Изобретение относится к области авиационной техники и касается способа определения положения центра масс вертолета.
Известен способ определения положения центра масс вертолета, заключающийся в возбуждении колебаний конструкции с частотой вращения несущих винтов поочередной установкой на верхнем и нижнем винтах по одному дисбалансному грузу, измерении параметров колебаний на режиме висения и определении положения центра масс вертолета по математическому выражению (см. патент России №2034255, 1991 - прототип).
При таком способе положение центра масс вертолета определяют только для вертолета со сбалансированными несущими винтами. Однако на вертолете и после его балансировки имеются дисбалансы несущих винтов. Наличие существующих дисбалансов несущих винтов вертолета не позволяет получить достоверное положение центра масс вертолета.
Задача, решаемая в заявляемом техническом решении, заключается в определении положения центра масс вертолета при существующих дисбалансах несущих винтов и осуществлении технического результата - повышении достоверности определения положения центра масс вертолета.
Существенные признаки заявляемого способа определения положения центра масс вертолета, общие с прототипом, следующие: возбуждают колебания конструкции с частотой вращения несущих винтов поочередной установкой на верхнем и нижнем винтах по одному дисбаланскому грузу, измеряют параметры колебаний на режиме висения и по результатам измерений судят о положении центра масс вертолета.
Признаками, отличными от прототипа, являются: на каждом несущем винте дисбалансный груз поочередно устанавливают второй раз в диаметрально противоположном положении относительно оси вращения верхнего и нижнего несущих винтов, измеряют амплитуды угловых колебаний вертолета
αS - без дисбалансных грузов на несущих винтах,
αB; αн - с дисбалансным грузом в первом положении соответственно на верхнем и нижнем несущих винтах,
αB; αн - с дисбалансным грузом во втором положении с диаметрально противоположным направлением соответственно на верхнем и нижнем несущих винтах
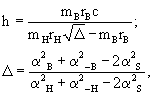
и расстояние h от нижнего винта до центра масс вертолета определяют по математическим выражениям


где mB, mH - масса дисбалансного груза соответственно верхнего и нижнего несущих винтов;
rB, rH - расстояние от оси вращения винта до дисбалансного груза соответственно верхнего и нижнего несущих винтов;
c - расстояние между верхним и нижним несущими винтами.
Совокупность признаков заявляемого изобретения является необходимой и достаточной для обеспечения технического результата.
Технический результат - повышение достоверности определения положения центра масс вертолета реализуется при осуществлении совокупности существенных признаков заявляемого изобретения, причинно-следственная связь между которыми следует из результатов решения дифференциального уравнения, представленных математическими выражениями.
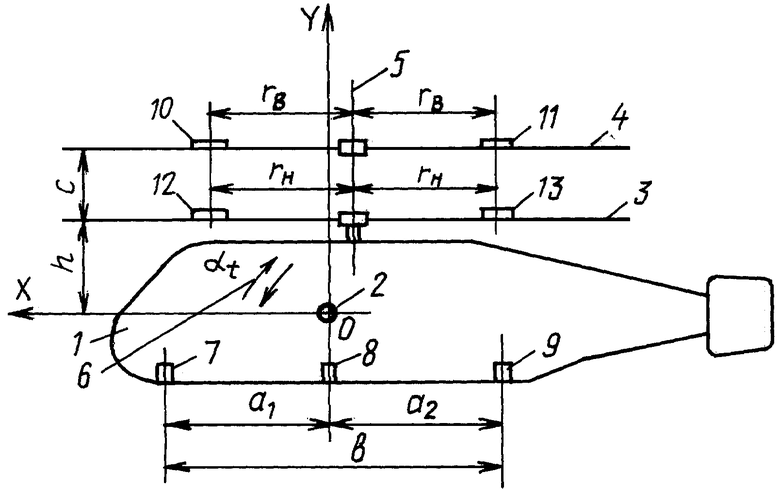
На чертеже представлен вид сбоку на вертолет.
На фюзеляже 1 вертолета с центром масс 2 закреплены нижний 3 и верхний 4 несущие винты. Ось вращения винтов 5. На чертеже показан соосный вертолет, поэтому оси нижнего и верхнего винтов совпадают. У продольного вертолета оси нижнего и верхнего винтов разнесены по длине фюзеляжа и не совпадают. Для заявляемое способа определения положения центра масс вертолета с двумя несущими винтами, закрепленными на фюзеляже на различной высоте, их размещение по длине фюзеляжа не имеет значения. На чертеже показана система координат ОХY, связанная с вертолетом с началом в центре масс 2 и осью ОYУ, параллельной оси 5. Угловые перемещения вертолета 6 обозначены αt. Оси чувствительности вибродатчиков 7, 8, 9 лежат в плоскости ХОY, в которой находится и центр масс 2, а ось чувствительности вибродатчика 8 проходит через центр масс 2. Амплитуды вертикальных вибраций вертолета по вибродатчикам 7 и 9 обозначены соответственно у1 и у2, a по вибродатчику 8 – у0. Расстояние от центра масс 2 до нижнего винта 3 обозначено h, расстояние между винтами 3 и 4 - с. Расстояние от вибродатчика 7 до центра масс 2 обозначено α1; от вибродатчика 9 до центра масс 2 - α2; расстояние между вибродатчиками 7 и 9 - в. Дисбалансный груз верхнего несущего винта с массой mB и расстоянием rB до оси вращения винта 5 устанавливают в первом положении 10 (+mBrB) и во втором положении 11 (-mBrB) с диаметрально противоположным направлением относительно оси вращения 5. Дисбалансный груз нижнего несущего винта с массой mH и расстоянием rH до оси вращения винта 5 устанавливают в первом положении 12 (+mHrH) и во втором положении 13 (-mHrH) с диаметрально противоположным направлением относительно оси вращения винта 5.
Способ определения положения центра масс вертолета реализуется следующим образом. По вибродатчикам 7, 8, 9 измеряют амплитуды колебаний фюзеляжа 1 вертолета на частоте вращения несущих винтов 3 и 4 при полете вертолета на режиме висения без дисбалансных грузов на несущих винтах. Затем, прервав полет вертолета, устанавливают на одном винте (на верхном) дисбалансный груз с массой mB в первом положении 10 (+mBrB) и измеряют амплитуды колебаний вертолета на режиме висения. Прервав полет, снимают дисбалансный груз с позиции 10, устанавливают его во втором положении 11 (-mBrB) с диаметрально противоположным направлением относительно оси вращения 5 и измеряют амплитуды колебаний вертолета на режиме висения. Прерывают полет и снимают дисбалансный груз с верхнего винта, позиция 11. Устанавливают на другой винт (на нижний) дисбалансный груз с массой mH в первом положении 12 (+mBrH) и измеряют амплитуды колебаний вертолета на режиме висения. Прервав полет, снимают дисбалансный груз с позиции 12, устанавливают его во втором положении 13 (-mHrH) с диаметрально противоположным направлением относительно оси вращения 5 и измеряют амплитуды колебаний вертолета на режиме висения. По результатам измерений определяют по математическим выражениям (14), (15) расстояние от нижнего винта до центра масс вертолета. При этом амплитуды угловых колебаний вертолета вычисляют по математической формуле (20).
Возможность осуществления технического решения следует из описания последовательности его реализации и следует из решения дифференциального уравнения угловых колебаний вертолета

где J - момент инерции вертолета;
SB, SH - существующий дисбаланс соответственно верхнего и нижнего несущих винтов;
ψB, ψH - фаза между существующим дисбалансом и дисбалансом в первом положении соответственно верхнего и нижнего несущих винтов;
ω - частота вращения несущих винтов.
Перемещения вертолета являются гармоническими и происходят с амплитудами угловых колебаний:
αS - без дисбалансных грузов на несущих винтах (17);
αB, αH - с дисбалансным грузом в первом положении соответственно на верхнем и нижнем несущих винтах..... (18);
α-B, α-H - с дисбалансным грузом во втором положении с диаметрально противоположным направлением соответственно на верхнем и нижнем несущих винтах....(19).
В результате решения уравнения (16) для случаев (17), (18), (19) получаем математические выражения (14), (15) для вычисления расстояния от нижнего винта до центра масс вертолета. В свою очередь, амплитуда углового колебания вертолета связана с амплитудами его линейных колебаний следующим образом:

где j=S; в; -в; н; -н.
В результате реализации заявляемого технического решения осуществляется определение положения центра масс вертолета.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОНСТРУКЦИИ | 1991 |
|
RU2034255C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2001 |
|
RU2194959C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИСБАЛАНСА НЕСУЩИХ ВИНТОВ ВЕРТОЛЕТА | 2003 |
|
RU2247344C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ИНЕРЦИИ ИЗДЕЛИЯ | 1999 |
|
RU2164671C1 |
| СПОСОБ КОНТРОЛЯ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ НЕСУЩЕГО И РУЛЕВОГО ВИНТОВ ВЕРТОЛЕТА | 2016 |
|
RU2628034C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ТОЧКИ ПРИЛОЖЕНИЯ ВНЕШНИХ СИЛ ВЕРТОЛЕТА | 1991 |
|
RU2033941C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| МНОГОЦЕЛЕВОЙ МНОГОВИНТОВОЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2016 |
|
RU2629483C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
Изобретение относится к области авиационной техники и касается способа определения положения центра масс вертолета с несущими винтами, установленными на фюзеляже на различной высоте. Последовательно измеряют амплитуды колебаний фюзеляжа вертолета на режиме висения без дисбалансных грузов, а также с поочередно устанавливаемыми на каждом несущем винте дисбалансными грузами, затем по определенным математическим зависимостям определяют положение центра масс вертолета. Изобретение позволяет повысить достоверность определения положения центра масс вертолета, а именно определить расстояние по вертикали от нижнего несущего винта до центра масс вертолета. 1 ил.
Способ определения положения центра масс вертолета, преимущественно вертолета с несущими винтами, закрепленными на фюзеляже на различной высоте, заключающийся в возбуждении колебаний конструкции с частотой вращения несущих винтов поочередной установкой на верхнем и нижнем винтах по одному дисбалансному грузу, измерении параметров колебаний на режиме висения и определении положения центра масс вертолета по математическому выражению, отличающийся тем, что на каждом несущем винте дисбалансный груз поочередно устанавливают второй раз в диаметрально противоположном положении относительно оси вращения верхнего и нижнего несущих винтов, измеряют амплитуды угловых колебаний вертолета: αS - без дисбалансных грузов на несущих винтах; αB, αH - с дисбалансным грузом в первом положении соответственно на верхнем и нижнем несущих винтах; α-B, α-H - c дисбалансным грузом во втором положении с диаметрально противоположным направлением соответственно на верхнем и нижних несущих винтах, и расстояние h от нижнего винта до центра масс вертолета определяют по математическим выражениям
где mв, mн - масса дисбалансного груза соответственно верхнего и нижнего несущих винтов;
rв; rн - расстояние от оси вращения винта до дисбалансного груза соответственно верхнего и нижнего несущих винтов;
c - расстояние между верхним и нижним несущими винтами.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЦЕНТРА МАСС КОНСТРУКЦИИ | 1991 |
|
RU2034255C1 |
| Способ определения координаты центра тяжести тела | 1983 |
|
SU1170302A1 |
| US 4691567 A, 08.09.1987 | |||
| US 1774718 A, 02.09.1930. | |||

