Изобретение относится к космической технике и может быть использовано в системах управления ориентацией космических аппаратов (КА), снабженных бортовым радиотехническим комплексом для коррекции ориентации КА.
Известны различные способы управления ориентацией космического аппарата [см. /1/ стр. 39-58, /2/ стр. 79-92]. В качестве одного из небесных ориентиров при космических полетах используется Солнце как источник мощнейшего излучения практически во всем диапазоне длин волн. Разработана методика восстановления ориентации КА в случае визирования Солнца и звезды. После поиска Солнца и требуемой звезды, зная координаты Солнца и звезды в поле зрения солнечного и звездного датчиков, а следовательно, и в связанной с КА системе координат, координаты астроориентиров в абсолютной системе координат и расчетную ориентацию КА, определяют отклонение текущей ориентации КА от расчетной. Производят коррекцию ориентации КА. К недостаткам такого способа относится необходимость поиска астроориентиров, большие угловые размеры Солнца, приводящие к ухудшению точности определения текущей ориентации, невозможность реализации при нахождении КА в тени планеты.
Известен способ управления ориентацией КА, наиболее близкий из аналогов, включающий определение, построение и поддержание исходной ориентации космического аппарата, измерение исходных и текущих параметров источников сигнала, в качестве которых используются звезды, определение по текущим и исходным параметрам источников сигнала (координатам звезд в абсолютной и связанной с КА системах координат) текущей ориентации космического аппарата, и коррекцию ориентации космического аппарата путем его разворота из текущей ориентации в исходную с помощью исполнительных органов КА, например гиродинов. Наиболее распространено управление ориентацией КА, при котором определение текущей ориентации осуществляется по двум или более звездам. Объясняется такая популярность этого способа тем, что, во-первых, при движении аппарата около Земли направление на звезды относительно абсолютной системы координат можно считать неизменным, а во-вторых, угловые размеры звезд малы и, следовательно, их можно не учитывать при расчете углов ориентации линии визирования. Схема определения ориентации КА аналогична той, что используется при определении ориентации по Солнцу и звезде. После отождествления наблюдаемых звездным датчиком звезд, зная их координаты в поле зрения звездного датчика, а следовательно, и в связанной с КА системе координат, координаты наблюдаемых датчиком звезд в абсолютной системе координат и расчетную ориентацию КА, определяют отклонение текущей ориентации КА от расчетной. Обычно получаемая на КА информация о звездах с помощью бортового радиотехнического комплекса (БРК) передается в центр управления полетом и там используется для определения текущей ориентации КА так, как указывалось ранее.
К недостаткам такого способа относится возможность засветки звездного датчика при движении по освещенной Солнцем части орбиты, что приводит к невозможности его использования.
Задачей предлагаемого способа является управление ориентацией КА, снабженного бортовым радиотехническим комплексом, в условиях, когда использование способа управления ориентацией, описанного в прототипе, затруднено, а именно для обеспечения управления ориентацией КА при движении его по освещенной Солнцем части орбиты.
Для этого в способе управления ориентацией космического аппарата, снабженного бортовым радиотехническим комплексом, включающим определение, построение и поддержание исходной ориентации космического аппарата, измерение исходных и текущих параметров источников сигнала, определение по текущим и исходным параметрам источников сигнала текущей ориентации космического аппарата, коррекцию ориентации космического аппарата, в отличие от известного способа строят и поддерживают такую исходную ориентацию космического аппарата, при которой ось антенны БРК направлена в заданную точку визирования на поверхности планеты, измеряют исходный сигнал на выбранных измерительных станциях (ИС), находящихся в области видимости космического аппарата, определяют закон изменения сигнала от БРК на ИС при измерении указанного исходного сигнала в процессе изменения ориентации КА, обеспечивающего приращение исходного сигнала на ИС, имеющее разные знаки и амплитуду, строят и поддерживают заданную ориентацию космического аппарата, параметры которой совпадают с параметрами исходной ориентации, измеряют текущий сигнал на измерительных станциях и в случае его отклонения от исходного рассчитывают по определенному закону изменения сигнала на измерительных станциях положение оси антенны бортового радиотехнического комплекса космического аппарата, по измеренному и рассчитанному положению оси антенны бортового радиотехнического комплекса космического аппарата определяют текущую ориентацию космического аппарата и проводят коррекцию его ориентации.
Весь процесс управления ориентацией можно разделить на три этапа. На первом этапе необходимо получить т.н. исходный сигнал на измерительных станциях (ИС), т.е. сигнал, с которым можно будет сравнивать получаемый в процессе коррекции ориентации КА текущий сигнал. На втором этапе по полученным на ИС измерениям сигнала и исходному сигналу производится определение текущего положения антенны КА и определяется текущая ориентация КА. И, наконец, на третьем этапе производится коррекция ориентации КА.
Для получения исходного сигнала на ИС требуется провести несколько операций. Во-первых, необходимо определиться с источником сигнала на КА. Этот сигнал должен быть стабильным, достаточной мощности, чтобы минимизировать влияние на него шумов, помех, метеоров и т.д. В качестве эталонной величины может выступать амплитуда сигнала, соотношение "сигнал-шум" или другие параметры сигнала. В качестве источника сигнала может выступать, например, штатный радиопередатчик, удовлетворяющий перечисленным выше условиям, или радиомаяк. Во-вторых, необходимо построить, например, с помощью маховиков и датчиков угловой скорости и затем поддерживать такую исходную ориентацию КА, при которой ось антенны направлена в заданную точку на поверхности планеты. Далее в построенной ориентации измеряется сигнал на ИС. Лучше провести несколько разнесенных по времени сеансов измерений, чтобы избежать влияния на сигнал случайных факторов (например, метеоров), и по полученной информации, проведя статистическую обработку измерений, получим сигнал, который в дальнейшем будем использовать в качестве исходного.
Для проведения последующих расчетов необходимо определиться с законом изменения сигнала на ИС при изменении ориентации КА. Для этого проводят т.н. "прокачку" КА, т.е. проведение измерений сигнала на ИС при таком отклонении ориентации КА от исходной ориентации, при котором приращение сигнала имеет разные знаки и амплитуду. Используя полученную на ИС информацию, строится закон изменения сигнала на каждой ИС. Например, можно, исходя из конкретных условий, сформировать закон изменения сигнала на ИС от углового расстояния или от линейного расстояния до точки визирования антенны КА. Закон изменения сигнала необходим для получения возможной области визирования антенны КА на поверхности планеты.
На втором этапе проведения коррекции ориентации КА строится и затем поддерживается на всем интервале измерений такая ориентация КА, в которой был получен исходный сигнал и которая служила в качестве исходной при формировании закона изменения сигнала. На ИС, координаты которых известны с высокой точностью, проводятся измерения текущего сигнала. По полученному таким образом значению текущего сигнала, исходному сигналу, используя сформированный закон изменения сигнала на каждой ИС, определим область визирования и затем текущее направление визирования оси антенны.
Зная текущее направление визирования оси антенны на поверхности планеты, определим текущую ориентацию КА, которую используем для коррекции ориентации КА посредством восстановления ориентации или внесением поправок в информацию об угловом положении КА.
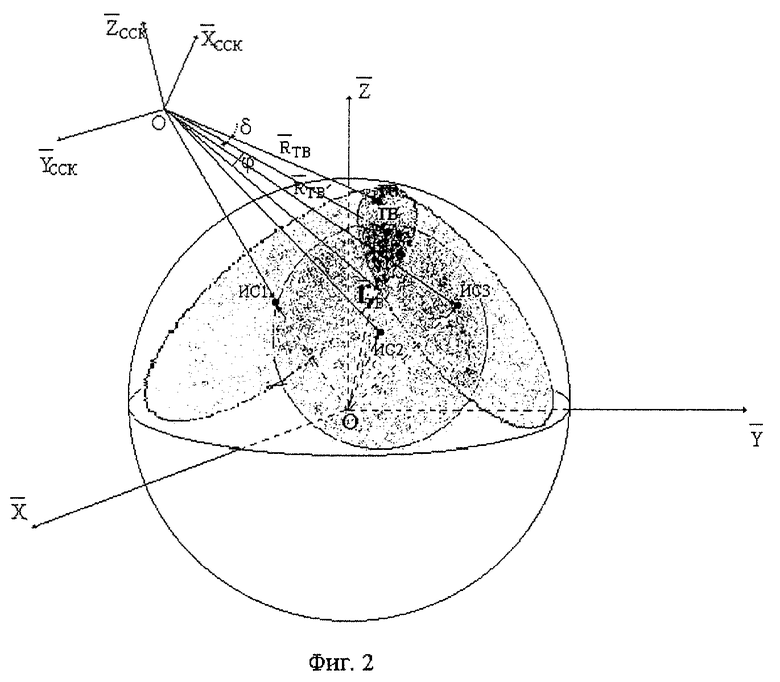
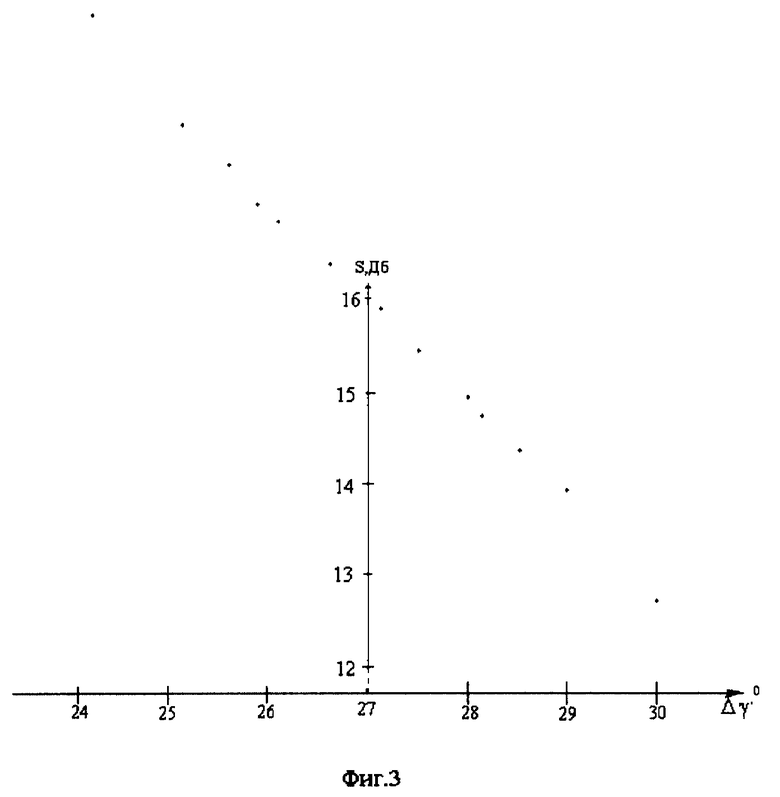
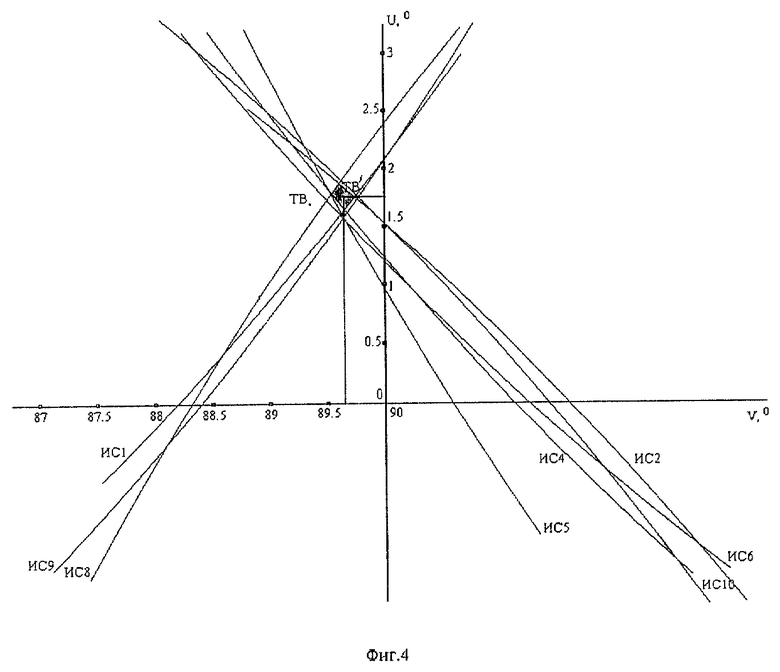
Далее перечисленные этапы управления ориентацией КА описаны более подробно и поясняются фиг.1-4, где на фиг.1 приведены используемые системы координат и параметры, характеризующие положение ИС и КА в этих системах координат; на фиг. 2 показаны возможные области визирования антенны КА, результирующая область и точка визирования антенны КА; на фиг.3 изображен график изменения сигнала от антенны КА на ИС при изменении ориентации КА; на фиг.4 показана область и точка визирования антенны КА, полученная в процессе решения задачи.
Для определения закона изменения сигнала на ИС при отклонении оси визирования антенны от номинального положения выполняется изменение ориентации КА по выбранной схеме. Для наглядности приводится фиг.1, на которой изображена ИС, координаты которой в системе координат OXYZ определяются вектором  , точка визирования антенны КА, координаты которой определены вектором
, точка визирования антенны КА, координаты которой определены вектором  , точка отклонения оси антенны КА
, точка отклонения оси антенны КА  , V, U - долгота и широта ИС. Изменение ориентации КА должно быть таким, чтобы сигнал на всех ИС, координаты которых известны с высокой точностью, изменялся как в сторону увеличения, так и в сторону уменьшения. При изменении ориентации КА в заданные моменты времени измеряется сигнал (S) на ИС. По известной ориентации КА в текущий момент времени определяются координаты точки визирования ТВ' оси антенны на поверхности планеты (фиг.1). Используя свойства скалярного произведения векторов, находим угловое расстояние между номинальной (ТВ) и текущей (ТВ') точками визирования (угол γ между векторами
, V, U - долгота и широта ИС. Изменение ориентации КА должно быть таким, чтобы сигнал на всех ИС, координаты которых известны с высокой точностью, изменялся как в сторону увеличения, так и в сторону уменьшения. При изменении ориентации КА в заданные моменты времени измеряется сигнал (S) на ИС. По известной ориентации КА в текущий момент времени определяются координаты точки визирования ТВ' оси антенны на поверхности планеты (фиг.1). Используя свойства скалярного произведения векторов, находим угловое расстояние между номинальной (ТВ) и текущей (ТВ') точками визирования (угол γ между векторами  и
и  на фиг.1):
на фиг.1):
Далее ставим в соответствие полученному углу γ сигнал на ИС, определяя таким образом, закон изменения сигнала на ИС при изменении ориентации КА. В случае, когда форма планеты аппроксимируется сферой, можно использовать закон изменения сигнала на ИС в виде функции S(γ) - зависимости сигнала от углового расстояния, на котором будет находиться точка визирования антенны от номинальной точки визирования на поверхности планеты при текущем значении сигнала на ИС. Если планета аппроксимируется более сложной фигурой, то предпочтительным является закон изменения сигнала в зависимости от линейного расстояния, на котором будет находиться точка визирования антенны от номинальной точки визирования на поверхности планеты при текущем значении сигнала на ИС. Дальнейшие рассуждения будут приводиться для случая моделирования формы планеты сферой, т.к. этот вариант представляется наиболее наглядным и применим в значительном числе случаев.
При получении сигнала от антенны КА на ИС выполняется сравнение этого сигнала с исходным. В случае отклонения полученного сигнала по определенному ранее закону изменения сигнала на ИС определяется область визирования антенны КА на поверхности планеты. Логично предположить, что эта область будет представлять собой круг, контур которого вычерчивается на поверхности планеты концом вектора с началом в т. О системы координат OXYZ, при его движении по конусу вращения, осью симметрии которого является прямая, совпадающая с радиусом-вектором ИС в данной системе координат. Угол полураствора конуса будет равен углу γ (фиг. 1). В системе координат OXYZ эта область будет описываться в виде:
x = R cosU cosV
y = R cosU sinV (2),
z = R sinU
где U - широта, V - долгота точки на поверхности планеты (фиг.1); R - радиус сферы, аппроксимирующей форму планеты. Размер области определяется широтой и долготой точек окружности, ограничивающей данную область:
Здесь Uис - широта, Vис - долгота ИС на поверхности планеты.
По описанной методике определяется допустимая область визирования для каждой ИС:
где  - долгота и широта n-й ИС, U1, V1. ...UN, VN - долгота и широта допустимых областей визирования антенны КА для n-й ИС. N - число рассматриваемых ИС. Решая систему неравенств (4), получим область визирования антенны КА в системе координат OXYZ, удовлетворяющую всем рассматриваемым ИС. На фиг.2 показан случай определения области визирования и затем точки визирования (т. ТВ') антенны для трех ИС. На нем координаты текущей точки визирования антенны на поверхности планеты в системе координат OXYZ определены вектором
- долгота и широта n-й ИС, U1, V1. ...UN, VN - долгота и широта допустимых областей визирования антенны КА для n-й ИС. N - число рассматриваемых ИС. Решая систему неравенств (4), получим область визирования антенны КА в системе координат OXYZ, удовлетворяющую всем рассматриваемым ИС. На фиг.2 показан случай определения области визирования и затем точки визирования (т. ТВ') антенны для трех ИС. На нем координаты текущей точки визирования антенны на поверхности планеты в системе координат OXYZ определены вектором  , в ССК - вектором
, в ССК - вектором  , координаты точки визирования антенны (т. ТВ) в ССК - вектором
, координаты точки визирования антенны (т. ТВ) в ССК - вектором  . Закрашенные окружности определяют возможные области визирования антенны для каждой ИС. Пересечение этих областей визирования закрашено самым темным цветом и определяет область визирования антенны КА. Размер полученной области, а следовательно, и точность определения точки визирования антенны, зависит от числа ИС, их взаимного расположения. Угловой размер области в ССК зависит в том числе и от расстояния КА от поверхности планеты. Логично принять за точку визирования точку, близкую к геометрическому центру области визирования, тогда точность определения точки визирования (т. ТВ' на фиг.2) составит величину, равную половине максимального углового размера найденной области визирования в ССК (угол ϕ на фиг.2).
. Закрашенные окружности определяют возможные области визирования антенны для каждой ИС. Пересечение этих областей визирования закрашено самым темным цветом и определяет область визирования антенны КА. Размер полученной области, а следовательно, и точность определения точки визирования антенны, зависит от числа ИС, их взаимного расположения. Угловой размер области в ССК зависит в том числе и от расстояния КА от поверхности планеты. Логично принять за точку визирования точку, близкую к геометрическому центру области визирования, тогда точность определения точки визирования (т. ТВ' на фиг.2) составит величину, равную половине максимального углового размера найденной области визирования в ССК (угол ϕ на фиг.2).
Следующим шагом решения задачи коррекции является определение положения оси антенны КА в ССК. Зная текущее положение КА (начало ССК - вектор  ), координаты точки визирования антенны на поверхности планеты в системе координат OXYZ (
), координаты точки визирования антенны на поверхности планеты в системе координат OXYZ ( на фиг.2) и матрицу А перехода OXYZ от к ССК, полученную по нескорректированной информации об ориентации КА, находим вектор с началом в т.С ССК, направленный в текущую точку визирования в ССК (
на фиг.2) и матрицу А перехода OXYZ от к ССК, полученную по нескорректированной информации об ориентации КА, находим вектор с началом в т.С ССК, направленный в текущую точку визирования в ССК ( на фиг.2):
на фиг.2):
Используя свойства векторного и скалярного произведения векторов, найдем угол δ между векторами  и
и  , являющийся ошибкой определения ориентации КА, и вектор
, являющийся ошибкой определения ориентации КА, и вектор  , вокруг которого нужно повернуть систему координат ССК на угол δ для того, чтобы скорректировать текущую ориентацию КА:
, вокруг которого нужно повернуть систему координат ССК на угол δ для того, чтобы скорректировать текущую ориентацию КА:
После определения ошибки ориентации корректируется ориентация КА путем восстановления ориентации, разворотом КА из текущей ориентации в исходную вокруг вектора  на угол δ с помощью исполнительных органов КА, например маховиков или гиродинов, или внесением поправок в информацию об угловом положении КА для дальнейшего использования в расчетах, связанных с управлением ориентацией.
на угол δ с помощью исполнительных органов КА, например маховиков или гиродинов, или внесением поправок в информацию об угловом положении КА для дальнейшего использования в расчетах, связанных с управлением ориентацией.
В качестве примера рассмотрим коррекцию ориентации стационарного спутника связи, снабженного БРК (фиг.1). Построена следующая ориентация КА в орбитальной системе координат (ОСК), задаваемая углами Крылова:
λY = 0; λx = 0; λz = 270°;
КА стабилизирован в ОСК. Вектор его угловой скорости (в связанной со спутником системе координат (ССК)): = (0,0,-0,004166667)T o/с
= (0,0,-0,004166667)T o/с
В начальный момент времени вектор состояния КА во вращающейся гринвичской системе координат (ГСК) следующий: = (473.111238, 42159.198480, 14.616804)T км
= (473.111238, 42159.198480, 14.616804)T км = (-0.00039154580,-0.00007124020,0.00071268440)T км/с,
= (-0.00039154580,-0.00007124020,0.00071268440)T км/с,
где  - радиус вектор и вектор скорости КА соответственно.
- радиус вектор и вектор скорости КА соответственно.
Координаты точки визирования антенны КА в ГСК (т. ТВ на фиг.1): = (71.571,6377.758,188.103)Т км
= (71.571,6377.758,188.103)Т км
Долгота точки V=89.357o, широта U=1.69o.
Будем рассматривать сигнал (S0) при нахождении КА в исходной ориентации на десяти ИС, координаты которых в ГСК известны с высокой точностью и равны:
ИС 1:  = (2171.541, 5650.278, 2030.778)Т км - S01=16.011 Дб
= (2171.541, 5650.278, 2030.778)Т км - S01=16.011 Дб
ИС 2:  = (1934.042, 5691.955, 2150.912)Т км - S02=16.862 Дб
= (1934.042, 5691.955, 2150.912)Т км - S02=16.862 Дб
ИС 3:  = (-1615.571, 5887.765, 1868.005)Т км - S03=19.002 Дб
= (-1615.571, 5887.765, 1868.005)Т км - S03=19.002 Дб
ИС 4:  = (-2191.484, 5604.385, 2133.906)Т км - S04=15.393 Дб
= (-2191.484, 5604.385, 2133.906)Т км - S04=15.393 Дб
ИС 5:  = (-2000.129, 5286.702, 1995.669)Т км - S05=15.176 Дб
= (-2000.129, 5286.702, 1995.669)Т км - S05=15.176 Дб
ИС 6:  = (-1978.645, 5664.064, 2183.720)Т км - S06=17.875 Дб
= (-1978.645, 5664.064, 2183.720)Т км - S06=17.875 Дб
ИС 7:  = (2968.592, 5213.795, 2183.825)Т км - S07=14.766 Дб
= (2968.592, 5213.795, 2183.825)Т км - S07=14.766 Дб
ИС 8:  = (-2501.939, 5589.491, 1806.427)Т км - S08=15.192 Дб
= (-2501.939, 5589.491, 1806.427)Т км - S08=15.192 Дб
ИС 9:  = (2331.578, 5610.639, 1962.083)Т км - S09=15.561 Дб
= (2331.578, 5610.639, 1962.083)Т км - S09=15.561 Дб
ИС 10:  = (2059.622, 5697.099, 2016.509) км - S010=18.475 Дб
= (2059.622, 5697.099, 2016.509) км - S010=18.475 Дб
Угловое расстояние между точкой визирования и i-й ИС находим следующим образом:
γ01 = 26.447o, γ02 = 28.026o,
γ03 = 22.144o, γ04 = 28.321o,
γ05 = 34.238o, γ06/ = 27.041o,
γ07= 36.225o,
γ08 = 30.683o,
γ09 = 27.263o, γ010= 28.720o.
Зная координаты каждой ИС, получим их долготу (V) и широту (U) по формулам:
Т.о. имеем:
V1 = 68.977o; U1 = 18.546o; V2 = 71.233o; U2 = -19.687o;
V3 = 105.344o; U3 = 17.012o; V4 = 111.357o; U4 = 19.525o;
V5 = 119.344o; U5 = 18.214o; V6 = 109.256o; U6 = 20.000o;
V7 = 60.344o; U7 = -20.001o; V8 = 114.114o; U8 = -16.435o;
V9 = 67.434o; U9 = 17.897o; V10 = 70.124o; U10 = -18.411o.
Определим закон изменения сигнала на ИС при изменении текущей ориентации КА. Будем вращать КА из текущей ориентации сначала вокруг оси ZCCK, а затем вокруг оси Yсск на ± 5o и измерять сигнал на рассматриваемых ИС. Результаты измерений сигнала в зависимости от угла γ = α+Δγ (фиг.1, Δγ- приращение угла α при изменении ориентации КА) занесем в таблицу. Для ИС 1 α = γ01 = 26.447o.
По полученным данным построим график изменения сигнала на данной ИС в зависимости от углового расстояния между ИС и радиусом-вектором точки визирования антенны КА (S(γ), aиг.3). Из графика видно, что закон изменения сигнала при изменении угла α на угол γ1(S1(γ1))) на 1-й ИС можно считать линейным и записать в виде:
Аналогично определяются законы изменения сигналов на всех остальных ИС:


Таким образом, получены законы изменения сигналов на всех рассматриваемых ИС. Единожды полученные, эти законы будут использоваться при всех последующих коррекциях ориентации КА, если не произойдет изменение сигнала, связанное с изменением параметров передающей или принимающей антенн.
Следующим шагом решения задачи в случае, если сигнал на ИС изменился без запланированного изменения ориентации КА, является определение возможных областей визирования антенны КА. Пусть сигнал на ИС 1 стал равен S1(γ1)= 15.7 Дб, т.е. уменьшился на 0,311 Дб. Это значит, что угловое расстояние между точкой визирования (т. ТВ на фиг.1) и текущей точкой визирования увеличилось. Из закона изменения сигнала (12) на данной ИС находим приращение угла α между радиусом-вектором ИС и возможным направлением визирования антенны КА:
Аналогичные действия выполняем для остальных ИС:
S2(γ2) = 16.521 Дб, Δγ2 = -0.302°.
S3(γ3) = 19.440 Дб, Δγ3 = 0.359°.
S4(γ4) = 15.605 Дб, Δγ4 = 0.195°.
S5(γ5) = 15.381 Дб, Δγ5 = 0.190°.
S6(γ6) = 18.012 Дб, Δγ6 = 0.130°.
S7(γ7) = 14.397 Дб, Δγ7 = -0.358°.
S8(γ8) = 15.296 Дб, Δγ8 = 0.096°.
S9(γ9) = 15.221 Дб, Δγ9 = -0.309°.
S10(γ10) = 18.107 Дб, Δγ10 = -0.337°.
Т. о., мы определили приращение углового расстояния между т.ТВ и текущей точкой визирования (т. TB' на фиг.1). Само же угловое расстояние i-й ИС будет равно:
γi = γ0i-Δγi,
γ1 = 26.71°, γ2 = 28.328°,
γ3 = 21.785°, γ4 = 28.126°,
γ5 = 34.048°, γ6 = 26.911°,
γ7 = 36.583°, γ8 = 30.587°,
γ9 = 27.572°, γ10 = 28.157°.
Возможная область визирования антенны КА для каждой ИС будет определяться согласно (3). Ее графическое представление показано на фиг.4. На плоскости V, U представлены дуги окружностей, соответствующие границам возможных областей визирования для каждой ИС. Серым цветом обозначена область пересечения окружностей, являющаяся областью визирования антенны КА. Наиболее вероятной точкой визирования антенны КА (т.TB' на фиг.4) в этой области является центр области. Тогда точность определения точки визирования будет не хуже половины наибольшего размера данной области. В данном случае точность не хуже 0.1205o≈7.23'. В случае необходимости повышения точности результата можно решать задачу оптимизации координат точки в полученной области любым из методов, пригодных для решения задачи, например, методом перебора точек, используя полученные законы изменения сигналов на каждой ИС. Следует еще раз обратить внимание на то, что точность результата решения задачи в существенной степени зависит даже не от числа и расположения ИС относительно точки визирования (т. ТВ на фиг.4), хотя это тоже немаловажно, а от точности определения закона изменения сигнала на ИС при изменении ориентации КА.
Координаты текущей точки визирования антенны КА на поверхности планеты в ГСК:
V = 89.65o U = 1.75o
x = R cosU cosV = 38.887 км
у = R cosU sinV = 6374.333 км
z = R sinU = 194.534 км
R = 6378.16 км
Используя полученный вектор  и матрицу перехода от ГСК к ССК (А), полученную в предположении, что эксперимент проходил 4.11.1999г. в 15.0.0 по декретному московскому времени, зная ориентацию КА в ОСК, по (5) определим координаты т. ТВ' в ССК (вектор
и матрицу перехода от ГСК к ССК (А), полученную в предположении, что эксперимент проходил 4.11.1999г. в 15.0.0 по декретному московскому времени, зная ориентацию КА в ОСК, по (5) определим координаты т. ТВ' в ССК (вектор  ):
):
Используя свойства векторного и скалярного произведения векторов, найдем угол δ между векторами  и
и  , являющийся ошибкой определения ориентации КА, и вектор
, являющийся ошибкой определения ориентации КА, и вектор  , вокруг которого нужно повернуть систему координат ССК на угол δ для того, чтобы скорректировать текущую ориентацию КА (6):
, вокруг которого нужно повернуть систему координат ССК на угол δ для того, чтобы скорректировать текущую ориентацию КА (6):

После определения текущей ориентации КА проводят коррекцию его ориентации путем разворота КА, например, с помощью гиродинов или маховиков на угол δ вокруг вектора  .
.
Предлагаемый способ управления ориентацией космического аппарата, снабженного бортовым радиотехническим комплексом, позволяет проводить коррекцию ориентации КА при его работе в штатном режиме. Точность данного способа зависит в основном от точности определения закона изменения сигнала на ИС при изменении ориентации КА, количества ИС и их расположения относительно точки визирования антенны КА.
Источники информации
1. И.Ф.Кавинов "Инерциальная навигация в околоземном пространстве". М., "Машиностроение", 1988 г.
2. Б.В.Раушенбах, Е.Н.Токарь "Управление ориентацией космических аппаратов". М., "Наука", 1974 г.

Изобретение относится к космической технике и может быть использовано для управления ориентацией космических аппаратов (КА). Способ включает в себя определение, построение и поддержание исходной ориентации КА, измерение исходных и текущих параметров источников сигнала и определение по ним текущей ориентации КА, а также коррекцию ориентации КА. Строят и поддерживают такую исходную ориентацию КА, при которой ось антенны бортового радиотехнического комплекса (БРК) направлена в заданную точку визирования на поверхности планеты. Измеряют исходный сигнал на измерительных станциях (ИС), находящихся в области видимости КА, определяют закон изменения сигнала БРК на ИС при его измерении в процессе изменения ориентации КА, обеспечивающего приращение исходного сигнала разных знаков и амплитуд. Строят и поддерживают заданную ориентацию КА, параметры которой совпадают с параметрами исходной ориентации, измеряют текущий сигнал на ИС и в случае его отклонения от исходного рассчитывают по определенному закону изменения сигнала на ИС положение оси антенны. По измеренному и рассчитанному положению оси антенны определяют текущую ориентацию КА и проводят ее коррекцию. Изобретение позволяет обеспечить управление КА при движении по освещенной Солнцем части орбиты и повысить точность определения ориентации. 4 ил., 1 табл.
Способ управления ориентацией космического аппарата, снабженного бортовым радиотехническим комплексом, включающий определение, построение и поддержание исходной ориентации космического аппарата, измерение исходных и текущих параметров источников сигнала, определение по текущим и исходным параметрам источников сигнала текущей ориентации космического аппарата, коррекцию ориентации космического аппарата, отличающийся тем, что производят построение и поддержание такой исходной ориентации, при которой ось антенны бортового радиотехнического комплекса направлена в заданную точку визирования на поверхности планеты, измеряют исходный сигнал на выбранных измерительных станциях, находящихся в области видимости космического аппарата, определяют закон изменения сигнала от бортового радиотехнического комплекса на измерительных станциях путем измерения исходного сигнала от бортового радиотехнического комплекса на измерительных станциях при изменении ориентации космического аппарата, обеспечивающего приращения исходного сигнала на измерительных станциях, имеющие разные знаки и амплитуды, строят и поддерживают заданную ориентацию космического аппарата, параметры которой совпадают с параметрами исходной ориентации, измеряют текущий сигнал на измерительных станциях и в случае его отклонения от исходного рассчитывают по определенному закону изменения сигнала на измерительных станциях положение оси антенны бортового радиотехнического комплекса космического аппарата, по измеренному и рассчитанному положению оси антенны бортового радиотехнического комплекса космического аппарата определяют текущую ориентацию космического аппарата и проводят коррекцию его ориентации.
| Раушенбах Б.В., Токарь Е.Н | |||
| Управление ориентацией космических аппаратов | |||
| - М.: Наука, 1974, с | |||
| Цилиндрический сушильный шкаф с двойными стенками | 0 |
|
SU79A1 |
| Кавинов И.Ф | |||
| Инерциальная навигация в околоземном пространстве | |||
| - М.: Машиностроение, 1988, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| RU 2053939 C1, 10.02.1996 | |||
| СПОСОБ УПРАВЛЕНИЯ КИНЕТИЧЕСКИМ МОМЕНТОМ КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ КОРРЕКЦИИ ОРБИТЫ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2001 |
|
RU2178760C1 |
| US 4306692 A, 22.12.1981 | |||
| US 5205518 A, 27.04.1993 | |||
| Способ гидрогеодинамической очистки от нефтепродуктов водоносных пластов и гидрогеодинамическая ловушка для нефтепродуктов | 2017 |
|
RU2666561C1 |

