Изобретение относится к радиолокации и может быть использовано для измерения координат аэрологических радиозондов (АРЗ), а именно углов места и азимута, дальности до АРЗ и вычисления его высоты полета и географических координат, также может быть использовано, например, в аэродромных РЛС с предварительным запуском АРЗ и с дальнейшим использованием полученных метеовеличин при определении координат целей (самолетов).
В настоящее время в аэрологических вычислительных комплексах измерение всех координат АРЗ происходит классическим образом: углы места и азимута определяются амплитудно-разностным методом, дальность по времени между запросным и отраженным сигналами, высота определяется вычислением по углу места и дальности, как, например, в метеокомплексе фирмы VAISALA, состоящем из метеолокатора и АРЗ, в котором слежение за последним происходит по указанной схеме (см. ж. VAISALA News, 136, 1995 г., стр. 9-12, Финляндия, Хельсинки).
Недостатком данного способа является недостаточная точность, т.к. не учитываются атмосферные ошибки и/или ошибки распространения, криволинейность распространения луча в тропосфере и т.д.
Известен способ определения дальности, см. заявку РФ 93047542, цель изобретения которого - повышение точности измерения дальности. Для этого в способе измерения дальности до отражающей поверхности, включающем излучение из двух точек объекта сигналов в напрвлении отражающей поверхности, прием отраженных сигналов на объекте и определение дальности по соотношению направлений излучения и приема сигналов и известному расстоянию между точками их излучения и приема, излучение сигналов осуществляют в плоскости, образованной пересекающимися прямыми, одна из которых совпадает с отрезком, соединяющим точки излучения и включающим в себя точку начала отсчета дальности, а вторая проходит через эту точку в направлении отсчета дальности по направлениям, пересекающимся в точке, расположенной на пересечении второй прямой с отражающей поверхностью, а прием отраженных сигналов в - точке начала отсчета дальности, затем определяют дальность до отражающей поверхности из приведенного соотношения.
Недостатком способа является его сложность, большие материальные затраты, требует двух РЛС, но все равно точность недостаточная, т.к. не учитываются криволинейность земной поверхности, атмосферные ошибки и пр.
Известен способ коррекции ошибки вычисления высоты при радиолокационном измерении, учитывающий сферическую поверхность Земли, см. "Справочник по радиолокации", под ред. М.Сколника, т.4. М.: Сов.Радио, 1978 г., стр. 78.
Недостатком данного способа является его неполность, т.е. не учитывается атмосферная рефракция распространения радиоволн, а также влияние состояния атмосферы на точность измерения (влажность, давление, температура).
Известен способ коррекции в выражении систематических ошибок, например, ошибка при измерении угла места пропорциональна среднему значению изменения показателя преломления по пути распространения радиоволн, см. "Теоретические основы радиолокации" под ред. В.Е.Дулевича. М.: Сов.Радио, 1978 г., стр. 431-435. Зная эту формулу, можно программно в РЛС (в блок обработки сигналов цели) вносить корректировку в измеренные параметры, тем самым повысить точность измерения прототип.
Недостатками этого способа являются следующие:
- формула дает один знак отклонения луча, в действительности же из-за различий температуры, влажности и пр. знак может быть противоположен и может даже изменяться несколько раз по пути следования луча;
- полученные выражения справедливы только для плоской модели атмосферы и не могут быть использованы при наблюдении цели вблизи горизонта;
- полученные выражения даны для сухой атмосферы, в действительности же при увеличении влажности до 100% ошибка возрастает на 20-30%, то же можно сказать и о температуре.
Известно теоретическое выражение определения расстояния до АРЗ с учетом метеоусловий, в котором ошибка измерения расстояния в тропосфере определяется выражением
где N=(n-1)•106
N - индекс рефракции
l - длина криволинейного пути
R - длина прямолинейного пути
в свою очередь
N=(n-1)•106=77,6(р+4810е/Т)/Т,
т. е. связывает показатель преломления (индекс рефракции) с температурой воздуха Т (К), давлением p (мбар), влажностью (парциальным давлением водяных паров), e (мбар). См. "Справочник по радиолокации", под ред. М.Сколника, т. 4, М.: Сов.Радио, 1978 г., стр. 79.
Это выражение чисто теоретическое, т.к. использовать его на практике не представляется возможным из-за незнания конкретных метеоусловий на пути следования запросного и отраженного лучей, т.е. закон распределения метеовеличин по высоте в атмосфере заранее не известен и в большинстве случаев он случаен.
Технической задачей изобретения является повышение точности измерения координат АРЗ при всех реальных факторах состояния атмосферы во время полета АРЗ.
Для решения поставленной задачи предлагается способ измерения координат аэрологического радиозонда (АРЗ), основанный на измерении времени между посланным и отраженным от цели лучом, также на измерении угловых координат объекта, отличающийся тем, что одновременно с отраженным лучом принимают данные текущих метеовеличин и по последним вычисляют ошибку наклонной дальности до цели по выражению
где  - определяет длину криволинейного пути L, по которому распространяется радиолуч;
- определяет длину криволинейного пути L, по которому распространяется радиолуч; - определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере;
- определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере;
N - индекс рефракции;
R - длина прямолинейного пути до АРЗ;
L - длина криволинейного пути до АРЗ, по которому распространяется радиолуч;
в свою очередь
N=(n-1)•106=77,6(p+4810е/Т)/Т,
где n - показатель преломления,
Т - температура воздуха (K),
р - давление (мбар),
е - влажность (мбар).
Затем с учетом полученной ошибки определяют истинный угол места по выражению δR = 2cscε, где δR - ошибка наклонной дальности;
csc - геометрическая функция косеканс;
ε - угол места
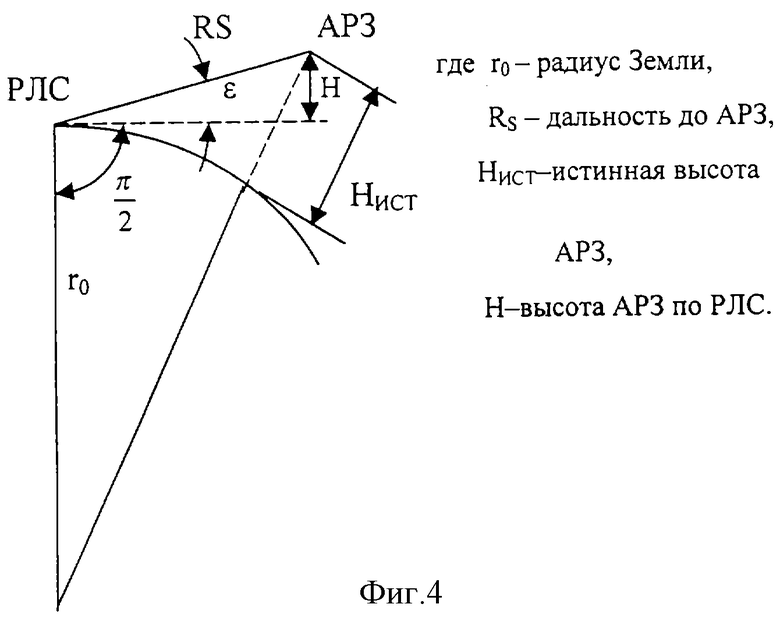
и истинную наклонную дальность до цели, равную разности R-δR, после чего определяют истинную высоту АРЗ по известному выражению
где Rs - вычисленная наклонная дальность,
r0 - радиус Земли,
sin ε - синус угла места.
Способ измерения координат аэрологического радиозонда (АРЗ), основанный на измерении времени между посланным и отраженным от цели лучом, также на измерении угловых координат, отличающийся тем, что одновременно с отраженным лучом принимают данные текущих метеовеличин и по последним вычисляют ошибку наклонной дальности до цели по выражению
где  - определяет длину криволинейного пути L, по которому распространяется радиолуч;
- определяет длину криволинейного пути L, по которому распространяется радиолуч; - определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере.
- определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере.
Затем с учетом полученной ошибки определяют истинный угол места и истинную наклонную дальность до цели, равную разности R-δR, после чего определяют истинную высоту АРЗ по известному выражению:
где Rs - вычисленная наклонная дальность,
r0 - радиус Земли,
sin ε - синус угла места.
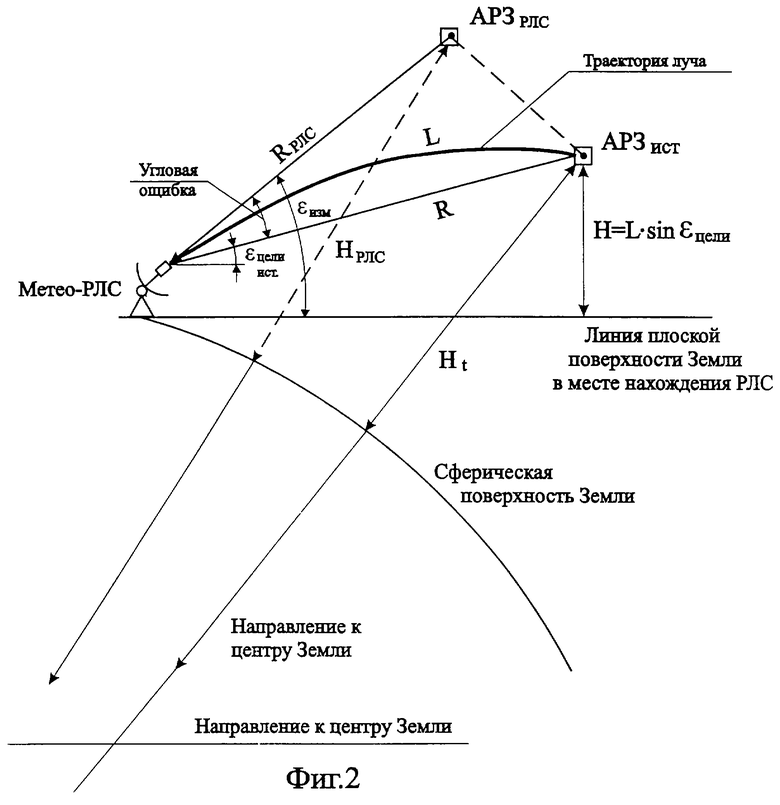
На фиг.1 изображена структурная схема способа, на фиг.2 - геометрия для общего случая (кривизна поверхности Земли, рефракция), на которых изображено: 1 - аэрологический радиозонд, 2 - метео-РЛС с антенной и излучателем, 3 - антенная колонка, 4 - антенный коммутатор, 5 - циркулятор, 6 - передатчик, 7 - приемник, 8 - блок определения угловых координат, 9 - блок определения дальности, 10 - блок определения метеовеличин, 11 микропроцессор, ε - угол места, β - угол азимута, Р - давление, toС - температура, е - влажность, R - дальность, Н - высота, антенна АРЗ канала телеметрии.
АРЗ 1 через прямой и отраженный радиолучи, также каналом телеметрии связан с антенной 2 метео-РЛС, которая механически связана с антенной колонкой 3, а электрически связана с антенным коммутатором 4, который через циркулятор 5 соединен с выходом передатчика 6 и с входом приемника 7, последние также связаны между собой, выход приемника 7 связан с блоками определения угловых координат 8, определения дальности 9, определения метеовеличин 10, которые в свою очередь связаны с информационными входами микропроцессора 11, выходы которого соединены с индикаторами, принтером и пр., кроме того, выход блока определения угловых координат связан с антенной колонкой 3. Блок питания, задающий генератор, цепи синхронизации, управления и т.д. условно не показаны.
Указанные узлы и блоки могут быть взяты или выполнены на типовых элементах современных РЛС, также может быть взята целиком серийно выпускаемая метео-РЛС, см. А. А.Ефимов "Принципы работы аэрологического информационно-вычислительного комплекса АВК-1". М.: Гидрометеоиздат, 1989, стр. 61-67.
Микропроцессор может быть взят, например, фирмы Intel 80С 188ЕС-16, см. Каталог "Сектор электронных компонентов. Россия-99". М., ДОДЭКА, 1999, стр. 487.
Устройство по предлагаемому способу работает в следующих режимах. Вначале на малых дальностях, затем на средних дальностях, затем на больших дальностях.
Режим малой дальности
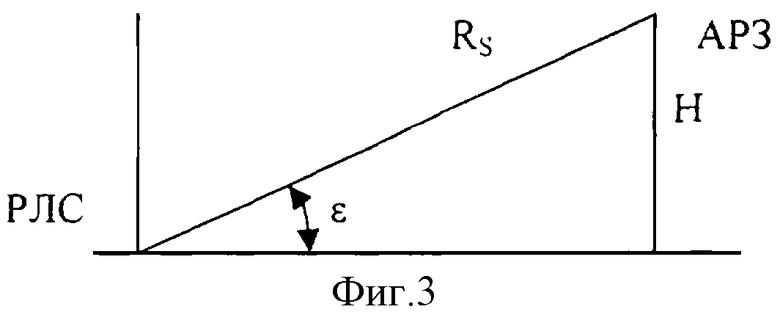
В этом режиме при работе по целям, находящимся на малых дальностях (до 10 единиц км), достаточно хорошая оценка координат цели получается при допущении, что Земля имеет плоскую поверхность, тогда геометрия имеет вид, представленный на фиг.3, где Rs - наклонная дальность, ε - угол места, Н - высота, которые связаны между собой простым уравнением:
Η = Rs•sinε
Ошибка же определения дальности может быть описана следующим выражением:
δR = 2cscε(м),
но эти выражения не могут быть использованы при наблюдении АРЗ вблизи горизонта (угол места меньше 6o).
Кроме непосредственного (прямого) измерения дальности и угловых координат метео-РЛС выдает высоту АРЗ, но это измерение высоты полета АРЗ является косвенным, т.к. производится расчетным путем с использованием значения дальности АРЗ и ее угла места над видимым горизонтом. Также расчетным путем по дальности и угловым координатам определяются текущие графические широта и долгота АРЗ (при необходимости).
Режим средней дальности (до 10-15 км)
В этом режиме для повышения точности учитывается кривизна земной поверхности, согласно геометрии, представленной на фиг.4.
Согласно теореме косинусов имеем
после преобразований
Для целей, находящихся на небольших высотах, для которых 2r0≥Hист, это уравнение преобразуется в выражение
В этом режиме и в режиме малой дальности вычисление истинной высоты по приведенным выражениям для МП 11 не представляет труда, это обыкновенная математическая задача.
Режим большой дальности (до 120-150 км)
В этом режиме учитывается дополнительно атмосферная рефракция электромагнитных волн вдоль трассы распространения до цели. Известно, что в земной атмосфере электромагнитные волны обычно преломляются, отклоняясь по направлению к земной поверхности, это обусловлено изменением с высотой показателя преломления, определяемого как отношение скорости распространения в свободном пространстве к скорости в рассматриваемой среде. В тропосфере показатель преломления N зависит от температуры, давления и содержания водяных паров и может быть выражен как
(n-1)•106=N=77,6(p+4810e/T)/T,
где Т - температура воздуха, К;
p - барометрическое давление, мбар;
е - парциальное давление водяного пара, мбар.
С увеличением высоты показатель преломления уменьшается, т.к. p и e быстро уменьшаются с увеличением высоты.
Таким образом, в этом режиме для коррекции определения дальности (высоты) используются получаемые данные метеовеличин с блока 10. Эти данные поступают на МП 11, где вычисляется показатель преломления и по нему определяется ошибка по дальности δR и корректируется измеренная дальность до цели и вычисляются Н и географические широта и долгота цели. Ошибка по дальности определяется интегральным выражением, приведенным выше.
Таким образом, используя полученные от АРЗ метеовеличины, одновременно с замеренными параметрами цели (угловые координаты и дальность) корректируем эти замеренные параметры и с большой точностью (до единиц метров) получаем истинные координаты АРЗ.
Видно, что построение метео-РЛС по предложенному способу позволяет без больших аппаратурных затрат значительно повысить точность измерения параметров полета АРЗ. Измеренные данные состояния атмосферы можно передавать на другие РЛС, например кругового обзора на аэродроме для повышения точности работы последнего. Эти данные можно считать действительными до следующего запуска АРЗ и т.д.
Ошибки в измерении координат подразделяются на систематические и случайные. Систематические ошибки имеют постоянные значения по крайней мере в течение одного сеанса измерений и могут быть скомпенсированы. Случайные же ошибки вызываются неконтролируемыми причинами, не могут быть полностью предсказаны, а следовательно, и скомпенсированы. К последним относятся, в том числе, ошибки распространения, вызываемые турбулентными процессами в атмосфере, изменениями температуры по высоте, а также влажности и давления. В настоящее время принято считать (на основе экспериментальных данных), что ошибка, которую вносит тропосфера, численно равна среднему значению изменения показателя преломления в интервале высот от 0 до Z и изменяется линейно. Для стандартной атмосферы полная ошибка δR=2 csc β (м), где R - расстояние до цели, csc - геометрическая функция косеканс, β - угол входа луча в очередной слой атмосферы.
Полученные выражения справедливы только для плоской модели атмосферы и не могут использоваться при наблюдении цели вблизи горизонта.
Также видно, что ошибка всегда имеет один знак. Ошибка измерения координат в ионосфере определяется полной интегральной концентрацией электронов, ее также можно оценить и даже спрогнозировать по экспериментальным данным об изменении средних значений полной интегральной концентрации электронов в зависимости от года, сезона и времени суток. Эта ошибка также имеет всегда один знак. В стратосфере распространение луча происходит прямолинейно. Таким образом, из экспериментальных данных видно, что в тропосфере и ионосфере луч распространяется криволинейно и отклоняется вниз, т.е. ошибка имеет один знак, следовательно, в тропосфере и ионосфере их можно складывать арифметически. Последние экспериментальные данные показывают, что это не совсем так. Ошибки измерения координат в тропосфере, стратосфере и ионосфере в зависимости от температуры, влажности и давления могут иметь и противоположный знак. Поэтому применение данного способа позволяет учесть все ошибки, связанные с состоянием атмосферы по всей длине распространения радиолуча до АРЗ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ загоризонтного обнаружения цели | 2020 |
|
RU2754770C1 |
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2023 |
|
RU2801741C1 |
| АНТЕННАЯ СИСТЕМА МЕТЕОЛОКАТОРА С ЛИНЕЙНОЙ И КРУГОВОЙ ПОЛЯРИЗАЦИЕЙ | 2000 |
|
RU2195056C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ ДО АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА | 2004 |
|
RU2304290C2 |
| ПРИЕМОПЕРЕДАЮЩАЯ СИСТЕМА АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И ЕЕ КОНСТРУКТИВ | 2001 |
|
RU2214614C2 |
| СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ С ПАКЕТНОЙ ПЕРЕДАЧЕЙ МЕТЕОРОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2529177C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
Изобретение относится к радиолокации и может быть использовано для измерения координат аэрологических радиозондов (АРЗ). Способ основан на измерении времени между посланным и отраженным от АРЗ лучом, на измерении угловых координат АРЗ, а также на том, что одновременно с отраженным лучом принимают данные текущих метеовеличин и по последним вычисляют ошибку наклонной дальности до АРЗ, а затем с учетом полученной ошибки определяют истинный угол места и истинную наклонную дальность до АРЗ, после чего определяют истинную высоту АРЗ. Достигаемым техническим результатом изобретения является повышение точности измерения координат АРЗ при реальных факторах состояния атмосферы во время полета АРЗ. 4 ил.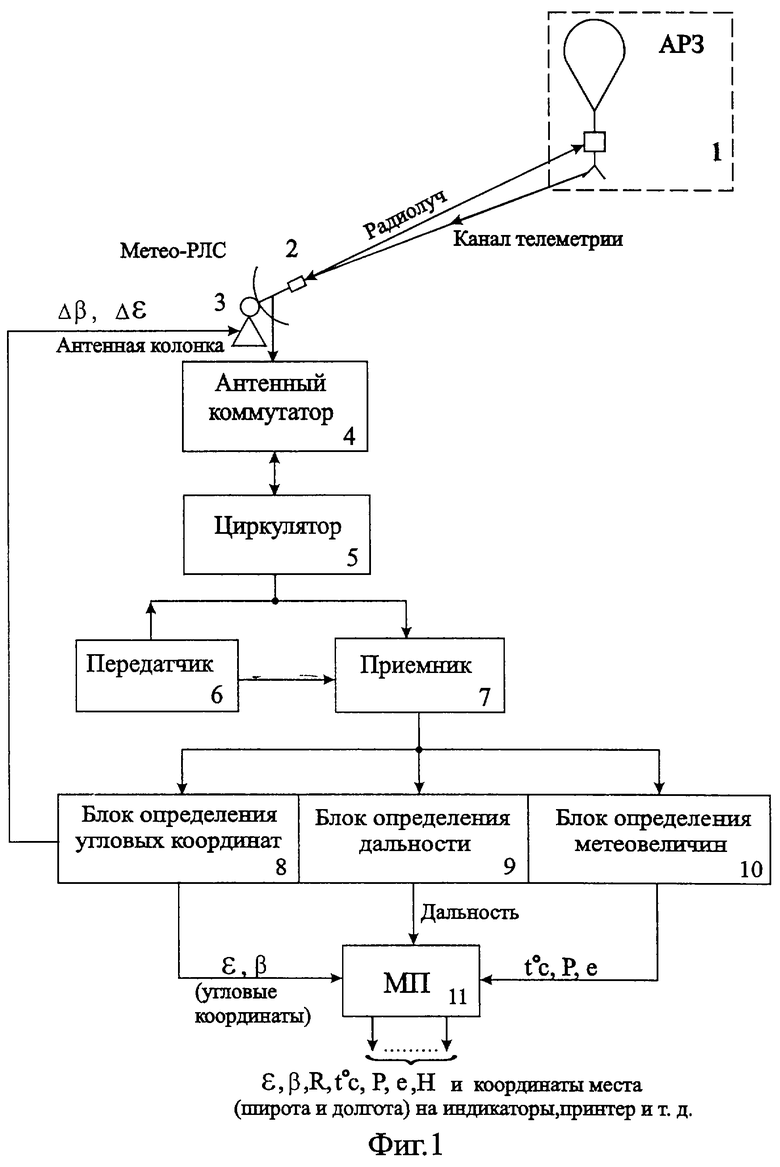
Способ измерения координат аэрологического радиозонда (АРЗ), основанный на измерении времени между посланным и отраженным от АРЗ лучом, также на измерении угловых координат АРЗ, отличающийся тем, что одновременно с отраженным лучом принимают данные текущих метеовеличин и по последним вычисляют ошибку наклонной дальности до АРЗ по выражению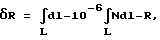
где  определяет длину криволинейного пути L, по которому распространяется радиолуч;
определяет длину криволинейного пути L, по которому распространяется радиолуч; определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере;
определяет ошибку, вызванную различием скоростей распространения в свободном пространстве и атмосфере;
N - индекс рефракции;
R - длина прямолинейного пути до АРЗ;
L - длина криволинейного пути до АРЗ, по которому распространяется радиолуч,
в свою очередь
N=(n-1)•106=77,6(p+4810е/Т)/Т,
где n - показатель преломления;
Т - температура воздуха, К;
р - давление, мбар;
е - влажность, мбар,
затем с учетом полученной ошибки определяют истинный угол места по выражению
δR = 2cscε,
где δR - ошибка наклонной дальности;
csc - геометрическая функция косеканс;
ε - угол места,
и истинную наклонную дальность до АРЗ, равную R-δR, после чего определяют истинную высоту АРЗ по известному выражению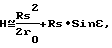
где Rs - истинная наклонная дальность;
r0 - радиус Земли,
Sinε - синус угла места.
| Теоретические основы радиолокации./ Под ред | |||
| В.Е | |||
| ДУЛЕВИЧА | |||
| -М.: Сов | |||
| радио, 1978, с.431-435 | |||
| СПОСОБ РАДИОАКУСТИЧЕСКОГО НАКЛОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 1999 |
|
RU2152055C1 |
| УГЛОМЕРНОЕ УСТРОЙСТВО МАЛОВЫСОТНОЙ РЛС | 1991 |
|
RU2013786C1 |
| US 5173690, 22.12.1992 | |||
| US 4761650, 02.08.1988. | |||

