Изобретение относится к области диспетчерского управления монорельсовыми транспортными системами с электрической тягой и предназначено для использования при осуществлении ритмичных, комфортных и безопасных пассажироперевозок.
Известен способ управления движением поездов по трассе, основанный на отправлении поездов со станций в соответствии с установленным расписанием и в зависимости от времени прибытия поездов и предусматривающий ускорение или задержку отправления того или иного поезда при изменении эксплуатационных условий (US 3575594 А, В 61 L 27/00, 20.04.1971). Управление движением поезда по перегону трассы осуществляют, как правило, путем измерения текущих параметров движения и соответствующих воздействий на тяговые двигатели (DE 3107102 А1, В 61 L 27/00, 02.09.1982).
Недостатки известных способов определяются невысокой точностью поддержания интервалов движения между соседними составами, обусловленной наличием лишь "номинального" графика движения, несовершенным использованием резервов по времени и малыми возможностями варьирования графиком.
Наиболее близкими к предложенной группе изобретений являются способы управления движением электроподвижных составов монорельсовой транспортной системы по трассе и ее перегону, заключающиеся в программировании управления, измерении текущих параметров движения, сопоставлении их с заданными и формировании соответствующих управляющих сигналов для тяговых электроприводов (RU 2167403 C1, G 01 М 17/08, 20.05.2001).
Недостатки указанных способов также связаны с отсутствием надлежащей гибкости в управлении движением.
Задачей изобретения является обеспечение высокой точности выполнения графика движения составов по приходу на станции, оперативного принятия решений и их отработки.
Поставленная задача решается тем, что в способе управления движением электроподвижных составов монорельсовой транспортной системы по трассе, состоящей из нескольких станций и перегонов между ними, согласно которому в системе диспетчерского управления создают программы управления движением составов на отдельных перегонах трассы с ограничением по максимально допустимой скорости движения Vmax на различных участках перегона и поддержанием требуемого интервала движения между соседними составами Ттр.инт и в соответствии с созданными программами формируют управляющие сигналы для тяговых электроприводов составов, - для каждого из перегонов трассы заранее составляют и заносят в память сервера системы диспетчерского управления "номинальный" график движения составов по перегону, рассчитываемый из условия наличия запаса скорости движения состава по участкам перегона относительно максимально допустимой скорости движения Vmax на этих участках, и "ускоренный" график, рассчитываемый из условия отсутствия запаса скорости движения состава относительно Vmax, каждый из графиков движения состава по перегону трассы представляют в виде совокупности фазовых координат целевых точек, задающих требуемые параметры движения состава в этих точках и характеризующих рассматриваемый участок перегона между целевыми точками, и включают в указанную совокупность координату точки окончания j-го характерного участка k-го перегона Skj, требуемую скорость движения состава в точке окончания характерного участка Vтр.kj, требуемое время прихода состава в точку окончания характерного участка Tтр.kj, резерв времени по уменьшению требуемого времени прихода состава в точку окончания характерного участка перегона ΔTтр.kj и максимально допустимую скорость движения состава на рассматриваемом участке перегона Vmaxkj, рассчитывают общее время движения Тобщ одного состава по всей трассе с учетом заданного "номинального" времени стоянки состава на станциях Тост и "номинальных" графиков движения состава по перегонам трассы, для каждого допустимого количества используемых составов N определяют требуемый интервал движения между соседними составами Ттр.инт как отношение Тобщ/N, выявляют места начальной расстановки составов по трассе и времена начала их движения в автоматическом режиме из условия обеспечения Ттр.инт, в процессе работы транспортной системы в автоматическом режиме по прибытии i-го состава на n-ю станцию в системе диспетчерского управления назначают ему "номинальный" или "ускоренный" график движения по следующему n-му перегону до (n+1)-й станции из условия поддержания Ттр.инт.
По прибытии i-го электроподвижного состава на n-ю станцию в системе диспетчерского управления контролируют выполнение им требуемого графика движения по (n-1)-му перегону путем сбора информации о фактическом времени стоянки i-го состава на (n-1)-й станции и фактическом времени его прихода на n-ю станцию, рассчитывают величину текущего отклонения интервала движения Тинт.i от требуемого интервала движения Ттр.инт между составами ΔTтр.инт(n)i в соответствии с выражением
где ΔTинт(n-1)i - величина текущего отклонения интервала движения Тинт.i от требуемого интервала движения Ттр.инт на (n-1)-й станции, ΔTост(n-1)i - отклонение фактического времени стоянки i-го состава на (n-1)-й станции от требуемого "номинального" времени стоянки Ттр.ост, ΔT(n-1)i - отклонение фактического времени прихода i-го состава на n-ю станцию от требуемого времени движения по (n-1)-му перегону Ттр.(n-1) для "номинального" графика движения.
Во время стоянки i-го электроподвижного состава на n-й станции в системе диспетчерского управления сравнивают значение ΔTинт(n)i текущего отклонения величины Tинт.i от требуемого интервала движения между соседними составами Ттр.инт с некоторыми величинами ΔT1 и ΔT2 допустимого отставания Тинт.i, при выполнении условия ΔTинт(n)i≤ΔT1 в системе диспетчерского управления назначают i-му составу "номинальный" график движения на n-м перегоне, при выполнении условия ΔT1<ΔTинт(n)i≤ΔT2 в системе диспетчерского управления в соответствии с полученным ΔTинт(n)i и суммарным резервом времени для уменьшения требуемого "номинального" времени хода состава ΣΔTkj по характерным участкам n-го перегона назначают i-му составу "ускоренный" график движения по n-му перегону и не вмешиваются в движение остальных составов, а при выполнении условия ΔTинт(n)i>ΔT2 в системе диспетчерского управления назначают i-му составу "ускоренный" график движения на n-м перегоне и увеличивают времена стоянки остальных составов на станциях с целью перехода к условию ΔT1<ΔTинт(n)i≤ΔT2.
Поставленная задача решается также тем, что в способе управления движением электроподвижного состава монорельсовой транспортной системы по перегону трассы, согласно которому измеряют пройденный путь S, текущую скорость движения состава V, текущее время движения по перегону Ттек, определяют требуемую скорость движения Vтр и формируют управляющий сигнал для тягового электропривода состава в зависимости от значений Vтр и V, - заранее рассчитывают и заносят в память бортовой системы управления фазовые координаты границ характерных участков рассматриваемого перегона трассы, включающие в себя координату точки окончания характерного k-го участка Sк, требуемую скорость в конце этого участка Vтр.к и требуемое время прихода состава в точку окончания характерного участка Ттр.к, в процессе движения по перегону требуемую скорость движения Vтр вычисляют дискретно с некоторым тактом Тас, исходя из условия обеспечения дальнейшего равномерного движения состава, в соответствии с выражением
Vтр = (Sк-S)/(Tтр.к-Tтек), (2)
при достижении границы одного характерного участка перегона в качестве координат целевой точки принимают фазовые координаты точки окончания следующего характерного участка и продолжают процесс вычисления требуемой скорости движения Vтр, после достижения точки начала характерного участка торможения перед остановкой на станции дискретно вычисляют требуемую скорость движения Vтр, исходя из условия обеспечения дальнейшего равнозамедленного движения:
Vтр = V
где V
dVтр/dτ - требуемое ускорение движения,
а величину требуемого ускорения движения dVтр/dτ□ вычисляют по выражению:
где Kа - масштабный коэффициент.
В процессе движения состава на участке перед участком торможения для остановки на станции в системе управления электроподвижного состава дискретно с тактом Тас пересчитывают координату точки начала участка торможения Sн.т в соответствии с выражением
Sн.т = Sк-V2/2(dVж/dτ), (5)
где dVж/dτ - величина желаемого ускорения на участке торможения, которую определяют как
dVж/dτ = Kтор(dVmax/dτ), (6)
где dVmax/dτ - максимально допустимое ускорение на участке торможения,
Kтор - коэффициент запаса по ускорению.
На фиг.1 представлена структурная схема СУ ЭПС при управлении продольным движением ЭПС по перегону трассы.
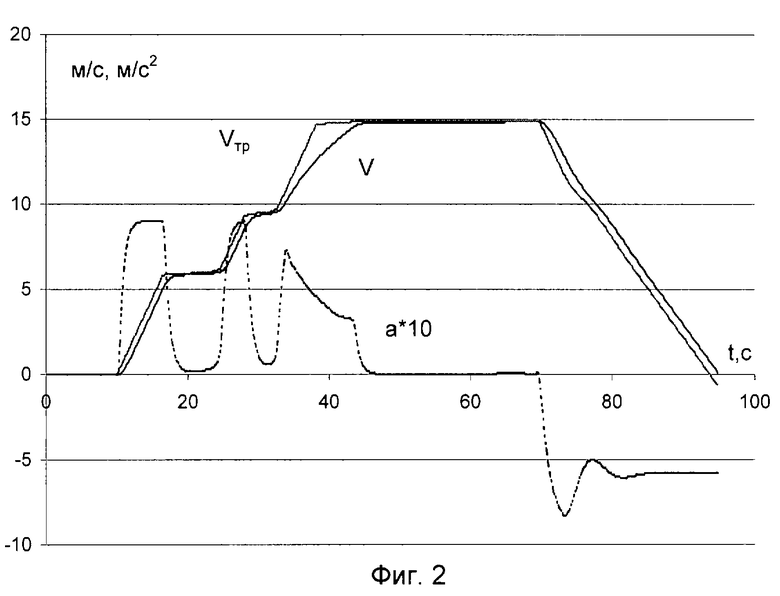
На фиг. 2 приведены параметры процесса управления движением ЭПС в номинальном режиме.
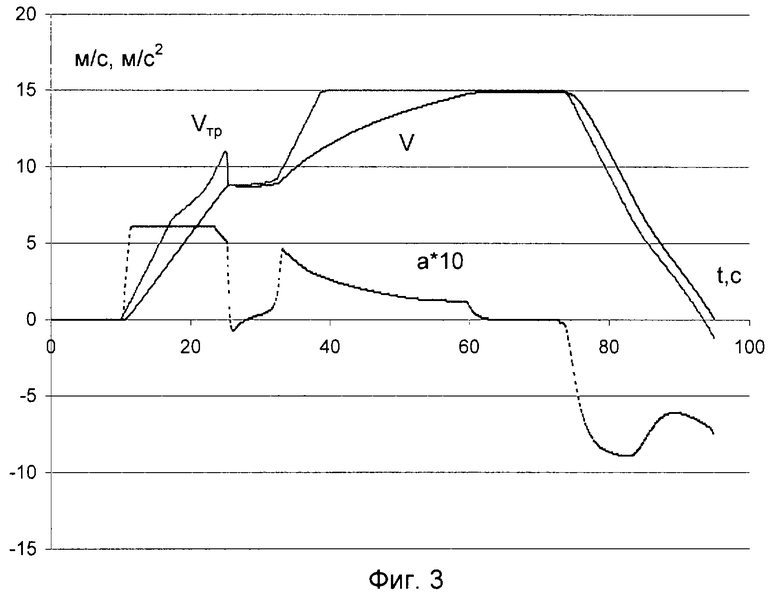
На фиг. 3 приведены параметры процесса управления движением ЭПС в возмущенном режиме (при 5 работающих тяговых двигателей из 7 имеющихся).
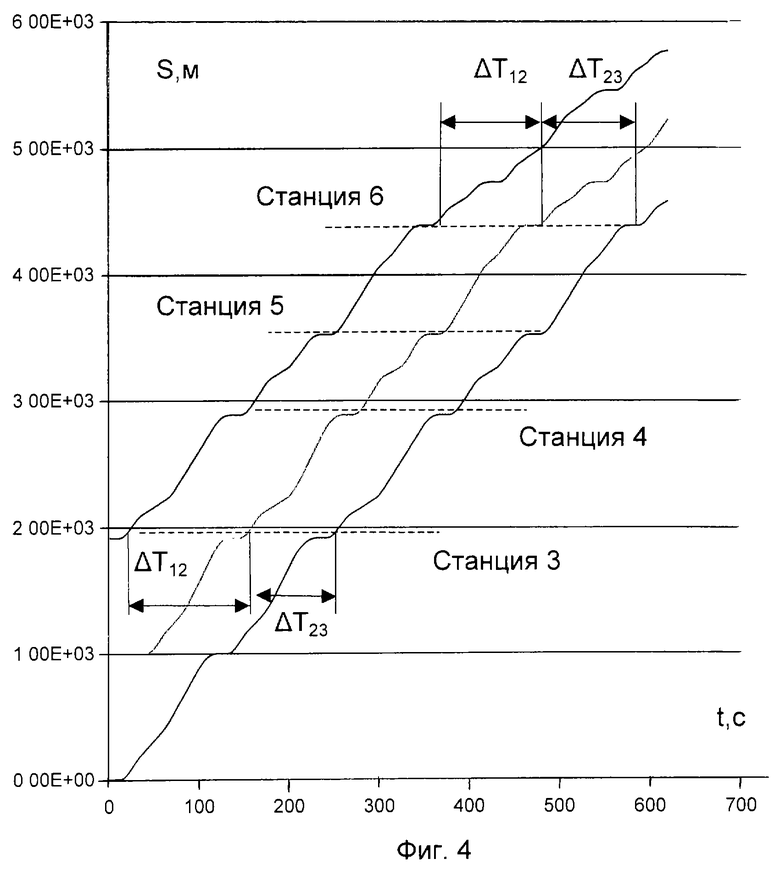
На фиг. 4 приведены параметры процесса управления совместным движением 3-х ЭПС по перегонам трассы.
Предложенные способы управления движением электроподвижных составов монорельсовой транспортной системы по трассе и ее перегону реализуются следующим образом.
Для обеспечения организации и управления движением совокупности ЭПС принимается следующее распределение задач между структурными подсистемами СУ ТС:
СУ ЭПС - осуществляет непосредственное управление текущим движением "своего" ЭПС согласно временному графику движения, сформированному СЦДУ, путем формирования требуемой скорости движения Vтр и управляющего сигнала на тяговые приводы в соответствии с сочетанием требуемой и текущей скоростей движения.
СЦДУ - наблюдает за движением всех ЭПС и общим состоянием подсистем ТС и управляет совместным движением всех ЭПС на трассе ТС. Данное управление выражается в назначении общего временного графика движения ЭПС по перегонам трассы для штатного режима работы и переназначении графиков движения конкретных ЭПС по конкретным перегонам при возникновении нештатной ситуации.
СУС - осуществляет непосредственное управление работой путевого и станционного оборудования в зоне своей ответственности и участвует в обмене информацией между СЦДУ, СУС и СУ ЭПС.
Способ управления продольным движением ЭПС на трассе ТС учитывает следующие требования по условиям пассажироперевозок и ограничения, накладываемые геометрическими характеристиками трассы:
- ЭПС должен стоять на станции некоторое время ΔΤост, требуемое для посадки и высадки пассажиров;
- на перегонах трассы существуют криволинейные участки, на которых допустимая скорость движения ЭПС Vmax должна быть ограничена;
- для поддержания ритмичности пассажироперевозок ЭПС должен приходить на станцию в заданное время.
Для обеспечения организации и управления движением в соответствии с этими требованиями и ограничениями принимается следующая последовательность подготовительных действий и действий СЦДУ, СУС и СУ ЭПС во время работы СУ ТС:
- Вся трасса разбивается на перегоны, границами которых являются точки остановки ЭПС в автоматическом режиме работы.
- Каждый перегон разбивается на характерные участки, т.е. на участки, для которых допустимая скорость движения Vmax различна.
- Для каждого перегона СЦДУ задает время стоянки ЭПС на станции ΔТocт и формирует временной график движения ЭПС по перегону, задающий только времена прибытия ЭПС в точки, являющиеся границами характерных участков, координаты этих точек и требуемую скорость в точке окончания характерного участка.
- Данный временной график движения передается из СЦДУ в СУ ЭПС до начала работы ТС и подтверждается или корректируется (при необходимости изменить график для парирования нештатной ситуации) во время стоянки ЭПС на каждой станции.
- Требуемую (программную) скорость движения ЭПС Vтр формирует СУ ЭПС непосредственно в процессе движения в соответствии с требуемыми значениями кинематических параметров движения в точке окончания характерного участка и их текущими значениями.
- В процессе работы СУ ЭПС автономно формирует управляющие сигналы на тяговый электропривод в соответствии с сочетанием требуемого и текущего значений скорости движения.
Временной график движения ЭПС по перегонам трассы формируется в виде набора фазовых координат целевых точек, задающих требуемые параметры движения ЭПС в точках начала и окончания характерных участков трассы и характерные параметры этих участков. Под фазовыми координатами целевой точки понимается совокупность шести параметров:
Sк - координата (криволинейная, по длине пройденного пути) точки окончания характерного участка трассы;
Vк - требуемая скорость в точке окончания характерного участка трассы;
Тк - требуемое время прихода ЭПС в точку окончания характерного участка трассы;
Pr1 - признак характерного участка трассы для выбора алгоритма управления продольным движением ЭПС;
ΔTк - резерв времени по уменьшению требуемого времени прихода ЭПС в точку окончания характерного участка трассы;
Vmax - допустимая скорость движения ЭПС на характерном участке трассы.
Разбиение всей трассы на характерные участки производится с учетом координат станций, длин и радиусов кривизны криволинейных участков трассы, координат стрелочных переводов. Предварительный расчет требуемых времен прихода ЭПС в точки окончания характерных участков трассы проводится аналитически с учетом длин этих участков и ограничений по Vmax для них. Точное определение требуемых времен прихода ЭПС в точки окончания характерных участков трассы Тк и резерв времени ΔTк (т.е. время, на которое можно сократить время прохода ЭПС всего характерного участка при движении со скоростью, близкой к Vmax) для этих участков производится путем моделирования движения ЭПС по трассе с учетом требуемых ограничений на скорость и ускорение, динамики тяговых приводов ЭПС, ограничений на их мощность и принятых алгоритмов управления продольным движением ЭПС.
Для каждого перегона формируются два графика движения ЭПС - "номинальный" и "ускоренный" (для ускоренного графика все ΔTк равны 0). Сформированные временные графики движения (номинальный и ускоренный) для каждого перегона трассы заносятся в память СЦДУ.
Управление совместным движение ЭПС производится по принципу поддержания заданного интервала попутного следования. Величина интервала Тинт определяется временем, необходимым для прохода одного ЭПС по всей трассе в двух направлениях (Тобщ), и количеством используемых ЭПС (N)
Tинт = Tобщ/N, (7)
Управление совместным движением ЭПС выражается в коррекции графиков движения конкретных ЭПС для поддержания требуемого интервала движения. При нарушении одним (или несколькими) ЭПС требуемого интервала движения (задержка прибытия на станцию, задержка отправления со станции и т.д.), СЦДУ по величине отклонения ΔTинт и имеющемуся резерву времени ΔTк на последующих характерных участках трассы корректирует времена прибытия ЭПС в точки окончания этих участков Тк и время стоянки на станции ΔTост для восстановления требуемого интервала движения ЭПС.
Для управления совместным движением ЭПС СЦДУ собирает и обрабатывает информацию о следующих параметрах движения каждого ЭПС:
- Идентификационный ЭПС.
- Допустимое отклонение от требуемого интервала движения ΔTдоп, сек.
- Текущее отклонение от требуемого интервала движения ΔTинт, сек.
- Идентификационный перегона, на котором находится ЭПС.
- Резерв по времени стоянки на следующей станции ΔTост =, сек.
- Резерв по времени движения ЭПС на следующем перегоне ΔTк, сек.
- Признак используемого графика движения на текущем перегоне.
- Признак используемого графика движения на следующем перегоне.
- Отклонение по времени прихода ЭПС на последнюю станцию ΔTприх, сек.
- Отклонение по времени ухода ЭПС с последней станции ΔTух, сек.
Данные параметры изменяются по факту прихода и ухода каждого ЭПС со станций. Опоздание по приходу на станцию и уходу с нее увеличивает ΔTинт. При выполнении условия ΔTинт<ΔTдоп отставание i-го ЭПС не влияет на движение следующих за ним ЭПС, и поэтому для восстановления требуемого интервала движения СЦДУ переводит отставший ЭПС на ускоренный график движения или использует резервы по ΔTост до устранения (обнуления) ΔTинт и не вмешивается в движение остальных ЭПС. При условии ΔTинт≥ΔTдоп СЦДУ "ускоряет" движение i-го ЭПС и "тормозит" движение остальных составов путем увеличения времен их стоянки на станциях для избежания наезда ЭПС на закрытые блок-участки и вызываемой этим остановки ЭПС на перегоне между станциями.
Управление продольным движением ЭПС выражается в управлении скоростью движения V, поэтому СУ ЭПС включает в себя контур обратной связи по ошибке ΔV и контур формирования требуемой скорости движения Vтр с учетом выданного графика движения ЭПС по перегону трассы и ограничений на допустимую скорость Vmax и допустимое ускорение amax (фиг.1).
СУ ЭПС дискретно с некоторым шагом Тас производит расчет требуемой скорости движения Vтр непосредственно в процессе движения ЭПС по перегону (Тас~30-50 мсек). Такой малый такт пересчета требуемой скорости движения Vтр позволяет обеспечить инвариантность разработанного способа управления движением ЭПС к действующим возмущениям и обуславливает высокую точность обеспечения требуемых конечных условий по времени и месту остановки состава на станции.
Терминальный алгоритм формирования требуемой скорости движения ЭПС Vтр на участке торможения перед остановкой на станции строится исходя из гипотезы о дальнейшем равнозамедленном движении состава до точки остановки на станции, т.е.

где  - значение требуемого ускорения на n-м такте работы блока формирования Vтр;
- значение требуемого ускорения на n-м такте работы блока формирования Vтр;
V
Тас - длительность такта работы СУ ЭПС по формированию управляющего сигнала на исполнительные органы ЭПС;
V
V - текущая скорость движения ЭПС;
а - масштабный коэффициент.
Терминальный алгоритм формирования требуемой скорости движения ЭПС Vтр на остальных характерных участках строится исходя из гипотезы о дальнейшем равномерном движении состава до точки окончания характерного участка трассы, т.е.
где S, Sк - координаты текущего положения и требуемого конечного положения ЭПС в точке окончания характерного участка трассы;
τ, τк - текущее время и требуемое время достижения ЭПС конца рассматриваемого участка согласно временному графику движения.
На фиг. 2-3 представлены результаты математического моделирования процессов управления движением ЭПС по перегонам перспективной трассы монорельсового транспорта для номинального и возмущенного (максимальная загрузка состава и 5 работающих из 7 имеющихся на ЭПС тяговых приводов) режимов при использовании разработанных терминальных алгоритмов управления движением ЭПС. Проведенное математическое моделирование процессов управления движением ЭПС по перегонам трассы показало, что для широкой области возможных сочетаний по геометрическим характеристикам перегонов трассы (S~300-2000 м) и загрузки состава (m~35000-55000 кг) обеспечивается высокая точность прихода ЭПС на станцию:
|ΔSк|≤0,03 м, |ΔTk|≤0,5 c, (10)
На фиг. 4 представлены результаты моделирования процесса управления совместным движением 3-х ЭПС с целью обеспечения требуемого интервала попутного следования при использовании "ускоренного" графика движения среднего ЭПС по перегонам трассы до достижения требуемого интервала и последующего перехода на "номинальный" график.
Таким образом результаты проведенного математического моделирования подтверждают работоспособность и эффективности предлагаемого способа организации работы СУ ТС по управлению движением совокупности ЭПС и разработанных терминальных алгоритмов работы СУ ЭПС по управлению движением "своего" состава.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МАНЕВРОВЫМИ РАБОТАМИ В ЭЛЕКТРОДЕПО МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2004 |
|
RU2247047C1 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ПОДВИЖНЫМ СОСТАВОМ С ЛИНЕЙНЫМ ПРИВОДОМ | 2001 |
|
RU2180295C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНЫХ СОСТАВОВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ ПО ТРАССЕ С ИСПОЛЬЗОВАНИЕМ АВТОМАТИЗИРОВАННОЙ СИСТЕМЫ | 2003 |
|
RU2228278C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2003 |
|
RU2249525C1 |
| ПОДВИЖНОЙ СОСТАВ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ | 2001 |
|
RU2188775C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ МОНОРЕЛЬСОВОЙ ТРАНСПОРТНОЙ СИСТЕМЫ НАВЕСНОГО ТИПА И МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА НАВЕСНОГО ТИПА | 2000 |
|
RU2160678C1 |
| КОСМИЧЕСКИЙ РАКЕТНЫЙ КОМПЛЕКС И СПОСОБ ОБЕСПЕЧЕНИЯ УСЛУГ ПО ЗАПУСКУ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2001 |
|
RU2179941C1 |
| СПОСОБ ВЫВОДА ПОЛЕЗНОГО ГРУЗА В ОКОЛОЗЕМНОЕ ПРОСТРАНСТВО С ИСПОЛЬЗОВАНИЕМ АВИАЦИОННОГО РАКЕТНО-КОСМИЧЕСКОГО КОМПЛЕКСА И АВИАЦИОННЫЙ РАКЕТНО-КОСМИЧЕСКИЙ КОМПЛЕКС | 2005 |
|
RU2265558C1 |
| Монорельсовая транспортная система | 2023 |
|
RU2826677C1 |
| СПОСОБ ЗАПУСКА МНОГОСТУПЕНЧАТОЙ КОСМИЧЕСКОЙ РАКЕТЫ-НОСИТЕЛЯ С ИСПОЛЬЗОВАНИЕМ САМОЛЕТА-НОСИТЕЛЯ И МНОГОСТУПЕНЧАТАЯ РАКЕТА-НОСИТЕЛЬ | 2005 |
|
RU2265559C1 |
Группа изобретений относится к области диспетчерского управления монорельсовыми транспортными средствами. В системе диспетчерского управления создают программы управления движением составов на перегонах трассы и формируют управляющие сигналы для тяговых электроприводов. Для каждого из перегонов составляют и заносят в память сервера "номинальный" и "ускоренный" графики движения составов, рассчитывают время движения одного состава по всей трассе с учетом заданного "номинального" времени стоянки на станциях и "номинальных" графиков движения по перегонам. Определяют требуемый интервал движения между составами и выявляют места начальной их расстановки по трассе и времена начала движения. По прибытии состава на станцию контролируют выполнение графика движения по перегону с учетом времени стоянки на предыдущей станции и времени прихода на данную станцию и рассчитывают величину отклонения интервала движения от требуемого. Кроме того, заранее рассчитывают и заносят в память фазовые координаты границ характерных участков перегона трассы, включающие в себя координату точки окончания характерного участка, требуемую скорость в его конце и требуемое время прихода в точку окончания. Изобретения обеспечивают повышенную точность выполнения графика движения составов, оперативное принятие решений и их отработку. 2 с. и 3 з.п. ф-лы, 4 ил.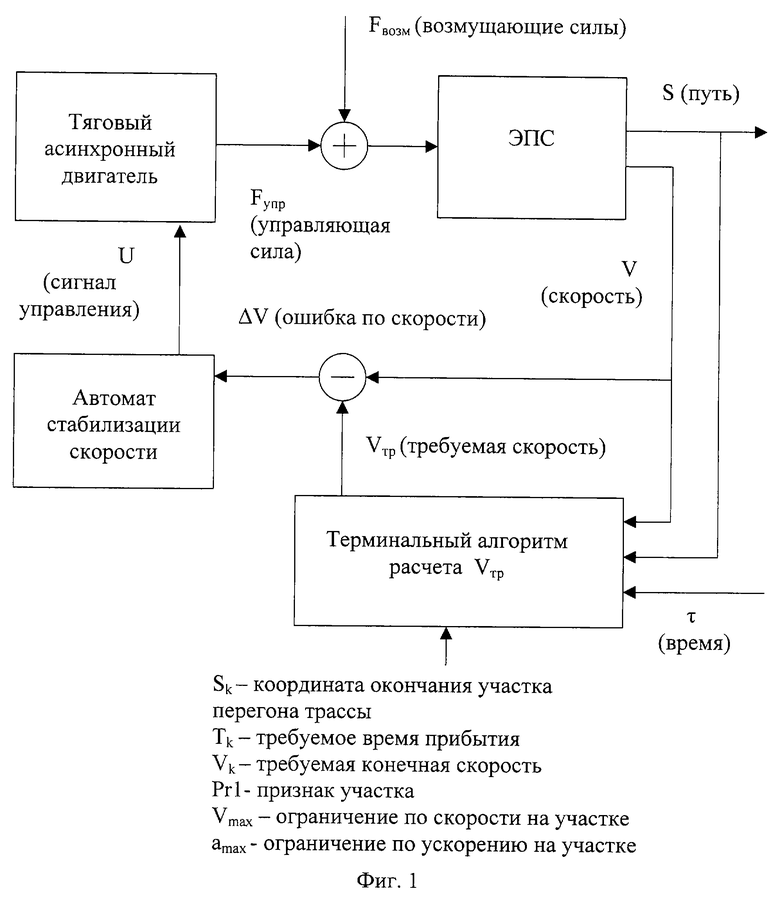
где ΔTинт.(n-1)iT - величина текущего отклонения интервала движения Тинт.i от требуемого интервала движения Ттр.инт на (n-1)-ой станции;
ΔTост.(n-1)i - отклонение фактического времени стоянки i-го состава на (n-1)-ой станции от требуемого "номинального" времени стоянки Ттр.ост;
ΔT(n-1)i - отклонение фактического времени прихода i-го состава на n-ую станцию от требуемого времени движения по (n-1)-му перегону Ттр.(n-1) для "номинального" графика движения.
4. Способ управления движением электроподвижного состава монорельсовой транспортной системы по перегону трассы, согласно которому измеряют пройденный путь S, текущую скорость движения состава V, текущее время движения по перегону Ттек., определяют требуемую скорость движения Vтр и формируют управляющий сигнал для тягового электропривода состава в зависимости от значений Vтр. и V, отличающийся тем, что заранее рассчитывают и заносят в память бортовой системы управления фазовые координаты границ характерных участков рассматриваемого перегона трассы, включающие в себя координату точки окончания характерного k-го участка Sк, требуемую скорость в конце этого участка Vтр.к и требуемое время прихода состава в точку окончания характерного участка Ттр.к, в процессе движения по перегону требуемую скорость движения Vтр вычисляют дискретно с некоторым тактом Тас, исходя из условия обеспечения дальнейшего равномерного движения состава, в соответствии с выражением
Vтр= (Sк-S)/(Tтр.к-Tтек),
при достижении границы одного характерного участка перегона в качестве координат целевой точки принимают фазовые координаты точки окончания следующего характерного участка и продолжают процесс вычисления требуемой скорости движения Vтр, после достижения точки начала характерного участка торможения перед остановкой на станции дискретно вычисляют требуемую скорость движения Vтр, исходя из условия обеспечения дальнейшего равнозамедленного движения
Vтр = V
где V
dVтр/dτ - требуемое ускорение движения,
а величину требуемого ускорения движения dVтр/dτ вычисляют по выражению
где Kа - масштабный коэффициент.
Sн.т = Sк-V2/2(dVж/dτ),
где dVж/dτ - величина желаемого ускорения на участке торможения, которую определяют как
dVж/dτ = (dVmax/dτ)Kтор,
где dVmax/dτ - максимально допустимое ускорение на участке торможения;
Kтор - коэффициент запаса по ускорению.
| RU 2167403 C1, 20.05.2001 | |||
| DE 3107102 A1, 02.09.1982 | |||
| US 3575594 А, 20.04.1971 | |||
| US 6109568 А, 29.08.2000. |

