Изобретение относится к системе рулевого управления для гусеничного транспортного средства.
Система рулевого управления гусеничного транспортного средства описана в Патенте США 08/795091, зарегистрированном 5 февраля 1997 г. и переданном правопреемнику этой заявки. В этой системе рычаг переключения передач может передвигаться между положениями, соответствующими стоянке, нейтральному положению, передней передаче и задней передаче. Рулевое колесо выводится в центральное положение пружиной и может вращаться в обоих направлениях до крайних положений. Также применяется электронный датчик положения рулевого колеса, который вырабатывает сигнал абсолютного положения рулевого колеса. Микропроцессорный блок управления осуществляет управление транспортным средством в качестве функции считанного положения рулевого колеса, положения рычага переключения передач и других входящих данных. Такое гусеничное транспортное средство предназначено для поворота или встречного вращения без какого бы то ни было движения вперед или назад. Также в этой системе функция рулевого управления выводится из действия электронным способом, когда рычаг переключения передач находится в положении для стоянки, и транспортное средство неподвижно. Было бы нежелательно для транспортного средства начинать поворот немедленно при движении рычага переключения передач из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи с выведенной из сцепления муфтой управления трансмиссии, если рулевое колесо не находится в центральном положении под воздействием пружины. Кроме того, было бы нежелательно, чтобы водитель должен был просто восстановить центральное положение рулевого колеса перед тем, как будет возможно управление машиной. Также желательно обеспечить действие рулевого управления, когда рычаг переключения передач находится в нейтральном положении или с включенной передачей, когда транспортное средство неподвижно. Таким образом, желательно создать систему рулевого управления гусеничного транспортного средства, выводящую из действия управление при движении рычага переключения передач из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи независимо от положения рулевого колеса, но дающую водителю полную возможность поворота без необходимости восстановления центрального положения рулевого колеса.
Соответственно, задачей этого изобретения является создание системы рулевого управления гусеничным транспортным средством, которая выводит из действия рулевое управление или встречное вращение при движении рычага переключения передач из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи независимо от положения рулевого колеса.
Другой задачей настоящего изобретения является создание такой системы, которая исключает рулевое управление или встречное вращение, как описано выше, но которая позволяет водителю восстанавливать способность рулевого управления или встречного вращения без необходимости восстановления центрального положения рулевого колеса.
Эта и другие задачи достигнуты при помощи настоящего изобретения, в котором блок управления выполняет алгоритм режима временного встречного вращения (TCR), когда рычаг переключения передач движется от положения для стоянки в нейтральное положение или от положения для стоянки в нейтральное положение для включения передачи при выведенной из сцепления муфте управления. Когда этот режим временного встречного вращения приведен в действие, управление может происходить двумя путями:
1. Поворотом рулевого колеса в его центральное положение и затем поворотом рулевого колеса в том или другом направлении от центрального положения или
2. Поворотом рулевого колеса в направлении одного из крайних положений (без установки рулевого колеса в центральное положение).
Если управление машиной или встречное вращение возможно первым путем, система управления управляет машиной нормальным способом, то есть темп поворота, как функция положения рулевого колеса, такой же как при нормальной работе.
Если управление машиной или встречное вращение возможно вторым путем, то в течение временного периода темп поворота как функция положения рулевого колеса будет меньшим, чем при нормальной работе. Если рулевое колесо постоянно повернуто в крайнее положение, система управления будет автоматически и постепенно увеличивать темп поворота (путем увеличения величины прироста темпа электронного управления) до получения полного нормального темпа поворота.
Если рулевое колесо вращается от крайнего положения, увеличение величины прироста прекратится и полученная в результате величина прироста поворота используется как новая величина прироста поворота. Эта величина прироста поворота постепенно доводится до номинального уровня по мере возвращения рулевого колеса в центральное положение. В центральном положении, если прирост поворота еще не достиг его номинальной величины, он будет доведен до номинальной величины. Соответствующий крайнему положению руля темп увеличения прироста поворота пропорционален соотношению скорости вращения привода и скорости вращения двигателя. В случае поворота на месте скорость вращения привода установлена равной константе, которая больше нуля.
Фиг. 1 изображает упрощенную схему привода гусеничного транспортного средства и системы управления согласно настоящему изобретению;
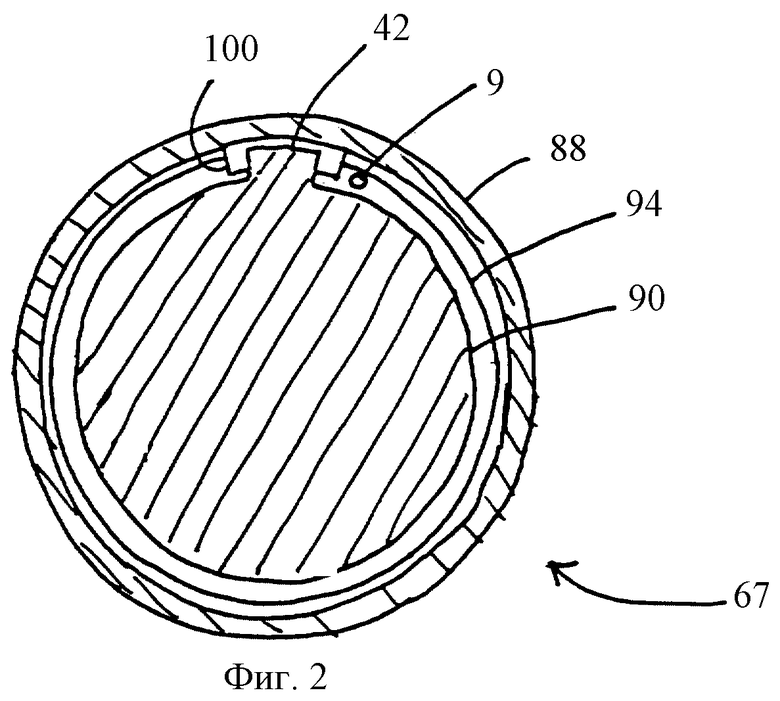
фиг. 2 изображает упрощенный вид сечения средства для установки рулевого колеса в центральное положение и фиксации крайних положений, которое может использоваться в связи с системой управления, показанной на фиг.1;
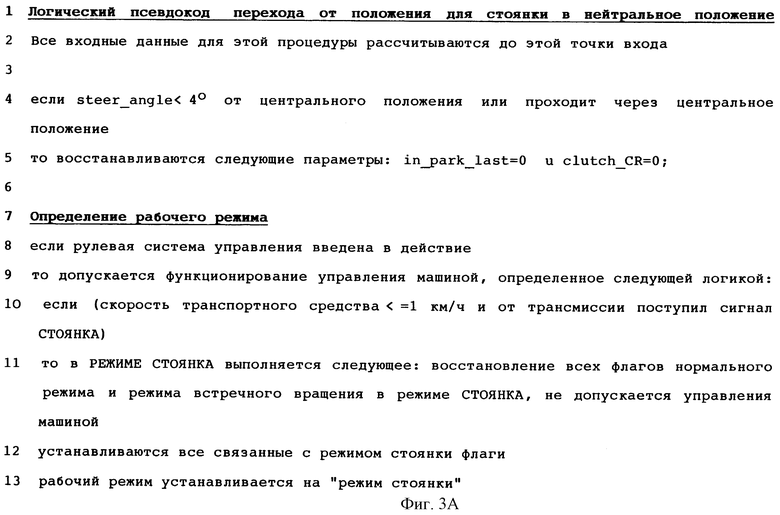
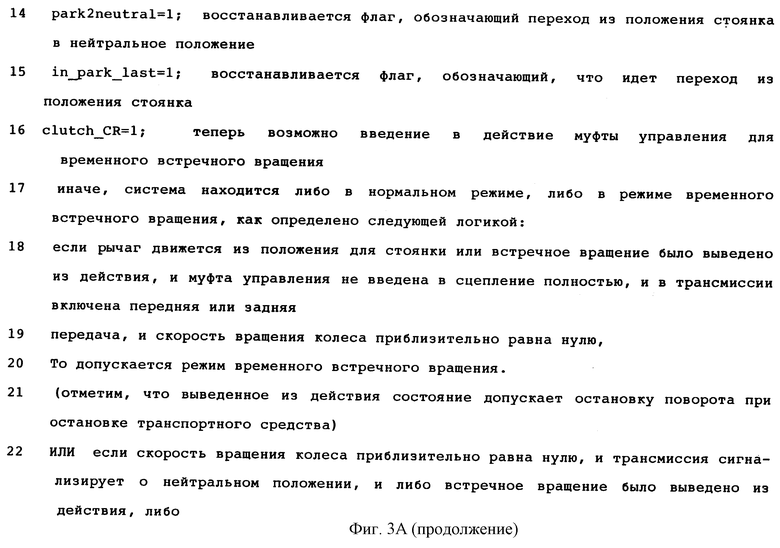
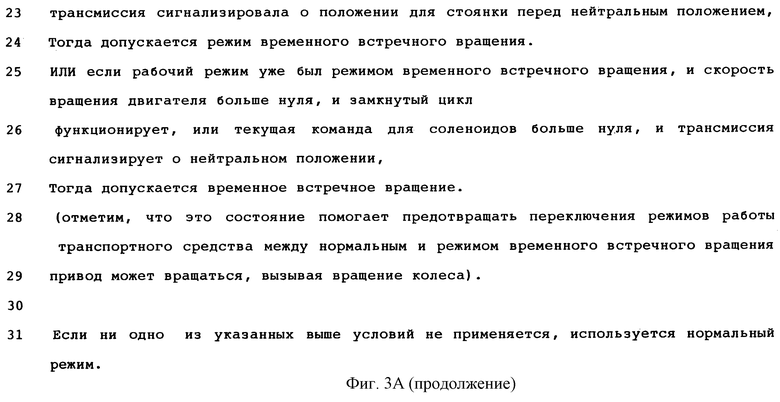
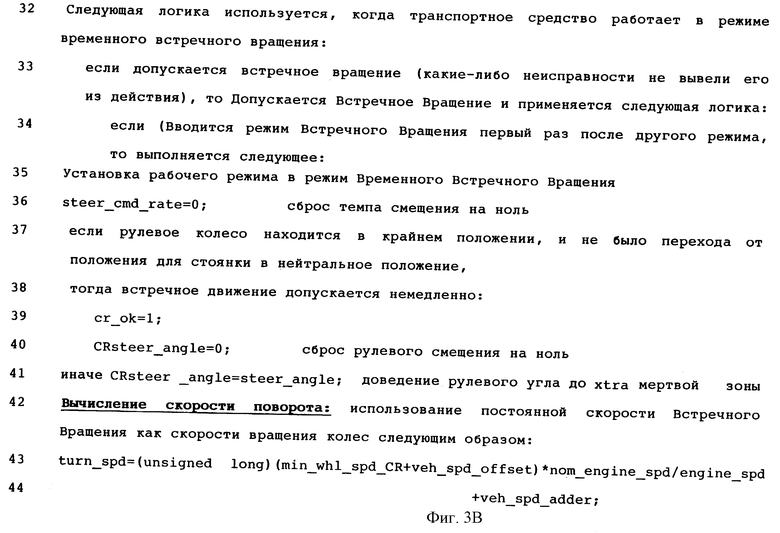
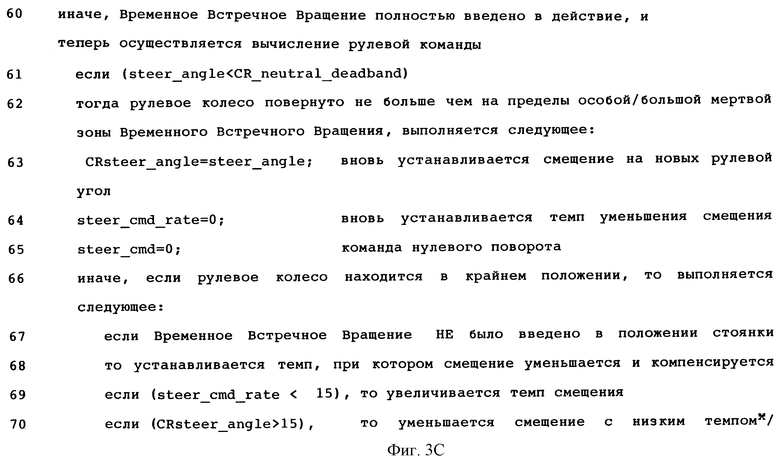
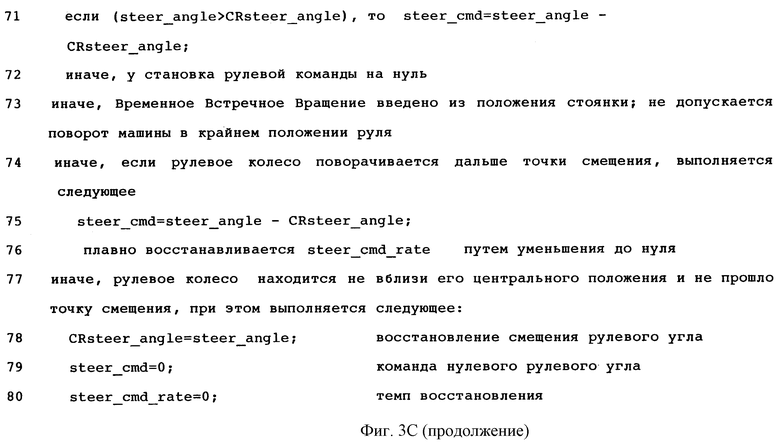
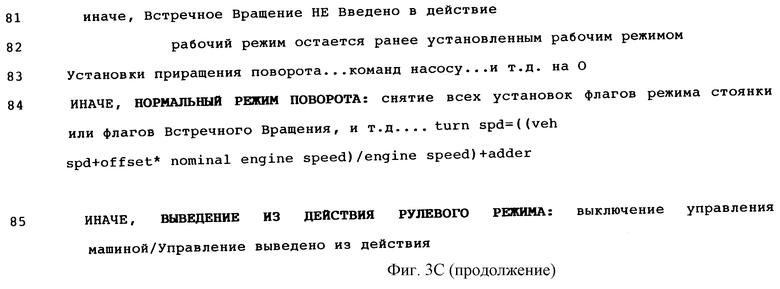
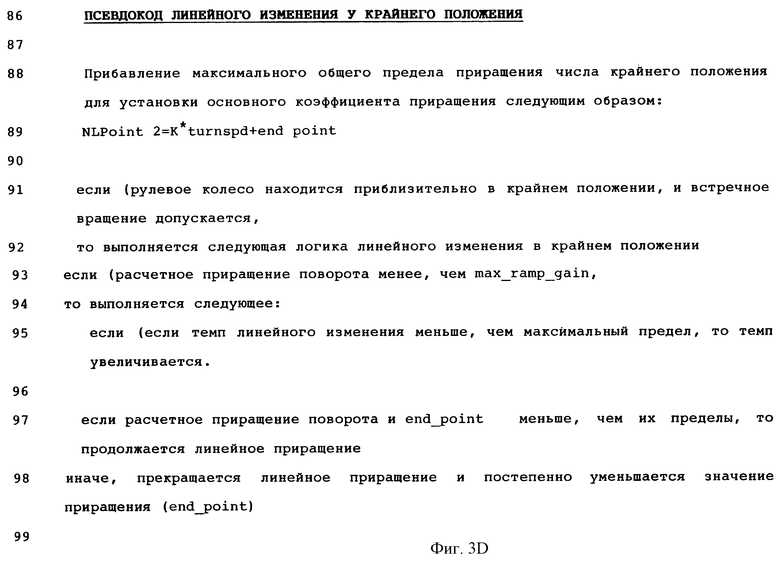
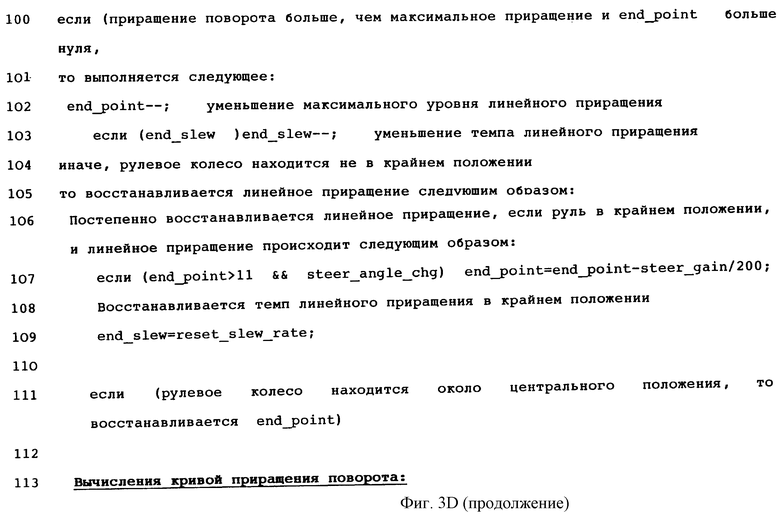
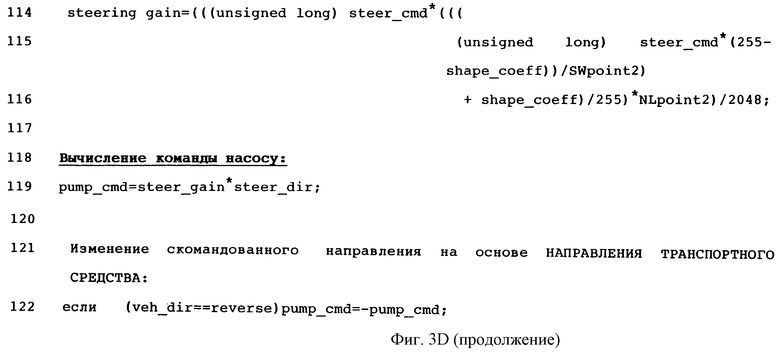
фиг. 3A-3D содержит описание псевдокода алгоритма режима временного встречного вращения, который выполняется микропроцессором системы управления, показанной на фиг.1, когда рычаг переключения передач передвигается из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи при выведенной из сцепления муфте управления. Как показано на фиг.1, последовательный ряд привода гусеничного транспортного средства включает двигатель 10 с выходным валом 12, который приводит в движение прямоугольную зубчатую передачу 14, и трансмиссию 16, такую как трансмиссия, используемая при производстве тракторов Джон Дир 8000 (John Deere 8000). Трансмиссия 16 включает на ее выходном конце освобождаемую пружиной, вводимую в сцепление давлением муфту управления 18, которая управляется педалью 19 муфты управления. Выход трансмиссии приводит в движение через главную или прямоугольную передачу 20 ведущее колесо 22 левой гусеницы посредством левой рулевой планетарной передачи 24 и ведущее колесо 26 правой гусеницы посредством правой рулевой планетарной передачи 28. Рулевые планетарные передачи 24 и 28 - предпочтительно такие, как описанные в Патенте США 5390751, выданном 21 февраля 1995 г. Пуетцу (Puetz) и др. и переданном правоприемнику этой заявки. Дополнительные наружные планетарные передачи (не показаны), применяемые на тракторах Джон Дир 8000, устанавливаются между рулевыми планетарными передачами и соответствующими ведущими колесами, но они не описаны, поскольку не имеют функции рулевого управления, которое является предметом этой заявки. Стояночный тормоз 30 соединен с выходом муфты управления 18, и левый и правый рабочие тормоза 32, 34 соединены с левым и правым ведущими колесами 22, 26 соответственно.
Прямоугольная зубчатая передача 14 приводит в действие насос 40 рулевого управления с изменяемым рабочим объемом, такой как насос серии 90 с рабочим объемом 75 куб. см. , производимый фирмой Сойер-Сандстрэнд (Sauer-Sundstrand). Насос 40, в свою очередь, подает мощность на гидравлический двигатель 42 рулевого управления с фиксированным рабочим объемом, такой как двигатель серии 90 с рабочим объемом 75 куб. см., также производимый фирмой Сойер-Сандстрэнд. Двигатель 42 рулевого управления приводит в действие посредством поперечного вала 44 и шестерни 46 зубчатое колесо 47 с внутренним зацеплением левой планетарной передачи 24, и посредством поперечного вала 44, шестерни 48 и реверсирующей шестерни 50 зубчатое колесо 52 с внутренним зацеплением правой планетарной передачи 24.
Шток (не показан) насоса 40 рулевого управления управляется вспомогательным клапаном, в свою очередь управляемым давлением, или электронным устройством управления смещением (EDC) 60. Электронное устройство управления смещением предпочтительно является известным двухкаскадным устройством с первым каскадом, включающим пластинчатый откидной клапан, и вторым каскадом, включающим ступень усиления насоса, таким как поставляемое фирмой Соейр-Сандстранд с небольшими модификациями каскада для холодной погоды и без функции выполнения работы вручную.
Датчик 62 скорости вращения, такой как коммерчески доступный датчик, установленный вблизи прямоугольного привода 14, выдает сигнал о скорости вращения двигателя в блок рулевой системы (SSU) 64.
Соленоиды клапана 60 управляются командными сигналами насоса (pump_cmd), вырабатываемыми блоком рулевой системы 64.
Рулевое колесо 66 соединено с пружинным средством 67 для установки рулевого колеса в центральное положение и фиксации его крайних положений и с датчиком 68 вращательного положения, таким как вращательный потенциометр, который выдает для блока рулевой системы 64 сигнал угла поворота (steer_angle), представляющий положение рулевого колеса 66 относительно его центрального положения.
Известный узел - рычаг переключения передач/датчик - включает рычаг переключения передач 70, который может передвигаться в нейтральное положение, положение для стоянки и положения для движения вперед и назад, и датчик 71 рычага переключения передач, который вырабатывает сигналы, представляющие положение рычага переключения передач 70, для блока рулевой системы 64. Узел рычаг переключения передач/датчик более подробно описан в Патенте США 5406860, выданном 18 апреля 1995 г. Истону (Easton) и др.
Выключатель 73А контроля введения в сцепление муфты управления является нажимным выключателем, расположенным в трансмиссии 16, и считывает введение в сцепление муфты управления 18.
Нажимной выключатель 73А вырабатывает сигнал введения в сцепление муфты управления для блока рулевой системы 64. Выключатель 73В контроля выведения из сцепления муфты управления, также установленный в трансмиссии и соединенный с педалью 19 муфты управления, вырабатывает сигнал выведения из сцепления муфты управления для блока рулевой системы 64.
Датчик 76 скорости вращения привода, предпочтительно датчик скорости, действие которого основано на разностном эффекте Холла, такой как используемый при производстве тракторов Джон Дир и установленный вблизи главной передачи 20, вырабатывает для блока рулевой системы 64 сигнал скорости вращения главной передачи, скорости транспортного средства или вращения колес (whl_ spd). Магнитное кольцо 78 установлено для вращения с двигателем 42, и датчик 80, действие которого основано на эффекте Холла, установленный вблизи магнитного кольца 78, вырабатывает для блока рулевой системы 64 сигнал скорости вращения двигателя и сигнал направления вращения двигателя.
Как показано на фиг. 2, средство 67 для установки рулевого колеса в центральное положение и фиксации крайних положений поворота руля включает вал 90, вращающийся в неподвижном кожухе 88 и соединенный с рулевым колесом 66. Выступ 92 отступает от вала 90. Кольцо 94 может вращаться на валу 90. Штифт 96 отступает в осевом направлении от кольца 94. Лапка 100 фиксации крайних положений рулевого колеса отступает в радиальном направлении внутрь от кожуха 88. Скручиваемая пружина (не показана) соединена с валом 90 и кожухом 88 так, что вал будет возвращаться в центральное положение. Когда вал 90 вращается по часовой стрелке, выступ 92 будет входить в зацепление со штифтом 96, при этом кольцо 94 будет вращаться с валом 90 до тех пор, пока штифт 96 не войдет в зацепление с лапкой 100 фиксации крайних положений рулевого колеса, при этом дальнейшее вращение предотвращается. Выступ 92, штифт 96 и лапка 100 фиксации крайних положений рулевого колеса предпочтительно имеют такие размеры, что вал 90 и рулевое колесо 66 способны поворачиваться в суммарном угловом диапазоне, составляющем 580o, то есть 290o против часовой стрелки и 290o по часовой стрелке от центрального положения.
Блок рулевой системы 64 включает коммерчески доступный микропроцессор (не показан), который выполняет алгоритм основного контура (не показан), распечатка программы которого содержится в прилагаемой микрофише к ранее упомянутому Патенту США 08/795091, который включен сюда в качестве ссылки. Как показано на фиг. 3А-3D, блок рулевой системы 64 выполняет алгоритм режима временного встречного вращения, когда рычаг переключения передач 70 движется из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи при выведенной из сцепления муфте управления 18. В дальнейшем описании будут делаться ссылки на номера строк распечатки псевдокода, данного на фиг.3А-3D.
Алгоритм, показанный на фиг.3A-3D, не допускает поворота транспортного средства, когда рычаг переключения передач 70 передвигается из положения для стоянки при выведенной из сцепления муфте управления 18 и рулевом элементе 66, находящемся в первом, смешенном от центрального, положении. Алгоритм после недопущения поворота допускает поворот транспортного средства, если рулевой элемент 66 поворачивается в его центральное положение и затем поворачивается от центрального положения. Алгоритм, после недопущения поворота, также допускает поворот транспортного средства как реакцию на вращение рулевого элемента 66 в направлении одного из его крайних положений, во второе, смещенное от центрального, положение.
Алгоритм включает нормальный режим (строка 31), который может вводиться в действие при нормальной работе транспортного средства для выработки рулевого управляющего сигнала таким образом, что темп поворота транспортного средства является первой функцией положения рулевого элемента 66. Алгоритм также включает временный режим (строки 18-30, 32-83, 60-80, 86-111), который может вводиться в действие, когда рулевой элемент 66 находится во втором смещенном положении для выработки рулевого управляющего сигнала таким образом, что темп поворота транспортного средства меньше, чем темп поворота при таком же положении рулевого колеса при нормальной работе. В соответствии со строками 46, 47 и 66-72 временный режим вводится в действие таким образом, что первоначальный временный темп поворота, который имеет место при первоначальном получении возможности поворота транспортного средства, меньше нормального темпа поворота, который имеет место, когда рулевое колесо 66 находится в таком же положении при нормальной работе.
Если, при действии временного режима, рулевое колесо 66 удерживается в его крайнем положении, в соответствии со строками 88-111 темп поворота транспортного средства постепенно возрастает. В результате работы в соответствии со строками 84, 89 и 114 темп поворота при временном режиме возрастает с темпом приращения, который пропорционален соотношению скорости вращения привода и скорости вращения двигателя. В соответствии со строками 74-76 и 114 работа строится так, что если рулевое колесо 66 вращается от его крайнего положения, нарастание темпа поворота транспортного средства прекратится, и результирующая величина прироста поворота применяется как новый прирост поворота. В соответствии со строками 74-76 работа строится так, что темп поворота постепенно возвращается к темпу, имеющему место при нормальной работе, когда рулевой элемент 66 возвращается к его центральному положению. В соответствии со строкой 43 работа строится так, что, когда транспортное средство неподвижно, темп поворота транспортного средства возрастает с темпом прироста, который пропорционален соотношению константы и скорости вращения двигателя.
Часть изложения этого патентного документа содержит материал, который является предметом заявки на защиту авторских прав. Обладатель авторского права не имеет возражений против того, чтобы кто-либо воспроизвел копию патентного документа или описания патента, когда он появится в патентной картотеке Ведомства патентов и товарных знаков, но в других отношениях сохраняет за собой все какие бы то ни было права.
Хотя настоящее изобретение было описано в связи с конкретным вариантом его воплощения, нужно понимать, что много альтернативных вариантов, модификаций и вариаций будут очевидны для специалиста в данной области техники в свете предшествующего описания. Соответственно, подразумевается, что это изобретение охватывает все такие альтернативные варианты, модификации и вариации, которые соответствуют сущности и рамкам прилагаемой формулы изобретения.

Изобретение относится к системе рулевого управления для гусеничного транспортного средства. Система рулевого управления гусеничного транспортного средства включает датчик выведения из сцепления муфты управления для выработки сигналов выведения из сцепления, когда муфта управления выведена из сцепления; датчик рычага переключения передач для выработки сигналов положения рычага переключения передач, представляющих положение рычага переключения передачи, и датчик вращательного положения, соединенный с рулевым элементом и вырабатывающий сигнал положения рулевого элемента, представляющий положение рулевого элемента. Техническим результатом данного изобретения является создание системы рулевого управления, которая выводит из действия рулевое управление или встречное вращение при движении рычага переключения передач из положения для стоянки в нейтральное положение или из положения для стоянки в нейтральное положение для включения передачи независимо от положения рулевого колеса. Исключение рулевого управления или встречного вращения позволяет водителю восстанавливать способность управления или встречного вращения без необходимости восстановления центрального положения рулевого колеса. 9 з.п. ф-лы, 3 ил.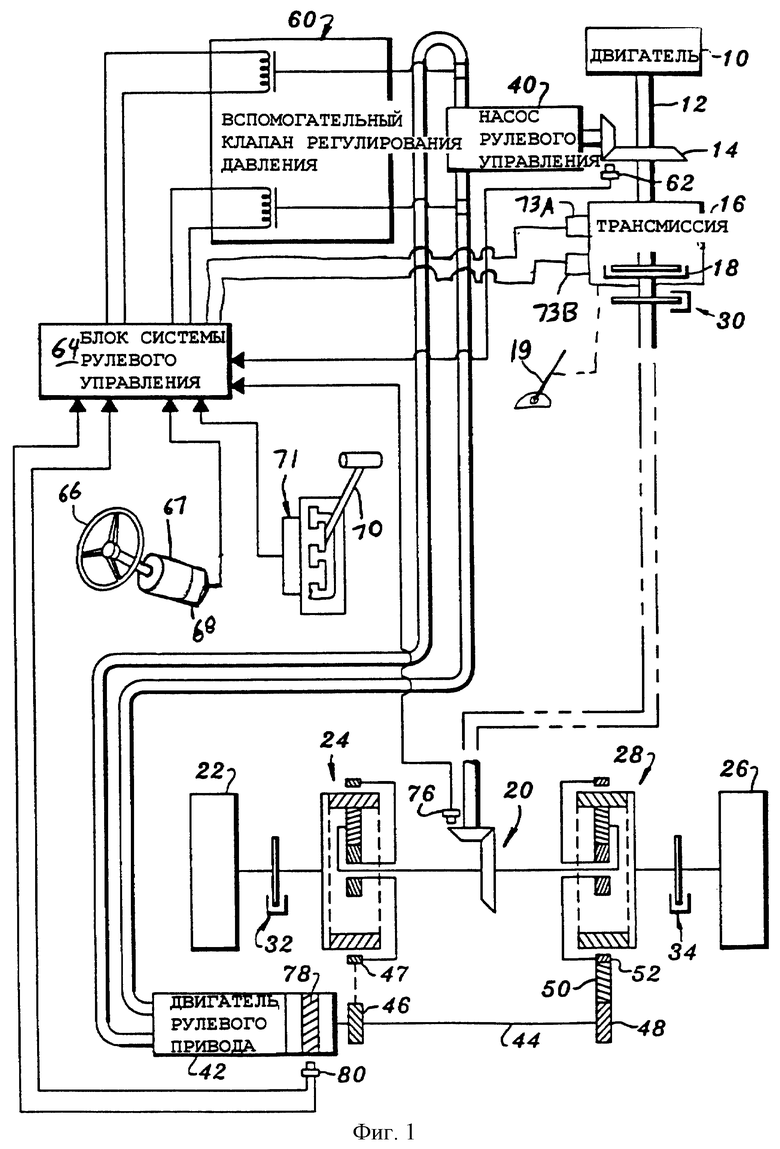
| СИСТЕМА УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2026226C1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ЯЗЫК С СОУСОМ ИЗ ЗЕЛЕНОГО ГОРОШКА" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2332026C1 |
| US 4023637 А, 17.05.1977 | |||
| US 3874468 A, 01.04.1975 | |||
| СПЛАВ ДЛЯ РАСКИСЛЕНИЯ И ЛЕГИРОВАНИЯ СТАЛИ | 0 |
|
SU387020A1 |
| БЕЛКОВЫЙ ПРОДУКТ И СПОСОБ ПОЛУЧЕНИЯ ИНЪЕКЦИОННОГО БЕЛКОВОГО ПРОДУКТА | 2010 |
|
RU2548994C2 |
| Упаковка | 1988 |
|
SU1755708A3 |

