Изобретение относится к самоходным транспортным средствам с инерционным движителем.
Известно транспортное средство с движителем инерционно-реактивного действия, содержащее корпус, вал и рычаги с массами, предназначенными для кругового движения, и механизм отклонения рычагов (см. описание к патенту РФ 2146631, В 62 D 57/00, 2000 [1]). Недостатком известного транспортного средства является сложность конструкции движителя.
Известно транспортное средство, содержащее корпус и движитель в виде колеблющегося элемента (см. описание к патенту Германии 172593, кл. 65 f3, 17, 1904 [2] ). Недостатком известного устройства является относительная сложность конструкции, заключающаяся в том, что колеблющийся элемент выполнен из нескольких сочлененных деталей. Кроме того, известный движитель может быть использован только для водного транспорта.
Наиболее близким к заявляемому по своей технической сущности является транспортное средство, известное из описания к патенту Германии 901992, кл. 65 f3, 17, 1953 [3]. Известное устройство содержит корпус и движитель в виде колеблющегося элемента.
Недостатком известного устройства является ограниченность его применения, т.к. оно предназначено для использования в водных средах.
Заявляемое в качестве изобретения транспортное средство направлено на расширение сферы использования.
Указанный результат достигается тем, что транспортное средство содержит корпус и соединенный с ним движитель в виде колеблющегося элемента, при этом оно дополнено вторым колеблющимся элементом, установленным на противоположной стороне корпуса, колеблющиеся элементы установлены с возможностью медленного перемещения при отклонении от среднего положения и быстрого при возврате к нему, при этом транспортное средство снабжено опорами, контактирующими с поверхностью перемещения, установленными на свободных концах колеблющихся элементов и в местах крепления этих элементов к корпусу.
Указанный результат достигается также тем, что каждый колеблющийся элемент соединен с корпусом с помощью упругой пластины, а его конец, обращенный к корпусу, снабжен зубчатым сектором, входящим к зацепление с зубчатым сектором, установленным на оси двигателя, которым снабжен корпус.
Отличительными признаками заявляемого устройства являются:
- дополнение транспортного средства вторым колеблющимся элементом;
- установка второго колеблющегося элемента на противоположной стороне корпуса;
- снабжение корпуса и свободных концов колеблющихся элементов опорами, контактирующими с поверхностью перемещения;
- установка колеблющихся элементов с возможностью медленного перемещения при отклонении от среднего положения и быстрого при возврате к нему;
- соединение каждого колеблющегося элемента с корпусом с помощью упругой пластины и снабжение его конца, обращенного к корпусу, зубчатым сектором, входящим в зацепление с зубчатым сектором, установленным на оси двигателя, которым снабжен корпус.
Как показали расчеты и эксперименты на модели заявляемого транспортного средства, если колеблющиеся элементы медленно отвести в сторону от среднего положения и обеспечить их быстрый возврат в исходное положение, то транспортное средство получает импульс силы, обеспечивающий его перемещение.
Выполнение колеблющегося элемента может быть любым, также как и установка этого элемента с возможностью обеспечения указанного режима колебаний. Например, один конец колеблющегося элемента может быть закреплен на оси реверсивного электродвигателя с изменяемым числом оборотов вала с тем, чтобы его вращение на заданный угол по часовой стрелке и против нее осуществлялось то быстро, то медленно. Управление таким двигателем может осуществляться, например, с помощью ЭВМ, снабженной соответствующей программой.
Наиболее простым представляется выполнение заявленного устройства, как оно описано в п.2 формулы изобретения. При этом форма колеблющегося элемента может быть любой.
Опоры, которыми снабжается транспортное средство, необходимы, чтобы обеспечить его движение по поверхности перемещения и могут быть выбраны из числа известных.
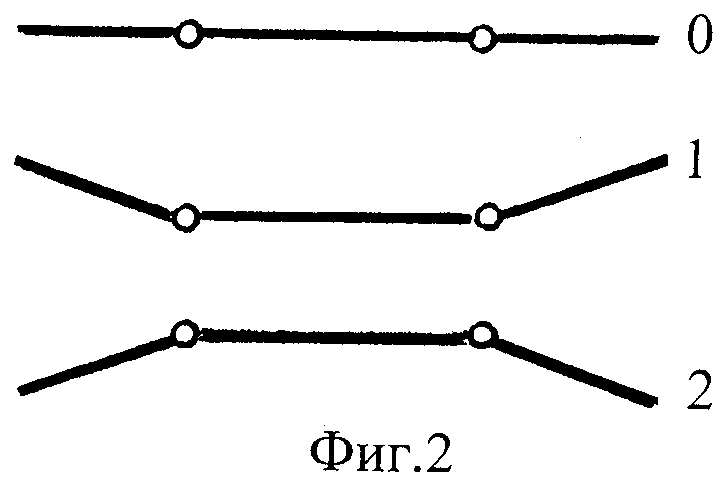
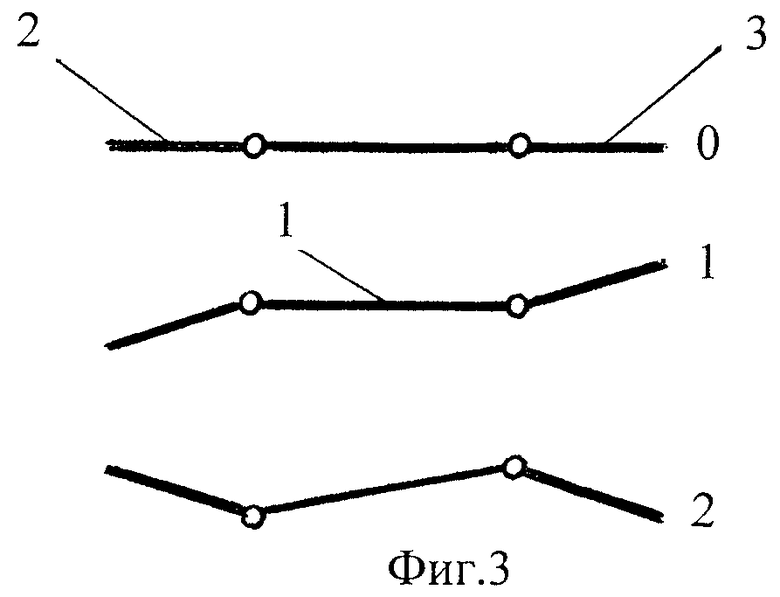
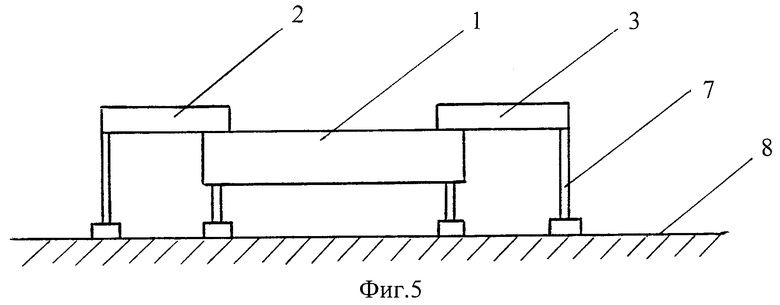
Сущность заявляемого транспортного средства поясняется примерами его реализации и чертежами. На фиг.1-3 схематично показано заявляемое транспортное средство в различных фазах движения (вид сверху). На фиг.4 представлен вариант крепления колеблющегося элемента (вид сверху) к корпусу транспортного средства в различных фазах его движения. На фиг.5 показана принципиальная схема транспортного средства (вид сбоку).
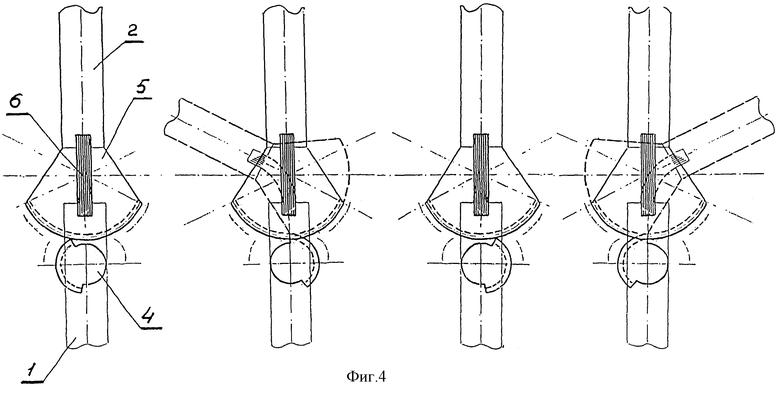
В общем случае транспортное средство содержит корпус 1 и соединенные с ним колеблющиеся элементы 2 и 3. Транспортное средство снабжено двигателем (не показан), на оси которого установлен зубчатый сектор 4. Колеблющийся элемент также снабжен зубчатым сектором 5 и присоединен к корпусу с помощью упругой пластины 6. Корпус и свободные концы колеблющихся элементов снабжены опорами 7, контактирующими с поверхностью перемещения 8.
Транспортное средство функционирует следующим образом. Двигатель вращает зубчатый сектор 4 по часовой стрелке и за счет взаимодействия с зубчатым сектором 5 медленно отклоняет колеблющийся элемент 2 влево, деформируя упругую пластину 6. При дальнейшем вращении сектора 4 последний выходит из зацепления с сектором 5 и под воздействием упругих сил пластины 6 элемент 2 резко возвращается в исходное положение, сообщая импульс силы, приводящий к движению корпуса 1. После этого двигатель начинает медленно вращать зубчатый сектор 4 против часовой стрелки и тем самым отклоняет колеблющийся элемент 2 вправо до выхода сектора 4 из зацепления с зубчатым сектором 5, после чего элемент 2 резко возвращается в исходное положение и цикл повторяется. Размеры зубчатых секторов 4 и 5 и число зубьев на них определяются расчетным путем или экспериментально с тем, чтобы обеспечить медленное отклонение элемента 2 на заданный угол и выход из зацепления при его достижении.
Транспортное средство может совершать три вида движений: продольное перемещение, боковое смещение и вращение на месте. Совмещая эти виды движений, можно осуществить произвольное перемещение транспортного средства.
Произвольное перемещение транспортного средства осуществляется следующим образом. Элемент 2 медленно отклоняется вниз на некоторый угол, при этом транспортное средство переходит из положения (0) в положение (1), см. фиг.1. Затем элемент 2 резко поворачивается по часовой стрелке и одновременно с ним элемент 3 резко поворачивается против часовой стрелки. Транспортное средство получает импульс силы в продольном направлении и перемещается вправо на некоторое расстояние, принимая положение (2). После этого элементы 2 и 3 синхронно медленно поворачиваются по часовой стрелке, переводя транспортное средство в состояние (3). Затем элемент 2 резко поворачивается против часовой стрелки и одновременно с ним элемент 3 резко поворачивается по часовой стрелке. Транспортное средство получает импульс силы в продольном направлении и перемещается вправо на некоторое расстояние, принимая положение (4). После этого элементы 2 и 3 синхронно медленно поворачиваются против часовой стрелки, переводя транспортное средство в состояние (1). Вышеописанный цикл движений можно повторить любое количество раз, пока транспортное средство не переместится вправо на требуемое расстояние.
Боковое движение транспортного средства осуществляется следующим образом. Элементы 2 и 3 медленно синхронно отклоняются вверх на некоторый угол, при этом транспортное средство переходит из положения (0) в положение (1), см. фиг.2. Затем элемент 2 резко поворачивается против часовой стрелки и одновременно с ним элемент 3 резко поворачивается по часовой стрелке. Это быстрое синхронное движение сообщает транспортному средству импульс силы, приводящей к движению корпуса вверх. Транспортное средство принимает положение (2). Затем элементы 2 и 3 медленно отклоняются вверх, пока транспортное средство снова не придет в положение (1). После этого можно повторить вышеописанный цикл любое количество раз, пока транспортное средство не переместится вверх на требуемое расстояние.
Вращение транспортного средства осуществляется следующим образом. Элементы 2 и 3 медленно синхронно поворачиваются против часовой стрелки на некоторый угол, при этом транспортное средство переходит из положения (0) в положение (1), см. фиг.3. Затем элементы 2 и 3 одновременно резко поворачиваются по часовой стрелке, сообщая транспортному средству импульс силы, приводящий к вращению корпуса против часовой стрелки. Транспортное средство принимает положение (2). Затем элементы 2 и 3 снова медленно поворачиваются против часовой стрелки, пока транспортное средство снова не придет в положение (1). После этого можно повторить вышеописанный цикл любое количество раз, пока транспортное средство не повернется на требуемый угол.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2098337C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2000 |
|
RU2175945C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2007 |
|
RU2360821C1 |
| ВНУТРИТРУБНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 1996 |
|
RU2093281C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ПРОИЗВОЛЬНО ОРИЕНТИРОВАННЫМ В ПРОСТРАНСТВЕ ПОВЕРХНОСТЯМ | 1992 |
|
RU2042558C1 |
| ОРТОПЕДИЧЕСКИЙ АППАРАТ | 1997 |
|
RU2119310C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2231463C2 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ АГРЕГАТА ДЛЯ ДОБЫЧИ ПОЛЕЗНОГО ИСКОПАЕМОГО НА МОРСКОМ ДНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2168634C2 |
| Система управления транспортного средства | 1989 |
|
SU1781099A1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ЦЕНТРОБЕЖНОЙ СИЛЫ В ЭНЕРГИЮ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2837592C2 |
Изобретение относится к самоходным транспортным средствам с инерционным движителем. Транспортное средство содержит корпус и соединенный с ним движитель в виде колеблющегося элемента. При этом оно дополнено вторым колеблющимся элементом, установленным на противоположной стороне корпуса. Колеблющиеся элементы установлены с возможностью медленного перемещения при отклонении от среднего положения и быстрого при возврате к нему. Транспортное средство снабжено опорами, контактирующими с поверхностью перемещения, установленными на свободных концах колеблющихся элементов и в местах крепления этих элементов к корпусу. Каждый колеблющийся элемент соединен с корпусом с помощью упругой пластины, а его конец, обращенный к корпусу, снабжен зубчатым сектором, входящим в зацепление с зубчатым сектором, установленным на оси двигателя, которым снабжен корпус. В результате расширяется сфера использования транспортного средства. 1 з.п. ф-лы, 5 ил.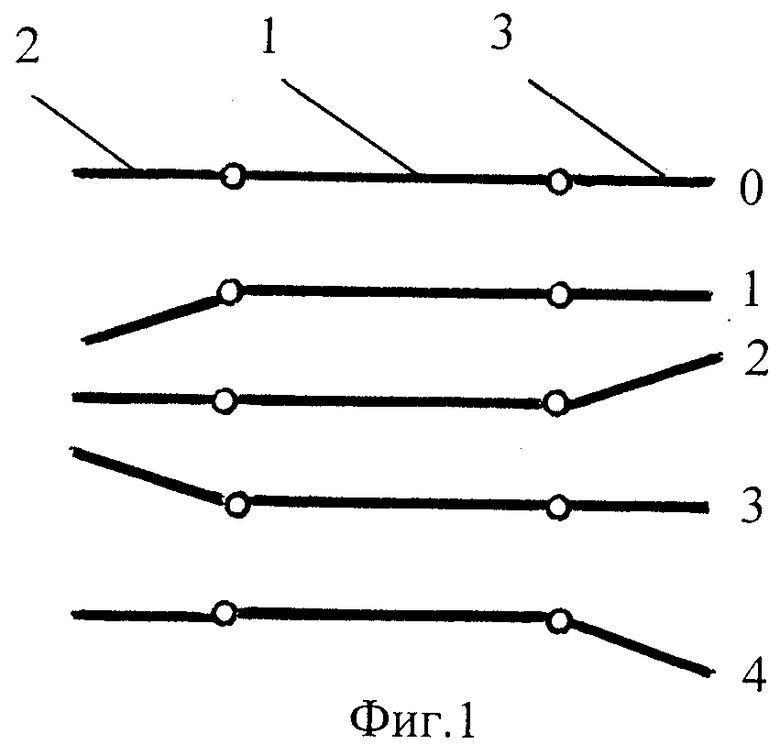
| Двухдвигательная следящая система | 1980 |
|
SU901992A1 |
| БСЕСОШГ.-ГГ ]1^ 'iAv:;ir;;3-<>&i I П'^:1-::/.л i | 0 |
|
SU172593A1 |
| ДВИЖИТЕЛЬ ИНЕРЦИОННО-РЕАКТИВНОГО ДЕЙСТВИЯ | 1998 |
|
RU2146631C1 |

