Изобретение относится к области метеорологического приборостроения, в частности к устройствам для измерения величины (модуля) и направления вектора скорости ветра на борту вертолета на стоянке до запуска силовой установки, на стоянке при вращении несущего винта, при рулении и маневрировании по земной поверхности (стартовые режимы), при взлете, снижении, висении и посадке (взлетно-посадочные режимы). Достоверная информация о величине и направлении вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах необходима экипажу для предотвращения авиационных происшествий, связанных с опрокидыванием вертолета на бок и на хвостовой винт, соударением несущего винта с землей и с хвостовым винтом и т.п. (см. статью: Ерусалимский М.А., Егоров В.Н. Экипажам вертолетов - информационную поддержку // Авиасоюз. - 2011. №2. - С. 24-26 - [1]) при превышении параметров вектора скорости ветра ограничений, регламентируемых руководством полетной эксплуатации вертолета (см.: Руководство по летной эксплуатации вертолета Ми-8 (издание 4). - М: Авторитет. - 1996. - 554 с. - [2]).
Известны устройства (датчики) для измерения скорости и направления вектора скорости ветра, реализующие тахометрический метод, которые содержат, реагирующие на скорость набегающего воздушного потока винтокрылые ветроприемники, которые жестко ориентированы в пространстве относительно друг друга. Набегающий воздушный поток приводит во вращение ветроприемники. По частоте и направлению вращения ветроприемников, регистрируемых тахометрическими преобразователями, вычисляются скорость и направление ветра (патент РФ на изобретение №2030749. Датчик параметров ветра (Атрощенков В.Г., Блящев В.В., Павлов А.Л. - [3]).
Указанные устройства имеют вращающиеся элементы, сложную конструкцию и ограниченный диапазон измерения угла направления вектора скорости ветра. Кроме того, при установке таких устройств на фюзеляже вертолета на их работу будут оказывать существенное влияние индуктивные потоки от несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Известны устройства для измерения параметров вектора скорости ветра, реализующие флюгерно-тахометрический метод измерения, в которых вращающийся винтокрылый ветроприемник устанавливается на свободно ориентируемый по направлению вектора скорости ветра флюгер. Регистрируя угловое положение флюгера, например с помощью синусно-косинусного трансформатора и частоту вращения винтокрылого ветроприемника вычисляются параметры вектора скорости ветра (см. книгу: Приборы и установки для метеорологических измерений на аэродромах / Под ред. Л.П. Афиногенова и Е.В. Романова. - Л.: Гидрометеоиздат. - 1981. - 296 с. - [4]).
Указанные устройства также имеют установленные в набегающем воздушном потоке вращающейся и подвижные элементы, снижающие надежность их работы в бортовых условиях. При установке таких устройств на фюзеляже вертолета на их работу также будут оказывать существенное влияние воздушные потоки вихревой колонны несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта, на стартовых и взлетно-посадочных режимах вертолета.
Известно устройство (система) измерения параметров вектора скорости ветра с неподвижным ветроприемником (датчиком скорости ветра), которое представляет собой сферу в виде двух ортогональных трубчатых колец, на которых закреплены восемь ультразвуковых пьезокерамических преобразователей, образующих четыре пары излучателей и приемников, которые располагаются в противоположных вершинах куба на одинаковом расстоянии друг от друга. По разности прохождения ультразвуковых акустических сигналов от излучателей до приемников из-за геометрического сложения скорости распространения звука и проекций вектора скорости ветра на линии распространения ультразвуковых колебаний вычисляются горизонтальная и вертикальная составляющие векторы скорости ветра, величина и направление горизонтального ветра (см. статью: Азбукин А.А., Богушевич А.Я., Кобзов А.А. и др. Автоматические метеостанции АМК-03 и их модификации // Датчики и системы. - 2012. - №3. - С. 42-52 - [5]).
Такая конструкция ветроприемника (датчика скорости ветра) обладает повышенной механической жесткостью, что позволяет использовать ее как в стационарных, так и в мобильных модификациях приборов, к которым предъявляются требования по устойчивости к воздействию ударных и вибрационных нагрузок.
Однако при установке такого устройства (системы) измерения параметров вектора скорости ветра на фюзеляже вертолета на его (ее) работу также будут оказывать существенное влияние индуктивные потоки вихревой колонны несущего винта, ограничивающие возможность измерения параметров вектора скорости ветра на стоянке при вращении несущего винта и на стартовых и взлетно-посадочных режимах вертолета.
За прототип взята система измерения параметров вектора скорости ветра с неподвижным ветроприемником, построенная на основе неподвижного многоканального проточного аэрометрического приемника (приемника давлений), информативные сигналы (давления) которого преобразуются и обрабатываются в соответствии с алгоритмами, позволяющими определить величину (модуль) и направление вектора скорости ветра во всей азимутальной плоскости, обеспечивая панорамное измерение вектора скорости горизонтального ветра (см. книгу Солдаткин В.М. Методы и средства измерения аэродинамических углов летательных аппаратов. - Казань: Изд-во Казан, гос. техн. ун-та. - 2001. - С. 282-393 - [6]).
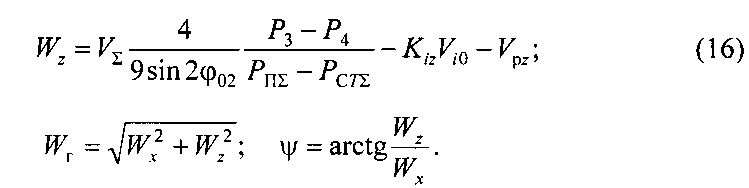
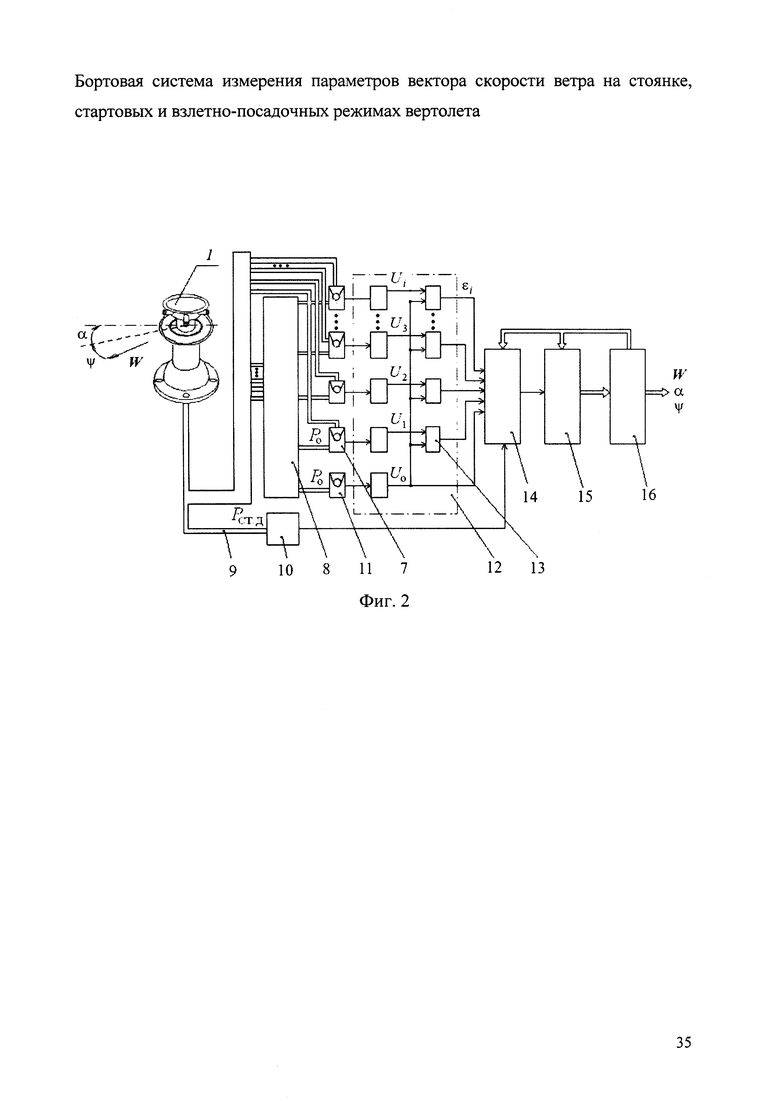
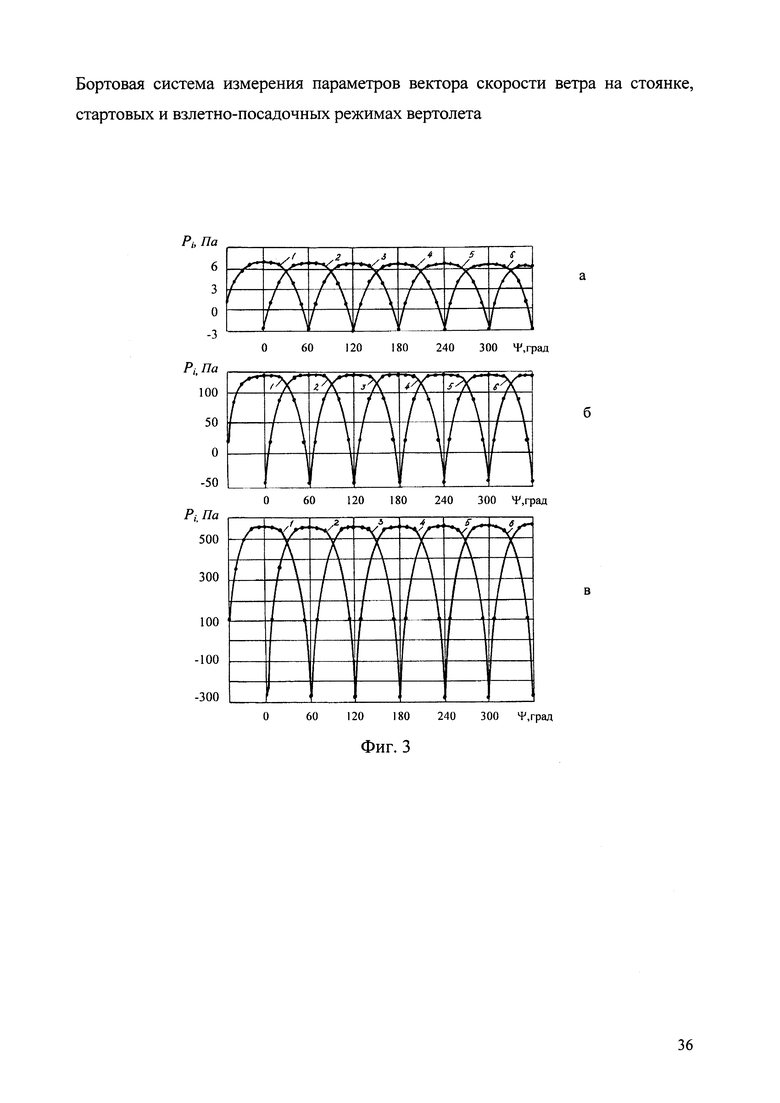
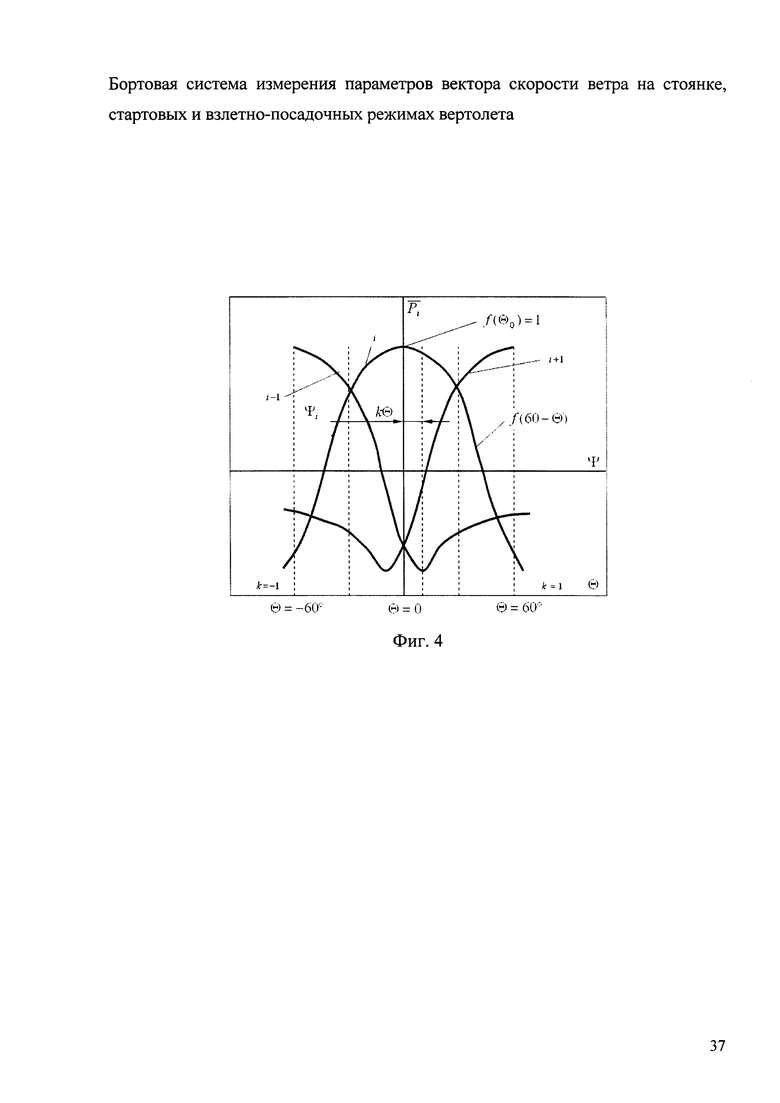
На фиг. 1 показана конструктивная схема неподвижного многоканального проточного аэрометрического приемника устройства - прототипа. На фиг. 2 приведена структурно-функциональная схема прототипа - системы, измерения параметров вектора скорости горизонтального ветра. На фиг. 3 приведены угловые характеристики неподвижного многоканального проточного аэрометрического приемника. На фиг. 4 иллюстрируется принцип преобразования реальной угловой характеристики полного давления неподвижного многоканального проточного приемника в безразмерную систему координат.
В неподвижном многоканальном проточном аэрометрическом приемнике 1 (фиг. 1) с помощью экранирующих дисков 2 и 3 формируется профилированный воздушный поток, параметры которого зависят от величины (модуля) и углов направления вектора скорости набегающего воздушного потока (вектора скорости ветра  ). Посредством трубок полного давления 4 равномерно расположенных в проточном канале между дисками 2 и 3, воспринимаются давления Pi, зависящие от углового положения i-й трубки относительно направления набегающего воздушного потока в азимутальной плоскости (угол ψ направления вектора скорости ветра
). Посредством трубок полного давления 4 равномерно расположенных в проточном канале между дисками 2 и 3, воспринимаются давления Pi, зависящие от углового положения i-й трубки относительно направления набегающего воздушного потока в азимутальной плоскости (угол ψ направления вектора скорости ветра  в горизонтальной плоскости). На входных кромках верхнего и нижнего экранирующих дисков расположены отверстия 5 для забора давлений Рαв и Рαн, определяющих угол направления набегающего воздушного потока в вертикальной плоскости (угол α направления вектора скорости ветра
в горизонтальной плоскости). На входных кромках верхнего и нижнего экранирующих дисков расположены отверстия 5 для забора давлений Рαв и Рαн, определяющих угол направления набегающего воздушного потока в вертикальной плоскости (угол α направления вектора скорости ветра  в вертикальной плоскости). Посредством канавок 6 на внутренних поверхностях экранирующих дисков 2 и 3 воспринимается дросселированное статическое давление РСТ.Д набегающего воздушного потока. Воспринимаемые давления PI, Рαв, Рαн, РСТ.Д по пневматическим каналам передаются на входы соответствующих пневмоэлектрических преобразователей.
в вертикальной плоскости). Посредством канавок 6 на внутренних поверхностях экранирующих дисков 2 и 3 воспринимается дросселированное статическое давление РСТ.Д набегающего воздушного потока. Воспринимаемые давления PI, Рαв, Рαн, РСТ.Д по пневматическим каналам передаются на входы соответствующих пневмоэлектрических преобразователей.
На фиг. 2 приведена структурно-функциональная схема системы измерения параметров вектора скорости ветра, в которой в качестве пневмоэлектрических преобразователей использованы струйно-конвективные (термоанемометрические) преобразователи. Воспринимаемые неподвижным многоканальным проточным аэрометрическим приемником 1 давления Pi подаются на входы термоанемометрических преобразователей 7, а также в усредняющую камеру 8, формирующую опорное давление Р0, которое подается на другие входы термоанемометрических преобразователей 7. Воспринимаемое дросселированное статическое давление РСТ.Д по каналу 9 подается на вход датчика абсолютного давления 10. Компенсационный термоанемометрический преобразователь 11, подключенный к осредняющей камере 8, формирует опорный сигнал U0, с помощью которого реализуется способ дифференциального измерительного преобразования давлений Рi в выходные электрические сигналы εi электроизмерительных схем 12. В схемах 13 обеспечивается нормирование информативных сигналов εi, которые далее через мультиплексор 14 и аналого-цифровой преобразователь 15 подаются на микропроцессор 16. Обрабатывая по определенному алгоритму массив сигналов, пропорциональных воспринимаемым давлениям Pi, микропроцессор 16 вычисляет величину (модуль) W скорости ветра, угол ψ направления горизонтального ветра, а по давлениям Рαв и Рαн и направление α вектора скорости ветра  в вертикальной плоскости.
в вертикальной плоскости.
Система измерения параметров вектора скорости ветра работает следующим образом.
Неподвижный многоканальный проточный аэрометрический приемник 1 (фиг. 2) устанавливается вне зоны действия индуктивных потоков вихревой колонны несущего винта, например на втулке несущего винта вертолета. Такой неподвижный аэрометрический приемник представляет собой многократно повторяющиеся в азимутальном направлении проточные каналы. Посредством трубок полного давления 1 (фиг. 1), равномерно расположенных в проточном канале между дисками 2 и 3, воспринимаются давления Pi, зависящие от углового положения i-й трубки относительно направления набегающего воздушного потока в азимутальной плоскости.
На фиг. 3 приведены экспериментальные угловые характеристики трубок полного давления неподвижного многоканального проточного аэрометрического приемника при значениях скорости набегающего воздушного потока вектора скорости ветра W=3м/с, W=15м/c, W=30м/c. Как видно из фиг. 3, угловые характеристики трубок полного давления неподвижного многоканального проточного аэрометрического приемника симметричны относительно осей трубок полного давлений. При этом угловые характеристики трубок полного давления с номерами i-1 и i+1 имеют точку пересечения, угловая координата которой совпадает с координатой максимума угловой характеристики i-й трубки полного давления. Пересекающиеся ветви угловых характеристик i-1 и i+1 трубок полного давления имеют участки достаточно большой угловой протяженностью, в пределах которых воспринимаемые давления Pi-1, Pi и Pi+1 зависят от угла ψ направления воздушного потока, набегающего на неподвижный многоканальный проточный аэрометрический приемник в азимутальной плоскости.
С помощью отверстий 5, расположенных на входных поверхностях экранирующих дисков 2 и 3 (фиг. 2), воспринимаются давления Рαв и Рαн, определяющие направление α набегающего воздушного потока вектора ветра в вертикальной плоскости. Посредством канавок 6, распложенных на внутренних поверхностях экранирующих дисков 2 и 3, воспринимается дросселированное статической давление РСТ.Д набегающего воздушного.
С помощью термоанемометрических преобразователей 7 и электроизмерительных схем 12, датчика абсолютного давления 10 (фиг. 2) воспринимаемые давления Pi, Рαв, Рαн, РСТ.Д преобразуются в пропорциональные им электрические сигналы, которые через мультиплексор 14, аналого-цифровой преобразователь 15 подаются в микропроцессор 16, в котором в соответствии с определенными алгоритмами вычисляются параметры вектора скорости ветра.
Указанные особенности угловых характеристик неподвижного многоканального проточного аэрометрического приемника позволяют использовать следующий алгоритм обработки первичных информативных сигналов РI для определения параметров вектора скорости ветра W.
На первом этапе обработки массива давлений Рi определяется номер i-й трубки полного давления, в пределах которой локализовано направление скорости V набегающего воздушного потока, равной по величине и обратной по направлению скорости ветра W. За такую i-ю трубку полного давления, как следует из фиг. 3, принимается трубка, в которой значение измеренного давления Рi является наибольшим из всех трубок полного давления (номера трубок полного давления обозначаются i=0,1,2,3… n). При этом принимается, что ось трубки полного давления под номером i=0 совпадает с началом исходной системы координат отсчета угла направления ψ вектора скорости ветра.
По определенному номеру i-й трубки полного давления, в которой давление Рi наибольшее, определяется первое приближение ψmi угловой координаты направления вектора скорости ветра W в соответствии с соотношением

где n - количество расположенных под одинаковым углом трубок полного давления (как правило n=6 или n=8).
На втором этапе обработки массива давлений Рi проводится предварительная оценка положения вектора скорости ветра W. С этой целью сравниваются между собой давления Рi-1 и Pi+1 и проверяется какое из неравенств выполняется

где Pi-1 и Рi+1 - давления, измеренные в трубках полного давления, смежных с i-й трубкой.
В случае выполнения первого неравенства вектор скорости ветра W находится слева от i-й трубки полного давления, при выполнении второго условия - справа от i-й трубки. Указанным положениям соответствуют знаки «плюс» или «минус» отклонения Δψ, действительного положения ψ вектора скорости ветра от его первого приближения ψmi.
Для определения точного значения угловой координаты у вектора скорости ветра W осуществляется преобразование реальной угловой характеристики трубок полного давления в другую систему координат путем введения безразмерной угловой координаты θ, начало которой совпадает с точкой пересечения смежных ветвей угловых характеристик i-1 и i+1 трубок полного давления, как показано на фиг. 4.
Сущность такого преобразования координат сводится к замене углового отклонения Δψ угловой характеристики i-й трубки полного давления от реального направления ψ вектора скорости ветра W на безразмерную координату θ, изменение которой определяется выбором шага t0 введенной координатной сетки. Угловое положение θ i-й трубки полного давления относительно направления ψ вектора скорости ветра W в новой системе координат определяется из решения одного из уравнений:

где f(θ) и f(-θ) - аппроксимирующие полиномы степени k, вычисленные по результатам предварительной градуировки неподвижного многоканального проточного аэрометрического приемника и описывающие соответственно правую и левую части угловой характеристики смежных i-1 и i+1 трубок полного давления во введенной системе координат.
Тогда второе приближение угловой координаты ψ вектора скорости ветра в исходной системе координат будет определяться выражением

где t0 - координатный шаг сплайн-функции, реализующей аппроксимирующий полином Рi=f(θ) в безразмерной системе координат, например при n=6 t0=60°.
Для определения модуля W вектора скорости ветра по полученному значению θx безразмерного углового положения i-й трубки полного давления вычисляется значение давления Pimах, соответствующее совпадению направления вектора скорости ветра с осью i-й трубки полного давления. Это вычисление проводится в соответствии со следующими зависимостями:
По полученному значению Pi max определяется численное значение величины W вектора скорости ветра с использованием выражения вида

где  - плотность воздуха на высоте Н; РH и ТН - статическое давление и абсолютная температура на высоте стоянки Н0; Р0=760 мм рт.ст.=101325 Па, и р0=1,225 кг/м3=0,125 кгс2/м4 и Т0=288,15 К - статическое давление, плотность воздуха и абсолютная температура на высоте Н=0 стандартной атмосферы.
- плотность воздуха на высоте Н; РH и ТН - статическое давление и абсолютная температура на высоте стоянки Н0; Р0=760 мм рт.ст.=101325 Па, и р0=1,225 кг/м3=0,125 кгс2/м4 и Т0=288,15 К - статическое давление, плотность воздуха и абсолютная температура на высоте Н=0 стандартной атмосферы.
Статическое давление РН и абсолютная температура ТН на высоте Н вертолета определяются по статическому давлению РСТ.Д, воспринимаемому неподвижным проточным аэрометрическим приемником 1 (фиг. 1), и по показаниям приемника температуры торможения Тт, установленного на фюзеляже вертолета.
По давлениям Pαi и Pαi-1, воспринимаемыми отверстиями на нижнем и верхнем экранирующих дисках неподвижного многоканального проточного аэрометрического приемника, определяется положение α вектора скорости набегающего воздушного потока (скорости ветра) в вертикальной плоскости, например по соотношению вида

где φ0 - угол расположения приемных отверстий по каналу угла атаки.
По дросселированному статическому давлению РСТ.Д, воспринимаемого канавками, установленными в характерном сечении проточного аэрометрического приемника, определяется барометрическая высота в соответствии со стандартной зависимостью

где τ=0,0065 К/м - температурный градиент; R=29,27 м/К - газовая постоянная воздуха.
Таким образом, с помощью неподвижного многоканального проточного аэрометрического приемника, установленного вне зоны действия вихревой колонны несущего винта, например на втулке несущего винта вертолета можно определить величину (модуль) и углы направления ψ и α вектора скорости ветра в горизонтальной и вертикальной плоскостях на стоянке до запуска силовой установки.
При рулении и маневрировании по земной поверхности, а также на взлетно-посадочных режимах вертолета неподвижный многоканальный проточный аэрометрический приемник воспринимает набегающий воздушный поток, определяющий величину (модуль) и углы направления (угол скольжения и угол атаки) вектора истинной воздушной скорости VB. Используя дополнительную информацию о параметрах вектора скорости руления VP по земной поверхности и о параметрах вектора VП путевой скорости по измеренным параметрам вектора истинной воздушной скорости VВ можно определить величину (модуль) и углы направления вектора скорости ветра при рулении и маневрировании вертолета по земной поверхности (стартовые режимы) и на взлетно-посадочных режимах.
Однако, установка неподвижного многоканального проточного аэрометрического приемника вне зоны влияния вихревой колонны несущего винта, например на втулке несущего винта невозможно на ряде типов вертолетов, что ограничивает область применения устройства-прототипа, построенного на его основе. При установке неподвижного многоканального проточного аэрометрического приемника на фюзеляже вертолета на его работу оказывают существенное влияние индуктивные потоки вихревой колонны несущего винта, ограничивая возможность измерения параметров вектора скорости ветра на стоянке при запуске силовой установки, при рулении и маневрировании по земной поверхности и на взлетно-посадочных режимах вертолета.
Технический результат, на достижение которого направлена заявляемое изобретение, заключается в измерении параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета с помощью расположенного на фюзеляже вертолета неподвижного ветроприемного устройства, в расширении функциональных возможностей и области применения бортовой системы измерения параметров вектора скорости ветра на вертолетах различного класса и назначения.
Технический результат достигается следующим. В бортовой системе измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета, содержащей неподвижное ветроприемное устройство, преобразователи информативных сигналов, каналы аналого-цифрового преобразования и вычислительное устройство, ветроприемное устройство выполнено в виде установленного на фюзеляже вертолета в зоне действия вихревой колонны несущего винта неподвижного пространственно распределенного комбинированного аэрометрического приемника, включающего неподвижный многоканальный проточный аэрометрический приемник, воспринимающий давления, определяющие величину и направление вектора скорости ветра на стоянке до запуска силовой установки, на верхней поверхности верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника в плоскости, параллельной плоскости симметрии вертолета, установлен осесимметричный приемник, например в виде полусферы, на оси симметрии осесимметричного аэрометрического приемника расположено отверстие, являющееся приемником полного давления результирующего воздушного потока вихревой колонны несущего винта, в плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например, полусферического аэрометрического приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии осесимметричного, например полусферического аэрометрического приемника в плоскости симметрии вертолета, в плоскости, перпендикулярной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического аэрометрического приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии аэрометрического приемника в плоскости, перпендикулярной плоскости симметрии вертолета, при этом пневматические выходы неподвижного многоканального проточного аэрометрического приемника и установленного на нем осесимметричного, например полусферического аэрометрического приемника соединены со входами пневмоэлектрических преобразователей, выходы которых через канал аналого-цифрового преобразования подключены ко входу вычислительного устройства, выходы которого являются выходами по параметрам вектора скорости ветра на стоянке до запуска силовой установки, а также на стоянке при вращении несущего винта, при рулении и маневрировании по земной поверхности (стартовые режимы), при взлете, при снижении, висении и посадке (взлетно-посадочные режимы) вертолета.
При этом вычислительное устройство выполнено в виде вычислителя, реализующего как алгоритмы определяющие параметры вектора скорости ветра на стоянке до запуска силовой установки (см. выражения (1)-(6)), так и на стартовых и взлетно-посадочных режимах вертолета:
- на стоянке при запуске силовой установки;
- при рулении и маневрировании вертолета по земной поверхности (стартовые режимы);
- при взлете, наборе высоты, снижении, висении и посадке вертолета (взлетно-посадочные режимы).
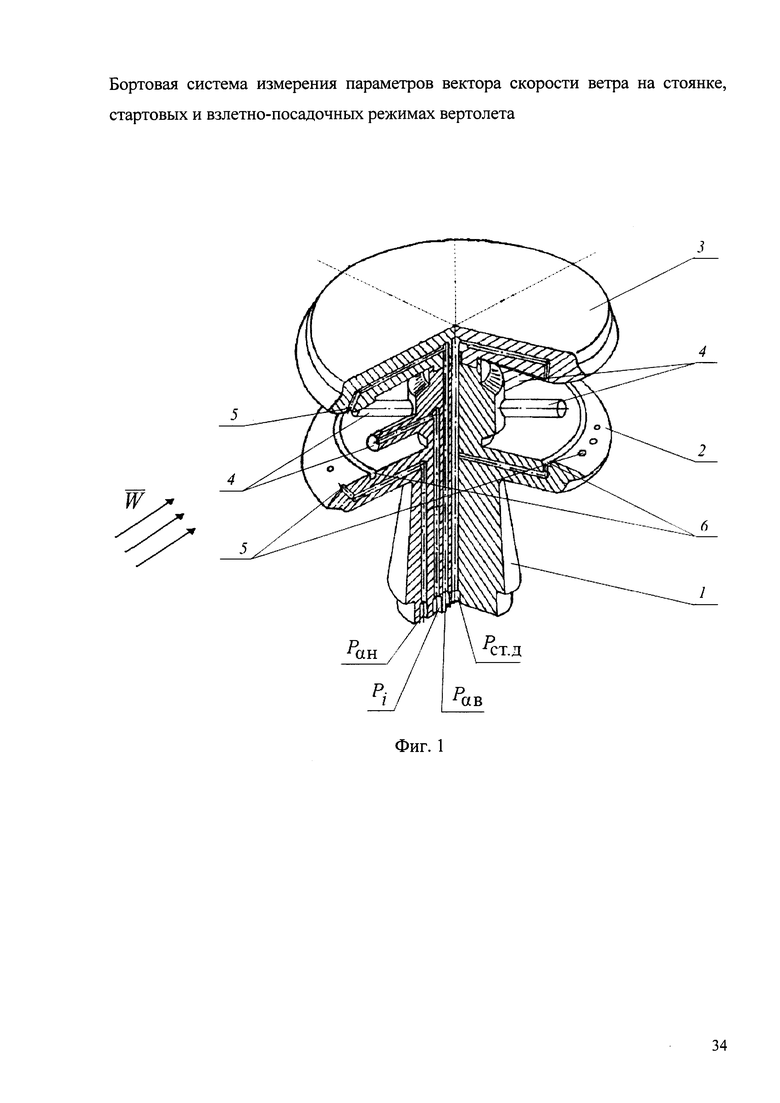
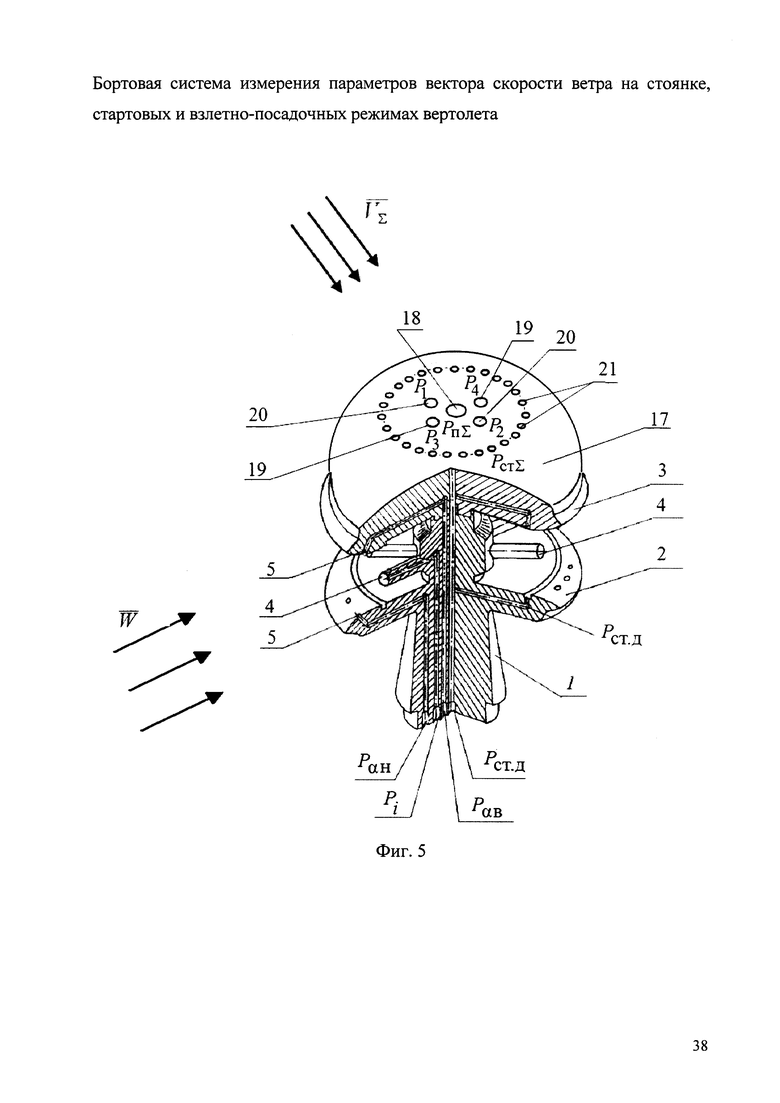
Сущность изобретения поясняется на фиг. 5. На фиг. 5 приведена конструктивная схема неподвижного пространственно распределенного комбинированного аэрометрического приемника, обеспечивающего измерение параметров вектора скорости ветра на стоянке до запуска силовой установки, на стоянке при вращении несущего винта, при рулении и маневрировании по земной поверхности, на взлете и наборе высоты, при снижении, висении и посадке вертолета, т.е. обеспечивающего расширение функциональных возможностей и области применения бортовой системы измерения параметров вектора скорости ветра, построенной на его основе.
Здесь 1 - неподвижный многоканальный проточный аэрометрический приемник; 2 и 3 - нижний и верхний экранирующие диски; 4 - трубки полного давления; 5 - отверстия для забора давлений Рαн и Рαв, определяющих угол направления вектора скорости ветра  в вертикальной плоскости; 6 - канавки для забора дросселированного статического давления РСТ.Д набегающего воздушного потока; 17 - осесимметричный, например полусферический аэрометрический приемник; 18 - отверстие, являющееся приемником полного давления PП∑ результирующего набегающего воздушного потока вихревой колонны несущего винта; 19 - отверстия, являющиеся приемниками давлений Р1 и Р2, определяющих угловое положение вектора
в вертикальной плоскости; 6 - канавки для забора дросселированного статического давления РСТ.Д набегающего воздушного потока; 17 - осесимметричный, например полусферический аэрометрический приемник; 18 - отверстие, являющееся приемником полного давления PП∑ результирующего набегающего воздушного потока вихревой колонны несущего винта; 19 - отверстия, являющиеся приемниками давлений Р1 и Р2, определяющих угловое положение вектора  результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, параллельной плоскости симметрии вертолета; 20 - отверстия, являющиеся приемниками давлений Р3 и Р4, определяющих угловое положение вектора результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, перпендикулярной плоскости симметрии вертолета; 21 - отверстия, являющиеся приемниками статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта.
результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, параллельной плоскости симметрии вертолета; 20 - отверстия, являющиеся приемниками давлений Р3 и Р4, определяющих угловое положение вектора результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, перпендикулярной плоскости симметрии вертолета; 21 - отверстия, являющиеся приемниками статического давления РСТ∑ результирующего воздушного потока вихревой колонны несущего винта.
Неподвижный пространственно распределенный комбинированный аэрометрический приемник, включает неподвижный многоканальный проточный аэрометрический приемник 1 в виде двух разнесенных по высоте экранирующих дисков 2 и 3, между внутренними поверхностями которых в азимутальной плоскости под одинаковыми углами друг к другу расположены трубки полного давления 4 для забора давлений Pi, определяющих величину (модуль) и направление ψ вектора скорости ветра  относительно оси неподвижного многоканального проточного аэрометрического приемника в горизонтальной плоскости на стоянке до запуска силовой установки вертолета. На передних профилированных поверхностях экранирующих дисков 2 и 3 расположены отверстия 5 для забора давлений Рαв и Рαн, определяющих угол α направления вектора скорости ветра
относительно оси неподвижного многоканального проточного аэрометрического приемника в горизонтальной плоскости на стоянке до запуска силовой установки вертолета. На передних профилированных поверхностях экранирующих дисков 2 и 3 расположены отверстия 5 для забора давлений Рαв и Рαн, определяющих угол α направления вектора скорости ветра  в вертикальной плоскости, на внутренних поверхностях экранирующих дисков 2 и 3 расположены кольцевые канавки 6 для забора дросселированного статического давления PСТ.Д набегающего воздушного потока.
в вертикальной плоскости, на внутренних поверхностях экранирующих дисков 2 и 3 расположены кольцевые канавки 6 для забора дросселированного статического давления PСТ.Д набегающего воздушного потока.
Для получения информации о параметрах вектора скорости ветра  на стоянке при работающей силовой установке и вращении несущего винта вертолета, когда неподвижный многоканальный проточный аэрометрический приемник 1 находится в створе вихревой колонны несущего винта, подвержен влиянию его индуктивных потоков и не обеспечивает измерение параметров вектора скорости ветра, на наружной поверхности верхнего экранирующего диска 3 установлен осесимметричный, например полусферический аэрометрический приемник 17 для восприятия параметров вектора скорости
на стоянке при работающей силовой установке и вращении несущего винта вертолета, когда неподвижный многоканальный проточный аэрометрический приемник 1 находится в створе вихревой колонны несущего винта, подвержен влиянию его индуктивных потоков и не обеспечивает измерение параметров вектора скорости ветра, на наружной поверхности верхнего экранирующего диска 3 установлен осесимметричный, например полусферический аэрометрический приемник 17 для восприятия параметров вектора скорости  результирующего воздушного потока вихревой колонны несущего винта. На верхней поверхности осесимметричного, например полусферического аэрометрического приемника на его оси симметрии расположено отверстие 18, являющееся приемником полного давления РП∑ результирующего воздушного потока вихревой колонны несущего винта вертолета. На верхней поверхности осесимметричного, например полусферического аэрометрического приемника, симметрично относительно его оси симметрии в плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом φ01 к оси симметрии осесимметричного, например, полусферического аэрометрического приемника расположены отверстия 19, являющиеся приемниками давлений Р1 и Р2, определяющих угловое положение φ1 вектора
результирующего воздушного потока вихревой колонны несущего винта. На верхней поверхности осесимметричного, например полусферического аэрометрического приемника на его оси симметрии расположено отверстие 18, являющееся приемником полного давления РП∑ результирующего воздушного потока вихревой колонны несущего винта вертолета. На верхней поверхности осесимметричного, например полусферического аэрометрического приемника, симметрично относительно его оси симметрии в плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом φ01 к оси симметрии осесимметричного, например, полусферического аэрометрического приемника расположены отверстия 19, являющиеся приемниками давлений Р1 и Р2, определяющих угловое положение φ1 вектора  результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, параллельной плоскости симметрии вертолета. В плоскости, перпендикулярной плоскости симметрии вертолета, на верхней поверхности осесимметричного, например полусферического аэрометрического приемника под одинаковым углом φ02 к его оси расположены отверстия 20, являющиеся приемниками давлений Р3 и Р4, определяющих угловое положение φ2 вектора
результирующей скорости набегающего воздушного потока вихревой колонны несущего винта в плоскости, параллельной плоскости симметрии вертолета. В плоскости, перпендикулярной плоскости симметрии вертолета, на верхней поверхности осесимметричного, например полусферического аэрометрического приемника под одинаковым углом φ02 к его оси расположены отверстия 20, являющиеся приемниками давлений Р3 и Р4, определяющих угловое положение φ2 вектора  результирующей скорости набегающего воздушного потока вихревой колонны несущего винта относительно оси симметрии осесимметричного аэрометрического приемника в плоскости, перпендикулярной плоскости симметрии вертолета. На боковой поверхности осесимметричного, например полусферического аэрометрического приемника 17 расположены отверстия 21, являющиеся приемником статического давления РСТ∑ результирующего набегающего воздушного потока вихревой колонны несущего винта.
результирующей скорости набегающего воздушного потока вихревой колонны несущего винта относительно оси симметрии осесимметричного аэрометрического приемника в плоскости, перпендикулярной плоскости симметрии вертолета. На боковой поверхности осесимметричного, например полусферического аэрометрического приемника 17 расположены отверстия 21, являющиеся приемником статического давления РСТ∑ результирующего набегающего воздушного потока вихревой колонны несущего винта.
Приемники давлений Р1 и Р2, Р3 и Р4, РП∑ и РСТ∑, воспринимаемых осесимметричным, например полусферическим аэрометрическим приемником 17, так же как и приемники давлений Рi, Рαн, Рαв, РСТ.Д, воспринимаемых неподвижным многоканальным проточным аэрометрическим приемником 1, соединены со входами пневмоэлектрических преобразователей перепадов давлений и датчиков абсолютного давления, выходы которых через канал аналого-цифрового преобразования, например последовательно соединенные мультиплексор и аналого-цифровой преобразователь, как показано на фиг. 2, подключены ко входу вычислительного устройства, например микропроцессора, выходы которого являются выходами бортовой системы измерения параметров вектора ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета. На вход вычислительного устройства через канал аналого-цифрового преобразования также подключены выходы приемника температуры торможения TТ∑ результирующего воздушного потока вихревой колонны несущего винта, а также выходы спутниковой навигационной системы, определяющие продольную Vpx и боковую Vpz скорости руления вертолета по земной поверхности, и выходы доплеровского измерителя путевой скорости Vп и угла сноса φс вертолета.
Неподвижный пространственно распределенный комбинированный аэрометрический приемник устанавливается вблизи фюзеляжа в зоне действия вихревой колонны несущего винта вертолета. При этом ось трубки полного давления неподвижного многоканального проточного аэрометрического приемника, номер i которой принят за нулевой, находится в плоскости, параллельной плоскости симметрии вертолета. При этом оси отверстий 19 для забора давлений Р1 и Р2 осесимметричного, например полусферического аэрометрического приемника также находится в плоскости, параллельной плоскости симметрии вертолета.
При работе бортовой системы измерения параметров вектора скорости ветра имеет место следующие характерные режимы:
1) режим стоянки вертолета до запуска силовой установки;
2) режим стоянки вертолета при запуске силовой установки и вращении несущего винта;
3) режим руления и маневрирования вертолета по земной поверхности;
4) взлетно-посадочные режимы вертолета.
1. На режиме стоянки вертолета до запуска силовой установки параметры вектора скорости ветра определяются по давлениям Pi, Рαн, Рαв и РСТ.Д, воспринимаемым неподвижным многоканальным проточным аэрометрическим приемником.
При наличии ветра на стоянке до запуска силовой установки с помощью неподвижного многоканального проточного аэрометрического приемника воспринимаются (регистрируются) давления Pi, Рαн, Рαв и РСТ.Д, которые подаются на входы пневмоэлектрических преобразователей перепадов давлений и датчика абсолютного давления, выходы которых через канал аналого-цифрового преобразования (последовательно соединенные мультиплексор и аналого-цифровой преобразователь) подаются в вычислительное устройство (микропроцессор).
В соответствии с воспринимаемыми давлениями Pi, Рαн, Рαв микропроцессор обрабатывает информацию и вычисляет величину (модуль W) и углы направления ψ и α вектора скорости ветра  согласно уравнениям (1)-(6), приведенным при описании устройства-прототипа. Кроме того, по дросселированному статическому давлению РСТ.Д в соответствии с зависимостью (7) в микропроцессоре вычисляется барометрическая высота H0 места стоянки вертолета.
согласно уравнениям (1)-(6), приведенным при описании устройства-прототипа. Кроме того, по дросселированному статическому давлению РСТ.Д в соответствии с зависимостью (7) в микропроцессоре вычисляется барометрическая высота H0 места стоянки вертолета.
2. На режиме стоянки вертолета при запуске силовой установки и вращении несущего винта параметры вектора скорости ветра определяются по давлениям Р1 и Р2, Р3 и Р4, РП∑, РСТ∑, воспринимаемым осесимметричным, например полусферическим аэрометрическим приемником, установленным на наружной поверхности верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника.
На стоянке при вращении несущего винта в качестве основных информативных параметров при определении величины и углов направления вектора скорости ветра используются параметры вектора скорости  результирующего воздушного потока вихревой колонны несущего винта.
результирующего воздушного потока вихревой колонны несущего винта.
На стоянке при запуске силовой установки и вращении несущего винта без учета отраженного от земной поверхности воздушного потока вихревой колонны несущего винта вектор скорости  результирующего воздушного потока вихревой колонны несущего винта, набегающего на осесимметричный, например полусферический аэрометрический приемник, представляет собой сумму
результирующего воздушного потока вихревой колонны несущего винта, набегающего на осесимметричный, например полусферический аэрометрический приемник, представляет собой сумму
вектора скорости ветра  и вектора скорости
и вектора скорости 
Вектор Vi индуктивного потока несущего винта можно представить в виде стационарной составляющей  индуктивного потока и флуктуационной составляющей
индуктивного потока и флуктуационной составляющей  , обусловленной маховыми движениями лопасти и работой автомата перекоса и приводящей к флуктуациям углов скоса вихревой колонны в интервале порядка ±2…3 угл. град. (см. книгу: Браверманн А.С., Вайнтруб А.П. Динамика вертолета. Предельные режимы полета. - М.: Машиностроение. - 1988. - 280 с. - [7]). Так как круговые частоты флуктуационных составляющих Vфi вектора
, обусловленной маховыми движениями лопасти и работой автомата перекоса и приводящей к флуктуациям углов скоса вихревой колонны в интервале порядка ±2…3 угл. град. (см. книгу: Браверманн А.С., Вайнтруб А.П. Динамика вертолета. Предельные режимы полета. - М.: Машиностроение. - 1988. - 280 с. - [7]). Так как круговые частоты флуктуационных составляющих Vфi вектора  кратны угловой скорости ωнв вращения несущего винта, то вектор
кратны угловой скорости ωнв вращения несущего винта, то вектор  флуктуационной составляющей вектора скорости
флуктуационной составляющей вектора скорости  результирующего воздушного потока вихревой колонны несущего винта может быть выделен и отфильтрован в каналах системы.
результирующего воздушного потока вихревой колонны несущего винта может быть выделен и отфильтрован в каналах системы.
Тогда в качестве информативного параметра вихревой колонны несущего винта можно использовать вектор скорости  результирующего воздушного потока в виде геометрической суммы вектора скорости ветра
результирующего воздушного потока в виде геометрической суммы вектора скорости ветра  и стационарной составляющей
и стационарной составляющей  вектора скорости воздушного потока, создаваемого несущим винтом, т.е.
вектора скорости воздушного потока, создаваемого несущим винтом, т.е.

Для конкретного типа вертолета и места установки неподвижного пространственно распределенного комбинированного аэрометрического приемника на фюзеляже вертолета составляющие Vix, Viy, Viz вектора  скорости индуктивного потока вихревой колонны несущего винта в связанной системе координат можно описать уравнениями вида (см. статью: Козицин В.К. Алгоритмическое обеспечение системы воздушных сигналов вертолета на основе свободно ориентированного приемника давлений // Известия вузов. Авиационная техника. - 2006. - №4. - С. 52-57. - [10]):
скорости индуктивного потока вихревой колонны несущего винта в связанной системе координат можно описать уравнениями вида (см. статью: Козицин В.К. Алгоритмическое обеспечение системы воздушных сигналов вертолета на основе свободно ориентированного приемника давлений // Известия вузов. Авиационная техника. - 2006. - №4. - С. 52-57. - [10]):

где  - модуль вектора
- модуль вектора  скорости индуктивного потока несущего винта на режиме висения; Kix, Kiy, Kiz - безразмерные коэффициенты, определяемые при наземных испытаниях данного типа вертолета; G - вес вертолета; nу - нормальная перегрузка
скорости индуктивного потока несущего винта на режиме висения; Kix, Kiy, Kiz - безразмерные коэффициенты, определяемые при наземных испытаниях данного типа вертолета; G - вес вертолета; nу - нормальная перегрузка  ρн - плотность воздуха на данной высоте Н; F - площадь, ометаемая несущим винтом вертолета; χ - коэффициент заполнения диска несущего винта; g=9,80665 - ускорение свободного падения.
ρн - плотность воздуха на данной высоте Н; F - площадь, ометаемая несущим винтом вертолета; χ - коэффициент заполнения диска несущего винта; g=9,80665 - ускорение свободного падения.
Величину (модуль) вектора скорости  результирующего воздушного потока вихревой колонны несущего винта можно определить по полному РП∑ и статическому РСТ∑ давлениям и температуре ТТ∑ заторможенного результирующего воздушного потока вихревой колонны несущего винта, воспринимаемой приемником температуры торможения, установленного на фюзеляже в зоне действия вихревой колонны несущего винта, используя соотношение [10]:
результирующего воздушного потока вихревой колонны несущего винта можно определить по полному РП∑ и статическому РСТ∑ давлениям и температуре ТТ∑ заторможенного результирующего воздушного потока вихревой колонны несущего винта, воспринимаемой приемником температуры торможения, установленного на фюзеляже в зоне действия вихревой колонны несущего винта, используя соотношение [10]:
где параметры, входящие в формулу (11), имеют размерности в единицах системы СИ.
Проекции вектора скорости результирующего воздушного потока вихревой колонны несущего на оси связанной системы координат определяются как

где φ1 и φ2 - углы, определяющие положение вектора скорости  результирующего воздушного потока вихревой колонны несущего относительно оси симметрии осесимметричного, например полусферического аэрометрического приемника воздушных давлений, которые определяются по давлениям Р1, Р2 и Р3, Р4.
результирующего воздушного потока вихревой колонны несущего относительно оси симметрии осесимметричного, например полусферического аэрометрического приемника воздушных давлений, которые определяются по давлениям Р1, Р2 и Р3, Р4.
Используя соотношения для определения давления на поверхности полусферического аэрометрического приемника, приведенные (см. книгу: Петунии А.Н. Методы и техника измерения параметров газового потока (Приемники давления и скоростного напора). - М.Машиностроение. - 1972. - 332 с. - [11]), углы φ1 и φ2, определяющие положение вектора скорости  результирующего набегающего воздушного потока вихревой колоны несущего винта, будут определяться соотношениями
результирующего набегающего воздушного потока вихревой колоны несущего винта, будут определяться соотношениями
где φ10 и φ20 - углы расположения отверстий для забора давлений Р1, Р2 и Р3, Р4.
Тогда в соответствии с выражениями (9)-(13) продольная Wx, боковая Wz составляющие, модуль (величина) Wг и направление ψ горизонтального ветра  на стоянке при запуске силовой установки и вращении несущего винта будут определяться как:
на стоянке при запуске силовой установки и вращении несущего винта будут определяться как:
Таким образом, по давлениям Р1, Р2 и Р3, Р4, РП∑ и РСТ∑, воспринимаемым на поверхности осесимметричного, например полусферического аэрометрического приемника, и температуре ТТ∑ торможения результирующего воздушного потока вихревой колонны несущего, используя соотношения (14) можно определить параметры вектора скорости ветра на стоянке при запуске силовой установки и вращении несущего винта.
3. На режиме руления и маневрирования вертолета по земной поверхности в качестве исходного уравнения для определения параметров вектора скорости ветра вместо выражения (9) необходимо использовать соотношение

где  - вектор скорости руления и маневрирования вертолета по земной поверхности, продольная Vрx и боковая Vpz, составляющие которого можно определить, используя информацию от спутниковой навигационной системы, установленной на вертолете.
- вектор скорости руления и маневрирования вертолета по земной поверхности, продольная Vрx и боковая Vpz, составляющие которого можно определить, используя информацию от спутниковой навигационной системы, установленной на вертолете.
Тогда, используя соотношения (10)-(15), выражения для определения продольной Wx и боковой Wz составляющих, и величины (модуля) Wг и направления ψ горизонтального ветра  при рулении и маневрировании по земной поверхности будут иметь вид
при рулении и маневрировании по земной поверхности будут иметь вид

4. На взлетно-посадочных режимах вертолета в качестве исходного уравнения для определения параметров вектора скорости ветра вместо выражения (9) необходимо использовать соотношения вида

где  - вектор истинной воздушной скорости вертолета
- вектор истинной воздушной скорости вертолета
 - вектор путевой скорости вертолета, параметры которого определяются доплеровским измерителем скорости и угла сноса (ДИСС);
- вектор путевой скорости вертолета, параметры которого определяются доплеровским измерителем скорости и угла сноса (ДИСС);  - вектор скорости воздушного потока, набегающего на неподвижный пространственно распределенный комбинированный аэрометрический приемник.
- вектор скорости воздушного потока, набегающего на неподвижный пространственно распределенный комбинированный аэрометрический приемник.
Поскольку неподвижный пространственно распределенный комбинированный аэрометрический приемник расположен на фюзеляже на определенном радиус-векторе  от центра масс вертолета, то при вращении вертолета относительно центра масс имеет место кинематическое искажение вектора скорости
от центра масс вертолета, то при вращении вертолета относительно центра масс имеет место кинематическое искажение вектора скорости  воздушного потока, набегающего на аэрометрический приемник, которое определяется векторным уравнением вида
воздушного потока, набегающего на аэрометрический приемник, которое определяется векторным уравнением вида

где - кинематически искаженный вектор скорости набегающего воздушного потока в месте установки неподвижного комбинированного аэрометрического приемника;
- кинематически искаженный вектор скорости набегающего воздушного потока в месте установки неподвижного комбинированного аэрометрического приемника;  - вектор угловой скорости вращения вертолета относительно центра масс; ωх, ωу, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного комбинированного аэрометрического приемника в связанной системе координат, центр которой находится в центре масс вертолета.
- вектор угловой скорости вращения вертолета относительно центра масс; ωх, ωу, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; х, у, z - координаты места установки неподвижного комбинированного аэрометрического приемника в связанной системе координат, центр которой находится в центре масс вертолета.
Проекции вектора  на оси связанной системы координат будут определяться системой уравнений вида
на оси связанной системы координат будут определяться системой уравнений вида

где Vx, Vy, Vz - проекции вектора истинной воздушной скорости VB на оси связанной системы координат.
Составляющие Vx, Vy, Vz и величина (модуль) вектора истинной воздушной скорости  углы атаки α и скольжения β вертолета, статическое давление РH и барометрическая высота Н будут определяться соотношениями:
углы атаки α и скольжения β вертолета, статическое давление РH и барометрическая высота Н будут определяться соотношениями:

где Р0=101325 Па и T0=288,15 К - абсолютное давление и абсолютная температура воздуха на высоте Н=0 стандартной атмосферы; R - удельная газовая постоянная воздуха (R=287,05287 Дж/кг·K); τ - температурный градиент (τ=0,0065 К/м); Кр - безразмерный коэффициент, определяющий связь РСТ∑ и PН, который определяется при летных испытаниях для конкретного типа вертолета и места установки неподвижного комбинированного аэрометрического приемника на фюзеляже вертолета.
Используя информацию о величине Vn и угле сноса ψс вектора путевой скорости Vn от доплеровского измерителя скорости и угла сноса и составляющих вектора истинной воздушной скорости 


Таким образом, используя информацию неподвижного пространственно распределенного комбинированного аэрометрического приемника, в вычислительном устройстве (микропроцессоре) определяются параметры вектора скорости ветра на стоянке до запуска силовой установки, на стоянке при запуске силовой установки и вращении несущего винта, при рулении и маневрировании по земной поверхности, при взлете, снижении, висении и посадке вертолета. Созданная на его основе бортовая система измерения параметров вектора ветра обладает расширенными функциональными возможностями и областью применения на вертолетах различного класса и назначения.
Применение бортовой системы измерения параметров вектора ветра на вертолетах позволяет повысить безопасность эксплуатации вертолета на стоянке, стартовых и взлетно-посадочных режимах, что имеет существенное значение для авиации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| СТАРТОВАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ ОДНОВИНТОВОГО ВЕРТОЛЕТА | 2012 |
|
RU2497718C1 |
| СИСТЕМА ИЗМЕРЕНИЯ МАЛЫХ ВОЗДУШНЫХ СКОРОСТЕЙ ВЕРТОЛЕТА | 2009 |
|
RU2426995C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА ВЕРТОЛЕТА ПО ВЫСОТНО-СКОРОСТНЫМ ПАРАМЕТРАМ И ПАРАМЕТРАМ ВОЗДУШНОЙ СРЕДЫ, ОКРУЖАЮЩЕЙ ВЕРТОЛЕТ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2730814C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2307357C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2016 |
|
RU2651315C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2011 |
|
RU2518871C2 |
Изобретение относится к области авиационного метеорологического оборудования. Бортовая система измерения параметров вектора скорости ветра содержит неподвижное ветроприемное устройство, преобразователи информативных сигналов, канал аналого-цифрового преобразования, вычислительное устройство, соединенные определенным образом. Ветроприемное устройство содержит неподвижный многоканальный проточный аэрометрический приемник, на наружной поверхности верхнего экранирующего диска которого расположен осесимметричный, например полусферический, аэрометрический приемник с определенным образом расположенными отверстиями. Вычислительное устройство содержит микропроцессор. Обеспечивается определение вектора скорости ветра на стоянке до запуска силовой установки, на стартовых и взолетно-посадочных режимах вертолета. 5 ил.
Бортовая система измерения параметров вектора скорости ветра на стоянке, стартовых и взлетно-посадочных режимах вертолета, содержащая ветроприемное устройство в виде неподвижного многоканального проточного аэрометрического приемника, пневмоэлектрические преобразователи информативных сигналов, канал аналого-цифрового преобразования и вычислительное устройство, отличающаяся тем, что неподвижный многоканальный проточный аэрометрический приемник установлен на фюзеляже в зоне действия вихревой колонны несущего винта и воспринимает давления, определяющие величину и направление вектора скорости ветра на стоянке до запуска силовой установки, на наружной поверхности верхнего экранирующего диска неподвижного многоканального проточного аэрометрического приемника в плоскости, параллельной плоскости симметрии вертолета, установлен осесимметричный, например полусферический, аэрометрический приемник, на оси симметрии осесимметричного аэрометрического приемника расположено отверстие, являющееся приемником полного давления результирующего воздушного потока вихревой колонны несущего винта, в плоскости, параллельной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического, аэрометрического приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии осесимметричного, например полусферического, аэрометрического приемника в плоскости симметрии вертолета, в плоскости, перпендикулярной плоскости симметрии вертолета, под одинаковым углом к оси симметрии осесимметричного, например полусферического, аэрометрического приемника расположены отверстия, являющиеся приемниками давлений, определяющих угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего винта относительно оси симметрии осесимметричного аэрометрического приемника в плоскости, перпендикулярной плоскости симметрии вертолета, при этом пневматические выходы неподвижного многоканального проточного аэрометрического приемника и установленного на нем осесимметричного, например полусферического, аэрометрического приемника соединены со входами пневмоэлектрических преобразователей, выходы которых через канал аналого-цифрового преобразования подключены ко входу вычислительного устройства, которое выполнено в виде микропроцессора, реализующего алгоритмы определения параметров вектора скорости ветра как на стоянке до запуска силовой установки, так и на стартовых и взлетно-посадочных режимах вертолета согласно уравнениям:
1) На режиме стоянки при запуске силовой установки и вращении несущего винта:


2) На режиме руления и маневрирования по земной поверхности:



3) На взлетно-посадочных режимах (взлет, снижение, висение, посадка):







где P1, P2 и P3, P4 - давления, воспринимаемые отверстиями, расположенными на осесимметричном, например полусферическом, аэрометрическом приемнике, под углом φ01 и φ02 к оси симметрии аэрометрического приемника; PΠΣ, PCTΣ, - полное и статическое давления результирующего набегающего воздушного потока вихревой колонны несущего винта, воспринимаемые осесимметричным аэрометрическим приемником; TTΣ - абсолютная температура торможения результирующего воздушного потока вихревой колонны несущего винта, воспринимаемая приемником температуры торможения, установленным на фюзеляже вертолета; ρΣ - плотность результирующего воздушного потока вихревой колонны несущего винта; VΣ - величина (модуль) вектора скорости результирующего воздушного потока вихревой колонны несущего винта; φ1 и φ2 - углы, определяющие угловое положение вектора скорости результирующего воздушного потока вихревой колонны несущего относительно плоскостей, параллельной и перпендикулярной плоскости симметрии вертолета; Vi0 - модуль вектора скорости индуктивного потока несущего винта на режиме висения; Kix, Kiy, Kiz, Kp- безразмерные коэффициенты, определяемые при наземных и летных испытаниях данного типа вертолета; Vpx и Vpz, Vпx и Vпz - продольные и боковые составляющие вектора скорости руления вертолета по земле и вектора путевой скорости вертолета, определяемые установленными на вертолете спутниковой навигационной системой (СНС) и доплеровским измерителем скорости и угла сноса (ДИСС); ωx, ωy, ωz - угловые скорости вращения вертолета относительно осей связанной системы координат; x, у, z - координаты места установки неподвижного многоканального проточного аэрометрического приемника на фюзеляже вертолета; Vx, Vy, Vz, α и β - составляющие и углы направления (угол атаки и скольжения) вектора истинной воздушной скорости вертолета; W, Wx, Wy, ψ - модуль, продольная и боковая составляющие, угол направления вектора скорости ветра в горизонтальной плоскости; Рн, P0=101325 Па и T0=288,15 K - статическое давление на высоте полета H, статическое давление и абсолютная температура воздуха на высоте H=0 в условиях стандартной атмосферы; R=287,05287 Дж/кг·K - удельная газовая постоянная воздуха; τ=0,0065 К/м - температурный градиент.
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2005 |
|
RU2307358C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 2009 |
|
RU2426133C1 |
| СИСТЕМА ВОЗДУШНЫХ СИГНАЛОВ ВЕРТОЛЕТА | 2010 |
|
RU2427844C1 |
| US 4920808 A1, 01.05.1990 | |||
| Приспособление для укрепления деревянных бортов на цилиндрических деревянных стержнях или трубках | 1925 |
|
SU1688A1 |

