Изобретение относится к области авиационной техники и касается определения дисбаланса несущих винтов вертолета.
Известен способ определения дисбаланса несущих винтов вертолета, заключающийся в измерении амплитуд угловых колебаний одного углового перемещения фюзеляжа вертолета и амплитуд линейных колебаний одного линейного перемещения фюзеляжа в центре масс вертолета от дисбаланса винтов и пробных дисбалансов одного винта, вычислении дисбалансов винтов (см. патент России №2194959; 2001 г. - прототип).
При таком способе определяются дисбалансы двух несущих винтов, расположенных только на различных расстояниях по высоте от центра масс вертолета (вертолеты соосной и продольной схем), а в математические выражения для определения дисбалансов винтов в качестве параметров входят эти расстояния, величины которых сами подлежат определению, что снижает достоверность результатов определения дисбалансов.
Задача, решаемая в заявляемом техническом решении, заключается в определении дисбалансов несущих винтов вертолета при осуществлении технического результата - определении дисбалансов несущих винтов при различных и одинаковых расстояниях винтов по высоте от центра масс вертолета (вертолеты соосной, продольной и поперечной схем).
Существенными признаками заявляемого способа определения дисбаланса несущих винтов вертолета, общими с прототипом, являются: измерение амплитуд угловых колебаний фюзеляжа вертолета ϕ относительно продольной оси вертолета от дисбаланса и продольного пробного дисбаланса ΔSХ в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и расположенной в продольной плоскости симметрии вертолета, поперечного пробного дисбаланса ΔSZ в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и перпендикулярной продольной плоскости симметрии вертолета, устанавливаемых поочередно на одном несущем винте при угловом положении Ψ одной и той же лопасти невращающегося несущего винта относительно продольной плоскости симметрии вертолета, вычисление дисбаланса.
Признаками, отличительными от прототипа, являются: пробные дисбалансы ΔSX и ΔSZ устанавливают так же на другом несущем винте, измеряют дополнительно амплитуды угловых колебаний фюзеляжа вертолета α относительно поперечной оси вертолета, а дисбалансы продольные одного S
 ,
,
где обозначено:
 ,
,
αS; ϕS - амплитуды угловых колебаний фюзеляжа вертолета от дисбалансов винтов (24);
αX; ϕX - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса ΔSX винта в первом положении (25);
α-X; ϕ-X - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса -ΔSX винта во втором положении с диаметрально противоположным направлением (26);
αZ ϕZ - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса ΔSZ винта в первом положении (27);
α-Z; ϕ-Z - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса -ΔSZ винта во втором положении с диаметрально противоположным направлением (28).
Совокупность признаков заявляемого изобретения, отличная от прототипа, является необходимой и достаточной для обеспечения технического результата.
Технический результат - определение дисбалансов несущих винтов при различных и одинаковых расстояниях винтов по высоте от центра масс вертолета с применением математических выражений для определения дисбалансов, которые не используют в качестве параметра расстояния по высоте от несущих винтов до центра масс вертолета, реализуется при осуществлении совокупности существенных признаков заявляемого изобретения, причинно-следственная связь между которыми следует из результатов решения дифференциальных уравнений движения (29), представленных математическими выражениями (22), (23).
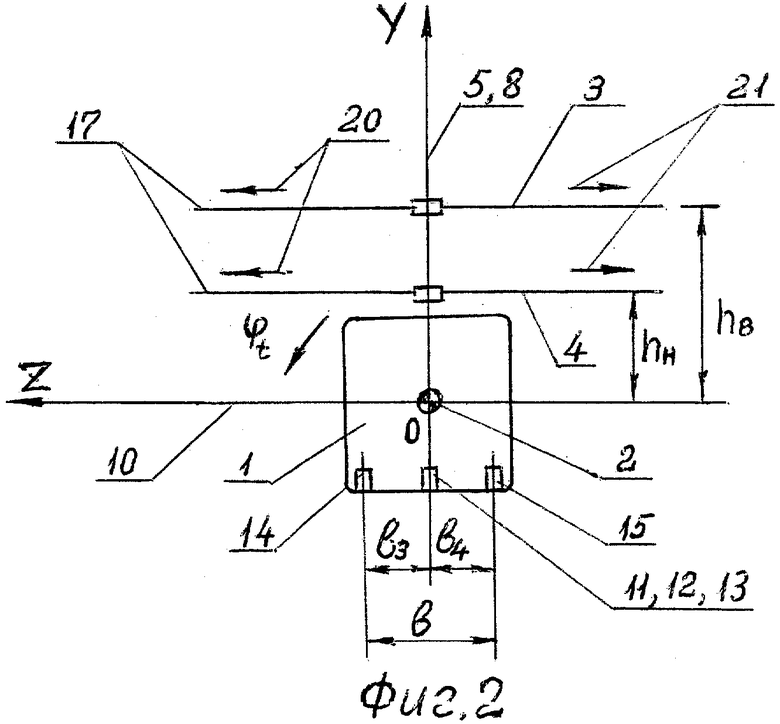
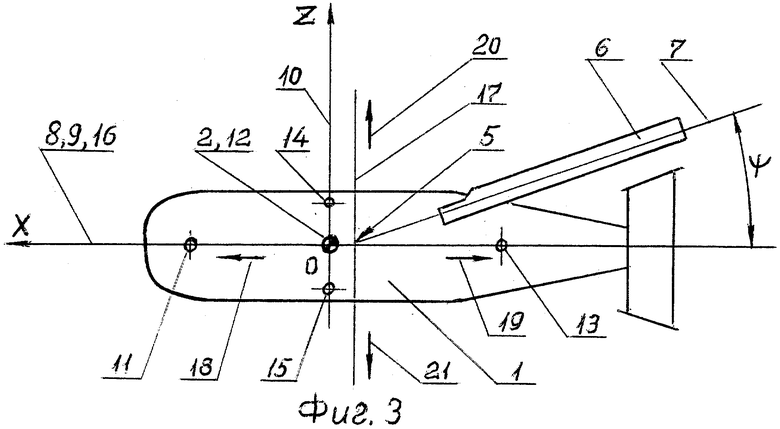
На Фиг.1 представлен вид сбоку на вертолет. Поперечное сечение вертолета при виде спереди показано на Фиг.2. Вид на вертолет сверху показан на Фиг.3.
На фюзеляже 1 вертолета с центром масс 2 закреплены один и другой несущие винты 3,4. Оси вращения винтов 5. На Фиг.1,2,3 показан соосный вертолет, поэтому оси одного и другого винтов совпали. У вертолета продольной схемы оси одного и другого винтов разнесены по длине фюзеляжа в продольном направлении и не совпадают. У вертолета поперечной схемы оси одного и другого винтов также не совпадают, поскольку разнесены в поперечном направлении. Для заявляемого способа определения дисбаланса несущих винтов, закрепленных на вертолете на любой высоте, их размещение на вертолете не имеет значения. Лопасть 6 с осью 7 невращающегося несущего винта расположена под углом Ψ с продольной плоскостью симметрии 8 вертолета. На фигурах показана система координат OXYZ, связанная с вертолетом с началом в центре масс 2. Ось OY параллельна оси 5. Продольная ось 9 вертолета находится в продольной плоскости симметрии 8 вертолета и совпадает с осью ОХ; поперечная ось 10 вертолета совпадает с осью OZ. Оси чувствительности вибродатчиков 11,12,13 лежат в плоскости XOY, при этом ось чувствительности вибродатчика 12 проходит через центр масс 2. Оси чувствительности вибродатчиков 14,15 лежат в плоскости ZOY. Амплитуды перемещений фюзеляжа по вибродатчикам 11 и 13 обозначены соответственно y1 и y2, а по вибродатчику 12 - y0. Амплитуды перемещений фюзеляжа 14 и 15 обозначены соответственно y3 и y4. Угловые перемещения вертолета вокруг оси OZ обозначены αt, угловые перемещения вертолета вокруг оси ОХ - ϕt. Расстояния от центра масс 2 до одного и другого винтов 3,4 обозначены соответственно hв и hн. Расстояния от вибродатчиков 11 и 13 до центра масс 2 обозначены соответственно а1 и a2, а расстояние между вибродатчиками 11 и 13 - а. Расстояния от вибродатчиков 14 и 15 до центра масс 2 обозначены соответственно в3 и в4, а расстояние между вибродатчиками 14 и 15 - в.
Прямая 16 проходит через ось вращения винта 5, пенпендикулярна ей и расположена в продольной плоскости симметрии 8 вертолета. Прямая 17 проходит через ось вращения винта 5 и перпендикулярна плоскости симметрии 8 вертолета. Один продольный пробный дисбаланс несущего винта ΔSX устанавливают на прямой 16 в первом положении 18 (ΔSX) и во втором положении с диаметрально противоположным направлением 19 (-ΔSX). Другой поперечный пробный дисбаланс несущего винта ΔSZ устанавливают на прямой 17 в первом положении 20 (ΔSZ) и во втором положении с диаметрально противоположным направлением 21 (-ΔSZ). При виде на вертолет спереди и сбоку прямые 16 и 17, положения пробных дисбалансов 18,19 и 20,21 показаны как на одном, так и на другом несущих винтах.
Способ определения дисбаланса несущих винтов вертолета реализуется следующим образом. Измеряют амплитуды колебаний y0,S; y1,S; y2,S; y3,S; y4,S фюзеляжа 1 вертолета на частоте ω ращения несущих винтов 3 и 4 при дисбалансах: продольных одного S
Прервав полет вертолета, устанавливают одну из лопастей другого винта 4 в угловом положении ψ и на этом винте производят установку пробных дисбалансов и измерение вибраций в полете в той же последовательности, что и на винте 3.
Вычисление собственно дисбаланса несущих винтов: продольных S
Возможность осуществления технического решения следует из описания последовательности его реализации и следует из решения дифференциальных уравнений угловых перемещений вертолета вокруг осей OZ и ОХ:
 ,
,
где: Jα - момент инерции вертолета относительно оси OZ;
Jϕ - момент инерции вертолета относительно оси ОХ.
Перемещения вертолета являются гармоническими с частотой вращения несущих винтов ω и происходят от дисбалансов винтов S
В свою очередь, амплитуды угловых колебаний вертолета связаны с амплитудами его линейных колебаний следующим образом:

где: j=s; х; -х; z; -z.
В результате реализации заявляемого технического решения осуществляется определение дисбалансов несущих винтов и последующее их устранение - балансировка несущих винтов вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2001 |
|
RU2194959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС ВЕРТОЛЕТА | 2003 |
|
RU2241637C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОНСТРУКЦИИ | 1991 |
|
RU2034255C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ИЗДЕЛИЯ | 1999 |
|
RU2164671C1 |
| ВЕРТОЛЕТ | 2006 |
|
RU2309873C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2592705C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| Беспилотный вертолет для внесения пестицидов, удобрений и других агрохимикатов в точном земледелии | 2021 |
|
RU2754790C1 |
Изобретение относится к испытательной технике. Сущность: измеряют амплитуды угловых колебаний фюзеляжа вертолета ϕ относительно продольной оси вертолета от дисбаланса и продольного пробного дисбаланса ΔSX в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и расположенной в продольной плоскости симметрии вертолета, поперечного подобного дисбаланса ΔSZ в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и перпиндикулярной продольной плоскости симметрии вертолета, устанавливаемых поочередно на одном несущем винте при угловом положении ψ одной и той же лопасти невращающегося несущего винта относительно продольной плоскости симметрии вертолета. Вычисляют дисбаланс. Пробные дисбалансы ΔSX и ΔSZ устанавливают так же на другом несущем винте, измеряют дополнительно амплитуды угловых колебаний фюзеляжа вертолета α относительно поперечной оси вертолета, а дисбалансы продольного одного S

Способ определения дисбаланса несущих винтов вертолета, заключающийся в измерении амплитуд угловых колебаний фюзеляжа вертолета ϕ относительно продольной оси вертолета от дисбаланса и продольного пробного дисбаланса ΔSх в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и расположенной в продольной плоскости симметрии вертолета, поперечного пробного дисбаланса ΔSz в двух диаметрально противоположных положениях относительно оси вращения винта по прямой, проходящей через ось вращения винта и перпендикулярной продольной плоскости симметрии вертолета, устанавливаемых поочередно на одном несущем винте при угловом положении ψ одной и той же лопасти невращающегося несущего винта относительно продольной плоскости симметрии вертолета, вычислении дисбаланса, отличающийся тем, что пробные дисбалансы ΔSx и ΔSz устанавливают также на другом несущем винте, измеряют дополнительно амплитуды угловых колебаний фюзеляжа вертолета α относительно поперечной оси вертолета, а дисбалансы продольного одного  другого
другого  несущих винтов и поперечные одного
несущих винтов и поперечные одного  другого
другого  несущих винтов вычисляют по математическим выражениям
несущих винтов вычисляют по математическим выражениям 

где αS; ϕS - амплитуды угловых колебаний фюзеляжа вертолета от дисбалансов винтов;
αX; ϕX - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса ΔSX винта в первом положении;
α-X; ϕ-X - амплитуды угловых колебаний фюзеляжа вертолета от продольного дополнительного дисбаланса -ΔSX винта во втором положении с диаметрально противоположным направлением;
αZ; ϕZ - амплитуды угловых колебаний фюзеляжа вертолета от поперечного дополнительного дисбаланса ΔSZ винта в первом положении;
α-Z; ϕ-Z - амплитуды угловых колебаний фюзеляжа вертолета от поперечного дополнительного дисбаланса -ΔSZ винта во втором положении с диаметрально противоположным направлением.
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2001 |
|
RU2194959C1 |
| СПОСОБ ЧАСТОТНЫХ ИСПЫТАНИЙ ЛОПАСТИ ВИНТА ВЕРТОЛЕТА | 1994 |
|
RU2077808C1 |
| 0 |
|
SU281178A1 | |
| Способ изготовления ротора с короткозамкнутой обмоткой | 1981 |
|
SU1020927A1 |

