Изобретение относится к области стабилизации частот генераторного оборудования и может найти применение в аппаратуре связи, радиолокации, обработки информации, в измерительной технике и т.д.
Известен способ фазовой автоматической подстройки частоты (ФАПЧ) [1-3], в котором используется опорный высокостабильный генератор, являющийся эталонным. Сигналы частот от эталонного и подстраиваемого генераторов поступают на фазовый детектор, выходное напряжение которого определяется разностью фаз напряжений, действующих на его входах. Сигнал, пропорциональный выходному напряжению фазового детектора, воздействует на управляемый элемент, который изменяет частоту подстраиваемого генератора, приближая ее к частоте эталонного. Недостатками способа являются невозможность получения колебаний или импульсных последовательностей с относительной нестабильностью частоты меньшей, чем у эталонного генератора, а также необходимость, для решения задачи стабилизации, выполнения требования равенства номинальных значений частот выходных сигналов стабилизируемого и эталонного генераторов, которые, как правило, отличаются друг от друга, что обуславливает использование дополнительных устройств для их преобразований.
Целью изобретения является повышение стабильности частоты выходного сигнала подстраиваемого стабилизируемого генератора путем уменьшения ее относительной нестабильности по отношению к относительной нестабильности частоты выходного сигнала генератора, выбранного в качестве опорного.
Сущность изобретения заключается том, что в качестве опорного используют генератор, имеющий меньшую среднюю скорость отклонения частоты его выходного сигнала относительно ее номинального значения по сравнению со средней скоростью отклонения частоты выходного сигнала относительно ее номинального значения у стабилизируемого генератора, измеряют числа периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами соответственно за один и тот же временной интервал измерений, и на основании результатов этих измерений формируют управляющий сигнал для изменения частоты выходного сигнала стабилизируемого генератора, обеспечивающий уменьшение отклонений частоты выходного сигнала этого генератора от ее номинального значения.
Для этого отдельным задающим генератором формируют временной интервал измерений ТИ, который определяется выражением
ТИ=Т0Δt, (1)
где Т0 - длительность абсолютно стабильного временного интервала измерений;
Δt - абсолютная нестабильность временного интервала измерений, обусловленная нестабильностью частоты выходного сигнала генератора, задающего временной интервал измерений.
В процессе измерений за время ТИ подсчитывают число периодов колебаний или импульсов N1изм и N2изм выходных сигналов стабилизируемого и опорного генераторов соответственно. Определяют номинальные значения чисел N1 и N2 периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами соответственно в течение абсолютно стабильного временного интервала измерений (считая, что ТИ=Т0 и частоты выходных сигналов стабилизируемого и опорного генераторов являются абсолютно стабильными). Находят ΔN1 и ΔN2 - отклонения от номинальных значений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов за реальный временной интервал измерений, причем
Величины ΔN1 и ΔN2 складываются из отклонений чисел периодов колебаний или импульсов  выходных сигналов стабилизируемого и опорного генераторов соответственно, которые обусловлены собственными нестабильностями частот выходных сигналов этих генераторов, а также из отклонений
выходных сигналов стабилизируемого и опорного генераторов соответственно, которые обусловлены собственными нестабильностями частот выходных сигналов этих генераторов, а также из отклонений  обусловленных нестабильностью временного интервала измерений. При этом
обусловленных нестабильностью временного интервала измерений. При этом
Абсолютные значения отклонений частот выходных сигналов Δf1 - стабилизируемого и Δf2 - опорного генераторов соответственно за временной интервал измерений ТИ определяются следующим образом:
Средние скорости  отклонений от номинальных значений частот выходных сигналов стабилизируемого и опорного генераторов соответственно за временной интервал измерений определяются формулами
отклонений от номинальных значений частот выходных сигналов стабилизируемого и опорного генераторов соответственно за временной интервал измерений определяются формулами
Средние скорости  отклонений от номинальных значений частот выходных сигналов стабилизируемого и опорного генераторов соответственно за временной интервал измерений при условии, что эти отклонения вызваны только собственными нестабильностями частот стабилизируемого и опорного генераторов, определяются соотношениями
отклонений от номинальных значений частот выходных сигналов стабилизируемого и опорного генераторов соответственно за временной интервал измерений при условии, что эти отклонения вызваны только собственными нестабильностями частот стабилизируемого и опорного генераторов, определяются соотношениями
Находят математическое ожидание отношения средних скоростей  при выполнении условия равенства средних скоростей
при выполнении условия равенства средних скоростей  Это отношение принимают в качестве эталонного коэффициента пропорциональности КЭТ и определяют в соответствии с выражением
Это отношение принимают в качестве эталонного коэффициента пропорциональности КЭТ и определяют в соответствии с выражением
где f1 и f2 - номинальные значения частот выходных сигналов стабилизируемого и опорного генераторов соответственно;
δo - долговременная относительная нестабильность частоты выходного сигнала генератора, задающего временной интервал измерений;
δ2 - долговременная относительная нестабильность частоты выходного сигнала опорного генератора.
Необходимо отметить, что отношение средних скоростей  за временной интервал измерений TИ равно отношению измеренных за этот временной интервал измерений значений величин ΔN1 и ΔN2 соответственно, т.е.
за временной интервал измерений TИ равно отношению измеренных за этот временной интервал измерений значений величин ΔN1 и ΔN2 соответственно, т.е.
По результатам одновременных измерений величин ΔN1 и ΔN2/ в течение одного и того же временного интервала измерений ТИ и с учетом отклонения от эталонного коэффициента пропорциональности КЭТ величины реального (по результатам измерений) отношения ΔN1/ΔN2 вырабатывают управляющий сигнал для такого изменения частоты выходного сигнала стабилизируемого генератора, которое обеспечит выполнение условия
Выполнение условия (9) соответствует равенству средних скоростей  и обеспечивает выполнение соотношения
и обеспечивает выполнение соотношения
где  долговременная относительная нестабильность частоты подстраиваемого стабилизируемого генератора.
долговременная относительная нестабильность частоты подстраиваемого стабилизируемого генератора.
При выполнении соотношения (10) и соблюдении условия f1>>f2 получают возможность уменьшения долговременной относительной нестабильности частоты выходного сигнала стабилизируемого генератора по отношению к долговременной относительной нестабильности частоты выходного сигнала опорного генератора. При выборе значений частот f1>>f2 уменьшение долговременной относительной нестабильности частоты выходного сигнала стабилизируемого генератора по отношению к долговременной относительной нестабильности частоты выходного сигнала опорного генератора будет значительным. Таким образом, обеспечивается возможность повышения долговременной относительной стабильности частоты выходного сигнала стабилизируемого генератора.
Алгоритмы достижения выполнения условия
могут быть различными.
Управляющий сигнал для коррекции частоты стабилизируемого генератора формируют на основе коэффициента управления Купр, полученный либо в соответствии с выражением
Kупр = Kупр1 = ΔN1-ΔN2KЭТ, (12)
либо в соответствии с выражением
Как видно из выражений (12) и (13)
Kупр1 = Kупр2ΔN2. (14)
Независимо от используемых коэффициента управления и алгоритма достижения выполнения условия ΔN1/ΔN2 = KЭT физическая сущность процесса стабилизации частоты в предлагаемом методе не изменяется, а меняется только масштаб используемого коэффициента управления.
Проведенный сравнительный анализ выявил следующие отличия заявленного способа от способа-прототипа:
1. Способ характеризуется наличием дополнительных действий над материальным объектом:
- определением отклонений относительно своих номинальных значений частот выходных сигналов стабилизируемого и опорного генераторов в виде отклонений от номинальных значений чисел периодов колебаний или импульсов выходных сигналов, вырабатываемых опорным и стабилизируемым генераторами за один и тот же временной интервал измерений;
- определением отношений найденных на временном интервале измерений отклонений от номинальных значений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов.
2. Изменена совокупность действий над материальным объектом:
- в заявленном способе отсутствуют действия по выравниванию частот сигналов стабилизируемого и опорного генераторов;
- регистрация параметров выходных сигналов стабилизируемого и опорного генераторов в виде чисел импульсов или периодов колебаний проводится на одном и том же временном интервале измерений, задаваемом третьим генератором, что позволяет определить отклонения указанных параметров относительно своих номинальных значений как для опорного, так и стабилизируемого генераторов - в прототипе выполнение данной операции не имеет смысла;
- сигнал управления частотой стабилизируемого генератора определяется не разностью фаз сигналов стабилизируемого и опорного генераторов, а разностью между определяемым по результатам измерений отношением отклонений их частот в виде отношения отклонений относительно их номинальных значений чисел периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами в течение одного и того же временного интервала измерений, и значением эталонного коэффициента пропорциональности, зависящего от отношения номинальных значений частот стабилизируемого и опорного генераторов и долговременных относительных нестабильностей частот выходных сигналов задающего временной интервал измерений и опорного генераторов.
На чертеже представлен вариант схемы устройства, реализующего предлагаемый способ стабилизации частоты, где 1 - стабилизируемый генератор импульсов, 2 - опорный генератор импульсов, 3 - генератор импульсов, задающий временной интервал измерений (задающий генератор), 4 - устройство управления, 5, 6 - счетчики импульсов, 7 - формирователь начальных условий, 8-11 - арифметико-логические устройства, 12 - постоянное запоминающее устройство, 13 - цифроаналоговый преобразователь, 14 - преобразователь ток - напряжение.
Устройство, представленное на чертеже, работает следующим образом. Генератор 1 вырабатывает импульсную последовательность с частотой f1. Генератор 2 вырабатывает импульсы с частотой f2. Соотношение между частотами f1 и f2 таково, что f1>>f2. Генераторы 1 и 2 подобраны таким образом, что долговременные относительные нестабильности частот их выходных сигналов одинаковы: δ1 = δ2, где δ1 и δ2 - долговременные относительные нестабильности частот выходных сигналов первого и второго генераторов.
Генератор 3 является задающим (опорным) при формировании временного интервала измерений и вырабатывает сигналы задающей (опорной) частоты для устройства управления 4. Устройство управления 4 формирует команду начальной установки (СБРОС) и формирует сигналы разрешения счета (сигнал начала временного интервала измерений) и прекращения счета (сигнал конца временного интервала измерений) на разрешающие входы счетчиков 5 и 6. Сигнал конца временного интервала измерений формируется в устройстве управления 4 в соответствии с требуемой длительностью временного интервала измерений по заданному числу импульсов, поступивших в устройство управления 4 от задающего генератора 3. Таким образом, задающий генератор 3 и устройство управления 4 совместно формируют временной интервал измерений. В качестве задающего генератора 3 может быть использован один из генераторов, выпускаемых промышленностью, например один из высокочастотных кварцевых генераторов. Длительность временного интервала измерений определяется разрядностью и быстродействием цифровых элементов схемы, обеспечивающих подсчет чисел импульсов и обеспечивающих вычисление коэффициента управления частотой стабилизируемого генератора 1.
На счетные входы счетчиков 5 и 6 поступают импульсы от стабилизируемого генератора 1 и опорного генератора 2 соответственно. Счетчики 5 и 6 подсчитывают число импульсов, поступающих на их счетные входы в течение временного интервала измерений.
Со второго выхода устройства управления 4 на вход формирователя начальных условий 7 поступает цифровой код, соответствующий длительности временного интервала измерений. Формирователь начальных условий 7, исходя из номинальных значений частот f1, f2, и длительности временного интервала измерений вырабатывает числа импульсов, пропорциональные произведениям значений частот f1 и f2 соответственно на номинальное значение длительности временного интервала измерений ТИ.
С первого выхода формирователя начальных условий 7 сигнал, соответствующий количеству импульсов, которые выработал бы генератор 1 за абсолютно стабильный временной интервал измерений (т.е. при ТИ=Т0) при работе на номинальной частоте f1, и численно равный произведению f1•Т0, в двоичном коде поступает на первый вход арифметико-логического устройства 8, на второй вход которого поступает в двоичном коде сигнал с выхода счетчика 5, соответствующий числу импульсов, подсчитанных счетчиком 5 за реальный временной интервал измерений ТИ (т.е. при ТИ=Т0+Δt). В арифметико-логическом устройстве 8 вычисляется разность ΔN1 между числом, поступившим на его первый вход от формирователя начальных условий 7, и числом, поступившим на второй вход арифметико-логического устройства 8 от счетчика 5.
Со второго выхода формирователя начальных условий 7 сигнал, соответствующий количеству импульсов, которые выработал бы генератор 2 за абсолютно стабильный временной интервал измерений (т.е. при ТИ=Т0) при работе на номинальной частоте f2, и численно равный произведению f2•Т0, в двоичном коде поступает на первый вход арифметико-логического устройства 9, на второй вход которого поступает в двоичном коде сигнал с выхода счетчика 6, соответствующий числу импульсов, подсчитанных счетчиком 6 за реальный временной интервал измерений ТИ (т.е. при ТИ=Т0+Δt). В арифметико-логическом устройстве 9 вычисляется разность ΔN2 между числом, поступившим на его первый вход от формирователя начальных условий 7, и числом, поступившим на второй вход арифметико-логического устройства 9 от счетчика 6.
На первый вход арифметико-логического устройства 10 в двоичном коде поступает сигнал с выхода арифметико-логического устройства 9, сформированный в этом устройстве и численно соответствующий ΔN2 - отклонению относительно номинального значения числа импульсов, поступивших на вход счетчика 6 за реальный временной интервал измерений ТИ. С третьего выхода формирователя начальных условий 7 на второй вход арифметико-логического устройства 10 поступает сигнал, задающий коэффициент умножения числа, поступающего на первый вход арифметико-логического устройства 10. Коэффициент умножения, задаваемый в формирователе начальных условий 7 и поступающий в арифметико-логическое устройство 10, численно равен эталонному коэффициенту пропорциональности КЭТ, определяемому в соответствии с выражением (7). С выхода арифметико-логического устройства 10 на первый вход арифметико-логического устройства 11 в двоичном коде поступает сигнал, численно соответствующий значению ΔN2•КЭТ. С выхода арифметико-логического устройства 8 на второй вход арифметико-логического устройства 11 в двоичном коде поступает сигнал, численно соответствующий значению ΔN1. В арифметико-логическом устройстве 11 вычисляется коэффициент управления Купр, численно равный:
Kупр = ΔN1-ΔN2KЭT. (15)
С выхода арифметико-логического устройства 11 сигнал, соответствующий рассчитанному коэффициенту управления Купр, поступает на вход постоянного запоминающего устройства 12. В постоянном запоминающем устройстве 12 хранятся значения функции управления. При этом каждому значению сигнала, поступающего на его вход с выхода арифметико-логического устройства 11, ставится в соответствие конкретное численное значение функции управления. С выхода постоянного запоминающего устройства 12 сигнал в двоичном коде, соответствующий численному значению функции управления, поступает на вход цифроаналогового преобразователя 13. В цифроаналоговом преобразователе 13 осуществляется преобразование поступившего на его вход двоичного кода в соответствующий этому коду аналоговый токовый сигнал управления. С выхода цифроаналогового преобразователя 13 аналоговый токовый сигнал управления поступает на вход преобразователя ток - напряжение 14, с выхода которого сигнал управления в виде управляющего напряжения поступает на реактивный элемент частотозадающего контура генератора 1 для коррекции частоты генератора 1.
В результате работы устройства, структурная схема которого представлена на чертеже, осуществляется выравнивание средних скоростей  отклонений относительно их номинальных значений частот выходных сигналов f1 и f2 генераторов 1 и 2 соответственно, что, при выполнении условий f1>>f2 и δ1≃δ2, обеспечивает уменьшение относительной нестабильности частоты генератора 1, т. е. производится повышение стабильности частоты этого генератора.
отклонений относительно их номинальных значений частот выходных сигналов f1 и f2 генераторов 1 и 2 соответственно, что, при выполнении условий f1>>f2 и δ1≃δ2, обеспечивает уменьшение относительной нестабильности частоты генератора 1, т. е. производится повышение стабильности частоты этого генератора.
Проведенный патентный поиск показал, что предлагаемое изобретение в полной мере отвечает критерию новизны.
ЛИТЕРАТУРА
1. Шахгильдян В.В., Ляховкин А.А. Фазовая автоподстройка частоты. - М.: Связь, 1966. - 335 с.
2. Клэппер Дж. , Фрэнкл Дж. Системы фазовой и частотной автоподстройки частоты. (Следящие демодуляторы сигналов с угловой модуляцией). - М.: Энергия, 1977. - 440 с.
3. Системы фазовой синхронизации. / В.Н. Акимов, Л.Н. Белюстина, В.Н. Белых и др. Под ред. В.В. Шахгильдяна, Л.Н. Белюстиной. - М.: Радио и связь, 1982. - 288 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТ ГЕНЕРАТОРОВ | 2000 |
|
RU2219654C2 |
| СПОСОБ КОМПЕНСАЦИИ ИСКАЖЕНИЙ АМПЛИТУДНО-ФАЗОВОГО РАСПРЕДЕЛЕНИЯ ПОЛЯ В РАСКРЫВЕ АДАПТИВНОЙ АНТЕННОЙ РЕШЕТКИ, ОБУСЛОВЛЕННЫХ ВЛИЯНИЕМ КЛИМАТИЧЕСКИХ ФАКТОРОВ | 2010 |
|
RU2446521C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУППИРОВАНИЕМ НАБЛЮДЕНИЙ ПРИ ФИЛЬТРАЦИИ ЧАСТОТНО-МОДУЛИРОВАННЫХ СИГНАЛОВ | 2011 |
|
RU2453990C1 |
| ГРАВИМЕТР С ЖИДКИМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 1992 |
|
RU2069880C1 |
| Голографический способ формирования радиочастотных электрических колебаний на дискретных частотах | 2023 |
|
RU2813988C1 |
| Частотный способ измерения дальности с измерением частоты биений голографической измерительной системой | 2021 |
|
RU2765727C1 |
| Система стабилизации задержки | 1981 |
|
SU957422A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 2009 |
|
RU2395831C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКАНАЛЬНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМОЙ | 1994 |
|
RU2084955C1 |
| Голографический способ измерения доплеровского сдвига частоты | 2022 |
|
RU2793229C1 |
Изобретение относится к области стабилизации частот генераторного оборудования и может найти применение в аппаратуре связи, радиолокации, измерительной технике. Достигаемый технический результат - повышение стабильности частоты. В способе стабилизации частоты генератора измеряют числа периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами за один и тот же временной интервал измерений, определяют эталонный коэффициент пропорциональности, численно равный требуемому отношению отклонений от номинальных значений за временной интервал измерений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов, проверяют выполнение условия равенства упомянутого эталонного коэффициента пропорциональности и величины отношения найденных отклонений от их номинальных значений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов за временной интервал измерений, вырабатывают управляющий сигнал коррекции частоты стабилизируемого генератора. 1 ил.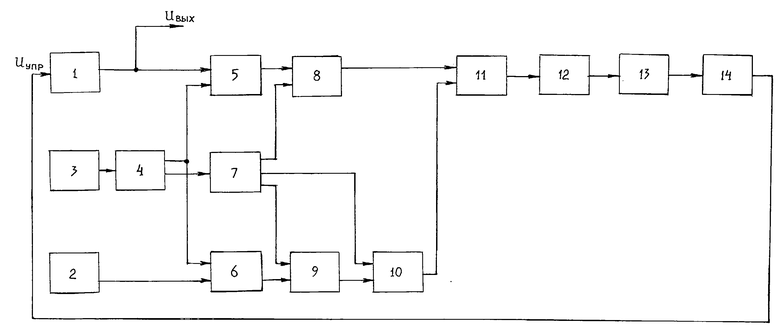
Способ стабилизации частоты генератора, заключающийся в том, что в качестве опорного используют генератор, имеющий меньшую среднюю скорость отклонения частоты его выходного сигнала относительно ее номинального значения по сравнению со средней скоростью отклонения частоты выходного сигнала относительно ее номинального значения стабилизируемого генератора, измеряют числа периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами соответственно за один и тот же временной интервал измерений, и на основании результатов измерений формируют управляющий сигнал для изменения частоты выходного сигнала стабилизируемого генератора, обеспечивающий уменьшение отклонений частоты выходного сигнала этого генератора от ее номинального значения, отличающийся тем, что задающим генератором формируют временной интервал измерений, в течение которого одновременно измеряют числа периодов колебаний или импульсов выходных сигналов, вырабатываемых стабилизируемым и опорным генераторами, определяют номинальные значения чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов, вырабатываемых ими за временной интервал измерений, находят отклонения измеренных от рассчитанных номинальных значений чисел периодов колебаний или импульсов выходных сигналов соответственно стабилизируемого и опорного генераторов за временной интервал измерений, определяют эталонный коэффициент пропорциональности, численно равный требуемому отношению отклонений от номинальных значений за временной интервал измерений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов, проверяют выполнение условия равенства эталонного коэффициента пропорциональности и величины отношения найденных отклонений от их номинальных значений чисел периодов колебаний или импульсов выходных сигналов стабилизируемого и опорного генераторов соответственно за временной интервал измерений, по результатам проверки выполнения этого условия вырабатывают управляющий сигнал для коррекции частоты стабилизируемого генератора, что и обеспечивает повышение стабильности этой частоты, при этом эталонный коэффициент пропорциональности определяют из выражения
где КЭТ - эталонный коэффициент пропорциональности;
f1 и f2 - номинальные значения частот выходных сигналов стабилизируемого и опорного генераторов соответственно;
δ0 - долговременная относительная нестабильность частоты выходного сигнала задающего генератора;
δ2 - долговременная относительная нестабильность частоты выходного сигнала опорного генератора.
| Цифровой синтезатор частоты | 1987 |
|
SU1515364A1 |
| Цифровой синтезатор частот | 1986 |
|
SU1483632A1 |
| SU 1198750 A, 15.12.1985 | |||
| Цифровое устройство частотной автоподстройки | 1983 |
|
SU1104659A1 |
| US 5625324 A, 29.04.1997 | |||
| US 6031428 A, 29.02.2000 | |||
| US 5572168 A, 05.11.1996. | |||

