Изобретение относится к системе привода/рулевого управления гусеничного транспортного средства.
Известные выпускаемые в промышленных масштабах гусеничные транспортные средства, такие как гусеничные тракторы “John Deere” моделей 8000Т и 9000Т, содержат гидростатическую систему рулевого управления, включающую в себя насос гидравлического усилителя рулевого управления с приводом от двигателя с переменной производительностью, который приводит в действие гидромотор рулевого управления с постоянной производительностью. Мотор рулевого управления приводит в действие через посредство коленчатого вала и зубчатой передачи левую планетарную передачу. Мотор рулевого управления также приводит в действие через посредство коленчатого вала, зубчатой передачи и шестерни заднего хода правую планетарную передачу. Сигнал контроля рулевого управления обеспечивают преобразователем, который обнаруживает вращение рулевого колеса. Средство управления производительностью насоса управляет мощностью насоса как функцией сигналов, контролирующих рулевое управление. Скорость и направление вращения мотора рулевого управления обычно пропорциональны положению рулевого колеса, и эти параметры определяют датчиком скорости и направления вращения мотора, работающим по принципу эффекта Холла. Выходным параметром системы рулевого управления является скорость мотора, которую измеряют с помощью датчика скорости и направления вращения мотора, работающего по принципу эффекта Холла. Желательно обеспечить средство обнаружения неисправностей насоса и реагирования на них, когда выходной поток насоса превышает величину, которая соответствует сигналу контроля рулевого управления, и величину, определяемую командой от средства управления производительностью насоса.
Соответственно, задача данного изобретения заключается в обеспечении системы или способа обнаружения определенных отказов в системе привода/рулевого управления гусеничного средства.
Еще одним объектом данного изобретения является обеспечение системы, обнаруживающей превышение выходным потоком насоса гидравлического усилителя рулевого управления величины, которая соответствует сигналу контроля рулевого управления.
Эти и прочие задачи обеспечиваются данным изобретением, согласно которому обеспечивают систему управления для системы привода/рулевого управления гусеничного транспортного средства, имеющей приводимый в действие двигателем насос гидравлического усилителя рулевого управления, который приводит в действие гидромотор рулевого управления. Выходной поток насоса измеряют по скорости мотора рулевого управления. Насос гидравлического усилителя рулевого управления реагирует на сигналы контроля рулевого управления, характеризующие состояние рулевого колеса, манипулируемого оператором. Мотор рулевого управления обеспечивает входящие воздействия на механизм дифференциальной передачи гусеницы, который реагирует на манипулирование рулевым колесом и приводит в действие левую и правую гусеницы для поворота транспортного средства. Система управления содержит блок управления, который принимает сигналы от датчика скорости двигателя, датчика скорости и направления вращения мотора рулевого управления, и сигналы контроля рулевого управления. Блок управления вычисляет пороговое значение скорости мотора как функцию определяемых сигналов скорости двигателя и сигналов контроля рулевого управления; и формирует сигнал неисправности как функцию соотношения между сигналом скорости мотора рулевого управления и пороговым значением скорости мотора. Блок управления формирует сигнал неисправности вследствие завышенного числа оборотов, если сигнал скорости мотора рулевого управления превышает пороговое значение скорости мотора, и формирует сигнал неисправности вследствие конфликта данных, если сигнал скорости мотора рулевого управления меньше отрицательного минимального порогового значения скорости мотора. Когда сигналы контроля рулевого управления, не дают транспортному средству команду поворота, блок управления формирует минимальное пороговое значение и формирует сигнал неисправности вследствие завышенного числа оборотов, если сигнал скорости мотора превышает минимальное пороговое значение, или он меньше отрицательного минимального порогового значения.
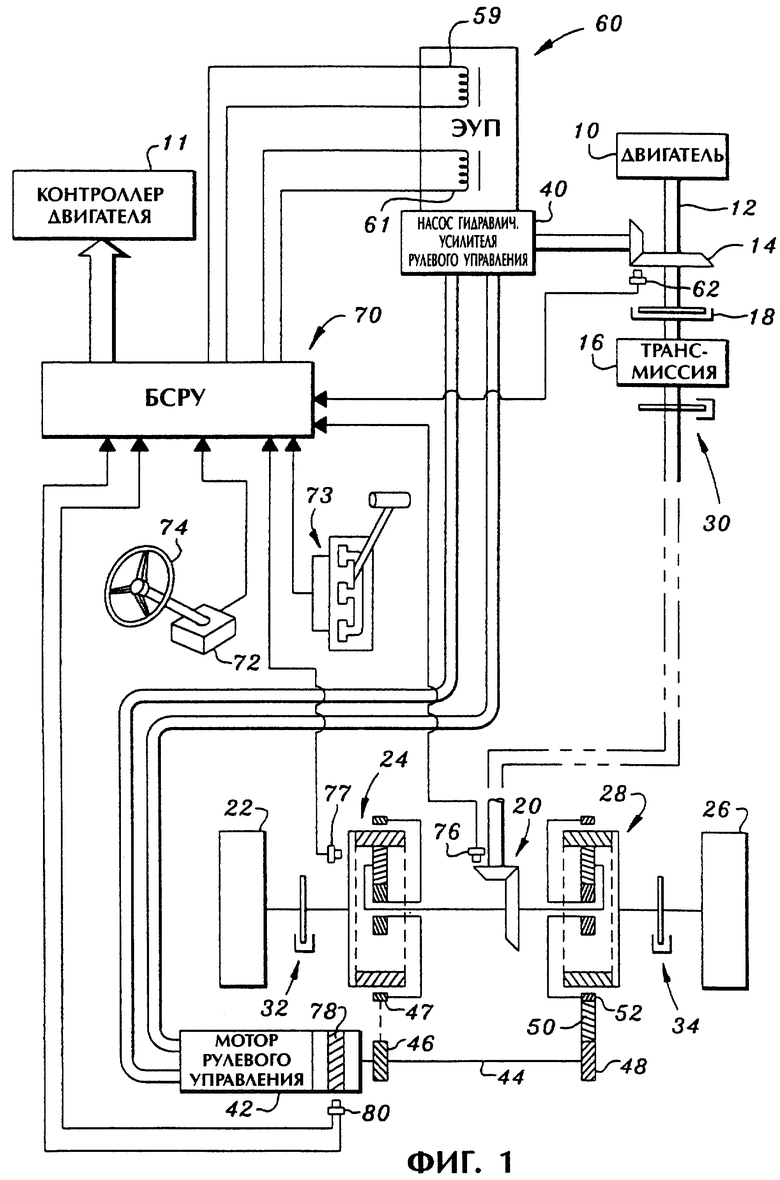
Фиг.1 - упрощенная схема привода гусеничного транспортного средства и системы управления в соответствии с данным изобретением; и
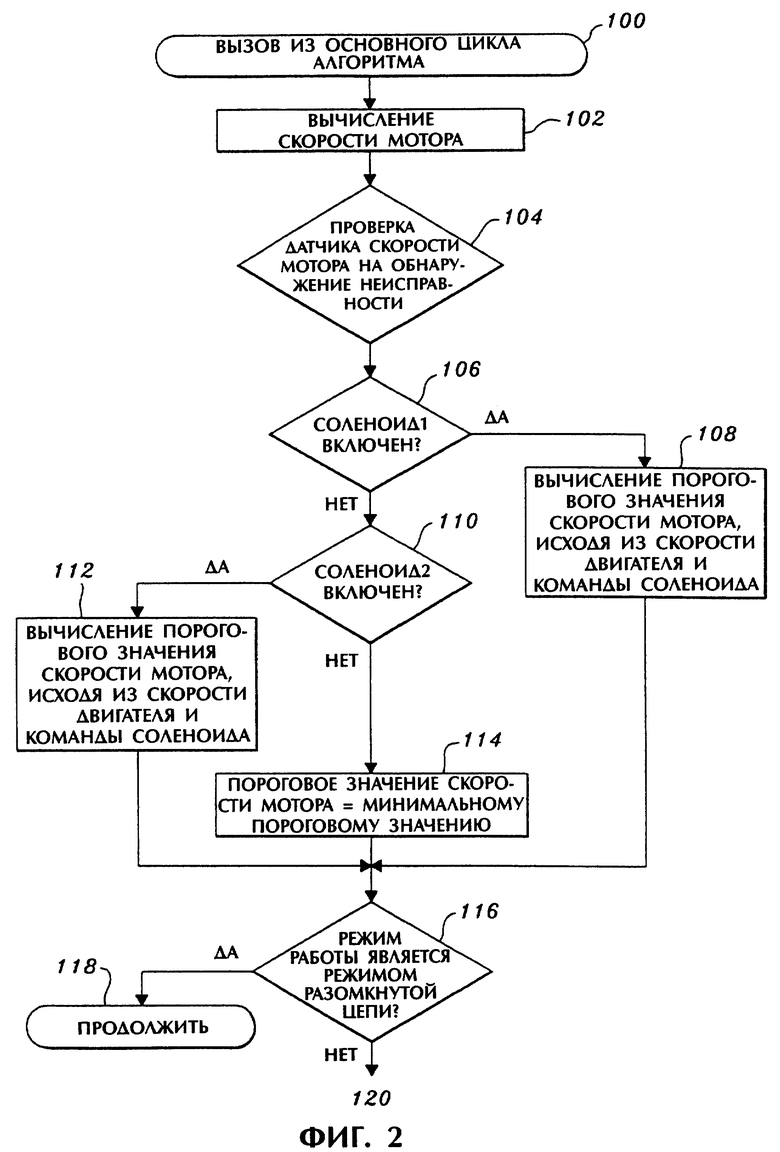
фиг.2-5 - логическая блок-схема алгоритма, выполняемого микропроцессорным блоком управления системы управления, изображаемой на фиг.1.
На фиг.1: двигатель 10 гусеничного транспортного средства имеет выходной вал 12, который приводит в действие коническую зубчатую передачу 14 и трансмиссию 16 через сцепление 18. Двигателем 10 управляет электронный блок 11 управления двигателем. Трансмиссия 16 приводит в действие главную, или коническую, передачу 20, которая приводит в действие ведущее колесо 22 левой гусеницы через левую планетарную передачу 24 рулевого управления, и ведущее колесо 26 правой гусеницы через правую планетарную передачу 28 рулевого управления. Планетарные передачи 24 и 28 рулевого управления предпочтительно являются передачами, описываемыми в патенте США №5390751, выданном 21 февраля 1995, Пютц и др., и права на который переданы правопреемнику данной заявки. Дополнительные наружные планетарные механизмы (не изображены), подобные механизмам на тракторах “John Deere 8000Т”, установлены между планетарными механизмами поворота и соответствующими ведущими колесами, и далее не описываются, так как они не имеют непосредственного отношения к предмету данной заявки. Стояночный тормоз 30 соединен с выходным валом трансмиссии 16, а левый и правый рабочие тормоза 32, 34 соединены с левым и правым ведущими колесами 22, 26, соответственно.
Коническая зубчатая передача 14 приводит в действие насос 40 гидравлического усилителя рулевого управления с переменной производительностью, например, насос объемом 75 куб.см, модель 90, компании Sauer-Sundstrand. Насос 40, в свою очередь, приводит в действие гидромотор 42 рулевого управления с постоянной производительностью: например, насос объемом 75 куб.см, модель 90, также компании Sauer-Sundstrand. Мотор 42 рулевого управления приводит в действие через коленчатый вал 44 и зубчатую передачу 46 коронную шестерню 47 левой планетарной передачи 24 и - через коленчатый вал 44, зубчатую передачу 48 и шестерню заднего хода 50 - коронную шестерню 52 правой планетарной передачи 28.
Насос 40 гидравлического усилителя рулевого управления имеет качающуюся шайбу (не изображена), положением которой управляет регулирующий клапан качающейся шайбы, или электронное средство 60 управления производительностью (ЭУП). ЭУП предпочтительно является двухступенчатым устройством, в котором первая ступень содержит откидной клапан, работающий от пары соленоидов 59, 61, а вторая ступень содержит форсирующую ступень для насоса как, например, ступень, используемую в гусеничном тракторе модели 8000Т, выпускаемом компанией “John Deere”.
Датчик 62 скорости вращения, например выпускаемый промышленностью магнитный измерительный преобразователь, устанавливаемый вблизи конического привода 14, направляет сигнал скорости двигателя в блок системы рулевого управления (БСРУ) 70. Соленоидами 59, 61 клапана 60 управляют за счет командных сигналов для насоса (pump_cmd), формируемых с помощью БСРУ 70. БСРУ 70 осуществляет связь с блоком 11 управления двигателем.
Преобразователь 72 положения поворота рулевого колеса, такой как поворотный переменный резистор, направляет в БСРУ 70 сигнал угла рулевого управления (steer_angle), характеризующий положение относительно центрированного положения рулевого колеса 74, управляемого оператором и центрируемого за счет пружины. Данное описание относится к устройству ввода рулевого управления с нейтральным положением, центрируемым за счет пружины. Данное изобретение также можно применять для нецентрируемого устройства ввода рулевого управления. БСРУ 70 также принимает сигналы от преобразователя 73 рычага переключения передач, описываемого, например, в патенте США 5406860, выданном 18 апреля 1995, Истон и др.
Датчик 76 скорости вращения карданной передачи, предпочтительно, дифференциальный датчик скорости, работающий по принципу эффекта Холла, например, применяемый в тракторах 8000Т, выпускаемых компанией “John Deere”, установлен вблизи главной передачи 20 и направляет в БСРУ 70 сигнал скорости главной передачи, скорости колеса или самого транспортного средства. Датчик 77 температуры масла для гидравлических систем, такой, который применяют в тракторах 8000Т компании “John Deere”, направляет в БСРУ 70 сигнал температуры масла для гидравлических систем. Магнитное кольцо 78 установлено для вращения его мотором 42, а работающий по принципу эффекта Холла преобразователь 80, установленный вблизи магнитного кольца 78, направляет в БСРУ 70 сигнал скорости мотора, и сигнал направления вращения мотора.
БСРУ 70 содержит выпускаемый промышленностью микропроцессор (не изображен), который выполняет подпрограмму или алгоритм, изображенный в фиг.2-5. Этот алгоритм предполагает, что устройство 72 ввода рулевого управления и датчик 80 скорости и направления вращения мотора являются полностью исправными. Сигнал от устройства 72 ввода рулевого управления преобразуют в значение команды соленоида. Команда соленоида 1 характеризует правый поворот устройства ввода рулевого управления, когда транспортное средство находится в нейтральной передаче/направлении или передаче/направлении переднего хода, или левый поворот - в передаче/направлении заднего хода. Команда соленоида 2 характеризует левый поворот устройства ввода рулевого управления, когда транспортное средство находится в нейтральной передаче/направлении или передаче/направлении переднего хода, или правый поворот - в передаче/направлении заднего хода.
Этот алгоритм зависит от верного значения скорости мотора и также от направления вращения мотора, поэтому, если обнаруживают, что эти значения ненадежны (не являются полностью функциональными, либо неверны вследствие разомкнутой цепи или короткого замыкания), тогда этот алгоритм/логика более не применяются. Если определено, что датчик 80 скорости мотора неисправен, тогда БСРУ устанавливает переменную величину open-loop (разомкнутая цепь) как истинную. Эту переменную величину используют для прекращения применения алгоритма в случае неисправности датчика скорости мотора.
Операцию 100 начинают выполнять при ее вызове основным циклом алгоритма (не изображен), например, выполняемым с помощью БСРУ трактора “8000Т”. В операции 102 вычисляют значение скорости мотора, поступившее от датчика 80 скорости. В операции 104 проверяют датчик скорости мотора на предмет наличия неисправностей. Операция 106 передает алгоритм в операцию 108, если соленоид 1 включен; в ином случае - в операцию 110. Операция 108 вычисляет пороговое значение скорости мотора, и затем процесс управления переходит в операцию 116. Пороговое значение скорости мотора является максимальным допустимым значением скорости мотора, которое не должно быть превышено нормально функционирующим насосом и гидростатической системой мотора при нормальных условиях эксплуатации. Пороговое значение скорости мотора вычисляют исходя из имеющейся в данный момент скорости двигателя, имеющейся в данный момент команды соленоида и постоянного минимального порогового значения скорости мотора (минимальное пороговое значение). Отдельное пороговое значение скорости мотора вычисляют для команды соленоида 1 и соленоида 2.
Операция 110 передает алгоритм в операцию 112, если включен соленоид 2; в ином случае - в операцию 114. Операция 112 вычисляет пороговое значение скорости мотора указанным выше образом, и затем после нее процесс управления переходит в операцию 116.
Операция 114 устанавливает пороговое значение скорости мотора, равным минимальному пороговому значению (если ни тот, ни другой соленоид не включены).
Операция 116 осуществляет выход из этой подпрограммы, посредством операции 118, если действует режим разомкнутой цепи; в ином случае алгоритм переходит в операцию 120.
Операция 120 осуществляет выход из этой подпрограммы посредством операции 122, если температура масла для гидравлических систем ниже 20°С; в ином случае алгоритм переходит в операцию 124.
Операция 124 осуществляет выход из этой подпрограммы посредством операции 126, если в данное время осуществляют калибровку; в ином случае алгоритм переходит в операцию 128.
Таким образом, в результате операций 116-124 алгоритм проверяет наличие следующих условий и начинает работать только при их соблюдении:
если система рулевого управления не действует в режиме разомкнутой цепи (т.е. она действует в замкнутой цепи; датчик скорости и направления вращения мотора действует исправно, без каких-либо известных обнаруживаемых неисправностей);
температура масла для гидравлических систем составляет более 20°С (низкая температура масла в исправном насосе вызовет чрезмерное запаздывание срабатывания насоса. Для исключения установления переменной задержки, и во избежание формирования ложной сигнализации: действие алгоритма прекращают, если температура масла ниже определенной температуры масла);
и трактор не находится в режиме калибровки (работу алгоритма прекращают, если трактор в данное время проходит калибровку).
Операция 128 передает алгоритм в операцию 130, если соленоид 1 включен; в ином случае алгоритм переходит в операцию 138. Операция 130 передает алгоритм в операцию 132, если скорость мотора выше порогового значения скорости мотора; в ином случае алгоритм переходит в операцию 134. Операция 132 устанавливает флаг неисправности вследствие завышенного числа оборотов, и направляет алгоритм в операцию 156. Операция 134 передает алгоритм в операцию 136, если скорость мотора ниже отрицательного минимального порогового значения скорости мотора; в ином случае алгоритм переходит в операцию 138. Операция 136 устанавливает флаг конфликта данных направления, и передает алгоритм в операцию 156. Поэтому в результате операций 128-136: если соленоид 1 включен (то есть, трактор находится либо в нейтральной передаче или передаче переднего хода и выполняет правый поворот, либо находится в передаче заднего хода и выполняет левый поворот), тогда, если скорость мотора превышает пороговое значение скорости мотора, устанавливают флаг неисправности вследствие завышенного числа оборотов (БСРУ 152), либо - если скорость мотора меньше отрицательного минимального порогового значения, тогда устанавливают флаг конфликта данных направления (БСРУ 154).
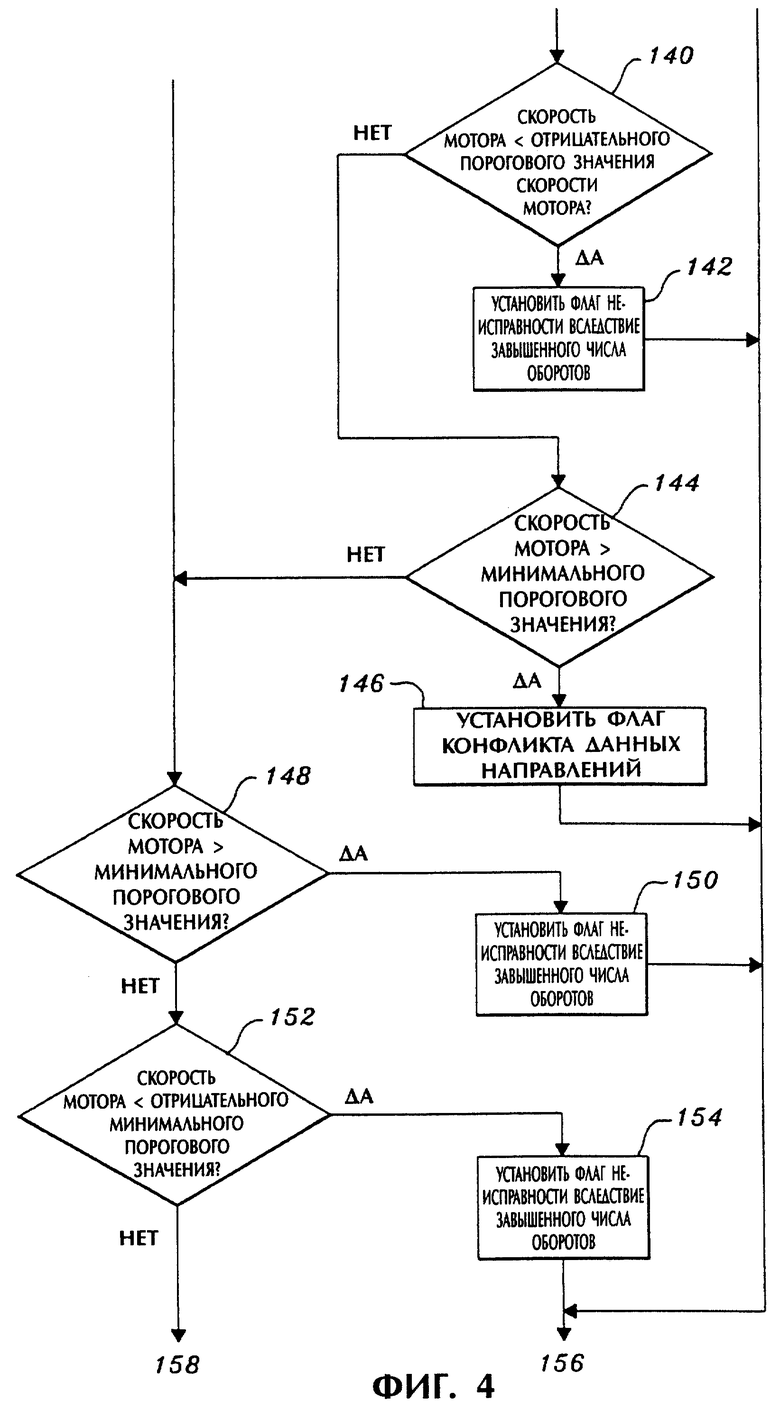
Операция 138 передает алгоритм в операцию 140, если включен соленоид 2; в ином случае алгоритм переходит в операцию 148. Операция 140 передает алгоритм в операцию 142, если скорость мотора меньше отрицательного порогового значения скорости мотора; в ином случае алгоритм переходит в операцию 144. Операция 142 устанавливает флаг неисправности вследствие завышенного числа оборотов и передает алгоритм в операцию 156. Операция 144 передает алгоритм в операцию 146, если скорость мотора выше минимального порогового значения скорости мотора; в ином случае алгоритм переходит в операцию 148. Операция 146 устанавливает флаг конфликта данных направления, и передает алгоритм в операцию 156.
Таким образом, в операциях 138-146: если соленоид 2 включен (то есть, трактор находится в нейтральной передаче или передаче переднего хода и выполняет левый поворот, либо находится в передаче заднего хода и выполняет правый поворот), тогда, если скорость мотора меньше отрицательного порогового значения скорости мотора устанавливают флаг неисправности вследствие завышенного числа оборотов (БСРУ 152), либо если скорость мотора выше минимального порогового значения, тогда устанавливают флаг конфликта данных направления (БСРУ 154).
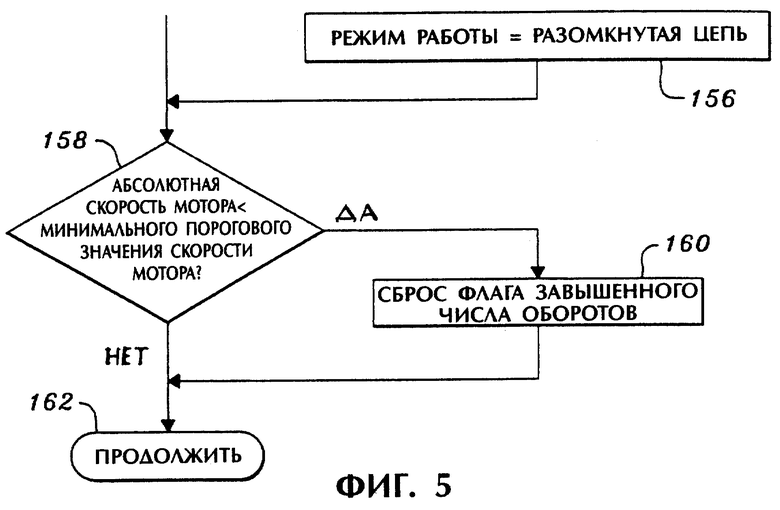
Операция 148 передает алгоритм в операцию 150, если скорость мотора выше минимального порогового значения; в ином случае алгоритм переходит в операцию 152. Операция 150 устанавливает флаг неисправности вследствие завышенного числа оборотов и передает алгоритм в операцию 156. Операция 152 передает алгоритм в операцию 154, если скорость мотора меньше отрицательного минимального порогового значения; в ином случае алгоритм переходит в операцию 158. Операция 154 устанавливает флаг неисправности вследствие завышенного числа оборотов и передает алгоритм в операцию 156. Операция 156 устанавливает режим работы как режим разомкнутой цепи, и передает алгоритм в операцию 158. Таким образом, в операциях 148-156, если скорость мотора выше минимального порогового значения, или если скорость мотора меньше отрицательного минимального порогового значения, тогда устанавливают флаг неисправности вследствие завышенного числа оборотов (БСРУ 152), и режим работы устанавливают как режим Разомкнутой Цепи.
Операция 158 передает алгоритм в операцию 160, если абсолютная скорость мотора меньше порогового значения скорости мотора; в ином случае действие алгоритма прекращают в операции 162. Операция 160 сбрасывает флаг неисправности вследствие завышенного числа оборотов и прекращает действие алгоритма посредством операции 162.
Хотя данное изобретение описывается относительно конкретного варианта его реализации, подразумевается, что в свете приводимого выше описания для специалистов данной области техники будут очевидными многие варианты, модификации и изменения. Соответственно, данное изобретение включает в себя все такие варианты, модификации и изменения, которые находятся в рамках прилагаемой формулы изобретения.

Изобретение относится к системам привода рулевого управления. Сущность изобретения заключается в том, что система управления содержит приводимый в действие двигателем насос гидравлического усилителя рулевого управления, который приводит в действие гидромотор рулевого управления. Насос гидравлического усилителя рулевого управления реагирует на сигналы контроля рулевого управления, характеризующие состояние рулевого колеса, которым манипулирует оператор. Гидромотор рулевого управления обеспечивает входящее воздействие на механизм дифференциальной передачи гусеницы, который реагирует на манипулирование рулевым колесом и приводит в действие левую и правую гусеницы для поворота транспортного средства. Технический результат заключается в обеспечении системы обнаружения некоторых видов отказа в системе привода рулевого управления, а также в обнаружении превышения выходным потоком насоса гидравлического усилителя рулевого управления величины, которая соответствует сигналу контроля рулевого управления, 5 з.п. ф-лы, 5 ил.
| СИСТЕМА УПРАВЛЕНИЯ ГУСЕНИЧНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 1992 |
|
RU2026226C1 |
| US 5921335 А, 13.07.1999 | |||
| US 5611405 А, 18.02.1997 | |||
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ЯЗЫК С СОУСОМ ИЗ ЗЕЛЕНОГО ГОРОШКА" СПЕЦИАЛЬНОГО НАЗНАЧЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2332026C1 |

