Предлагаемый способ управления может быть использован в космической технике при уводе пилотируемого космического аппарата (ПКА) от неориентированного в пространстве космического объекта (КО), находящегося на околокруговой орбите искусственного спутника Земли, например, орбитальной станции "Мир", международной космической станции, на котором произошла авария и возникла необходимость срочного покидания его.
Известен способ управления, выбранный в качестве аналога, в котором для обеспечения несоударения ПКА и КО после их расстыковки связка КО+ПКА до расстыковки ориентируется в орбитальной системе координат таким образом, что пружинами толкателей стыковочного механизма ПКА отталкивается от КО с увеличением орбитальной скорости. Через несколько минут после расстыковки на ПКА включаются двигатели для дополнительного увеличения орбитальной скорости ПКА. В результате ПКА переводится на более высокую орбиту и отстает от КО. Такой способ обеспечения безопасности автономного полета КО и ПКА [1], применяемый при отстыковке пилотируемых кораблей "Союз ТМ" (ПКА) и грузовых кораблей "Прогресс М" от орбитальной станции "Мир" (КО), требует выполнения предварительной ориентации КО в орбитальной системе координат до отстыковки ПКА.
Известен способ управления уводом ПКА от КО, выбранный в качестве прототипа, который предусмотрен при отстыковке от неориентированного КО. Этот способ разработан для применения на станции "Мир", к которой пристыкован "Шаттл" [2]. После отстыковки ПКА от КО на ПКА выдается корректирующий импульс для увеличения скорости отхода ПКА. Поскольку предварительная ориентация КО произвольна, то произвольна траектория ПКА и нет гарантии безопасности автономного полета КО и ПКА. Поэтому после расстыковки экипаж КО сообщает на ПКА информацию об ориентации связки КО+ПКА в момент расстыковки, экипаж ПКА после выдачи корректирующего импульса ориентирует ПКА в орбитальной системе координат, в соответствии с информацией об ориентации связки выдает корректирующий импульс на выход из плоскости орбиты в направлении от КО, а затем корректирующий импульс на увеличение орбитальной скорости.
Основным недостатком такого способа обеспечения безопасности при уводе ПКА от КО является то, что экипаж ПКА не может самостоятельно управлять процессом без информации с КО об ориентации связки на момент расстыковки, которая определяет направление отхода и последующее движение ПКА относительно КО.
Техническим результатом изобретения является обеспечение полной автономности увода ПКА от неориентированного КО при отсутствии информации от внешнего источника о взаимном положении КО и ПКА в орбитальной системе координат (ОСК) и гарантии безопасного удаления ПКА от КО в течение нескольких витков после расстыковки и при выдаче тормозного импульса перед спуском с орбиты.
Технический результат достигается благодаря тому, что в способ управления ПКА, отстыкованным от находящегося на околокруговой орбите неориентированного КО, включающий выдачу импульса отвода после отделения от КО, ориентацию ПКА для совмещения его продольной оси с вектором орбитальной скорости и выдачу корректирующего импульса, введено, что после построения ориентации ПКА производят наблюдение КО через устройства визуального наблюдения, суммарное непрерывное поле зрения которых в плоскости, проходящей через продольную ось ПКА, составляет не менее 90o, и одна из его границ совпадает с продольной осью ПКА, а в перпендикулярной плоскости - не менее 5o, при отсутствии изображения КО выполняют закрутку ПКА вокруг его продольной оси для обзора внешнего пространства до момента обнаружения КО, при этом, если при обнаружении КО угол между направлением на КО и вектором орбитальной скорости составляет меньше 90o, то корректирующий импульс выдают против орбитальной скорости, если этот угол больше 90o, то корректирующий импульс выдают по направлению орбитальной скорости.
Фиг. 1 иллюстрирует принцип определения положения КО относительно ПКА в зависимости от угла между линией визирования КО и вектором орбитальной скорости. Принятые обозначения: ЛВ - линия визирования КО с ПКА, YОСК и ХОСК - оси орбитальной системы координат (ОСК) с центром в КО, VОРБ - вектор орбитальной скорости, ϕ- угол между линией визирования КО и вектором орбитальной скорости.
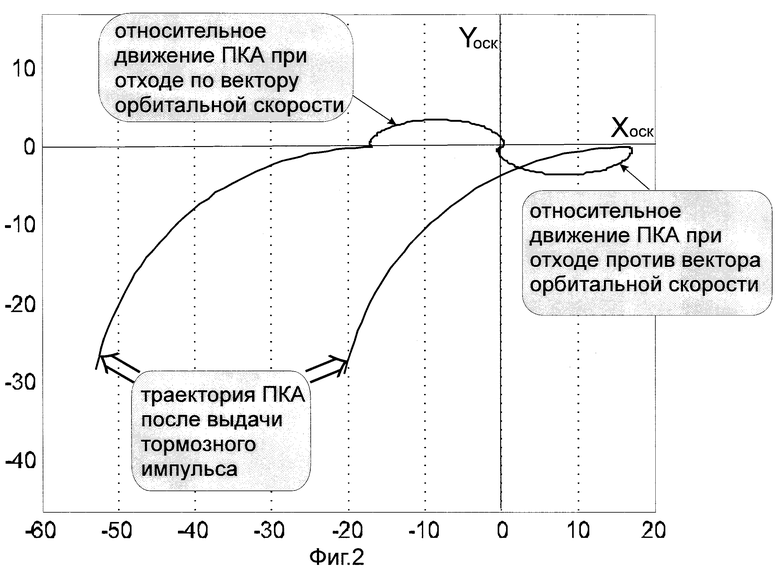
На фиг.2 представлены две траектории относительного движения ПКА в плоскости XoY ОСК КО. Первая траектория соответствует отходу со скоростью 1 м/с против вектора орбитальной скорости и последующей выдаче через виток тормозного спускового импульса величиной 90 м/с. Вторая траектория соответствует отходу со скоростью 1 м/с по вектору орбитальной скорости и последующей выдаче через виток тормозного спускового импульса величиной 90 м/с. Как видно из фиг. 2, в случае первой траектории для обеспечения безопасности к началу отработки спускового импульса должно быть обеспечено достаточное фазовое удаление ПКА от КО.
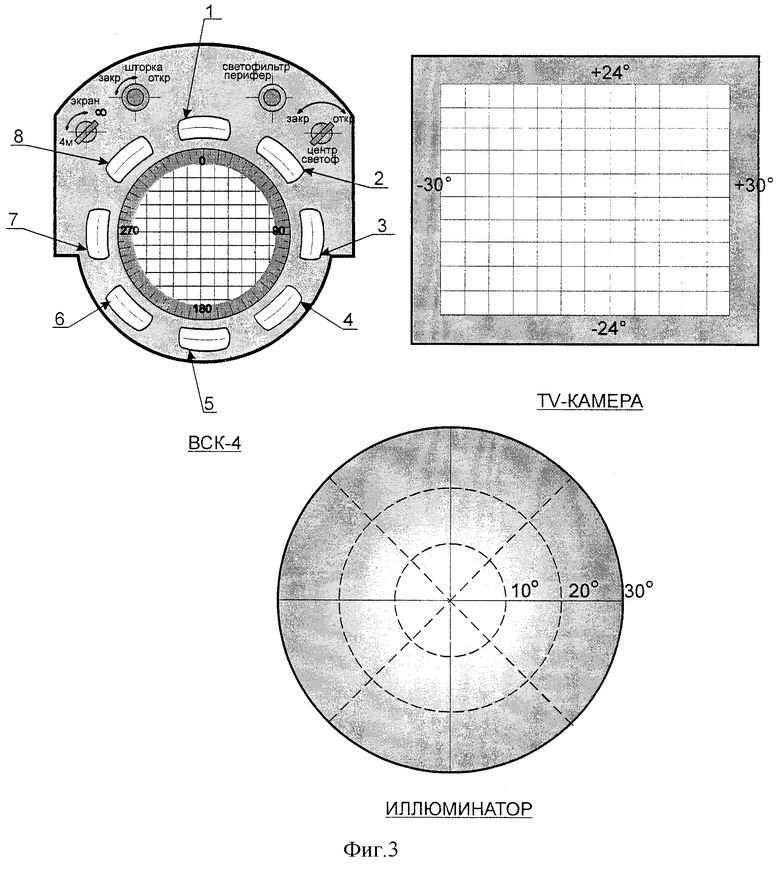
На фиг.3 показаны устройства визуального наблюдения ПКА "Союз-ТМ", используемые при реализации предлагаемого способа управления. Оптический прибор ВСК-4 имеет в своем составе периферийные трубки (с полем зрения не менее 13х28o), визирные оси которых наклонены на 72,5o к оси прибора, направленной по оси -YКА, 1-8 - номера периферийных трубок. Внешняя телекамера имеет поле зрения 48х60o с осью визирования, направленной по оси -ХКА. Иллюминатор с полем зрения ±30o направлен по оси -ZКА.
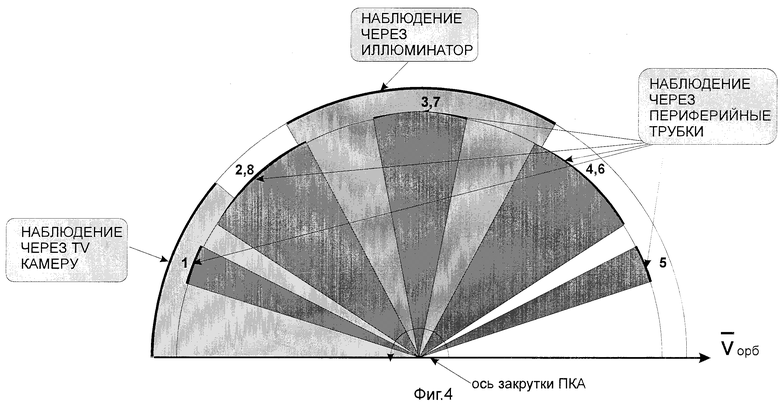
На фиг. 4 изображено сечение полуплоскостью, ограниченной осью закрутки ПКА, областей внешнего пространства, сканируемых полями зрения устройств визуального наблюдения ПКА, представленных на фиг.3:
- 1-8 номера периферийных трубок ВСК-4;
- VОРБ - вектор орбитальной скорости;
- ϕ - угол между линией визирования КО и вектором орбитальной скорости, определяющий положение КО относительно ПКА.
Из фиг.4 видно, что полусфера внешнего пространства с ϕ > 90o полностью перекрывается при закрутке полями зрения периферийных трубок ВСК-4, внешней телекамеры и иллюминатора ПКА "Союз-ТМ". Для определения направления выдачи корректирующего импульса достаточно знания полусферы, в которой находится КО относительно ПКА [3].
Технический результат в предлагаемом способе управления достигается тем, что выдачу корректирующего импульса для увода ПКА производят по или против вектора орбитальной скорости после того, как определено с точностью до полусферы положение КО относительно ПКА в орбитальной системе координат устройствами визуального наблюдения. Для этого после выдачи импульса отвода ПКА ориентируется в орбитальной системе координат для совмещения продольной оси ПКА с вектором орбитальной скорости. Если после построения ориентации в полях зрения устройств визуального наблюдения КО не виден, то выполняют закрутку ПКА вокруг продольной оси, для того, чтобы обеспечить обнаружение КО. После обнаружения КО корректирующий импульс выдают в направлении, определяемом величиной угла между линией визирования КО и вектором орбитальной скорости (см. фиг.1). Причем, исходя из законов орбитального движения [3], для получения желаемого результата достаточно определять только полусферу, в которой находится ПКА (впереди по полету или сзади) по отношению к КО. Иными словами, необходимо определять только координату Х (точнее ее знак), определяющую положение ПКА относительно КО в орбитальной системе координат. Знаки и величины других координат (У и Z) не влияют на определение направления выдачи корректрующего импульса. Изменение величины орбитальной скорости, по направлению которой ориентирована продольная ось ПКА, приводит к изменению периода вращения ИС3 и, следовательно, через 1 виток после расстыковки КО и ПКА в разное время достигнут точки в пространстве, в которой произошла расстыковка. Именно это обстоятельство и используется для обеспечения несоударения КО и ПКА в автономном полете.
Величина корректирующего импульса для обоих направлений одинаковая и выбирается из условия обеспечения гарантированного расстояния между ПКА и КО через один виток и при выдаче тормозного импульса для схода ПКА с орбиты искусственного спутника. На величину корректирующего импульса влияют скорость вращения КО при расстыковки, величины импульса толкателей стыковочного механизма и отвода, зависящего от угловой скорости вращения КО, выноса центра масс ПКА от центра масс КО до отстыковки ПКА и конфигурации КО, а также погрешности построения ориентации и исполнения импульсов.
При выдаче корректирующего импульса по вектору орбитальной скорости ПКА переходит на более высокую орбиту и отстает от КО. При импульсе против орбитальной скорости ПКА переходит на более низкую орбиту и опережает его. В обоих случаях из-за изменения периода орбиты через виток (примерно через 90 мин полета) между КО и ПКА в зависимости от величины корректирующего импульса будет несколько километров [3]. Поэтому дальнейший полет будет безопасен, в том числе и при выдаче тормозного импульса на ПКА перед спуском.
Предлагаемый способ управления может быть реализован известными системами управления.
Построение орбитальной ориентации может быть выполнено автоматической системой с использованием датчика инфракрасной вертикали так, как это выполняется на корабле "Союз ТМ".
Наблюдение внешнего пространства может быть произведено также, как это выполняется на корабле "Союз ТМ" - через телевизионную камеру, ось визирования которой параллельна продольной оси корабля, оптический прибор ВСК 4, ось визирования которого перпендикулярна продольной оси корабля, а также через иллюминаторы, оси визирования которых перпендикулярны продольной оси корабля. Совокупность этих приборов при закрутке корабля вокруг продольной оси обеспечивает обзор пространства в конусе, полураствор которого больше 90o, а ось - совпадает с направлением продольной оси корабля (фиг.3, 4).
Закрутка ПКА для осмотра внешнего пространства может быть выполнена так же, как это делается на корабле "Союз ТМ" - с помощью системы ручного управления ориентацией.
Выдача корректирующего импульса может быть реализована также с помощью системы ручного управления причаливанием, которая обеспечивает коррекцию движения центра масс корабля "Союз ТМ" в любом направлении, что является необходимым условием при выполнении ручной стыковки.
Статистическое моделирование (100000 реализаций) расстыковки ПКА ("Союз ТМ") от КО (МКС), выдачи импульса отвода, построения орбитальной системы координат с учетом случайных ошибок построения ориентации, поиска КО, выдачи корректирующего импульсов на ПКА и тормозного импульса для спуска с орбиты ИСЗ с учетом ошибок исполнения импульсов показывает, что во всех реализациях обеспечивается обнаружение КО за 1 оборот ПКА при угловой скорости закрутки не менее 2 град/с, а величина корректирующего импульса может быть определена по следующей эмпирической зависимости
ΔVк≥1.2+ΔVд+ΔVт,
где ΔVк - корректирующий импульс,
ΔVд - импульс отвода, выдаваемый сразу после расстыковки в произвольной ориентации ПКА,
ΔVт - импульс толкателей стыковочного механизма,
1,2 - постоянная составляющая [м/с].
Импульс отвода ΔVд обеспечивает безопасный отход от КО в непосредственной близости от КО сразу после расстыковки. Его величина зависит от скорости вращения КО, конкретного места на конструкции, к которому пристыкован ПКА, и геометрии КО. Наличие в составе КО различных модулей и солнечных батарей затрудняет безопасный отход ПКА от КО, особенно при вращении КО до расстыковки. Величина импульса отвода устанавливается при моделировании для наихудших условий в момент разделения и для международной космической станции составляет 1,0-1,4 м/с.
Импульс толкателей стыковочного механизма ΔVт имеет конечное значение и для ПКА ("Союз-ТМ") составляет 0,10-0,12 м/с.
Постоянная составляющая импульса - 1,2 м/с выбрана из условия гарантированного пролета ПКА на расстоянии 12 км от КО через один виток [3].
При моделировании для расчета величины корректирующего импульса ΔVд (для "ПКА "Союз ТМ") было принято, что ПКА находится впереди КО по полету (по вектору орбитальной скорости), а в момент расстыковки КО вращается со скоростью 2 град/с. В таких условиях величина корректирующего импульса ΔVк должна быть не менее 2,7 м/с. При этом гарантируется, что через один виток полета после расстыковки расстояние между ПКА и КО будет не менее 12 км. Случай положения ПКА сзади КО по полету требует меньшей величины корректирующего импульса.
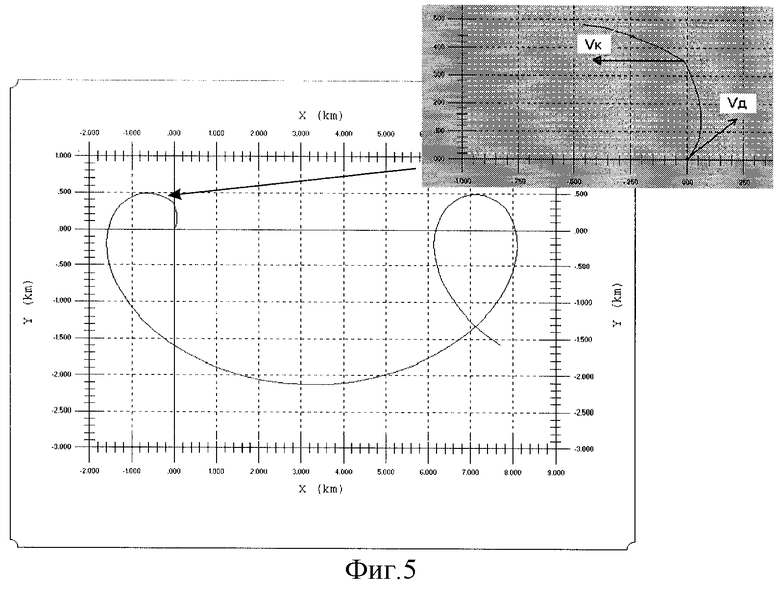
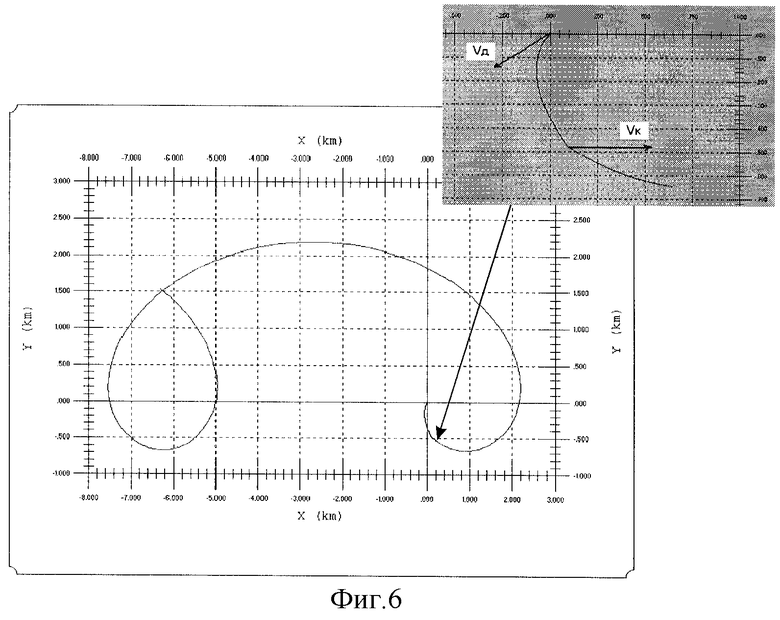
На фиг.5 и 6 представлены графики относительного движения ПКА в плоскости ХоУ ОСК КО. На фиг.5 показана траектория полета ПКА при выдаче тормозного импульса, а на фиг.6 - при выдаче разгонного импульса.
Список литературы
1. Ж. Новости космонавтики, т. 9, 4 (195), 1999 г., стр. 22, Москва.
2. Joint Flight Rules (STS - 76) - Правила совместного полета (СТС - 76), РГ-3/РКК Э/НАСА/004/3242-3, 14 февраля 1996 г.
3. Основы теории полета космических аппаратов, Машиностроение, Москва, 1972 г.
4. US patent 05493392, 20 feb. 1996, Blackman J, Digital image system for determining relative position and motion of in-flight vehicles.
5. US patent 05207003, 4 may 1993, Yamada N, Target and system for three-dimensionally measuring position and attitude using said target.
6. US patent 05119305, 2 June 1992, Ferro D, Process and system for remotely controlling an assembly of a first and a second object.
7. US patent 05302816, 12 apr 1994, Tulet M, Optical device for determining the relative position of two vehicles, and an alignment system comprising an application thereof.
Изобретение относится к космической технике и может быть использовано на космическом объекте (КО) при возникновении необходимости срочного его покидания. Способ включает выдачу импульса отвода после отделения от КО, ориентацию пилотируемого космического аппарата (ПКА) для совмещения его продольной оси с вектором орбитальной скорости и выдачу корректирующего импульса. Дополнительно производят обнаружение КО через устройства визуального наблюдения. Поле зрения устройств наблюдения в плоскости, проходящей через продольную ось ПКА, составляет не менее 90o и одна из его границ совпадает с его продольной осью, а в перпендикулярной плоскости - не менее 5o. При необнаружении КО производят закрутку ПКА вокруг его продольной оси до обнаружения КО и выдачу корректирующего импульса для обеспечения безопасного автономного полета КО и ПКА после отстыковки ПКА в течение нескольких витков, а также во время выдачи тормозного импульса перед посадкой на Землю. Направление выдачи корректирующего импульса определяется по величине угла визирования на КО относительно направления вектора орбитальной скорости. Если указанный угол меньше 90o, то корректирующий импульс выдают против направления вектора орбитальной скорости, а если этот угол больше 90o, то корректирующий импульс выдают по направлению вектора орбитальной скорости. Изобретение обеспечивает автономность и безопасность увода ПКА от КО. 6 ил.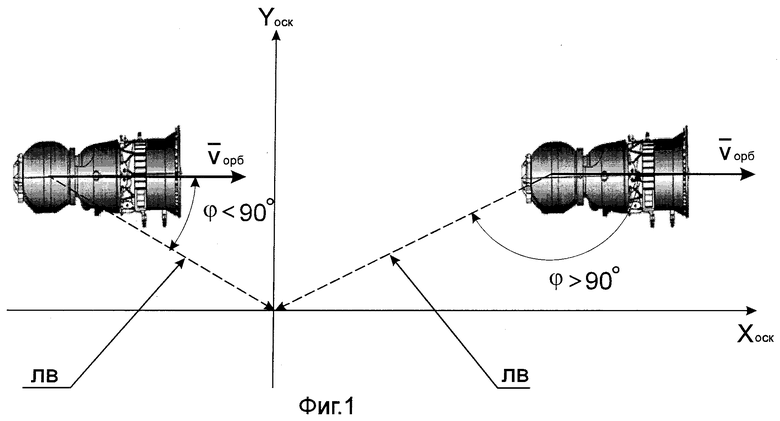
Способ управления пилотируемым космическим аппаратом, отстыкованным от находящегося на околокруговой орбите неориентированного космического объекта, включающий выдачу импульса отвода после отделения от космического объекта, ориентацию пилотируемого космического аппарата для совмещения его продольной оси с вектором орбитальной скорости и выдачу корректирующего импульса, отличающийся тем, что после построения ориентации пилотируемого космического аппарата производят наблюдение космического объекта через устройства визуального наблюдения, суммарное непрерывное поле зрения которых в плоскости, проходящей через продольную ось пилотируемого космического аппарата, составляет не менее 90o и одна из его границ совпадает с продольной осью пилотируемого космического аппарата, а в перпендикулярной плоскости - не менее 5o, причем при отсутствии изображения космического объекта выполняют закрутку пилотируемого космического аппарата вокруг его продольной оси для обзора внешнего пространства до момента обнаружения космического объекта, при этом если при обнаружении космического объекта угол между направлением на космический объект и вектором орбитальной скорости составляет меньше 90o, то корректирующий импульс выдают против направления вектора орбитальной скорости, а если этот угол больше 90o, то корректирующий импульс выдают по направлению вектора орбитальной скорости.
| Аппарат, предназначенный для летания | 0 |
|
SU76A1 |
| US 5493392 А, 20.02.1996 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| БАННАЯ ПЕЧЬ | 2017 |
|
RU2651878C1 |
| СПОСОБ ЗАКАЧКИ В СКВАЖИНУ ВОДНОГО ФЛЮИДА, СОДЕРЖАЩЕГО ОБРАБАТЫВАЮЩИЙ АГЕНТ ДЛЯ МОДИФИКАЦИИ ПОВЕРХНОСТИ | 2016 |
|
RU2672690C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ С ПОМОЩЬЮ РЕАКТИВНЫХ ИСПОЛНИТЕЛЬНЫХ ОРГАНОВ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1997 |
|
RU2112716C1 |
| СПОСОБ УПРАВЛЕНИЯ КОСМИЧЕСКИМ АППАРАТОМ, СНАБЖЕННЫМ РЕАКТИВНЫМИ ДВИГАТЕЛЯМИ С НАПРАВЛЕННЫМИ ПОД УГЛОМ К ОСЯМ СВЯЗАННОГО БАЗИСА И СМЕЩЕННЫМИ ОТНОСИТЕЛЬНО ЦЕНТРА МАСС АППАРАТА ЛИНИЯМИ ДЕЙСТВИЯ ТЯГ, СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА, БЛОК РЕАКТИВНЫХ ДВИГАТЕЛЕЙ СИСТЕМЫ | 1997 |
|
RU2124461C1 |

