Изобретение относится к области приборостроения и может быть использовано в системах контроля маршрутов следования подвижных объектов.
Известен способ определения координат контрольных точек маршрута, описанный в патенте США N 4539760, кл. G 01 C 17/38, 1985 г. "Электронный компас навигационной системы для транспортных средств, содержащий три датчика магнитного поля, датчики наклона и устройство памяти".
Известный способ заключается в следующем:
1) в калибровочном цикле осуществляют движение объекта по заданной траектории с заданными углами крена и тангажа и проводят измерение суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
2) по измеренным значениям определяют коэффициенты коррекции магнитного поля - координаты центра эллипсоида магнитного годографа, девять значений косинусов направления осей эллипсоида и три коэффициента масштабирования осей эллипсоида;
3) в каждом рабочем цикле проводят измерения проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
4) проводят с учетом коэффициентов коррекции компенсацию магнитного поля объекта;
5) проводят определение горизонтальных проекций МПЗ с учетом измеренных углов тангажа и крена;
6) по значениям горизонтальных проекций МПЗ определяют азимутальный угол направления движения, по которому с учетом скорости перемещения определяют координаты точек маршрута следования объекта.
Известный способ определения координат контрольных точек маршрута следования объекта отличается большой сложностью.
Реализация указанного способа требует больших аппаратных затрат, высокого быстродействия вычислительных узлов, большого энергопотребления. Все это ограничивает область применения способа.
Наиболее близким по технической сущности к предлагаемому способу является способ определения координат контрольных точек маршрута, описанный в патенте Российской Федерации N 2098764; G 01 C 21/08, 1997 г. "Способ определения местоположения подвижных объектов и устройство для его реализации".
Известный способ заключается в следующем:
1) в калибровочном цикле осуществляют разворот подвижного объекта на угол не менее 360 градусов и проводят определение значений горизонтальных проекций суммарного вектора напряженности магнитного поля Земли (МПЗ) и магнитного поля объекта в четырех точках годографа горизонтальной составляющей магнитного поля;
2) по контрольным значениям горизонтальных проекций определяют коэффициенты коррекции годографа горизонтальной составляющей магнитного поля - смещение центра эллипса, малую и большую полуоси эллипса и угол доворота осей;
3) в каждом рабочем цикле измеряют усредненные за время 0,1...2,0 с значения проекций ускорения силы тяжести и суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
4) по измеренным значениям проекций с учетом коэффициентов коррекции, полученных в калибровочном цикле, определяют значения горизонтальных проекций вектора напряженности МПЗ на оси горизонтальной системы координат объекта;
5) по значениям горизонтальных проекций вектора напряженности МПЗ с учетом приращения пути определяют в рабочем цикле приращения координат и угол направления движения;
6) с учетом координат исходной точки определяют координаты объекта.
Известный способ предназначен для определения координат местоположения (в том числе контрольных точек маршрута следования) и угла направления движения подвижных наземных объектов. Способ относится к автономным навигационным системам магнитного типа, использующим МПЗ для определения направления движения и одометрическую систему счисления пути для определения приращений пути.
Недостатком известного способа является сложность его использования в системах контроля маршрутов следования подвижных объектов. Это связано с тем, что указанный способ перед проведением измерений координат на объекте требует выполнения ряда калибровочных операций. К ним, в первую очередь, следует отнести операцию определения коэффициентов коррекции годографа горизонтальной составляющей магнитного поля. Для этого в калибровочном цикле осуществляют разворот подвижного объекта на угол не менее 360 градусов и с помощью устройства, реализующего известный способ, проводят определение в четырех точках значений горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, по которым определяют коэффициенты коррекции магнитного поля. Во-вторых, для навигационных систем, использующих известный способ, необходима предварительная коррекция настраиваемых параметров. Для автономной навигационной системы магнитного типа такими параметрами являются поправка направления для курсовой системы и коэффициент пути для путевой системы. Поправка направления зависит от магнитного склонения в данной местности и рассогласования измерительной оси датчиков и продольной оси подвижного объекта. На подвижных объектах широко используются одометрические системы счисления пути, основанные на подсчете числа оборотов колеса или привода гусеницы. Коэффициент пути, определяющий пересчет числа оборотов в пройденный путь, зависит от состояния ходовой части: типа шин, давления в них и т.п., характера местности. Определение поправки направления и коэффициента пути проводят на контрольном участке с известными координатами начальной и конечной точек.
При установке блока датчиков угловой ориентации на объект необходимо выдерживать соосность его измерительной оси и продольной оси подвижного объекта. Все это усложняет и во многих случаях делает невозможным использование известного способа.
Кроме этого, устройство, устанавливаемое на подвижный объект и реализующее известный способ, требует достаточно мощных вычислительных средств, что приводит к увеличению энергопотребления и аппаратных затрат. Это также ограничивает возможность использования известного способа.
Задача, на решение которой направлено заявляемое изобретение, заключается в упрощении способа и расширении области применения.
Технический результат, который может быть получен при осуществлении предлагаемого способа, заключается в сокращении времени подготовки к проведению измерений и в упрощении выполнения операций контроля маршрутов следования подвижных объектов, а также в снижении энергопотребления, габаритов и массы устройства, реализующего предлагаемый способ и устанавливаемого на подвижный объект.
Для решения поставленной задачи предлагается способ, который заключается в следующем:
1) определяют по значениям проекций суммарного вектора напряженности МПЗ и магнитного поля объекта коэффициенты коррекции годографа горизонтальной составляющей магнитного поля;
2) измеряют в каждом рабочем цикле приращения пройденного пути, усредненные значения проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
3) определяют с учетом коэффициентов коррекции по значениям проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта значения горизонтальных проекций вектора напряженности МПЗ;
4) по значениям горизонтальных проекций вектора напряженности МПЗ определяют угол направления движения и с учетом приращения пройденного пути определяют приращения координат, по которым, с учетом координат начальной точки определяют координаты объекта.
Кроме этого, предлагаемый способ включает следующее:
1) на первом этапе на протяжении всего маршрута следования подвижного объекта формируют массив данных, содержащий измеренные в каждом рабочем цикле приращения пройденного пути, усредненные значения проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
2) на втором этапе после прохождения подвижным объектом всего маршрута определяют на основе сформированного массива данных коэффициенты коррекции годографа горизонтальной составляющей магнитного поля, определяют для каждого рабочего цикла горизонтальные проекции вектора напряженности МПЗ, угол направления движения, приращения координат и координаты объекта;
3) проводят коррекцию координат точек маршрута с учетом координат конечной точки;
4) в качестве усредненных значений проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта проводят измерение усредненных значений горизонтальных проекций ускорения силы тяжести и горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат.
Формирование на первом этапе на протяжении всего маршрута следования подвижного объекта массива данных и определение на втором этапе на основе сформированного массива данных после прохождения объектом маршрута коэффициентов коррекции годографа горизонтальной составляющей магнитного поля, горизонтальных проекций вектора напряженности МПЗ, углов направления движения, приращений координат и координат объекта и проведение коррекции координат объекта с учетом координат конечной точки маршрута обеспечивает сокращение времени подготовки к проведению измерений на подвижном объекте и упрощение выполнения операций контроля маршрутов следования подвижных объектов в сравнении с известным способом.
Это достигается, во-первых, тем, что на подвижном объекте не проводятся длительные и сложные операции по определению коэффициентов коррекции годографа горизонтальной составляющей магнитного поля, а также поправки направления и коэффициента пути. Практически вся подготовка к проведению измерений на подвижном объекте заключается в закреплении на его корпусе устройства, обеспечивающего измерение и формирование массива данных. При этом отсутствует необходимость ориентации измерительной оси устройства в направлении движения (вдоль продольной оси объекта).
Во-вторых, определение коэффициентов коррекции, поправки направления и коэффициента пути, а также всех остальных навигационных параметров маршрута проводится в автоматическом режиме на стационарной ЭВМ с использованием сформированного массива данных, что требует минимального контроля со стороны оператора.
Кроме этого, формирование массива данных, содержащего измеренные в рабочем цикле приращения пройденного пути и усредненные значения проекций ускорения силы тяжести и проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, в качестве которых измеряют усредненные значения горизонтальных проекций ускорения силы тяжести и горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта, обеспечивает упрощение и снижение энергопотребления устройства, реализующего указанные функции и устанавливаемого на объект. Это связано с уменьшением количества датчиков ускорения и магнитного поля, а также с упрощением обработки информации. Фактически на подвижном объекте проводятся только измерение и накопление исходной навигационной информации минимального объема. Основная обработка проводится на ЭВМ после прохождения объектом маршрута. Это позволяет выполнить устройство, устанавливаемое на подвижный объект, с минимальным потреблением и габаритами.
Все это обеспечивает решение задачи, на которое направлено заявляемое изобретение.
На фиг. 1 представлена система координат подвижного объекта; на фиг.2 - вариант коррекции маршрута; на фиг.3 - структурная схема устройства для контроля маршрутов следования подвижных объектов.
Предлагаемый способ заключается в следующем
На первом этапе с помощью двух датчиков линейного ускорения, двух датчиков магнитного поля и датчика пути, устанавливаемых на контролируемый подвижный объект, проводят в каждом рабочем цикле измерение приращения пройденного пути и усредненных за рабочий цикл значений горизонтальных проекций ускорения силы тяжести и горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат и формируют массив данных из измеренных значений на протяжении всего маршрута следования подвижного объекта. Для подвижных наземных объектов рабочий цикл выбирается из диапазона 0,1...2,0 с.
Сформированный массив данных, а также значения координат начальной и конечной точек маршрута следования объекта являются исходной информацией для определения пройденного объектом маршрута. Координаты начальной и конечной точек маршрута определяются любым известным способом.
Определим приборную систему координат OXYZ (фиг.1) следующим образом: ось OY направим вдоль продольной оси подвижного объекта в направлении движения, ось OZ - вдоль вертикальной оси объекта, а ось OX - вдоль поперечной оси объекта. Введем связанную с объектом горизонтальную систему координат OXBYBZB следующим образом: ось OZB направим вертикально вверх, ось OYB - в направлении движения в горизонтальной плоскости, ось OXB - перпендикулярно направлению движения.
Известно, что для определения магнитного курса объекта необходимо знать три проекции АX, AY, АZ ускорения силы тяжести и три проекции НX, НY, НZ вектора напряженности МПЗ на оси приборной системы координат. Однако для геомагнитных навигационных систем, предназначенных для установки на наземные подвижные объекты, значения Z-компонентов можно получить также и расчетным путем, без непосредственных измерений. Реализация такого варианта связана с отсутствием больших наклонов при движении наземных объектов.
Это позволяет отказаться от измерения АZ- компоненты, заменяя ее в расчетных формулах значением:
где А - принимается равной усредненной величине ускорения силы тяжести (9,81 м/с2).
Аналогичным образом может быть определена величина НZ:
где Н - величина полного вектора напряженности МПЗ.
Значение Н определяется для каждого региона либо по магнитной карте, либо путем прямого измерения магнитного поля Земли вне объекта в отсутствиb паразитных магнитных полей.
Осуществляя преобразование компонент вектора Н из приборной системы координат в горизонтальную, получим:
HXB = 1/A' (AZHX - AXHZ);
HYB = 1/AA' [(A')2HY - AY (AXHX - AZHX)], (3)
где НXB, HYB - горизонтальные составляющие магнитного поля соответственно в поперечном и продольном направлении движения объекта;
АZ, НZ - определены в соответствии с (1) и (2).
Магнитный азимут αm направления движения может быть определен по значениям горизонтальных проекций МПЗ из выражений:

где  - горизонтальная составляющая МПЗ.
- горизонтальная составляющая МПЗ.
В идеальном случае при отсутствии паразитных магнитных полей значения НXB, HYB, определенные в соответствии с (3), могут быть использованы для определения азимутального угла направления движения. На практике идеальный магнитный годограф горизонтальной составляющей магнитного поля, имеющей форму окружности, смещен относительно начала координат из-за постоянного магнитного поля, создаваемого подвижным объектом, и из-за индуцированного магнитного поля принимает форму эллипса, оси которого в общем случае не параллельны осям чувствительности датчиков и, следовательно, необходимо провести преобразование координат, которые переводили бы эллипс в окружность. На практике для наземных подвижных объектов угол поворота осей эллипса можно не учитывать, т.е. достаточно определить смещение центра эллипса и его полуоси a и b.
В предлагаемом способе определение коэффициентов коррекции годографа горизонтальной составляющей магнитного поля проводится на основе измеренных значений проекций АX, АY ускорения силы тяжести и проекций НX, НY суммарного вектора напряженности МПЗ и магнитного поля объекта из сформированного на маршруте массива данных. Для вычисления коэффициентов коррекции из этого массива данных выбираются только те значения, которые получены при равномерном движении объекта на прямолинейных ровных или с небольшим уклоном участках дорог разного направления. Критерием того, что указанные требования выполнены, являются минимальные изменения в течение нескольких рабочих циклов значений приращений пройденного пути, проекций НX, HY и близкие к нулю значения АX, AY. Усредненные значения АX, АY, НX, НY, соответствующие каждому направлению, записываются в базу исходных данных для расчета коэффициентов коррекции годографа горизонтальной составляющей магнитного поля.
Расчет коэффициентов коррекции проводится в два этапа. Вначале годограф аппроксимируется окружностью со смещенным центром. Для этого из вновь сформированной базы данных в координатах НXB, НYB выбираются три точки, наиболее удаленные друг от друга, и через них проводится окружность, т.е. определяется ее центр и радиус. Затем координаты центра окружности и ее радиус уточняются по всей базе данных методом наименьших квадратов с использованием последовательных приближений и тем самым определяют смещение центра окружности (эллипса - в первом приближении) δH
На втором этапе по всей базе исходных данных методом наименьших квадратов с использованием последовательных приближений определяют с учетом смещения центра окружности δH
После этого проводят коррекцию измеренных значений проекций НX, НY магнитного поля по всему сформированному на маршруте массиву данных путем учета смещения центра эллипса годографа магнитного поля и сжатия его осей:
Скорректированные значения Н'X, Н'Y используются для расчета горизонтальных проекций МПЗ в соответствии с (3).
По всему сформированному на маршруте массиву данных для каждого рабочего цикла определяют с учетом (3), (4) приращения δX, δY прямоугольных координат:
где δS - приращение пройденного пути за рабочий цикл.
Значения прямоугольных координат X, Y объекта на маршруте определяют из выражений:
Xi = Xo+∑δXi;
Yi = Yo+∑δYi, (7)
где X0, Y0 - координаты начальной точки.
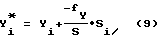
Возможный вид маршрута, координаты контрольных точек которого определены в соответствии с (7), показан на фиг.2 (маршрут N1). На фиг.2 показаны также маршрут N2, полученный после коррекции, и истинный маршрут N3.
Значительные отличия маршрута N1 от истинного (N3) объясняются следующими причинами:
1) рассогласованием измерительной оси блока датчиков линейного ускорения и магнитного поля с продольной осью подвижного объекта, которое при произвольной установке блока датчиков может достигать 180o. Угловые ошибки также возникают, если не учитывать магнитное склонение для данной местности;
2) неправильным выбором значения путевого множителя, который определяется конструктивными особенностями подвижного объекта. Например, если приращения пройденного пути определяются по числу оборотов колеса объекта, то в зависимости от типа используемых шин эта ошибка может составлять 10% и более.
Для компенсации указанных ошибок полученный маршрут необходимо довернуть на некоторый угол и провести его равномерное сжатие (растяжение) на всей длине. Для этого с учетом истинных координат конечной точки определяют угол доворота Δα и коэффициент пути KS = L/L' (фиг.2). Затем по всему сформированному массиву данных уточняют для каждого рабочего цикла приращения координат из выражений:

и в соответствии с (7) определяют скорректированные значения координат X, Y объекта.
В результате проведенной коррекции получаем маршрут (фиг.2, маршрут N2), близкий к истинному. При этом в общем случае ошибки определения координат минимальны в начале и конце маршрута и максимальны в центральной части маршрута. При использовании карты местности может быть проведена дополнительная коррекция координат точек маршрута. При этом на полученном маршруте выбирается характерная точка (как правило, в местах изменения направления движения), которая однозначно может быть идентифицирована с соответствующей точкой на местности, и определяются значения ошибок по координатам X, Y. Затем учитывая, что ошибки измерения координат в начальной и конечной точках маршрута равны нулю, проводят уравнивание координат. Этот метод заключается в том, что по значению ошибки, полученной в выбранной точке, проводится коррекция координат для двух участков маршрута - от выбранной точки до начала и конца маршрута. Уравнивание координат проводят в соответствии со следующими выражениями:
где X*i, Y*i - координаты после уравнивания;
Xi, Yi - исходные координаты;
fX, fY - значения ошибок по координатам X, Y в выбранной точке маршрута;
S - протяженность маршрута от выбранной точки до начальной (конечной) точки;
Si - длина пути от выбранной точки до i-й точки маршрута.
Целесообразность использования выражений (9) объясняется тем, что ошибки определения координат рассматриваемой навигационной системы (магнитного типа) являются преимущественно систематическими.
Описанным выше способом уравнивание координат можно проводить многократно для более коротких отрезков маршрута. В конечном итоге погрешности определения координат будут зависеть от точности используемой карты.
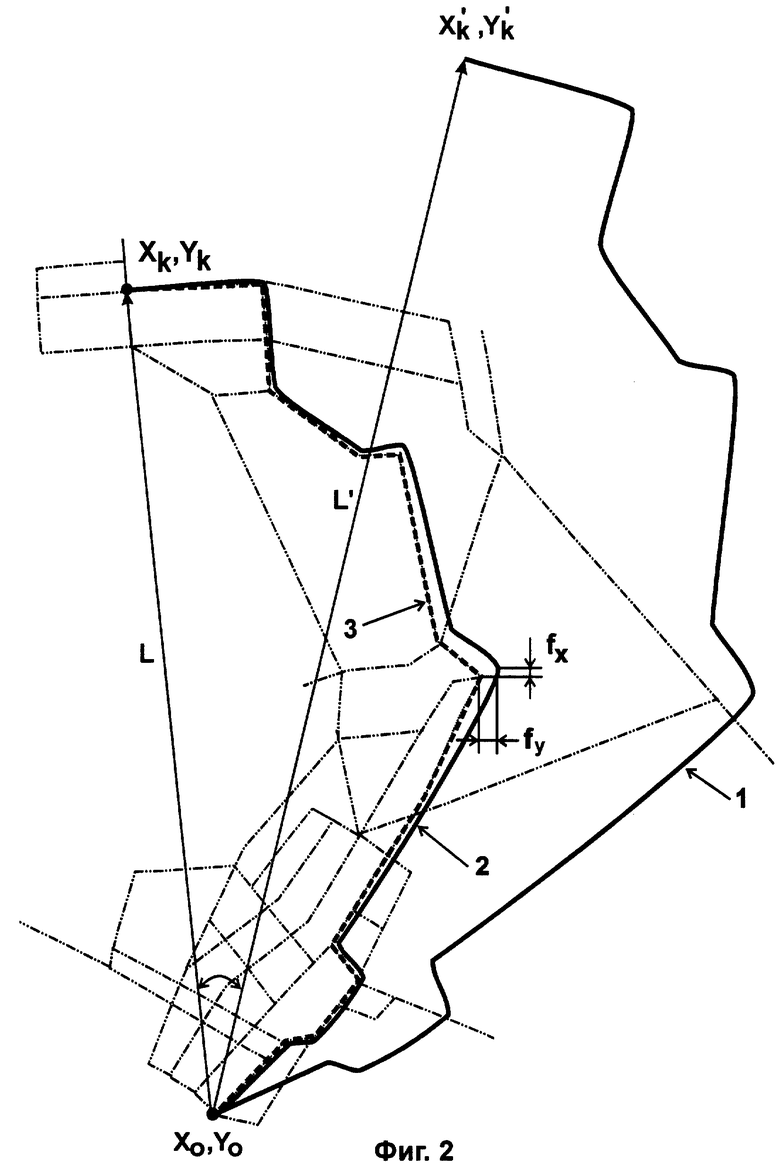
На фиг.3 представлена схема устройства, реализующего предлагаемый способ контроля маршрутов следования подвижных объектов. Устройство содержит автономный навигационный блок 1 и электронно-вычислительную машину (ЭВМ) 2. Автономный навигационный блок 1 содержит два датчика магнитного поля 3, два датчика линейного ускорения 4, датчик пути 5, вычислительный блок 6 и блок памяти 7. Выходы датчиков магнитного поля 3 соединены с первыми входами вычислительного блока 6, вторые входы которого соединены с выходами датчиков линейного ускорения 4, выходы датчика пути 5 соединены с третьими входами вычислительного блока 6, первые выходы которого соединены с входами блока памяти 7, выходы которого соединены с четвертыми входами вычислительного блока 6, вторые выходы которого являются выходами автономного навигационного блока 1.
Контроль маршрута следования подвижных объектов осуществляется в два этапа.
На первом этапе автономный навигационный блок 1 устанавливается на подвижный объект и обеспечивает в каждом рабочем цикле (~1 с) измерение исходной навигационной информации и запись ее в блок памяти 7. К этой информации относятся показания датчиков магнитного поля 3, датчиков линейного ускорения 4 и датчика пути 5. В начальной и конечной точках маршрута любым из известных способов измеряются и запоминаются их координаты. Автономный навигационный блок 1 устанавливается на объект таким образом, чтобы оси чувствительности датчиков магнитного поля 3 и датчиков линейного ускорения 4 находились в плоскости, близкой к горизонтальной. Ориентация осей чувствительности в горизонтальной плоскости относительно какого-либо направления не требуется.
Второй этап реализуется на стационарной или портативной ЭВМ 2. Сформированный на всем протяжении маршрута следования массив данных, а также значения координат исходной и конечной точек маршрута пересылаются в ЭВМ, на которой осуществляется расчет коэффициентов коррекции годографа горизонтальной составляющей магнитного поля, поправки направления, коэффициента пути, расчет и коррекция координат точек маршрута.
В режиме измерения автономным навигационным блоком 1 исходных навигационных параметров два ортогонально расположенных датчика магнитного поля 3 и два датчика линейного ускорения 4 непрерывно формируют на своих выходах аналоговые сигналы, пропорциональные значениям проекций НX, НY суммарного магнитного поля МПЗ и магнитного поля объекта и проекций АX, AY ускорения силы тяжести на горизонтальные оси приборной системы координат. Указанные сигналы поступают на входы АЦП, встроенного в вычислительный блок 6, преобразуются в цифровую форму, усредняются за рабочий цикл и сохраняются в блоке памяти 7. Одновременно с датчика пути 5 поступает информация о приращениях пройденного пути за рабочий цикл и также сохраняется в блоке памяти. Таким образом, в блоке памяти 7 формируется массив исходных данных, необходимых для определения пройденного подвижным объектом маршрута.
Вычислительный блок может быть реализован на основе микроконтроллера типа MSP430F149, содержащего в том числе, встроенные АЦП, ОЗУ и постоянную память для хранения рабочих программ. В качестве датчиков линейного ускорения 4 могут быть использованы двухкомпонентные акселерометры типа ADXL210, датчиков магнитного поля - феррозонды. Датчик пути может быть выполнен на основе магнитоуправляемого контакта - геркона, устанавливаемого на неподвижный тормозной щит колеса. При каждом обороте колеса под воздействием магнита, который размещают на диске колеса, датчик вырабатывает сигнал, обеспечивающий определение вычислительным блоком 6 приращений пройденного пути.
После прохождения объектом маршрута накопленный в автономном навигационном блоке 1 массив данных, а также значения координат исходной и конечной точек маршрута пересылаются в ЭВМ 2, использование которой практически снимает все ограничения на возможности обработки информации.
В ЭВМ 2 вначале проводится расчет корректирующих коэффициентов годографа горизонтальной составляющей магнитного поля - смещение центра эллипса δHX, δHY и его полуоси а и b, затем проводится коррекция измеренных значений проекций НX, НY магнитного поля по всему сформированному на маршруте массиву данных в соответствии с (5). После этого для каждого рабочего цикла определяются в соответствии с (3) горизонтальные составляющие НXB, НYB в МПЗ и в соответствии с (4), (6), (7) координаты точек маршрута. Затем после определения угла доворота Δα и коэффициента пути КS осуществляется коррекция координат в соответствии с (8) и выдачей всей необходимой информации о маршруте, включая его визуализацию, на дисплей ЭВМ.
Технический результат от использования предлагаемого способа заключается в упрощении выполнения операций контроля маршрутов следования подвижных объектов и сокращении времени подготовки к измерениям на подвижном объекте. Это достигается тем, что на объекте не требуется проведение длительных и сложных операций по определению коэффициентов коррекции годографа магнитного поля, а также поправки направления и коэффициента пути. При этом вся подготовка к измерению заключается в закреплении на подвижном объекте устройства, реализующего предлагаемый способ. Окончательная обработка параметров маршрута производится на внешней ЭВМ в автоматическом режиме - после прохождения подвижным объектом всего маршрута следования.
Кроме этого, предлагаемый способ позволяет выполнить устройство, устанавливаемое на подвижный объект, с минимальными энергопотреблением и габаритами за счет уменьшения количества используемых датчиков и упрощения обработки результатов измерения.
Все это позволяет расширить область применения способа.
Наиболее успешно предлагаемый способ может быть использован в системах контроля маршрутов следования подвижных наземных объектов.
Изобретение относится к области приборостроения и может быть использовано в системах контроля маршрутов следования подвижных объектов. На первом этапе способа контроля маршрутов следования подвижных объектов измеряют в каждом рабочем цикле приращения пройденного пути, усредненные значения проекций ускорения силы тяжести и проекций суммарного вектора напряженности магнитного поля Земли (МПЗ) и магнитного поля объекта на оси приборной системы координат. Формируют из измеренных значений на протяжении всего маршрута следования массив данных. На втором этапе после прохождения подвижным объектом всего маршрута определяют на основе сформированного массива данных коэффициенты коррекции годографа горизонтальной составляющей магнитного поля. Определяют для каждого рабочего цикла горизонтальные проекции вектора напряженности МПЗ, угол направления движения, приращения координат и координаты объекта. С учетом координат конечной точки проводят коррекцию координат точек маршрута. Технический результат состоит в упрощении способа и расширении области его применения. 1 з.п.ф-лы, 3 ил.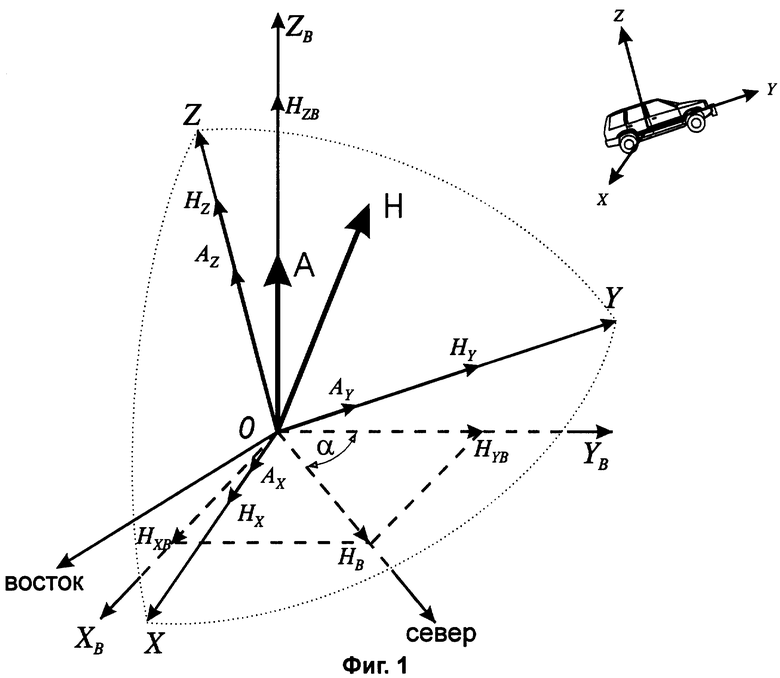
HXB= 1/A'(AZHX-AXHZ);
HYB= 1/AA'[(A')2HY-AY(AXHX-AZHZ)] ,
где НXB, HYB - горизонтальные проекции вектора напряженности МПЗ;
А - ускорение силы тяжести (9,81 м/с2);
AX, AY - горизонтальные проекции ускорения силы тяжести на оси приборной системы координат;
HX, HY - скорректированные значения горизонтальных проекций суммарного вектора напряженности МПЗ и магнитного поля объекта на оси приборной системы координат;
где Н - величина полного вектора напряженности МПЗ для данного региона.
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2098764C1 |
| US 4539760 А, 10.09.1985 | |||
| US 4743913 А, 10.05.1988 | |||
| АНАЛИЗАТОР ПРОЛЕТНОГО КВАДРУПОЛЬНОГО МАСС-СПЕКТРОМЕТРА (ТИПА ФИЛЬТР МАСС, "МОНОПОЛЬ" И "ТРИПОЛЬ") | 2009 |
|
RU2447539C2 |
| DE 3341347 A1, 23.05.1985 | |||
| ИНДУКЦИОННЫЙ КОМПАС | 0 |
|
SU395716A1 |

