Изобретение относится к радиотехнике и может быть использовано в приемо-передающей аппаратуре связи и радиолокации, в частности в антенных системах метеолокаторов для сопровождения аэрологических радиозондов (АРЗ) и метеорологических ракет.
Общеизвестна поляризация электромагнитных волн, у которых направления электрического (Е) и магнитного (Н) полей сохраняются неизменными в пространстве или изменяются по определенному закону. Строго монохроматическое излучение всегда поляризовано. Для поляризованного излучения различают линейную, круговую и эллиптическую. В антенных системах применяют поляризацию в зависимости от конкретной задачи, поставленной перед данной PЛC, т.к. каждый тип поляризации обладает определенными достоинствами и недостатками (с точки зрения обнаружения, захвата и сопровождения цели в конкретных условиях применения).
Так, в РЛС с антенной системой с линейной поляризацией в случае ошибки сопровождения появляются перекрестные связи, например, в случае ошибки по азимуту появляется сигнал на выходе детектора ошибки по углу места и наоборот. В отдельных случаях перекрестная связь может обусловить значительную ошибку сопровождения и даже потерю цели при сопровождении, см. "Справочник по радиолокации", ред. М.Скольник, том 4, Сов. Радио, 1977 г., стр. 63-64.
Известны антенные системы с круговой поляризацией, в которых антенная решетка выполнена в виде спирали с согласованным резонатором, см. "Справочник по радиолокации", ред. М.Скольник, том 2, Сов. Радио, 1977 г., стр.137.
Недостатком такой системы является следующее: при однократном отражении от цели круговая поляризация сигнала меняется на обратную, следовательно, требуются раздельные излучающая и приемная решетки спиральных элементов (с противоположным направлением витков спирали), конструкция усложняется, увеличиваются габаритно-массовые характеристики (ГМХ), уменьшается надежность и увеличивается стоимость. Кроме того, как показывает практика, при круговой поляризации сигнал цели ослабляется на 6-8 дБ. Это явление при наблюдении цели при дожде дает общий выигрыш в отношении сигнал/помеха 15-18 дБ, но при малоразмерных целях это достоинство превращается в недостаток, т.к. полезный сигнал также уменьшается, см. "Теоретические основы радиолокации", ред. В.Е. Дулевич, М., Сов. Радио, 1978 г., стр. 487-489.
Известна "Антенная система метеолокатора", которая содержит четырехсегментную большую антенную решетку, малую антенную решетку, две диаграммообразующие схемы, приемопередатчик и микропроцессор, причем каждый сегмент содержит решетку из двенадцати излучателей, расположенных в четыре ряда и в четыре этажа, выход каждого сегмента соединен с соответствующим входом/выходом первой диаграммообразующей схемы, малая антенная решетка содержит четыре одиночных излучателя, расположенных в центре четырехсегментной антенной решетки, а выход каждого одиночного излучателя соединен с соответствующим входом второй диаграммообразующей схемы, входы/выходы обеих диаграммообразующих схем соединены с соответствующими входами/выходами приемопередатчика, управляющие выходы микропроцессора соединены с управляющими входами диаграммо-образующих схем и приемопередатчика, выход последнего является выходом системы, см. положительное решение о выдаче патента РФ на заявку 2000107716/09 (008080) с описанием заявки - ПРОТОТИП.
Недостатком данной антенной системы является следующее: при малой дальности (высоте) до аэрологического радиозонда АРЗ антенна последнего (совместно с корпусом АРЗ) при сильных порывах ветра, меняющихся ветровых потоках, вихрях (особенно в условиях Арктики, высокогорья) значительно меняет свое пространственное положение (колеблется из стороны в сторону, даже ложится на "бок") вплоть до 90o, т.е. меняет свою ориентацию. В результате вертикальная поляризация изменяется на горизонтальную, метео-РЛС может потерять цель (АРЗ) по угловым координатам со всеми вытекающими отсюда последствиями.
Собственно говоря, этот недостаток относится ко всей системе: метеорологическая РЛС - аэрологический зонд, если бы последний не "болтался", то не было бы и потери цели (АРЗ).
Дополнительно следует заметить, что в этом случае колебаний - "болтанке" до 90o получается нулевая поляризация цели, при которой передающая с АРЗ волна поляризована ортогонально ориентации приемной антенны, в результате передающая волна ортогональна по отношению к поляризации антенны; антенна не может принять такой сигнал или принимает с такими искажениями, что полезная информация близка к нулю.
Технической задачей изобретения является повышение эффективности и надежности сопровождения АРЗ, особенно на малых высотах при экстремальных погодных условиях, за счет улучшения согласовывания поляризационных характеристик антенны АРЗ и антенной системы метео-РЛС.
Для решения поставленной задачи предлагается антенная система метеолокатора с линейной и круговой поляризацией, содержащая первую и вторую диаграммообразующие схемы, большую и малую антенные решетки, излучатели которых соединены с соответствующими выходами второй и первой диаграммообразующих схем соответственно, приемопередатчик, микропроцессор, выход которого соединен с управляющими входами приемопередатчика и обеих диаграммообразующих схем, отличающаяся тем, что в нее введен трехдецибельный квадратурный мост, включенный между приемопередатчиком и кольцевыми делителями мощности первой диаграммообразующей схемы, при этом малая антенная решетка состоит из четырех диполей, расположенных ромбом в центре большой антенной решетки, а точки возбуждения этих диполей соединены с выходами первой диаграммообразующей схемы таким образом, что первый и второй диполи образуют линейку горизонтальной составляющей круговой поляризации, а третий и четвертый - вертикальной.
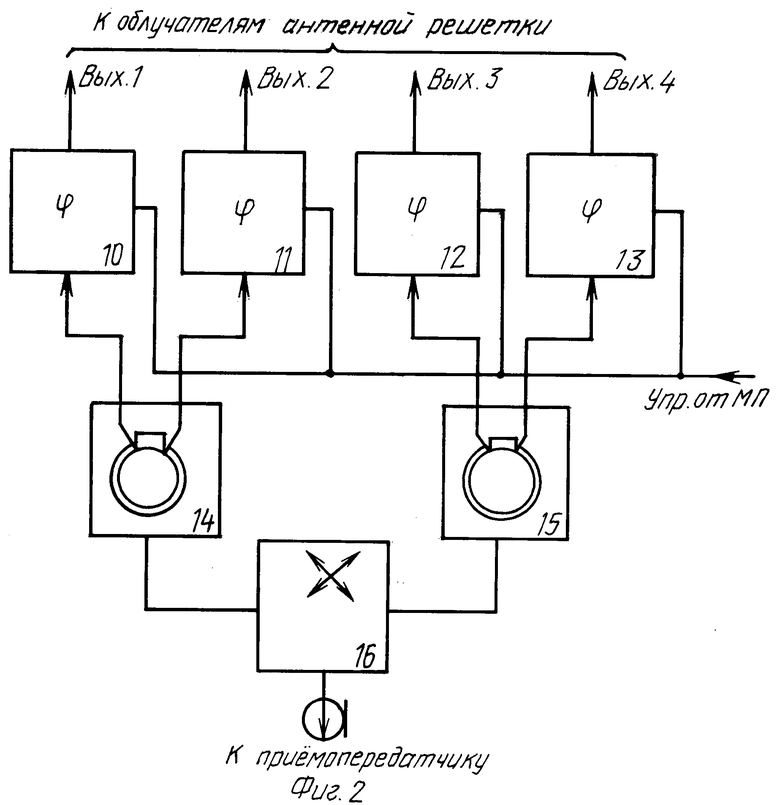
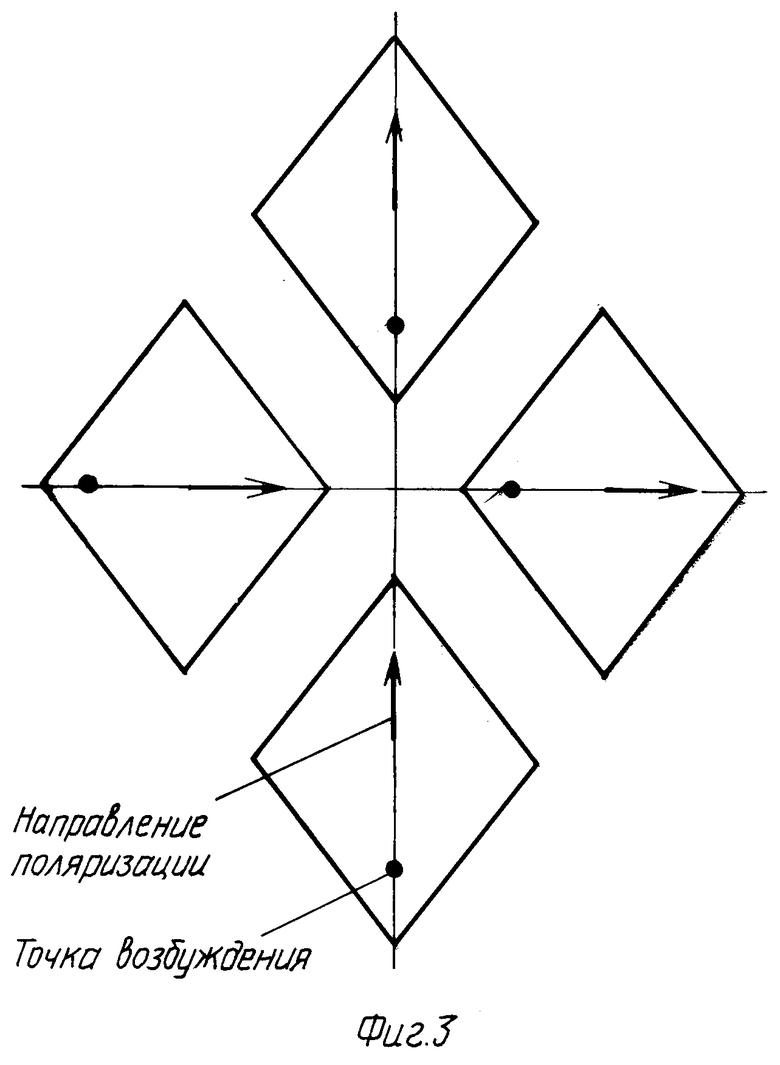
На фиг.1 изображена структурная электрическая схема антенной системы, на фиг. 2 - диаграммообразующие схемы, на фиг.3 - расположение диполей малой антенной решетки.
На схемах изображено:
1-4 - сегменты большой антенной решетки (БАР), 5 - малая антенная решетка, 6 и 7 - первая и вторая диаграммообразующие схемы соответственно, 8 - приемопередатчик, 9 - микропроцессор, 10-13 - фазовращатели, 14-15 - кольцевые делители мощности, 16 - трехдецибельный квадратурный мост, (5-1)-(5-2) - линейка диполей горизонтальной составляющей круговой поляризации MAP, (5-3)-(5-4) - вертикальной составляющей MAP.
Указанные узлы и блоки представляют собой и могут быть выполнены:
Излучатели большой и малой антенных решеток 1-5 могут быть выполнены, например, в виде квадратных печатных излучателей с согласованным выходным сопротивлением 50 Ом (см. "Антенны и устройства СВЧ", под ред. Д.И.Воскресенского, М., "Радио и связь", 1994 г, стр. 166-168. МП 9 может быть применен типа 80С196КС, см. каталог фирмы Jntel "EMBEDDED MICROCONTROLLERS and PROCESSORS" volumel, 1993, 17-1. Фазовращатели 10-13 (из ДОС 6 и 7) могут быть выполнены, например, на pin-диодах (см. "Справочник по радиолокации", М. , Сов. радио, 1977 г., стр. 251-259). Кольцевые делители мощности 14 и 15 (также из ДОС 6 и 7) могут быть выполнены, например, по схеме кольцевых мостов (см. "Антенны и устройства СВЧ", под ред. Д.И.Воскресенского, М., "Радио и связь", 1994 г., стр. 301, 302, 306). Приемопередатчик 8 может быть выполнен, например, по схеме (см. А.А.Ефимов "Принципы работы аэрологического информационно-вычислительного комплекса АВК-1", М., Гидрометеоиздат, 1989 г. , стр. 19, 20) и по схеме (см. Л.Г.Гассанов и др. "Твердотельные устройства СВЧ в технике связи", М., Радио и связь, 1988 г., стр. 156-158).
Трехдецибельный квадратурный мост может быть выполнен по схеме (см. "Справочник по радиолокации", ред. М.Скольник, том 2, Сов. Радио, 1977 г., стр. 22-23).
Антенная система метеолокатора работает следующим образом. Рассмотрим на примере передачи, т.к. в силу "принципа обратимости" характеристики антенной системы остаются неизменными и в режиме приема.
Т.к. в метеолокаторах требуется обнаружение (пеленгация) и сопровождение цели (АРЗ), то применяется равносигнальный метод, для чего применяется сканирование электрическим способом, при котором перемещение ДН осуществляется за счет амплитудно-фазового распределения в раскрыве антенны электрическим путем, т. е. управление максимумом ДН осуществляется изменением сдвига фаз между токами соседних излучателей. В режиме передачи для обеспечения максимальной мощности облучения цели (АРЗ) подаются одинаковые сигналы на все четыре сегмента БАР 1-4.
В данном метеолокаторе применены два режима работы: режим малой дальности до 1 км и основной режим свыше 1 км до максимальной дальности полета АРЗ. При обоих режимах на передачу всегда работают сегменты БАР 1-4, а на прием: при режиме малой дальности - только MAP 5, а при основном режиме - БАР 1-4 и MAP 5.
Метеолокатор находится от места запуска АРЗ в нескольких десятках метров и его антенна по азимуту и углу места юстирована на точку запуска. В MAP 5 применена круговая поляризация, за счет изменения ориентации излучателей MAP 5 получается пространственная квадратура (поворот векторов в пространстве относительно друг друга) и формируется широкая диаграмма направленности, что позволяет отслеживать АРЗ, даже летящий по ветру в сторону метеолокатора и пролетающий непосредственно над ним в единицах метров и совершающий под воздействием ветра ширококолебательные движения корпуса вместе с антенной до ±90o от вертикали.
Ослабление сигнала при этом на 3-8 дБ не влияет на качество приема, т.к. сигнал на малых дальностях (высоте) достаточно сильный и его ослабление практически не сказывается. На дальностях до АРЗ более 1 км работают БАР 4 с линейной поляризацией и MAP 5 с круговой поляризацией, что вполне обеспечивает устойчивый режим работы, т.к. и колебания антенны АРЗ значительно меньше и эффективность БАР 4 на этих дальностях значительно выше. Работа всей антенной системы синхронизирована с МП 9 (синхросигнал), связи синхросигнала с элементами схемы условно не показаны.
Применение данной антенной системы метеолокатора позволяет значительно повысить точность и динамику сопровождения, особенно на малых дальностях, при значительном снижении габаритно-массовых характеристик самой антенны, а следовательно, выполняется один из основных постулатов современной техники: "стоимость-эффективность". Так, размеры предлагаемой ФАР в полтора раза меньше параболической антенны, а вес - в два раза меньше. Эффективность же заключается в том, что предлагаемый метеолокатор не теряет цель (АРЗ) при малых дальностях и, что особенно важно, при одновременном движении АРЗ с большой угловой скоростью до 30 град./с и при значительном колебании его относительно вертикали до ±90o. С учетом этой особенности данная антенная система может найти применение в РЛС для обнаружения, захвата и сопровождения быстродвижущихся малоразмерных целей на малых высотах, например крылатых ракет, беспилотных самолетов-разведчиков над полем боя и для наведения зенитных ракет (на начальном участке).
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТЕННАЯ СИСТЕМА МЕТЕОЛОКАТОРА | 2000 |
|
RU2161847C1 |
| АНТЕННА МЕТЕОРАДИОЛОКАТОРА КРУГОВОЙ ПОЛЯРИЗАЦИИ | 2017 |
|
RU2670235C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| СПОСОБ СТАБИЛИЗАЦИИ УРОВНЯ СИГНАЛА НА ВХОДЕ АВТОДИННОГО АСИНХРОННОГО ПРИЕМОПЕРЕДАТЧИКА СИСТЕМЫ РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2023 |
|
RU2808230C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| СПОСОБ ПЕРЕДАЧИ КОМАНД УПРАВЛЕНИЯ НА БОРТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2804516C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА (АРЗ) | 2001 |
|
RU2199764C1 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ГОМОДИННЫМ ПРИЕМОПЕРЕДАТЧИКОМ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2024 |
|
RU2829602C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
Изобретение относится к радиотехнике и может быть использовано в приемопередающей аппаратуре связи и радиолокации, в частности в антенных системах метеолокаторов для сопровождения аэрологических радиозондов (АРЗ) и метеорологических ракет. Техническим результатом является повышение эффективности и надежности сопровождения АРЗ, особенно на малых высотах при экстремальных погодных условиях за счет улучшения согласовывания поляризационных характеристик антенны АРЗ и антенной системы метео-РЛС. Для решения поставленной задачи предлагается антенная система метеолокатора с линейной и круговой поляризацией, содержащая первую и вторую диаграммообразующие схемы, большую и малую антенные решетки, излучатели которых соединены с соответствующими выходами второй и первой диаграммообразующих схем соответственно, приемопередатчик, микропроцессор, выход которого соединен с управляющими входами приемопередатчика и обеих диаграммообразующих схем, отличающаяся тем, что в нее введен трехдецибельный квадратурный мост, включенный между приемопередатчиком и кольцевыми делителями мощности первой диаграммообразующей схемы, при этом малая антенная решетка состоит из четырех диполей, расположенных ромбом в центре большой антенной решетки, а точки возбуждения этих диполей соединены с выходами первой диаграммообразующей схемы таким образом, что первый и второй диполи образуют линейку горизонтальной составляющей круговой поляризации, а третий и четвертый - вертикальной. 3 ил.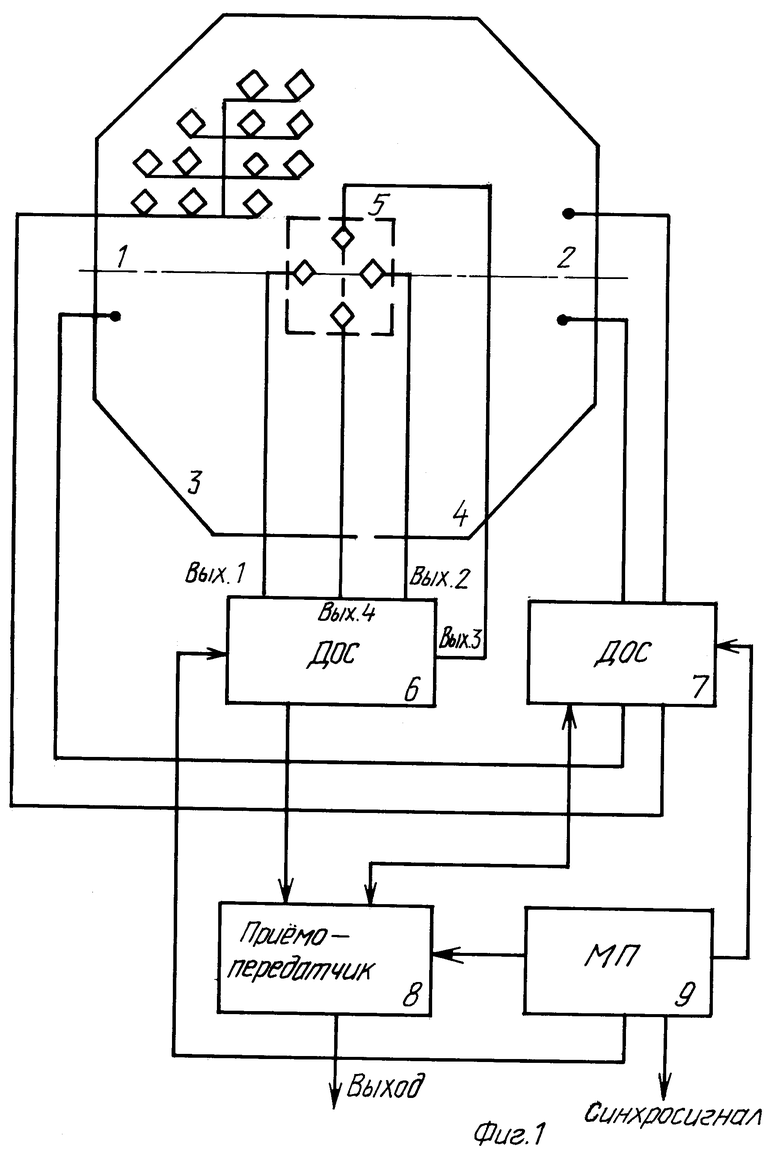
Антенная система метеолокатора с линейной и круговой поляризацией, содержащая большую и малую антенные решетки, излучатели которых соединены с соответствующими выходами второй и первой диаграммообразующих схем соответственно, приемопередатчик, микропроцессор, выход которого соединен с управляющими входами приемопередатчика и обеих диаграммообразующих схем, отличающаяся тем, что в нее введен трехдецибельный квадратурный мост, включенный между приемопередатчиком и кольцевыми делителями мощности первой диаграммообразующей схемы, при этом малая антенная решетка состоит из четырех диполей, расположенных ромбом в центре большой антенной решетки, а точки возбуждения этих диполей соединены с выходами первой диаграммообразующей схемы таким образом, что первый и второй диполи образуют линейку горизонтальной составляющей круговой поляризации, а третий и четвертый - вертикальной.
| АНТЕННАЯ СИСТЕМА МЕТЕОЛОКАТОРА | 2000 |
|
RU2161847C1 |
| Преобразователь угла поворота вала в напряжение постоянного тока | 1982 |
|
SU1037306A2 |
| US 5652597 A, 29.07.1997 | |||
| US 4647933 А, 03.03.1987 | |||
| US 6057802 А, 02.05.2000. | |||

