Изобретение относится к области авиационной техники и касается способа определения дисбаланса несущих винтов вертолета.
Известен способ определения дисбаланса несущего винта вертолета, заключающийся в измерении величины и фазы вибраций фюзеляжа вертолета, от дисбаланса и пробного дисбаланса винта, вычисления дисбаланса винта. Для определения дисбаланса используются показания вертикальных вибродатчиков (см. патент США 3945256; 1976 г. - прототип).
При таком способе сигнал от весового дисбаланса на несущем винте формируется с помощью разности показаний вертикальных вибродатчиков, установленных с двух сторон от оси вала винта на одинаковом расстоянии от нее. Если центр масс вертолета расположен со смещением по отношению к оси вала, то сигнал от весового дисбаланса формируется с погрешностью, что снижает точность определения дисбаланса несущего винта. У вертолетов с двумя несущими винтами, расположенными на фюзеляже на различной высоте (соосная и продольная схема вертолетов), в общем случае дисбалансы могут иметь место одновременно на каждом из двух винтов. В таком случае данный способ не позволяет определить дисбаланс каждого из двух несущих винтов.
Задача, решаемая в заявляемом техническом решении, заключается в определении дисбаланса несущих винтов вертолета при осуществлении технического результата - определении дисбалансов каждого из двух несущих винтов вертолета.
Существенными признаками заявляемого способа определения дисбаланса несущих винтов вертолета, общими с прототипом, являются измерение величины вибраций фюзеляжа вертолета от дисбаланса и пробного дисбаланса винта, вычисление дисбаланса винта.
Признаками отличными от прототипа, являются следующие.
На одном из несущих винтов, преимущественно на верхнем, при угловом положении Ψ одной и той же лопасти невращающегося несущего винта относительно продольной плоскости симметрии вертолета, устанавливают поочередно один продольный пробный дисбаланс ΔSx в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и расположенной в продольной плоскости симметрии вертолета, другой поперечный пробный дисбаланс ΔSz устанавливают в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и перпендикулярной продольной плоскости симметрии вертолета, измеряют амплитуды вибраций фюзеляжа вертолета, за измеряемые параметры принимают квадраты амплитуд угловых колебаний ϕ фюзеляжа вертолета относительно одной оси вертолета, преимущественно продольной, и квадраты амплитуд линейных колебаний z0 фюзеляжа в центре масс вертолета по направлению другой оси вертолета, соответственно поперечной, а дисбалансы продольные верхнего Sx в, нижнего Sx н несущих винтов и поперечные верхнего Sz в, нижнего Sz н несущих винтов вычисляют по математическим выражениям: пробные дисбалансы установлены на верхнем несущем винте вертолета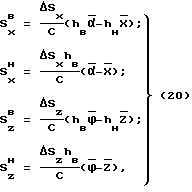
пробные дисбалансы установлены на нижнем несущем винте вертолета

ZВ,j - амплитуда линейных поперечных перемещений фюзеляжа вертолета, замеренная вибродатчиком, установленным выше центра масс вертолета на расстоянии a;
ZН,j - амплитуда линейных поперечных перемещений фюзеляжа, вертолета, замеренная вибродатчиком, установленным ниже центра масс вертолета на расстоянии l;
b=a+l;
hВ - расстояние от центра масс до верхнего несущего винта вертолета;
hН - расстояние от центра масс до нижнего несущего винта вертолета;
с=hB-hН;
ϕs; ZO,S; ZB,S; ZH,S - амплитуды перемещений фюзеляжа вертолета от дисбалансов двух винтов (23);
ϕx; ZO,X; ZB,X; ZH,X - амплитуды перемещений фюзеляжа вертолета от продольного дополнительного дисбаланса ΔSX в первом положении (24);
ϕ-x; ZO,-X; ZB,-X; ZH,-X - амплитуды перемещений фюзеляжа вертолета от продольного дополнительного дисбаланса -ΔSX во втором положении с диаметрально противоположным направлением (25);
ϕz/ ZO,Z; ZB,Z; ZH,Z - амплитуды перемещений фюзеляжа вертолета от поперечного дополнительного дисбаланса ΔSZ в первом положении (26);
ϕ-z; ZO,-Z; ZB,-Z; ZH,-Z - амплитуды перемещений фюзеляжа вертолета от поперечного дополнительного дисбаланса -ΔSZ во втором положении с диаметрально противоположным направлением (27).
Совокупность признаков заявляемого изобретения, отличная от прототипа, является необходимой и достаточной для обеспечения технического результата.
Технический результат - определение дисбалансов каждого из двух несущих винтов вертолета реализуется при осуществлении совокупности существенных признаков заявляемого изобретения, причинно-следственная связь между которыми следует из результатов решения дифференциальных уравнений движения (28), представленных математическими выражениями (20), (21): (22).
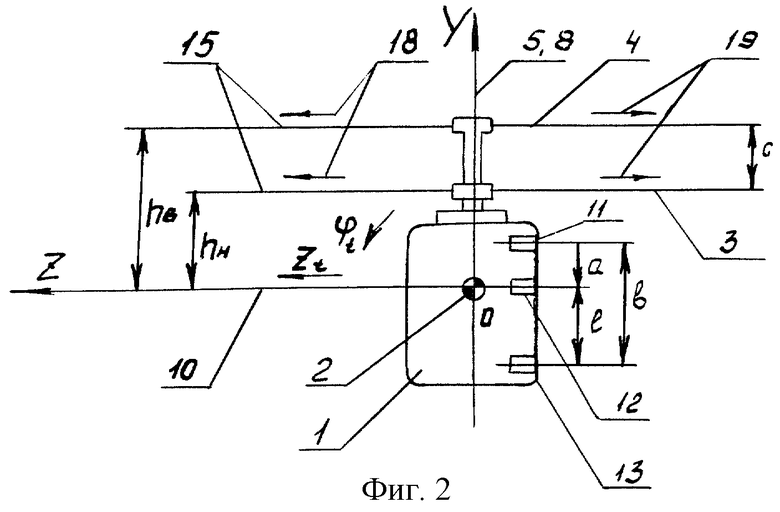
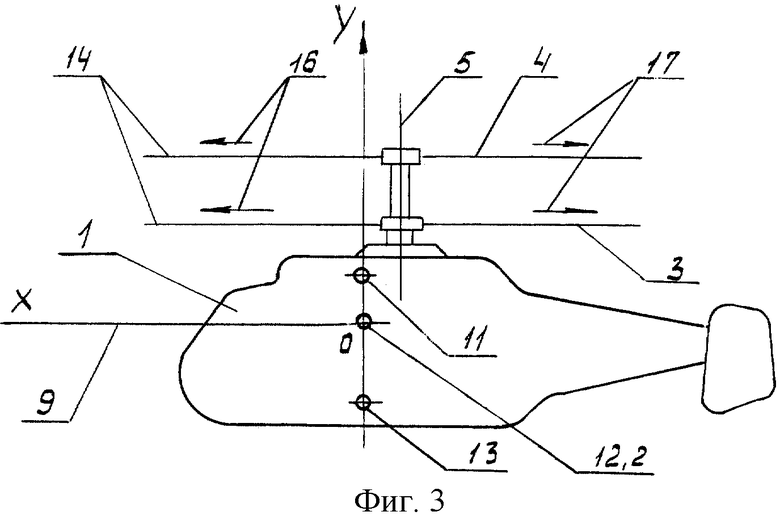
На фиг.1 представлен вид сверху на вертолет. Поперечное сечение вертолета при виде cпереди, показано на фиг.2. Вид на вертолет сбоку, слева показан на фиг.3.
На фюзеляже 1 вертолета с центром масс 2 закреплены нижний 3 и верхний 4 несущие винты. Оси вращения винтов обоз0начены позицией 5. На фиг.1, 2, 3 показан соосный вертолет, поэтому оси нижнего и верхнего винтов совпали. У продольного вертолета оси нижнего и верхнего винтов разнесены по длине фюзеляжа и не совпадают.
Для заявляемого способа определения дисбаланса несущих винтов, закрепленных на фюзеляже на различной высоте, их размещение по длине фюзеляжа не имеет значения. Ось 7 лопасти 6 невращающегося несущего винта расположена под углом ψ с продольной плоскостью симметрии 8 вертолета.
На фигурах показана система координат OХYZ, связанная с вертолетом с началом в центре масс 2. Ось OY параллельна оси 5. Продольная ось 9 вертолета находится в продольной плоскости симметрии 8 вертолета и совпадает с осью OX; поперечная ось 10 вертолета совпадает с осью OZ. Оси чувствительности вибродатчиков 11, 12 и 13 лежат в плоскости YOZ, в которой находится и центр масс 2, а ось чувствительности вибродатчика 12 проходит через центр масс 2. Амплитуды перемещений фюзеляжа по вибродатчикам 11 и 13 обозначены соответственно ZB и Zн, а по вибродатчику 12 - Zo. Перемещения вертолета по оси OZ обозначены Zt, угловые перемещения вокруг оси ОX - ϕt. Расстояния от центра масс 2 до нижнего 3 и верхнего 4 винтов обозначены соответственно hН и hВ, расстояние между винтами 3 и 4 - С. Расстояние от вибродатчика 2 до центра масс 2 обозначено а; от вибродатчика 13 до центра масс 2-l; расстояние между вибродатчиками 11 и 13 - b. Прямая 14 проходит через ось вращения винта 5, перпендикулярна ей и расположена в продольной плоскости симметрии 8 вертолета. Прямая 15 проходит через ось вращения винта 5 и перпендикулярна плоскости симметрия 8 вертолета.
Один продольный пробный дисбаланс несущего винта устанавливают на прямой 14 в первом положении 16 (ΔSX) и во втором положении с диаметрально противоположным направлением 17 (-ΔSX). Другой поперечный пробный дисбаланс несущего винта устанавливают на прямой 15 в первом положении 18 (ΔSZ) - во втором положении с диаметрально противоположным направлением 19 (-ΔSZ). При виде на вертолет спереди и сбоку прямые 14 и 15, положения пробных дисбалансов 16, 17 и 18, 19 показаны как на верхнем, так и на нижнем несущих винтах.
Способ определения дисбаланса несущих винтов вертолета реализуется следующим образом.
Измеряют амплитуды колебаний ZO,S; ZB,S; ZH,S фюзеляжа 1 вертолета на частоте ω вращения несущих винтов 3 и 4 при дисбалансах: продольных верхнего SX B, нижнего SX H винтов и поперечных верхнего SZ B, нижнего SZ H винтов по вибродатчикам 11, 12 и 13 при полете вертолета в режиме висения. Затем, прервав полет вертолета, устанавливают одну из лопастей винта в угловое положение ψ, закрепляют продольный пробный дисбаланс ΔSX на несущем винте, преимущественно на верхнем, в первом положении 16 и измеряют амплитуды колебаний ZO, ; ZB,X; ZH,X фюзеляжа с частотой ω на режиме висения. Прервав полет, устанавливают ту же лопасть в угловое положение ψ, закрепляют продольный пробный дисбаланс -ΔSX на несущем винте во втором положения 17 с диаметрально противоположным направлением и измеряют амплитуды колебаний ZO,-X; ZB,-X; ZH,-X, фюзеляжа с частотой ω на режиме висения.
Прерывают полет, устанавливают ту же лопасть в угловое положение ψ, закрепляют поперечный пробный дисбаланс ΔSZ на несущем винте в первом положении 18 и измеряют амплитуды колебаний ZO,Z; ZB,Z; ZH,Z фюзеляжа с частотой ω на режиме висения. Прервав полет, при угловом положении ψ той же лопасти закрепляют поперечный пробный дисбаланс -ΔSZ на несущем винте во втором положении 19 с диаметрально противоположным направлением и измеряют амплитуды колебаний ZO,-Z; ZB,-Z; ZH,-Z, фюзеляжа с частотой ω на режиме висения.
Вычисление собственно дисбаланса несущих винтов: продольных SX B, SX H и поперечных SZ B, SZ H осуществляют с помощью математических выражений (20), (21), (22).
Возможность осуществления технического решения следует из описания последовательности его реализации и следует из решения дифференциальных уравнений линейного перемещения по оси OZ и углового вокруг оси OX вертолета:
где М - масса вертолета;
j - момент инерции вертолета относительно оси OX.
Перемещения вертолета являются гармоническими с частотой вращения несущих винтов ω и происходят от дисбалансов винтов SX B, SX H, SZ B, SZ H c амплитудами (23), от продольных пробных дисбалансов ΔSX и -ΔSX с амплитудами соответственно (24) и (25), от поперечных пробных дисбалансов с амплитудами соответственно (26) и (27). В результате решения уравнений (28) движения вертолета получаем математические выражения (20), (21), (22) для вычисления дисбалансов несущих винтов вертолета.
В результате реализации заявляемого технического решения осуществляются определение дисбалансов несущих винтов и последующее их устранение - балансировка несущих винтов вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2003 |
|
RU2247344C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОНСТРУКЦИИ | 1991 |
|
RU2034255C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ВЕРТОЛЕТА | 2003 |
|
RU2241637C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ИЗДЕЛИЯ | 1999 |
|
RU2164671C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СКОРОСТНОЙ КОМБИНИРОВАННЫЙ ВЕРТОЛЕТ | 2014 |
|
RU2555086C1 |
| УСТРОЙСТВО ДОПОЛНИТЕЛЬНОЙ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2005 |
|
RU2281226C1 |
| УСТРОЙСТВО ДОПОЛНИТЕЛЬНОЙ КОМПЕНСАЦИИ РЕАКТИВНОГО МОМЕНТА НЕСУЩЕГО ВИНТА ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2005 |
|
RU2281227C1 |
Способ предназначен для использования в авиационной технике и позволяет определять дисбалансы несущих винтов вертолета, закрепленных на фюзеляже на различной высоте. Последовательно измеряя амплитуды колебаний фюзеляжа вертолета на режиме висения от дисбалансов несущих винтов и поочередно устанавливаемых на одном из винтов продольных и поперечных пробных дисбалансов, по математическим выражениям определяют дисбалансы каждого несущего винта. Способ позволяет определить дисбаланс каждого из двух несущих винтов. 3 ил.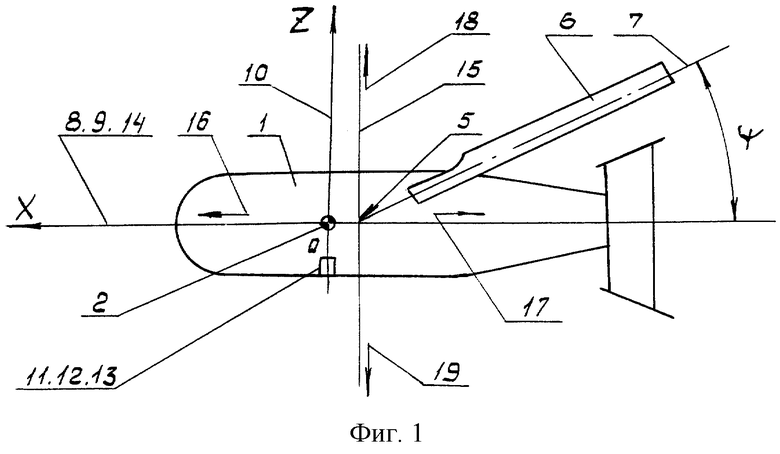
Способ определения дисбаланса несущих винтов вертолета, заключающийся в измерении величины вибраций фюзеляжа вертолета от дисбаланса и пробного дисбаланса винта, вычислении дисбаланса, отличающийся тем, что на одном из несущих винтов, преимущественно на верхнем, при угловом положении Ψ одной и той же лопасти невращающегося несущего винта относительно продольной плоскости симметрии вертолета устанавливают поочередно один продольный пробный дисбаланс ΔSx в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и расположенной в продольной плоскости симметрии вертолета, другой поперечный пробный дисбаланс ΔSz устанавливают в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и перпендикулярной продольной плоскости симметрии вертолета, измеряют амплитуды вибраций фюзеляжа вертолета, за измеряемые параметры принимают квадраты амплитуд угловых колебаний фюзеляжа вертолета ϕ относительно одной оси вертолета, преимущественно продольной, и квадраты амплитуд линейных колебаний Z0 фюзеляжа в центре масс вертолета по направлению другой оси вертолета, соответственно поперечной, а дисбалансы продольные верхнего Sx в, нижнего Sx н несущих винтов и поперечные верхнего Sz в, нижнего Sz н несущих винтов вычисляют по математическим выражениям:
пробные дисбалансы установлены на верхнем несущем винте вертолета:

пробные дисбалансы установлены на нижнем несущем винте вертолета:






j = S, Х, - Х, Z, - Z; где
ZВ,j - амплитуда линейных поперечных перемещений фюзеляжа вертолета, замеренная вибродатчиком, установленным выше центра масс вертолета на расстоянии a;
ZН,j - амплитуда линейных поперечных перемещений фюзеляжа вертолета, замеренная вибродатчиком, установленным ниже центра масс вертолета на расстоянии l;
b = а + l;
hВ - расстояние от центра масс до верхнего несущего винта вертолета;
hН - расстояние от центра масс до нижнего несущего винта вертолета;
С = hВ - hН;
ϕs; ZО,S; ZВ,S; ZН,S - амплитуды перемещений фюзеляжа вертолета от дисбалансов двух винтов;
ϕx; ZО,Х; ZВ,Х; ZН,Х - амплитуды перемещений фюзеляжа вертолета от продольного дополнительного дисбаланса ΔSХ в первом положении;
ϕx; ZО,-Х; ZВ,-Х; ZН,-Х - амплитуды перемещений фюзеляжа вертолета от продольного дополнительного дисбаланса -ΔSХ во втором положении с диаметрально противоположным направлением;
ϕz; ZО,Z; ZВ,Z; ZН,Z - амплитуды перемещений фюзеляжа вертолета от поперечного дополнительного дисбаланса ΔSZ в первом положении;
ϕ-Z; ZО,-Z; ZВ,-Z; ZН,-Z - амплитуды перемещений фюзеляжа вертолета от поперечного дополнительного дисбаланса -ΔSZ во втором положении с диаметрально противоположным направлением.
| RU 94041467 А1, 27.09.1996 | |||
| US 3945256, 23.03.1976 | |||
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ВОЗДУШНО-ВИНТОВОГО АГРЕГАТА СИЛОВОЙ УСТАНОВКИ НА САМОЛЕТЕ | 1992 |
|
RU2039958C1 |
| US 3952601, 27.04.1976. | |||

