Изобретение относится к устройству для вставки удлиненных предметов, таких как кабели или трубы, в скобы, расположенные внутри недоступной для прохода трубы, согласно ограничительной части п.1 формулы изобретения.
Устройство этого рода известно из ЕР-А-0109739. Оно содержит опирающийся посредством полозьев на внутреннюю стенку трубы каркас, перемещаемый посредством троса в продольном направлении трубы. На каркасе в продольном направлении друг за другом с возможностью продольного перемещения индивидуально, вращения вокруг продольной оси и движения в радиальном направлении установлены приводные установочные головки, имеющие каждая проходящий в продольном направлении приемный паз для размещения одного и того же кабеля. Для сгибания кабеля в нужном направлении обе установочные головки поворачивают по отношению друг к другу вокруг продольной оси. Для вставки выпрямленного кабеля в закрепленную на стенке трубы скобу обе установочные головки, если смотреть в направлении, в котором тянут трос, перемещают в положение, находящееся по потоку за скобой, а затем в радиальном направлении наружу, с тем чтобы вставить кабель в скобу. На каркасе с возможностью опирания также посредством полозьев на внутреннюю стенку трубы подвешено опорное устройство, которое содержит перемещаемый посредством цилиндропоршневого агрегата в радиальном направлении опорный элемент с углублением для размещения кабеля. При помощи опорного элемента кабель опирается между скобой, в которую он уже был вставлен, и установочными головками, прижимаясь к стенке трубы. Для перемещения опорного элемента мимо скобы его временно опускают посредством цилиндропоршневого агрегата.
Задачей настоящего изобретения является создание родового устройства, которое при простой конструкции имело бы значительно большую производительность.
Эта задача решается с помощью устройства, обладающего признаками п.1 формулы изобретения. За одну операцию в скобы, расположенные рядом друг с другом внутри недоступной для прохода трубы, можно вставлять несколько удлиненных предметов.
Особенно предпочтительная форма выполнения устройства приведена в п.2. Она позволяет с помощью одной и той же установочной головки вставлять в скобы удлиненные предметы в трубах разного диаметра. Кроме того, эта форма выполнения обеспечивает расположение скоб очень близко рядом друг с другом, поскольку соседние предметы последовательно вставляют в соответствующие скобы и, тем самым, требуется зона отклонения каждый раз только одной скобы.
Приведенная в п.8 предпочтительная форма выполнения обеспечивает беспроблемную и экономичную подгонку под разные диаметры недоступной для прохода трубы. При этом главный модуль, который может содержать, в частности, также привод для движения установочной головки, а также необходимые электронные компоненты, пневмо- или гидроклапаны, может быть одним и тем же для всех возможных диаметров недоступной для прохода трубы. Соответствующая подгонка под разные диаметры трубы происходит за счет использования переходников, соответственно смещающих установочную головку или направляющее устройство в радиальном направлении.
Другие предпочтительные формы выполнения объекта изобретения приведены в других зависимых пунктах.
Настоящее изобретение более подробно поясняется с помощью примера выполнения, изображенного на чертежах, где:
- фиг.1: общий вид расположенного в изображенной в разрезе в продольном направлении трубе устройства для вставки удлиненных предметов в скобы;
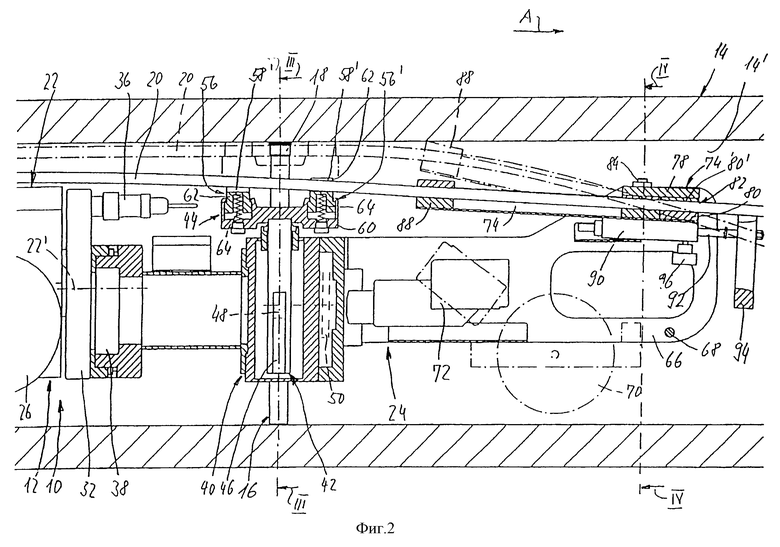
- фиг.2: также общий вид, а также в увеличенном по сравнению с фиг.1 масштабе и частично в разрезе часть изображенного на ней устройства;
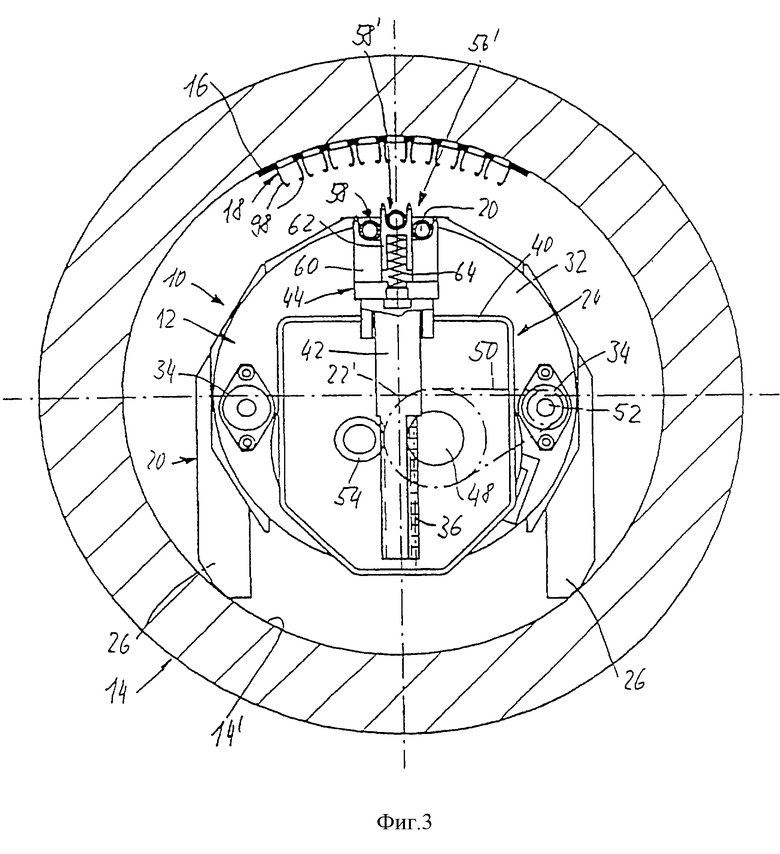
- фиг.3: изображенное на фиг.1 и 2 устройство в разрезе по линии III-III этих фигур;
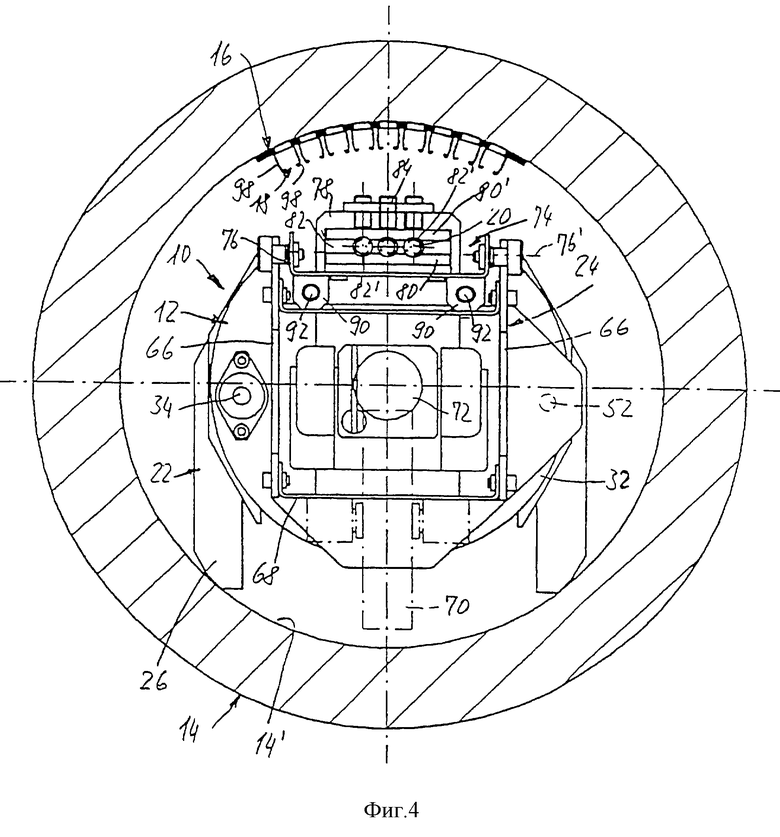
- фиг. 4: устройство при виде сбоку и частично в разрезе по линии IV-IV на фиг.2;
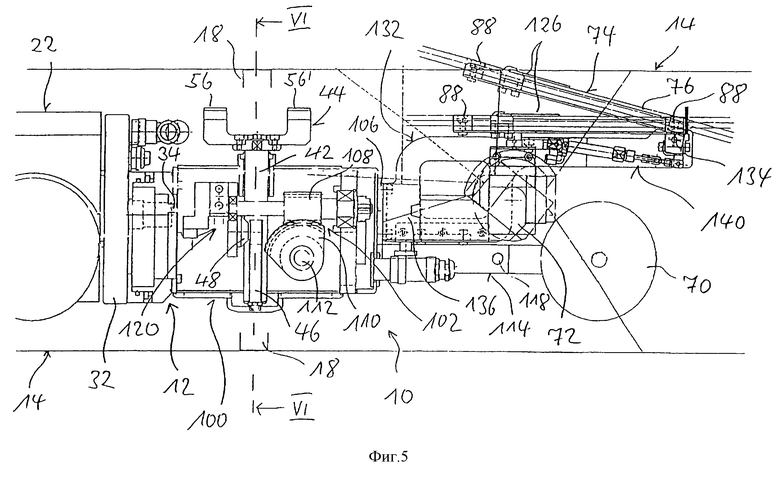
- фиг. 5: соответствующий фиг.1 вид другой формы выполнения устройства для вставки удлиненных предметов в скобы;
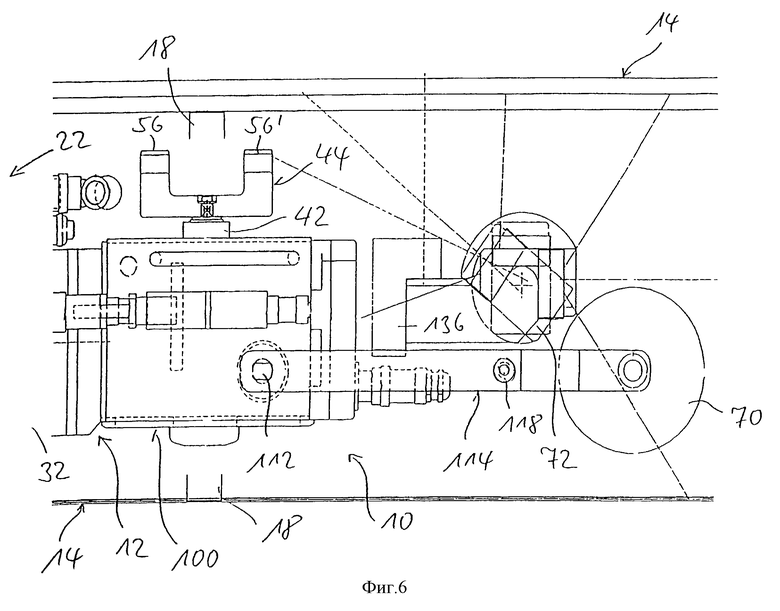
- фиг. 6: вид сбоку устройства по фиг.5, причем для наглядности направляющее устройство отсутствует;
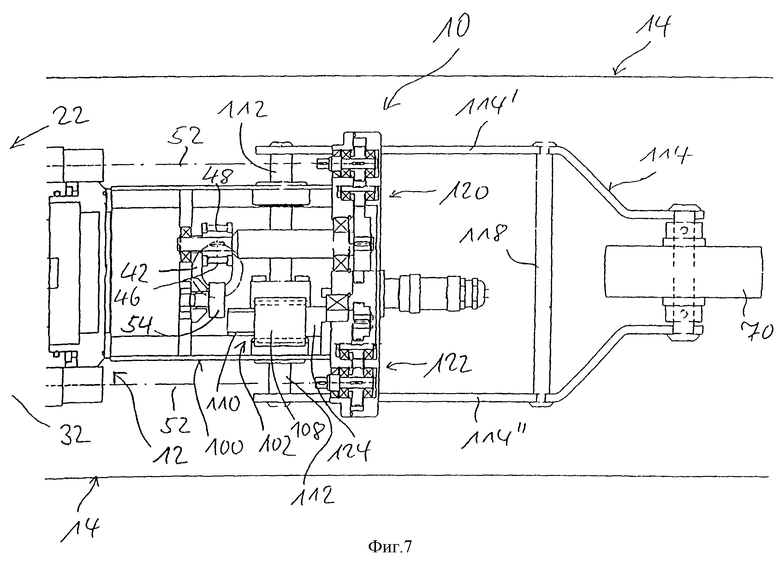
- фиг. 7: горизонтальный разрез устройства по фиг.5 без направляющего устройства;
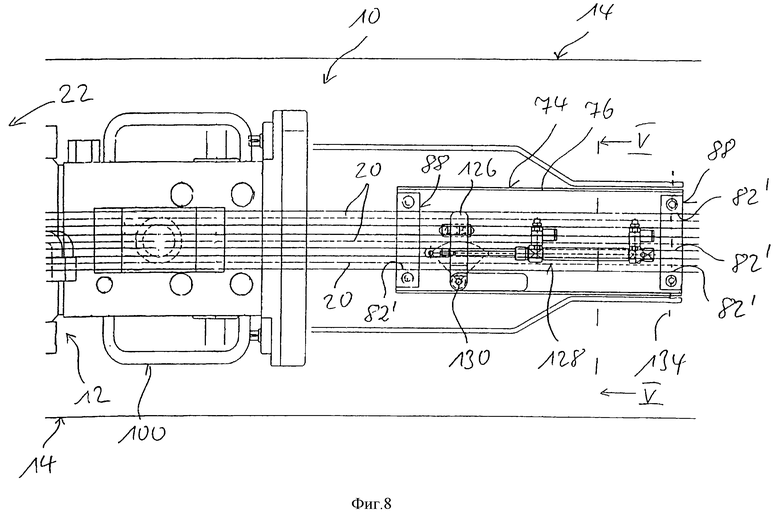
- фиг.8: вид сверху на устройство по фиг.5;
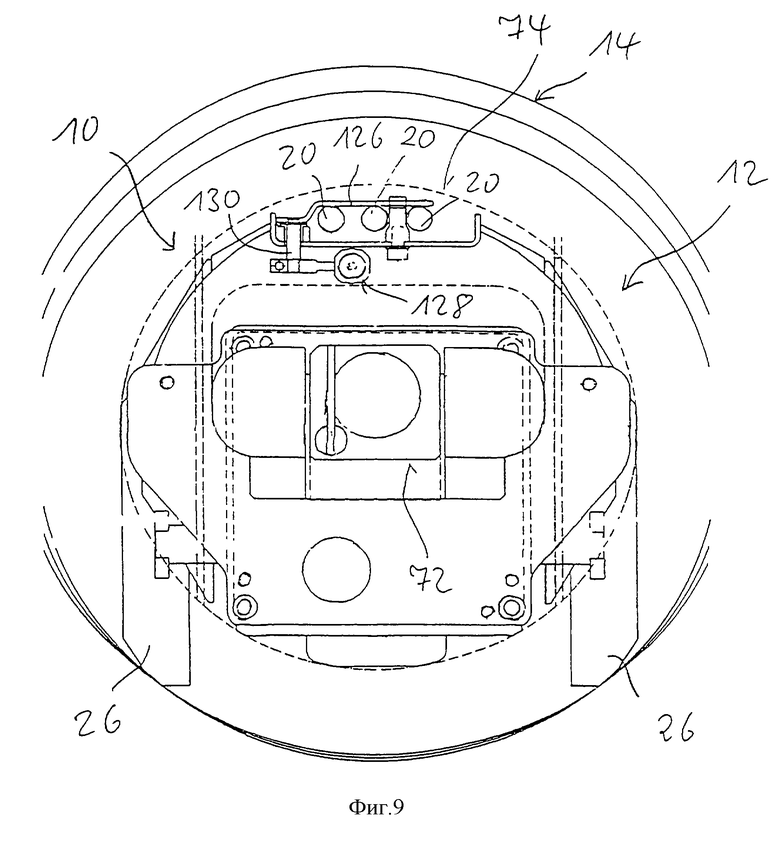
- фиг.9: изображенное на фиг.5 и 8 устройство в разрезе по линии V-V на фиг.8;
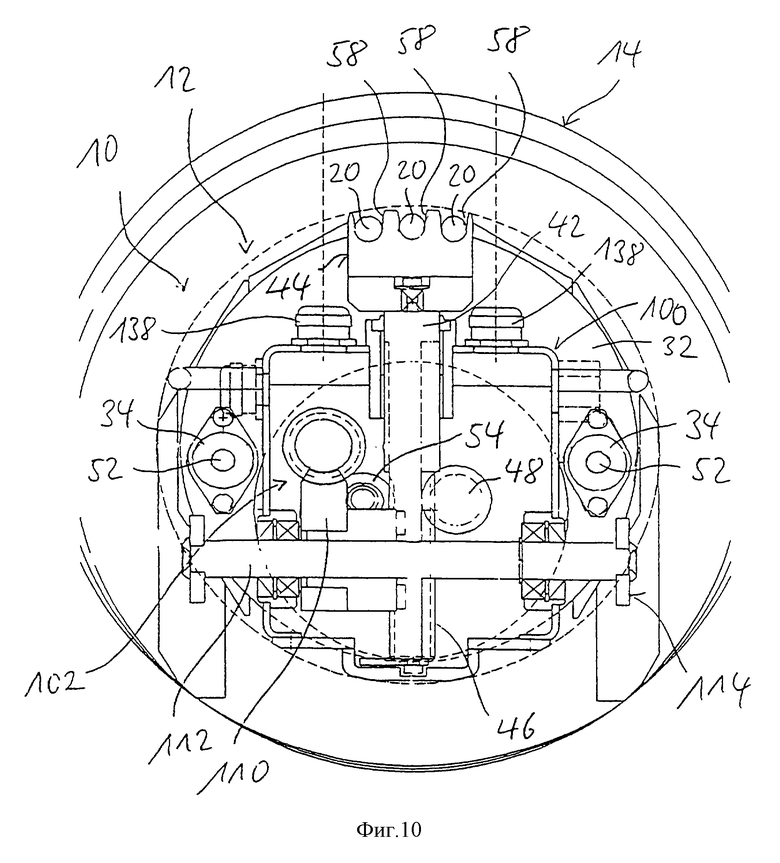
- фиг. 10: изображенное на фиг.1 устройство в разрезе по линии VI-VI на фиг.1;
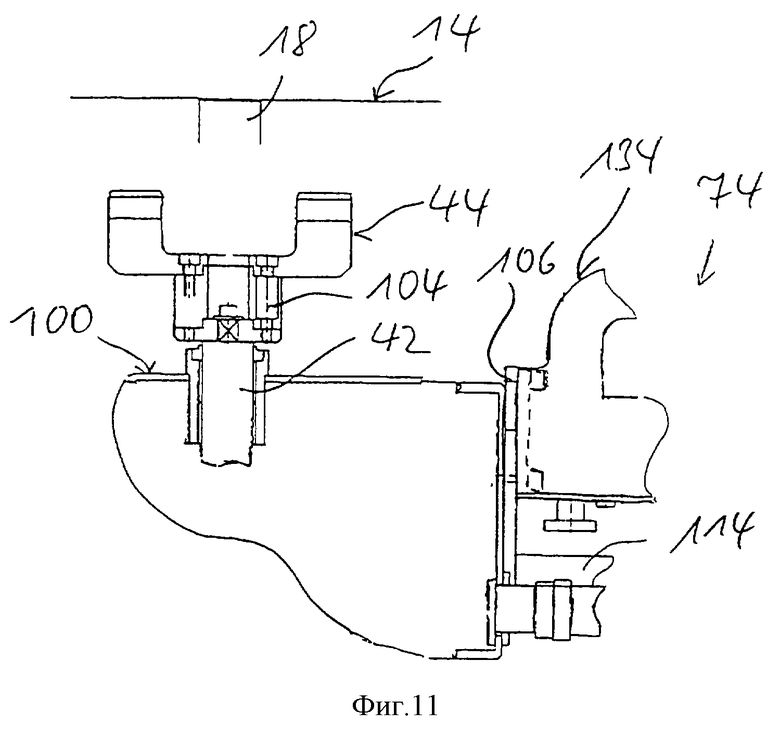
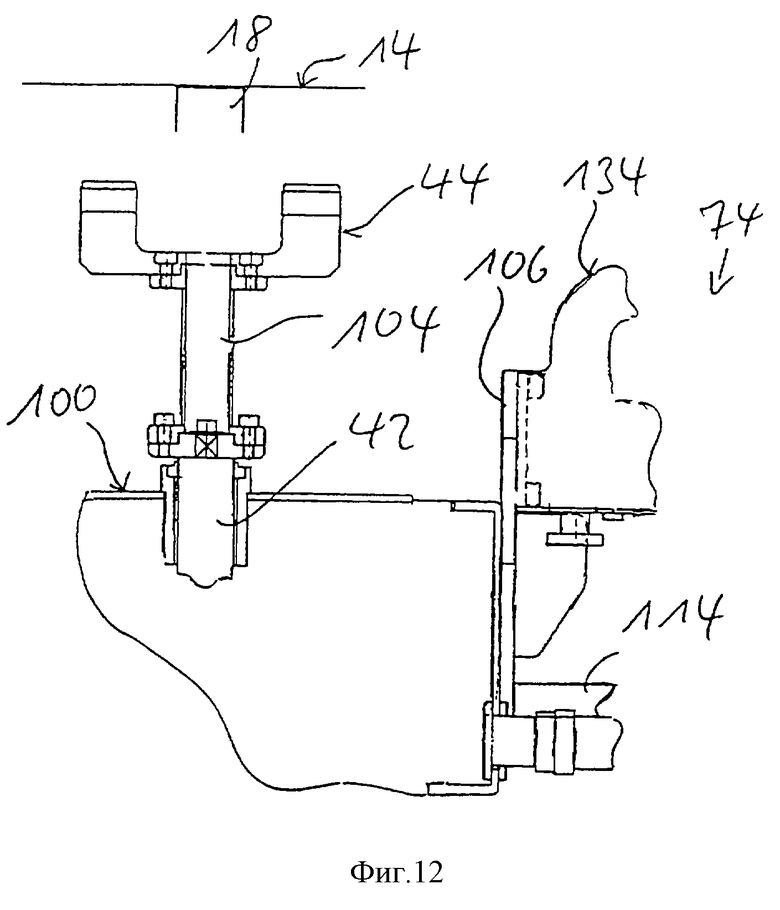
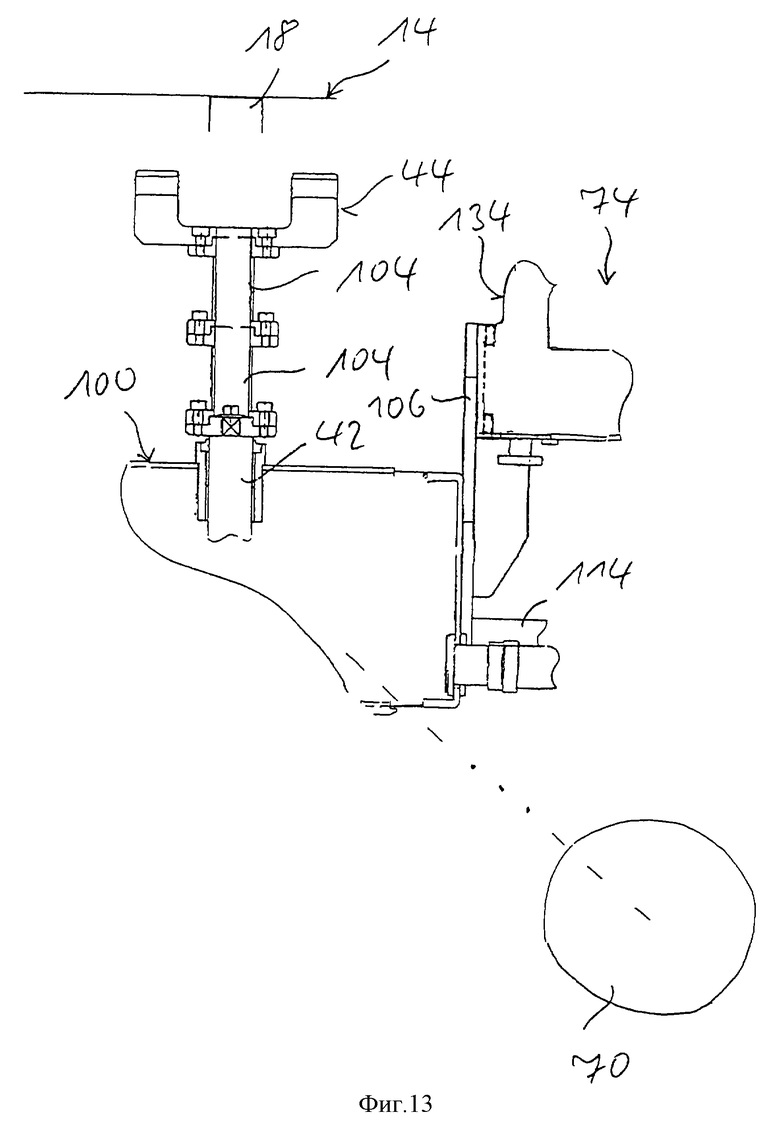
- фиг. 11-13: виды сбоку части устройства по фиг.5 с переходниками для подгонки к разным диаметрам недоступной для прохода трубы.
Изображенное на фиг.1 устройство 10 содержит передвижной каркас 12, который расположен внутри недоступной для прохода трубы 14, например канализационной. В ней в продольном направлении R на расстоянии друг за другом расположены внутренние опоры 16, которые содержат расположенные в верхней зоне трубы 14 в направлении периферии рядом друг с другом зажимообразные скобы 18. Устройство 10 предназначено для вставки в скобы заправленных в трубу 14 удлиненных предметов 20, таких как кабели или защитные трубы для кабелей. Кабели представляют собой, в частности, волоконно-оптические кабели, используемые для передачи данных. Подобные кабели заправляют также в защитные трубы после их монтажа в трубе 14 или они уже расположены в защитных трубах при их монтаже.
Каркас 12 содержит, с одной стороны, общеизвестную самоходную канальную тележку-робот 22, а, с другой стороны, установленный на ней с торца рабочий блок 24. Рабочий блок 24 установлен с возможностью перемещения посредством тележки-робота 22 в продольном направлении R трубы к внутренним опорам 16 за счет привода и прилегающих к внутренней стенке 14' трубы колес 26. На тележке-роботе 22 установлено также прилегающее к внутренней стенке 14' измерительное колесо 28, соединенное с датчиком угла поворота, который передает выработанные за счет вращения измерительного колеса 28 сигналы по питающеуправляющему кабелю 30 к установленному за пределами системы трубы блоку управления и контроля. Благодаря измерительному колесу 28 известно точное положение устройства 10 в трубе 14.
На передней, если смотреть в рабочем направлении А, торцовой стенке тележки-робота 22 с возможностью вращения установлена тарелка 32, которая посредством расположенного в тележке-роботе 22 привода вращения может поворачиваться вокруг продольной оси 22' тележки-робота 22 в нужное положение. Как видно, в частности, из фиг.3, на вращающейся тарелке 32 приблизительно диаметрально противоположно друг другу установлены два ведомых вала 34, каждый из которых известным образом соединен с приводным агрегатом внутри тележки-робота 22. Далее вращающаяся тарелка 32 содержит пневматические и электрические управляющесигнальные присоединения 36 для рабочего блока 24. Последний закреплен на вращающейся тарелке 32 с возможностью съема посредством штыкового затвора 38. Названные средства 36 присоединения соединены питающесигнальным кабелем с установленными за пределами системы трубы блоками питания или с блоком управления и контроля.
Рабочий блок 24 содержит присоединенный к штыковому затвору 38 в виде консоли корпус 40, в котором в продольной средней плоскости с возможностью перемещения в радиальном направлении установлен шток 42, несущий на своем выступающем за корпус 40 конце установочную головку 44. Внутри корпуса 40 один отрезок штока 42 выполнен в виде зубчатой рейки 46, взаимодействующей с установленным на корпусе 40 цилиндрическим зубчатым колесом 48. Последнее соединено зубчатым ремнем 50 с приводным валом 52, который, в свою очередь, связан с одним из обоих ведомых валов 34 вращающейся тарелки 32. За счет привода этого ведомого вала 34 посредством соответствующего, установленного на тележке-роботе приводного агрегата можно вдвигать и выдвигать установочную головку 44 в радиальном направлении. Для удержания зубчатой рейки 46 в зацеплении с цилиндрическим зубчатым колесом 48 напротив него предусмотрен опорный ролик 54.
Установочная головка 44 имеет два удаленных друг от друга в направлении продольной оси 22' ряда 56, 56' проходящих в направлении продольной оси приемных пазов 58, причем соосные между собой приемные пазы 58 обоих рядов 56, 56' предназначены для размещения одного и того же предмета 20. В данном случае каждый ряд 56, 56' имеет три открытых наружу в радиальном направлении приемных паза 58, причем оба внешних приемных паза 58 прочно расположены в закрепленном на штоке 42 несущем теле 60 установочной головки 44, а средний приемный паз 58' выполнен в пальцеобразном установочном элементе 62, который, как показано на фиг.2 и 3, установлен с возможностью перемещения на несущем теле 60 в радиальном направлении и отвода назад против усилия пружины 64 сжатия. Как видно, в частности, из фиг.3, в исходном положении установочного элемента 62 соответствующий приемный паз 58' расположен дальше снаружи, если смотреть в радиальном направлении, чем оба других приемных паза 58.
На обращенной от тележки-робота 2 стороне от корпуса 40 отстоят два параллельных щитка 66, которые соединены на свободном конце распорными хомутами 68 и могут быть оперты на внутреннюю стенку 14' трубы через вдвигаемое и выдвижное, при необходимости, опорное колесо 70. Между обоими щитками 66 с возможностью поворота установлена общеизвестная телекамера 72, соединенная сигнальными проводами с блоком управления и контроля. Она служит, в частности, для визуального управления и контроля установочной головки.
На свободном конце щитков 66 расположено выполненное в виде коромысла направляющее устройство 74 для предметов 20. На отформованном из листовой стали с отогнутым вбок краевым отрезком несущем хомуте 76, который установлен на щитках 66 с возможностью поворота вокруг оси 76', проходящей под прямым углом к продольной оси 22', у оси 76' закреплена рама 78, в которой расположены две направляющетормозные плиты 80, 80'. Они ограничивают направляющую щель 82 и имеют на обращенных друг к другу сторонах направляющие углубления 82' для предметов 20. За счет этого три предмета 20 удерживаются и направляются рядом друг с другом на определенном расстоянии. Далее на раме 78 на каждую пару направляющих углублений 82' расположен регулировочный винт 84, посредством которого можно регулировать ширину направляющей щели 82 соответствующего направляющего углубления 82', с тем чтобы при движении устройства 10 в рабочем направлении А прикладывать к каждому предмету 20 индивидуально силу трения для зажима или удержания зажатыми предметов 20. Направляющетормозные плиты 80, 80' состоят преимущественно из гибкого пластика, например нейлона или тефлона.
На обращенном к установочной головке конце выполненного в виде рычага несущего хомута 76 закреплено направляющее тело 88, снабженное тремя проемами для ведения предметов 20. Направляющие углубления 82' и проемы в направляющем теле 88 согласованы с приемными пазами 58, 58'.
На несущем хомуте 76 под ним закреплены два направляющих элемента 90, через каждый из которых проходит штанга 92. На своем выступающем за щитки 66 конце штанги 92 соединены между собой посредством открытого вверх направляющего хомута 94 в форме кругового сегмента. Сквозь этот направляющий хомут 94 при вытянутых в направлении установочной головки 44 штангах 92 проходят предметы 20. После ослабления крепежных винтов 96 штанги 92 могут быть вдвинуты из выдвинутого положения, показанного на фиг.2 прерывисто изображенными штангами, в направлении тележки-робота 20', пока направляющий хомут 94 не окажется у направляющих элементов 90. За счет этого можно значительно уменьшить длину рабочего блока 24 для его помещения в трубу 14 или извлечения из нее через вертикальный колодец.
Сплошными линиями на фиг.1 и 2 показано положение поворота направляющего устройства 74 при опущенной в исходное положение установочной головке 44 и еще не вставленных в скобы предметах 20. Штрихпунктиром показаны установочная головка 44 в выдвинутом установочном положении и соответствующее положение поворота направляющего устройства 74.
Как видно из фиг. 3 и 4, скобы 18 содержат два выполненных самопружинящими язычка 98, между которыми может быть вставлено по одному предмету 20. Сначала в соответствующую скобу 18 вставляют средний из трех предметов 20 и лишь затем в соседние скобы 18 одновременно вставляют оба наружных предмета 20. Поскольку в две соседние скобы 18 предметы 20 вставляют неодновременно, требуется лишь зона отклонения язычков 98 одной из этих скоб 18, что обеспечивает расположение скоб 18 очень близко рядом друг с другом.
После смещения несущих скобы внутренних опор 16, например посредством устройства, раскрытого в ЕР 98102681.8, и вставки предметов 20 все устройство 10, в случае, если имеется достаточно места, опускают, например, краном в колодец, от которого отходит труба 14. В случае, если места недостаточно, тележку-робот 22 и рабочий блок 24 опускают в колодец по отдельности, монтируют между собой в колодце посредством штыкового затвора 38 и соединяют средством 36 присоединения. После этого предметы 20 помещают в направляющее устройство 74 и приемные пазы 58, 58' установочного элемента 62. Если этого нельзя сделать с концом предмета 20 - в этом случае предметы 20 могут быть помещены в направляющую щель 82 и направляющее тело 88, то направляющее устройство 74 может быть выполнено с возможностью открывания как направляющего тела 88, так и направляющей щели 82, с тем чтобы вложить предметы 20.
По окончании этой подготовительной работы устройство 10 приводят в движение с помощью тележки-робота 22 и вводят в трубу 14 с дистанционным управлением в рабочем направлении А рабочим блоком 24 вперед, пока установочная головка 44 не достигнет первой внутренней опоры 16 со скобами 18. Для регистрации этого положения служат измерительное колесо 28 и телекамера 72. За счет вращения тарелки 32 рабочий блок 24 приводят в нужное положение поворота, что происходит с дистанционным управлением при помощи телекамеры 72. Затем установочную головку 44 движут из ее исходного положения наружу в радиальном направлении, в результате чего сначала в соответствующую скобу 18 вставляется средний из трех предметов 20. Как видно из фиг.1 и 2, скобы 18 расположены при этом между обоими рядами 56, 56' приемных пазов 58, 58'. Это препятствует прогибу предметов 20 при вводе в самозакрывающиеся скобы 18. После вставки среднего предмета 20 в соответствующую скобу 18 установочную головку 44 выдвигают дальше в радиальном направлении для вкладывания обоих наружных предметов 20 в соответствующие скобы 18, в результате чего установочный элемент 62 отводится назад в несущее тело 60 против усилия пружины 64 сжатия. Во избежание при этом повреждения соответствующего предмета 20 боковые стороны установочного элемента 62 выступают за соответствующий предмет 20', так что они могут прилегать к боковой стенке 14' трубы и, тем самым, отводиться назад непосредственно трубой 14, а не косвенно посредством предмета 20. Само собой, пружина 64 сжатия выполнена таким образом, что оказываемое ею на установочный элемент 62 усилие больше, чем усилие, необходимое для вставки соответствующего предмета 20 в скобу 18.
После вставки трех предметов 20 в скобы 18 установочную головку 44 снова вдвигают в радиальном направлении, причем приемные пазы 58, 58' покидают предметы 20, которые сохраняют при этом положение, обозначенное на фиг.1 и 2 штрихпунктиром. После контроля с помощью телекамеры 72 устройство 10 перемещают в рабочем направлении А к следующей внутренней опоре 16. При этом к предметам 20 вследствие действия направляющетормозных плит 80, 80' прикладывают растягивающее усилие и удерживают их вытянутыми, в случае, если речь идет о предметах 20 с небольшой собственной жесткостью. В процессе этого движения вперед постепенно вследствие веса предметов 20 направляющее устройство 74 поворачивается против часовой стрелки, в результате чего удерживаемые параллельно рядом друг с другом предметы 20 снова входят в контакт с соответствующими приемными пазами 58, 58', причем это происходит сначала со средним предметом 20. После этого таким же образом в скобы 18 вставляют предметы 20. Эти операции повторяют, пока не будет достигнут конец трубы или следующий колодец.
В изображенном примере внутренние опоры 16 содержат по девять скоб 18. При этом предпочтительным образом сначала занимают предметами 20 три средние скобы 18. Возможные дополнительные предметы 30 вставляют затем вместе, числом до трех, в скобы на одной или другой стороне.
Само собой, можно также вкладывать в скобы 18 с помощью изображенного устройства только один или два предмета 20.
В случае, если предусмотрено одно опорное колесо 70, оно может быть также прочно расположено на рабочем блоке 24. Для обеспечения вращения рабочего блока 24 вокруг продольной оси 22' оно предпочтительно удалено от внутренней стенки 14' трубы, так что оно может прилегать к внутренней стенке 14' трубы для опирания только при вставке предметов 20 в скобы 18.
Предпочтительные внутренние опоры 16 со скобами 18 раскрыты в ЕР 98102682.6. Само собой, данное устройство может быть использовано также для вставки удлиненных предметов в скобы, непосредственно закрепленные на трубе.
На фиг. 5-13 изображен другой пример выполнения устройства 10, причем сопоставимые между собой детали обозначены теми же ссылочными позициями. Это устройство 10 имеет по сравнению с описанным выше существенно меньший опрокидывающий момент.
Для этого передвижная рама 12 содержит присоединяемый к вращающейся тарелке 32 самоходной тележки-робота 22 главный модуль 100, в котором расположены необходимые электронные компоненты, пневмо- или гидроклапаны, привод 46, 48 для перемещения установочной головки 44 и поворотный привод 102 для опорного колеса 70.
Этот главный модуль независимо от диаметра недоступной для прохода трубы 14 всегда одинаков.
Для подгонки устройства 10 к разным диаметрам недоступной для прохода трубы 14 установочная головка 44 и направляющее устройство 74 могут быть состыкованы с главным модулем 100 через переходники 104 (фиг.11-13) или 106 (фиг. 5). За счет этих переходников 104 или 106, вставляемых между установочной головкой 44 и штоком 42, с одной стороны, а также между направляющим устройством 74 и коробчатым корпусом главного модуля 100, с другой стороны, установочная головка 44 и направляющее устройство 74 могут быть смещены в радиальном направлении в соответствии с диаметром данной, недоступной для прохода трубы 14. К тому же колею самоходной тележки-робота 22 можно регулировать в соответствии с диаметром недоступной для прохода трубы 14. При этом целесообразно то, что с помощью соответствующего регулирования продольная ось самоходной тележки-робота 22, по меньшей мере, в основном, совпадает с продольной осью недоступной для прохода трубы 14. Наконец опорное колесо 70 установлено с возможностью складывания и откидывания в соответствии с диаметром недоступной для прохода трубы 14.
В частности, из фиг.10 видны также приводные валы 52, связанные с обоими ведомыми валами 34 вращающейся тарелки 32. Через один из обоих ведомых валов 34 вращающейся тарелки 32 вдвигают и выдвигают установочную головку 44. Другой ведомый вал 34 служит для складывания и откидывания опорного колеса 70 (см., в частности, также фиг.5-7).
Складывание и откидывание опорного колеса 70 происходит посредством червячной передачи 102 (см. , в частности, фиг.5, 7 и 10), причем приводимый соответствующим ведомым валом 34 червяк 108 находится в зацеплении с сегментом 110 червячного колеса, который жестко сидит на установленном на корпусе главного модуля 100 валу 112. Как лучше всего видно из фиг.7, опорное колесо 70 установлено с возможностью вращения на одном конце в данном случае двухколенного держателя 114, оба колена 114', 114'' которого закреплены другими концами на выступающих из корпуса главного модуля 100 концах вала 112. Оба колена 114', 114'' держателя 114 соединены между собой, по меньшей мере, одним поперечным раскосом 118.
Привод для движения установочной головки 44 включает в себя выполненный в виде зубчатой рейки 46 отрезок штока 42 и установленное на корпусе главного модуля 100, взаимодействующее с зубчатой рейкой 46 зубчатое колесо 48 (см. , в частности, фиг.5, 7 и 10). Для удержания зубчатой рейки 46 в зацеплении с цилиндрическим зубчатым колесом 48 напротив него предусмотрен опорный ролик 54. В данном случае, однако, зубчатое колесо 48 соединено с соответствующим приводным валом 52 не через зубчатый ремень, а через зубчатую передачу 120. Между несущим червяк 108 валом 124 и другим приводным валом 52 предусмотрена соответствующая зубчатая передача 122.
В остальном вдвигание и выдвигание установочной головки 44 происходит таким же образом, что и в описанном выше примере выполнения.
Как видно, в частности, из фиг.6 и 10, установочная головка 44 имеет два удаленных друг от друга в направлении продольной оси 22' ряда 56, 56' проходящих в направлении продольной оси приемных пазов 58, причем соосные между собой приемные пазы 58 обоих рядов 56, 56' предназначены для размещения одного и того же предмета 20. Как видно из фиг.10, в данном случае также средний приемный паз 58 соответствующего ряда пазов прочно расположен на установочной головке 44. В соответствии с этим все три предмета 20, такие, например, как кабели или защитные трубы для кабелей, одновременно вставляют в соответствующие скобы 18 (см., в частности, фиг.5 и 6). Для обеспечения этого скобы 18 в данном случае соответственно дальше удалены друг от друга.
В данном примере выполнения отсутствует направляющий хомут 94, предусмотренный в описанном выше примере выполнения.
Как можно видеть, в частности, на фиг.5, 8 и 9, направляющему устройству 74 придан направляющий рычаг 126, который расположен в зоне лежащих ближе к установочной головке 44 направляющих тел 88 с возможностью перемещения между положением удержания, в котором предметы 20, по меньшей мере, в основном, удерживаются в пазах 82' направляющих тел 88 или охвачены направляющим рычагом 126, и положением отпускания, в котором предметы 20 отпущены. Как лучше всего можно видеть на фиг.8 и 9, направляющий рычаг 126 может поворачиваться для этого вокруг оси 130, перпендикулярной продольной оси 22', в основном, на 90o. В удерживающем или направляющем положении направляющего рычага 126 это препятствует, таким образом, выходу предметов 20 из пазов 82' направляющих тел 88.
Если, например, при наступлении паводка робот необходимо выдвинуть из недоступной для прохода трубы 14, то направляющий рычаг 126 поворачивают вокруг оси 130 в положение отпускания, в котором предметы 20, образованные, например, защитными трубами или волоконно-оптическими кабелями, отпущены, так что робот может свободно двигаться в обоих направлениях. К тому же направляющий рычаг 126 облегчает ввод, в частности, трубо- или кабелеобразных предметов 20 в пазы 82' направляющих тел 88 при подготовке робота к монтажу.
Как можно видеть, в частности, на фиг.5 и 8, направляющее устройство 74 включает в себя образующий подобие коромысла 76 несущий хомут, установленный с возможностью качания на соединяемом с главным модулем 100 основании 132 (см., в частности, фиг.5). Это основание 132, как и главный модуль 100, остается таким же независимо от соответствующего диаметра недоступной для прохода трубы 14.
При повороте приданного коромыслу 76 направляющего рычага 126 в его положение отпускания содержащее направляющие тела 88, качающееся вокруг оси 134 коромысло самопроизвольно поворачивается вследствие своего веса вниз от предметов.
Оказалось, что для зажима защитных труб не требуется тормозное устройство. В этом случае может отпасть необходимость в тормозном устройстве, описанном в связи с предыдущим примером выполнения. Использование такого тормозного устройства может быть, однако, целесообразным, например, при прокладке кабелей.
Как следует, в частности, из фиг.5, 6 и 9, также в данном случае предусмотрена цветная телекамера 72, установленная с возможностью поворота вокруг оси, перпендикулярной продольной оси 22' (фиг.6). Телекамера 72 в данном случае установлена с возможностью поворота в основании 132. Кроме того, в данном случае дополнительно предусмотрена жестко установленная, ориентированная в радиальном направлении черно-белая камера 136 (см., в частности, фиг. 5). Эта черно-белая камера 136 может служить, в частности, для того, чтобы обнаруживать входы в недоступную для прохода трубу 14 и смещения трубы, а также установленные в недоступной для прохода трубе 14 опоры. При обнаружении, например, такой опоры робот продвигают вперед на отрезок между черно-белой камерой 136 и используемой для установки опор установочной головкой 44, так что эта установочная головка 44 располагается симметрично данной опоре.
Как лучше всего видно из фиг.10, с обеих сторон установочной головки 44 на корпусе главного модуля 100 расположены лазерные указатели 138, которые могут служить, в частности, в качестве устройства наведения для точного позиционирования соответствующей опоры или скоб 18. На фиг.10 параллельные друг другу лазерные лучи обозначены штрихпунктиром.
Снабженное направляющими телами 88, установленное на основании 134 с возможностью качания вокруг оси 134 коромысло 76 может поворачиваться в данном случае относительно основания 134 посредством, по меньшей мере, одного цилиндропоршневого блока 140. Коромысло 76 может быть, тем самым, принудительным образом сложено, например, при предстоящей эвакуации робота.
У данной формы выполнения, следовательно, независимо от диаметра недоступной для прохода трубы 14 можно использовать всегда одну и ту же самоходную тележку-робот 22, один и тот же главный модуль 100 и одно и то же направляющее устройство, включающее в себя в данном случае коромысло 76, а также основание 132 с камерами 72 и 136. Для подгонки робота к разным диаметрам недоступной для прохода трубы 14 установочную головку 44 и направляющее устройство 74 соединяют с главным модулем 100 через соответствующие переходники 104, 106 и/или соответствующее число переходников. К тому же опорное колесо 70 может складываться или откидываться в соответствии с диаметром недоступной для прохода трубы 14. К тому же колею самоходной тележки-робота 22 можно регулировать в соответствии с диаметром трубы.
На фиг.5 робот изображен в своем основном выполнении для недоступных для прохода труб 14 с внутренним диаметром, например, 300 мм. В этом случае между установочной головкой 44 и штоком 42 не требуется переходник. Направляющее устройство 74 закреплено на корпусе главного модуля 100 через относительно небольшой переходник 106 в виде плиты. Эта переходная плита может быть выполнена по-разному в зависимости от внутреннего диаметра недоступной для прохода трубы 14. Так, например, могут быть предусмотрены переходники для внутренних диаметров труб, например, 350, 400, 450, 500 и/или 600 мм. В принципе, однако, возможны также переходники для других внутренних диаметров труб. Фиг. 11-13 показывают вид сбоку части устройства по фиг.5 с переходниками 104, 106 для подгонки к другим разным внутренним диаметрам недоступной для прохода трубы 14.
Так, на фиг.11 изображен робот в выполнении для недоступных для прохода труб 14, внутренний диаметр которых составляет, например, около 350 мм. Как уже говорилось, в принципе, возможны и другие диаметры. Согласно фиг.11, между установочной головкой 44 и установленным в главном модуле 100 штоком 42 вставлен трубчатый переходник 104. Основание 134 направляющего устройства 74 закреплено на корпусе главного модуля 100 через переходник 106 в виде плиты, которая немного больше, чем при выполнении по фиг.5 и в данном случае уже немного выступает вверх за корпус главного модуля 100.
По сравнению с изображенным на фиг. 5 основным выполнением в данном случае, следовательно, установочная головка 44 и направляющее устройство 74 смещены радиально дальше наружу относительно главного модуля 100.
На фиг.12 изображено выполнение робота, рассчитанного на недоступные для прохода трубы немного большего внутреннего диаметра, здесь, например, 450 мм. Соответственно между установочной головкой 44 и установленным в главном модуле 100 штоком 42 вставлен соответственно более длинный трубчатый переходник 104. Приданное направляющему устройству 74 основание 134 закреплено на корпусе главного модуля 100 через соответственно больший переходник 106 в виде плиты. Как видно из сравнения фиг.12 и 11, в данном случае установочная головка 44 и направляющее устройство 74 смещены радиально наружу дальше на соответствующий отрезок.
На фиг.13 изображено выполнение робота для недоступных для прохода труб еще большего внутреннего диаметра, в данном случае, например, 600 мм. В этом случае между установочной головкой 44 и установленным в главном модуле 100 штоком 42 вставлены два трубчатых переходника 104. Приданное направляющему устройству 74 основание 134 закреплено на корпусе главного модуля 100 через еще большую переходную плиту. Соответственно в данном случае установочная головка 44 и направляющее устройство 74 смещены радиально наружу еще дальше.
На этой фиг.13 штриховой линией показано также повернутое вниз опорное колесо 70. При этом переходники 104, 106 и настройки выбраны, в частности, так, что средняя ось 22' робота, по меньшей мере, в основном, совпадает со средней осью недоступной для прохода трубы 14.
Трубчатые переходники 104 между установочной головкой 44 и штоком 42 могут иметь, например, в соответствии с градацией обычных условных проходов труб 14 длину, например, 25,5-75 мм. В частности, для больших условных проходов могут быть скомбинированы между собой также два или более переходников. При этом скомбинированные между собой переходники могут иметь одинаковую длину или же могут быть, по меньшей мере, частично разной длины.
В остальном описанная с помощью фиг.5-13 форма выполнения может, по меньшей мере, в основном, иметь ту же конструкцию, что и описанная выше форма выполнения.
Изобретение относится к электротехнике, в частности к устройству для вставки удлиненных предметов в скобы. Устройство 10 предназначено для вставки удлиненных предметов 20, таких как кабели или трубы, в скобы 18, которые расположены внутри недоступной для прохода трубы 14. Устройство содержит канальную тележку-робот 22 с установленным на нем рабочим блоком 24. Последний снабжен установочной головкой 44, выполненной с возможностью перемещения в радиальном направлении посредством привода 46, 48. Установочная головка 44 имеет два ряда 56, 56' по три проходящих в продольном направлении приемных паза 58, 58'. Последние предназначены для размещения каждый одного предмета 20. Средние приемные пазы 58' расположены на установочном элементе 62, который выступает за соседние приемные пазы 58 и выполнен с возможностью отвода назад, преодолевая усилие пружины 64 сжатия. Рабочий блок 24 оборудован направляющим устройством 74 для, по меньшей мере, приблизительно параллельного ведения предметов 20. С помощью устройства 10 можно за одну операцию вставлять в скобы 18 вместе до трех предметов 20. Техническим результатом предложенного решения является создание устройства простого по конструкции, которое имеет высокую производительность. 14 з.п. ф-лы, 13 ил.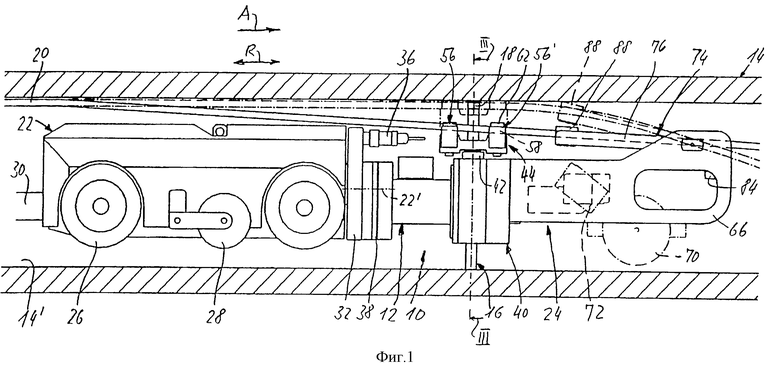
| УСТРОЙСТВО ДЛЯ ЗАТЯГИВАНИЯ ИЗДЕЛИЙ В КАНАЛЫ | 1988 |
|
RU2043685C1 |
| RU 20225853 C1, 30.12.1994 | |||
| Механизм привода подачи бревен в лесопильные станки | 1956 |
|
SU109739A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ 2,5-ДИМЕТИЛТЕРЕФТАЛЕВОГО АЛЬДЕГИДА В ПИРОМЕЛЛИТОВОМ ДИАНГИДРИДЕ | 0 |
|
SU251907A1 |

