летящую на большой высоте (или с большим курсовым параметром), требуемая (кинематическая) траектория движения ракеты имеет большую кривизну и, следовательно, необходимо большое потребное нормальное ускорение ракеты для движения по требуемой (кинематической) траектории, что является существенным недостатком этого способа и системы, его реализующей, т.к. при этом предъявляются высокие требования к маневренности ракеты (располагаемой перегрузке).
Наиболее близким к предлагаемому является способ наведения телеуправляемой ракеты, включающий измерение координат цели и ракеты, формирование в вертикальной и наклонной плоскостях наведения углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, формирование команды управления ракетой, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты, и передачу команды управления на ракету [1].
Наиболее близкой к предлагаемой является система наведения телеуправляемой ракеты, состоящая из пеленгатора цели и контура управления ракетой, включающего в каждом канале управления тангажа и курса блок формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ и последовательно соединенные пеленгатор ракеты, блок формирования углового рассогласования между координатами ракеты и ЛВЦ, второй вход которого подключен к выходу пеленгатора цели, сумматор, второй вход которого подключен к выходу блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, и устройство передачи команды управления на ракету [1].
Суть известных способа наведения телеуправляемой ракеты и системы наведения, его реализующей, заключается в следующем. Так как наведение ракеты на цель осуществляется в двух взаимно перпендикулярных плоскостях - вертикальной и наклонной ([2], стр.56), то для спрямления траектории наведения, после измерения координат ракеты и цели, к угловому рассогласованию между координатами ракеты и ЛВЦ добавляется упреждающий угол смещения кинематической траектории наведения ракеты, затем формируется команда управления ракетой, пропорциональная угловому рассогласованию между координатами ракеты и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты. Такой способ наведения и система, его реализующая позволяют уменьшить кривизну траектории наведения и снизить потребные перегрузки ракеты за счет углового смещения ее кинематической траектории наведения. Вместе с тем известные способ наведения ракеты и система, его реализующая, при наведении ракеты на подвижную цель и особенно на высокоскоростную, движущуюся на большой высоте (или с большим курсовым параметром), в точке встречи (т.е. при равенстве дальностей и совпадении угловых координат ракеты с соответствующими координатами цели) реализуют большие углы встречи, под которыми понимаются углы между направлениями векторов скорости цели и ракеты в соответствующих плоскостях наведения. Угол встречи, например, в вертикальной плоскости наведения определяется соотношением

где ΘЦ - угол наклона траектории цели к горизонту;
ΘР - угол наклона траектории ракеты к горизонту.
Угол наклона траектории цели ΘЦ определяется направлением движения цели. Угол наклона траектории ракеты ΘР определяется параметрами движения цели, летно-баллистическими характеристиками ракеты и способом наведения. Для известного способа наведения телеуправляемой ракеты угол наклона траектории определяется выражением

где εЛВЦ - угол места ЛВЦ;
ΔεУ - угол смещения кинематической траектории ракеты относительно ЛВЦ (угол упреждения);
 - угловая скорость ЛВЦ;
- угловая скорость ЛВЦ;
 - угловая скорость смещения кинематической траектории движения ракеты относительно ЛВЦ;
- угловая скорость смещения кинематической траектории движения ракеты относительно ЛВЦ;
VР - скорость ракеты;
DР - дальность до ракеты.
При перехвате цели на встречных курсах (когда ΘЦ=-180°), даже не маневрирующей, угол встречи ракеты с целью, в зависимости от параметров движения цели (угловой скорости ) в соответствии с соотношением (2), может достигать значений в диапазоне 0-90°. Так как в точке встречи время подрыва боевой части ракеты и область разлета осколков боевой части зависят от направлений и величин скоростей цели и ракеты (т.е. углов встречи), то при определенных больших углах встречи цель может не оказаться в области возможного поражения (области разлета осколков боевой части) ([2], стр.166-169).
Указанное обстоятельство определяет недостаток известных способа наведения и системы, его реализующей, т.к. их использование снижает эффективность поражения высокоскоростной цели, движущейся на большой высоте (или большим курсовым параметром), и предъявляет особые требования к боевому снаряжению ракеты.
Задачей настоящего изобретения является повышение эффективности поражения высокоскоростной цели, движущейся на большой высоте (или с большим курсовым параметром), за счет обеспечения требуемых углов встречи ракеты с целью, в том числе нулевых, независимо от параметров движения цели.
Поставленная задача достигается тем, что в способе наведения телеуправляемой ракеты, включающем измерение координат цели и ракеты, формирование в вертикальной и наклонной плоскостях наведения углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, формирование команды управления ракетой, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты, и передачу команды управления на ракету, формируют для каждой плоскости движения ракеты модель траектории сопряжения координат ракеты и цели в виде полиномов соответствующих координат ракеты в функции времени, оставшегося до встречи ракеты с целью, в текущем времени, после измерения координат ракеты и цели прогнозируют координаты точки встречи ракеты с целью и время, оставшееся до их встречи, формируют для каждой плоскости движения в соответствии с текущими измеренными координатами ракеты, координатами прогнозируемой точки встречи и значениями требуемых углов встречи ракеты с целью граничные условия для модели траектории сопряжения координат ракеты и цели, определяют с учетом сформированных граничных условий параметры модели траектории сопряжения координат ракеты и цели, преобразуют координаты траектории сопряжения координат ракеты и цели, полученные с помощью модели, в координаты углового смещения кинематической траектории наведения ракеты относительно ЛВЦ в каждой плоскости наведения и далее наведение ракеты проводят с учетом полученного углового смещения кинематической траектории наведения ракеты относительно ЛВЦ.
Поставленная задача достигается также тем, что в систему наведения телеуправляемой ракеты, содержащую пеленгатор цели и контур управления ракетой, включающий в каждом канале управления тангажа и курса блок формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, последовательно соединенные пеленгатор ракеты, блок формирования углового рассогласования между координатами ракеты и ЛВЦ, второй вход которого подключен к выходу пеленгатора цели, сумматор, второй вход которого подключен к выходу блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, блок формирования команды управления, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, и устройство передачи команды управления на ракету, введены первый преобразователь координат, первый, второй и третий входы которого соответственно подключены к первому, второму и третьему выходам пеленгатора цели, второй преобразователь координат, первый, второй и третий входы которого соответственно подключены к первому, второму и третьему выходам пеленгатора ракеты, и последовательно соединенные дифференцирующе-сглаживающее устройство, блок прогнозирования, блок формирования граничных условий и блок формирования модели траектории сопряжения координат ракеты и цели, при этом входы дифференцирующе-сглаживающего устройство подключены к соответствующим выходам первого и второго преобразователей координат, а выходы блока формирования модели траектории сопряжения координат ракеты и цели подключены к соответствующим входам блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ.
Введение в способ и систему наведения ракеты новых соответственно операций и блоков с их связями позволило по сравнению с известными обеспечить требуемые углы встречи ракеты с целью, в том числе и нулевые, и соответственно повысить эффективность ракеты. Суть предлагаемого изобретения заключается в том, что прогнозируют координаты точки встречи ракеты с целью и время, оставшееся до их встречи, сопрягают текущие координаты ракеты с текущими координатами прогнозируемой точки встречи ракеты с целью кинематической траекторией, параметры которой формируют по модели, исходя из условий обеспечения встречи ракеты с целью с заданными углами встречи, и наведение ракеты осуществляют с угловым смещением относительно ЛВЦ, определяемым полученной траекторией сопряжения.
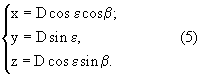
Предлагаемый способ наведения телеуправляемой ракеты заключается в следующем. Осуществляют сопровождение и измерение текущих сферических координат ракеты εР, βρ, DР и цели εЦ, βЦ, DЦ, которые преобразуют в прямоугольные координаты соответственно ракеты хР, уР, zР и цели хЦ, уЦ, zЦ по известным соотношениям
Полученные прямоугольные координаты ракеты и цели дифференцируют, сглаживают для подавления шумов и получают соответственно текущие скорости и ускорения изменения прямоугольных координат ракеты  ,
,  ,
,  ,
,  ,
,  ,
,  и цели
и цели  ,
,  ,
,  ,
,  ,
,  ,
,  .
.
В текущем времени по полученным прямоугольным координатам ракеты хР, уР, zP, цели хц, уЦ, zЦ и их производных определяют время, оставшееся до встречи ракеты с целью tВ, и прогнозируют координаты точки встречи ракеты с целью хВ, уВ, zВ.
Текущее, оставшееся время до встречи ракеты с целью определяют, например, по выражению
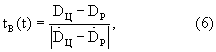
где t - текущее время;
Dц - измеренная дальность до цели;
DР - измеренная дальность до ракеты;
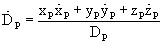 - скорость изменения дальности до ракеты;
- скорость изменения дальности до ракеты;
 - скорость изменения дальности до цели.
- скорость изменения дальности до цели.
Текущие, прогнозируемые координаты точки встречи ракеты с целью хВ, уВ, zВ соответственно определяются, например, соотношениями
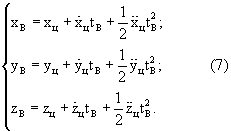
Движение цели и ракеты в пространстве осуществляется в трех взаимно перпендикулярных плоскостях, а их траектории движения определяются текущими, прямоугольными координатами соответственно цели xц, уц, zц и ракеты хР, уР, zР. В точке встречи траектория ракеты и траектория цели должны не только пересекаться, но и быть сопряженными ([3], стр.464, 471). Степень и условия сопряжения (касания траектории ракеты и цели) определяются требуемыми углами встречи. Так, например, при нулевых углах встречи в встречной зоне ("лобовая атака") траектория ракеты в точке встречи должна быть перпендикулярна нормали к траектории цели, т.е. касательные к траектории ракеты и к траектории цели должны совпадать.
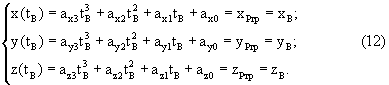
Для сопряжения траекторий ракеты и цели формируют для каждой плоскости движения ракеты модель траектории сопряжения координат ракеты и цели в виде полиномов соответствующих координат ракеты в функции времени, оставшегося до встречи ракеты с целью tВ(t)
где ах3, ах2, ах1, ах0; aу3, aу2, ау1, ау0; аz3, az2, az1, az0 - параметры (коэффициенты) модели траектории сопряжения.
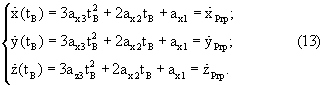
Скорости изменения координат модели сопряжения (8) определяются выражениями
Функция времени, оставшегося до встречи ракеты с целью, tB(t) в выражениях (8) и (9) изменяется в пределах от некоторого значения tB, соответствующего текущим координатам ракеты, и до конечного момента tB=0, соответствующего моменту встречи ракеты с целью.
Для определения параметров модели траектории сопряжения координат ракеты и цели аx3, аx2, аx1, аx0; ау3, ау2, ау1, ау0; аz3, аz2, аz1, аz0, формируют граничные (краевые) условия траектории сопряжения.
Граничные условия включают в себя начальные граничные условия и конечные граничные условия. Начальные граничные условия для координат x(tB), у(tB), z(tB) системы уравнений (8) и скоростей x(tB), у(tB), z(tB) системы уравнений (9) соответствуют текущему моменту времени t и соответственно определяются полученными, текущими координатами ракеты xр, ур, zp (5) и скоростями их изменения , , . Для начальных граничных условий траектории сопряжения выполняются соотношения
Конечные граничные условия для траектории сопряжения по координатам x(tB), у(tB), z(tB) и их скоростям  ,
,  ,
,  соответствуют конечному моменту времени - моменту встречи ракеты с целью tB=0 и соответственно определяются требуемыми координатами ракеты xРтр, уРтр, zРтр и скоростями изменения координат ракеты
соответствуют конечному моменту времени - моменту встречи ракеты с целью tB=0 и соответственно определяются требуемыми координатами ракеты xРтр, уРтр, zРтр и скоростями изменения координат ракеты  ,
,  ,
,  в момент встречи с целью. Требуемые координаты ракеты хРтр, уРтр, zРтр определяются из условия необходимости встречи ракеты с целью, т.е. требуемые координаты ракеты хРтр, уРтр, zРтр равны соответствующим прогнозируемым координатам точки встречи ракеты с целью хВ, уВ, zB. Требуемые скорости изменения координат ракеты , , определяются условием сопряжения траекторий ракеты и цели и задается углами наклона ΘP и поворота ΨP траектории ракеты в момент встречи с целью. В свою очередь, углы наклона ΘP и поворота ΨР траектории ракеты определяются требуемыми (заданными) углами встречи ракеты с целью. Таким образом, для конечных граничных условий траектории сопряжения выполняются соотношения
в момент встречи с целью. Требуемые координаты ракеты хРтр, уРтр, zРтр определяются из условия необходимости встречи ракеты с целью, т.е. требуемые координаты ракеты хРтр, уРтр, zРтр равны соответствующим прогнозируемым координатам точки встречи ракеты с целью хВ, уВ, zB. Требуемые скорости изменения координат ракеты , , определяются условием сопряжения траекторий ракеты и цели и задается углами наклона ΘP и поворота ΨP траектории ракеты в момент встречи с целью. В свою очередь, углы наклона ΘP и поворота ΨР траектории ракеты определяются требуемыми (заданными) углами встречи ракеты с целью. Таким образом, для конечных граничных условий траектории сопряжения выполняются соотношения
где требуемые скорости изменения координат ракеты , , определяются, например, известными соотношениями
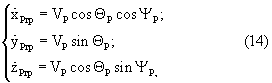
где VP - скорость ракеты в прогнозируемый момент встречи ракеты с целью, являющаяся известной летно-баллистической функцией для данной ракеты ([2], стр.22);
ΘP, ΨP - соответственно требуемые углы наклона и поворота траектории ракеты в момент встречи, определяются из условия (1):
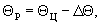
где ΔΘ, ΔΨ - требуемые (заданные) углы встречи.
При ΔΘ=ΔΨ=0, т.е. при требуемых нулевых встречных углах, ΘP=ΘЦ и ΨР=ΨЦ.
Углы ΘЦ, ΨЦ задают направление движения цели и могут определяться, например, из соотношений
Решая в текущем времени полученные системы уравнений (10)-(13), например, методом исключения ([4], стр.240-242), находят текущие параметры траектории сопряжения координат ракеты и цели аx3, аx3, аx1, аx0; ау3, ау2, ау1, ау0; аz3, аz2, аz1, аz0.
Далее по выражениям (8), с учетом полученных параметров, определяют текущие координаты траектории сопряжения координат ракеты и цели х(tB), у(tB), z(tB).
Преобразование полученных прямоугольных координат траектории сопряжения координат ракеты и цели x(tB), у(tВ), z(tB) в сферические (угловые) координаты ракеты соответственно в вертикальной и наклонной плоскостях наведения осуществляется по выражениям
Углы смещения кинематической траектории наведения ракеты относительно ЛВЦ соответственно в вертикальной и наклонной плоскостях наведения определяются выражениями
Полученные углы смещения кинематической траектории наведения ракеты относительно ЛВЦ ΔεК, ΔβК суммируют соответственно с угловыми рассогласованиями между координатами ракеты и ЛВЦ в соответствующих плоскостях наведения, затем формируют команды, пропорциональные угловому рассогласованию между координатами ракеты и ЛВЦ с учетом полученного углового смещения кинематической траектории наведения ракеты относительно ЛВЦ, и далее сформированные команды передают на ракету. Ракета, отрабатывая команды управления, движется по кинематической траектории сопряжения, обеспечивая в точке встречи заданные углы встречи с целью.
Функциональная схема системы наведения, реализующий способ наведения телеуправляемой ракеты, приведена на чертеже, где обозначено:
ПЦ - пеленгатор цели;
БФУ - блок формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ;
ПР - пеленгатор ракеты;
БФР - блок формирования углового рассогласования между координатами ракеты и ЛВЦ;
CM - сумматор;
БФК - блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ с учетом углового смещения кинематической траектории наведения ракеты относительно ЛВЦ;
УПК - устройство передачи команд управления;
Р - ракета;
ППК - первый преобразователь координат;
ВПК - второй преобразователь координат;
ДСУ - дифференцирующе-сглаживающее устройство;
БПР - блок прогнозирования;
БГУ - блок формирования граничных условий;
БФТ - блок формирования модели траектории сопряжения.
Система наведения телеуправляемой ракеты состоит из пеленгатора цели 1 и контура управления ракетой, включающего в каждом канале управления тангажа и курса блок формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ 2 последовательно соединенные пеленгатор ракеты 3, блок формирования углового рассогласования между ракетой и ЛВЦ 4, второй вход которого подключен к соответствующему выходу пеленгатора цели 1, сумматор 5, второй вход которого подключен к выходу блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ 2, блок формирования команды управления, пропорциональной угловому рассогласованию между ракетой и ЛВЦ с учетом углового смещения кинематической траектории ракеты относительно ЛВЦ 6, устройство передачи команды управления на ракету 7 и ракету 8, а также первый преобразователь координат 9, первый, второй и третий входы которого соответственно подключены к первому, второму и третьему выходу пеленгатора цели, второй преобразователь координат 10, первый, второй и третий входы которого соответственно подключены к первому, второму и третьему выходам пеленгатора ракеты, и последовательно соединенные дифференцирующе-сглаживающее устройство 11, первый, второй и третий входы которого подключены соответственно к первому, второму и третьему выходам первого преобразователя координат 9, а четвертый, пятый и шестой входы - подключены соответственно к первому, второму и третьему выходам второго преобразователя координат 10, блок прогнозирования 12, восемнадцать входов которого соответственно подключены к восемнадцати выходам дифференцирующе-сглаживающего устройства 11, блок формирования граничных условий 13, тринадцать входов которого подключены соответственно к тринадцати выходам блока прогнозирования 12, блок формирования модели траектории сопряжения координат ракеты и цели 14, двенадцать входов которого подключены соответственно к двенадцати выходам блока формирования граничных условий 13, первый, второй и третий выходы блока формирования модели траектории сопряжения координат ракеты и цели 14 подключены соответственно к первому, второму и третьему входам блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ2.
Составляющие элементы системы - пеленгатор цели 1, пеленгатор ракеты 3, устройство передачи команд управления 7 представляют собой известные штатные элементы системы наведения ракет ([5], стр.335).
Блок формирования команды управления, пропорциональной угловому рассогласованию между координатами ракеты и ЛВЦ 6, также является известным устройством системы наведения телеуправляемой ракеты и может быть выполнен на аналоговых счетно-решающих элементах ([1], стр.371).
Элементы - дифференцирующие-сглаживающие устройство 11, сумматор 5, блок формирования углового рассогласования между координатами ракеты и ЛВЦ 4, первый и второй преобразователи координат 9 и 10, блок прогнозирования 12, блок формирования граничных условий 13, блок формирования модели траектории сопряжения 14 и блок формирования углового смещения кинематической траектории наведения относительно ЛВЦ 2, могут быть выполнены, например, в виде решающих схем на базе операционных усилителей ([6], стр.42, 43, 72, 125, 144, 190).
Система наведения ракетой работает следующим образом (рассмотрим работу одного канала наведения). Пеленгатор цели 1 осуществляет ее сопровождение и измерения сферических координат εц, βц, Dц, пеленгатор ракеты 3 осуществляет сопровождение ракеты и измерение сферических координат ракеты εр, βP, DP. Измеренные угловые координаты поступают соответственно на первый и второй входы блока формирования углового рассогласования между координатами ракеты и ЛВЦ 4, где формируется угловое рассогласование между координатами ракеты и ЛВЦ.
Сформированное угловое рассогласование между координатами ракеты и ЛВЦ с выхода блока 4 поступает на первый вход сумматора 5, где суммируется с углом смещения кинематической траектории наведения ракеты ΔεK, поступающим на его второй вход соответственно с выхода блока формирования углового смещения кинематической траектории наведения ракеты 2, далее суммарный сигнал с выхода сумматора 5 поступает на вход блока формирования команды управления 6, где формируется команда управления, пропорциональная угловому рассогласованию между координатами ракеты и ЛВЦ с учетом углового смещения кинематической траектории ракеты относительно ЛВЦ.
Сформированная команда управления с помощью устройства передачи команды управления 7 передаются на ракету 8. Ракета 8 под действием команды управления осуществляет движение относительно ЛВЦ до встречи с целью.
Угловое смещение кинематической траектории наведения ракеты относительно ЛВЦ ΔεK формируется следующим образом. Измеренные координаты цели εц, βЦ, DЦ с пеленгатора цели 1 поступают соответственно на первый, второй и третий входы первого преобразователя координат 9, измеренные координаты ракеты εР, βp, Dp с пеленгатора ракеты 3 поступают соответственно на первый, второй и третий входы второго преобразователя координат 10, в преобразователях координат 9 и 10 осуществляется преобразование сферических координат ракеты и цели в прямоугольные координаты. Прямоугольные координаты цели с первого, второго и третьего выходов первого преобразователя координат 9 соответственно поступают на первый, второй и третий входы дифференцирующе-сглаживающего устройства 11, а преобразованные координаты ракеты с первого, второго и третьего выходов второго преобразователя координат 10 соответственно поступают на четвертый, пятый и шестой входы дифференцирующе-сглаживающего устройства 11, в котором производится дифференцирование и сглаживание прямоугольных координат ракеты и цели. Далее сглаженные координаты цели и ракеты и их производные поступают соответственно на восемнадцать входов блока прогнозирования 12, в котором прогнозируются координаты точки встречи ракеты с целью и время, оставшееся до встречи ракеты с целью. Соответственно с тринадцати выходов блока прогнозирования 12 поступают текущие координаты ракеты, скорости изменения координат ракеты, координаты прогнозируемой точки встречи, требуемые скорости изменения координат ракеты в момент встречи с целью и время, оставшееся до встречи ракеты с целью, на соответствующие тринадцать входов блока формирования граничных условий 13, в котором формируются граничные условия для модели траектории сопряжения координат ракеты и цели и определяются параметры траектории сопряжения. Соответственно с двенадцати выходов блока 13 определенные параметры траектории сопряжения поступают соответственно на двенадцать входов блока формирования модели траектории сопряжения координат ракеты и цели 14, где определяются текущие координаты траектории сопряжения координат ракеты и цели. С первого, второго и третьего выходов блока 14 координаты траектории сопряжения координат ракеты и цели поступают на первый, второй и третий входы блока формирования углового смещения кинематической траектории наведения ракеты относительно ЛВЦ 2, в котором определяется необходимое угловое смещение кинематической траектории наведения ракеты относительно ЛВЦ.
Таким образом, решение поставленной задачи в предлагаемом способе наведения телеуправляемой ракеты и системе наведения для его реализации позволяет обеспечить требуемые углы встречи ракеты с целью, в том числе и нулевые.
Предлагаемые способ наведения телеуправляемой ракеты и система наведения для его реализации позволяют повысить эффективность поражения подвижных целей, особенно высокоскоростных, летящих на больших высотах или с большими курсовыми параметрами, и тем самым повысить эффективность комплексов вооружения телеуправляемых ракет, что выгодно отличает их от известных.
Источники информации
1. А.А.Лебедев, В.А.Карабанов. Динамика систем управления беспилотными летательными аппаратами. - М.: Машиностроение, 1965.
2. Ф.К.Неупокоев. Стрельба зенитными ракетами. - М.: Воениздат, 1980.
3. Г.Корн, Т.Корн. Справочник по математике для научных работников и инженеров. - М.: Наука, 1968.
4. Под ред. В.Н.Беляева, А.З.Рывкин. Справочник по высшей математике. - М.: Физматгиз, 1963.
5. Под ред. В.В.Григорина-Рябова. Радиолокационные устройства. - М.: Советское радио, 1970.
6. И.М.Тетельбаум, Ю.Р.Шнейдер. Практика аналогового моделирования динамических систем. - М.: Энергоатомиздат, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ РАКЕТЫ | 2009 |
|
RU2426969C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2002 |
|
RU2234041C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2192605C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2106597C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2011 |
|
RU2466345C1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2016 |
|
RU2645850C1 |
| СИСТЕМА НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2000 |
|
RU2191345C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 1997 |
|
RU2122700C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ | 2001 |
|
RU2205360C2 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ | 2010 |
|
RU2437052C1 |
Изобретение относится к ракетной технике и может быть использовано в комплексах вооружения телеуправляемых ракет. Технический результат - обеспечение требуемых углов встречи ракеты с целью. Согласно изобретению измеряют координаты цели и ракеты, формируют в вертикальной и наклонной плоскостях наведения угловое смещение кинематической траектории наведения ракеты относительно линии визирования цели. Формируют команды управления ракетой, пропорциональной угловому рассогласованию между координатами ракеты и линии визирования цели с учетом углового смещения кинематической траектории наведения ракеты, и передают команды управления на ракету. Новым в способе наведения является то, что формируют для каждой плоскости движения ракеты модель траектории сопряжения координат ракеты и цели в виде полиномов соответствующих координат ракеты в функции времени, оставшегося до встречи ракеты с целью. В текущем времени прогнозируют координаты точки встречи ракеты с целью и время, оставшееся до их встречи, формируют для каждой плоскости движения в соответствии с текущими измеренными координатами ракеты, координатами прогнозируемой точки встречи и значениями требуемых углов встречи ракеты с целью граничные условия для модели траектории сопряжения координат ракеты и цели. Определяют с учетом сформированных граничных условий параметры модели траектории сопряжения координат ракеты и цели, преобразуют координаты траектории сопряжения координат ракеты и цели, полученные с помощью модели, в координаты углового смещения кинематической траектории наведения ракеты относительно линии визирования цели в каждой плоскости наведения. Далее наведение ракеты проводят с учетом полученного углового смещения кинематической траектории наведения ракеты относительно линии визирования цели. 2 н.п. ф-лы, 1 ил.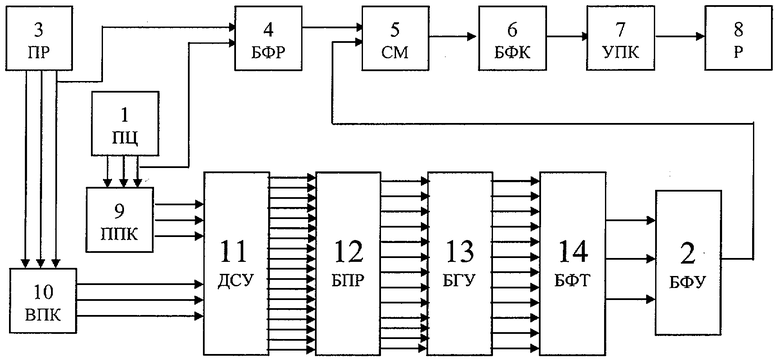
| ЛЕБЕДЕВ А.А., КАРАБАНОВ В.А | |||
| Динамика систем управления беспилотными летательными аппаратами | |||
| М.: Машиностроение, 1965, с.30, 325-330, 339-342, 379-381 | |||
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| СИСТЕМА УПРАВЛЕНИЯ РАКЕТОЙ САМОХОДНОГО ЗЕНИТНОГО КОМПЛЕКСА | 1995 |
|
RU2102686C1 |
| US 5197691 A, 30.03.1993 | |||
| DE 3034838 C1, 29.11.1990. | |||

