Изобретение относится к геофизике, в частности к устройствам для измерения силы тяжести.
Известен кварцевый гравиметр, см. "Судовые средства измерения параметров гравитационного поля Земли". Обзор по судостроительной технике под редакцией Пешехонова В.Г.; "ЦНИИ "Румб", 1989, стр. 40, содержащий корпус, заполненный демпфирующей жидкостью, в верхнем основании которого установлено защитное стекло, двойную кварцевую упругую систему крутильного типа, включающую два горизонтальных маятника с укрепленными на них зеркалами, фотоэлектрический преобразователь автоколлимационного типа для измерения угла поворота маятников.
Недостатком известного устройства является достижение заданной точности в ограниченном измерительном диапазоне и наличие погрешности, связанной с изменением масштаба преобразования угла поворота зеркала маятника во временной интервал.
Наиболее близким по технической сущности и принятым за прототип является кварцевый гравиметр по Патенту РФ 2171481 от 03.02.2000 г., опубликованный 27.07.2001 г., содержащий корпус, заполненный демпфирующей жидкостью, внутри которого установлена двойная кварцевая упругая система крутильного типа с горизонтальными маятниками, к которым приварены плоские зеркала, развернутые в противоположные стороны на некоторый угол. В верхней части корпуса установлено защитное стекло, на котором размещены два компенсатора, каждый из которых состоит из пары оптических клиньев, образующих в исходном положении плоскопараллельную пластину. Над корпусом упругой системы расположен фотоэлектрический преобразователь, включающий в себя источник излучения, щелевую диафрагму, автоколлимационную оптическую систему и фотоэлектрический приемник излучения, представляющий собой ПЗС-матрицу.
Гравиметр по патенту РФ 2171481 обеспечивает выполнение морской гравиметрической съемки со средней квадратической погрешностью 0.3-0.4 мГал во всей акватории Мирового океана. Принципиально этот гравиметр может быть использован и для аэрогравиметрической съемки. Однако малый размер ПЗС-матрицы лимитирует динамический диапазон измерений, который при съемке с летательных аппаратов должен быть существенно больше для достижения разрешения в 2-3 км. Кроме того, в этом гравиметре недостаточна частота выработки гравиметрических данных и отсутствует возможность точной привязки съема данных ко времени получения навигационной информации по данным приемника спутниковой навигационной системы GPS, что приводит к методической погрешности измерений.
Задачей, на решение которой направлено изобретение, является повышение динамического диапазона и инструментальной точности измерений с одновременным увеличением частоты съема гравиметрических данных и их привязки ко времени получения навигационной информации.
Указанная задача достигается тем, что в кварцевом гравиметре, содержащем корпус, заполненный демпфирующей жидкостью, двойную кварцевую упругую систему крутильного типа с горизонтальными маятниками и укрепленными на них зеркалами и фотоэлектрический преобразователь, включающий в себя источник излучения, объектив, автоколлимационную марку, установленную в фокальной плоскости объектива, и фотоэлектрический приемник, установленный в сопряженной фокальной плоскости, фотоэлектрический приемник выполнен в виде двух приборов с зарядовой связью (ПЗС) линейного типа, развернутых друг относительно друга на 180o и разнесенных на расстояние, соответствующее углу разворота зеркал маятников в направлении, перпендикулярном сканированию, а источник излучения с автоколлимационной маркой размещен на оптической оси объектива между ПЗС, управляющие входы которых подключены к единому формирователю управляющих сигналов, а выходные регистры через видеотракт подключены к аналого-цифровым преобразователям, соединенным с блоками вычислений, выходы которых через устройство интерфейса и оптронную развязку подключены к передатчику последовательного канала, при этом измерение силы тяжести, основанное на измерении угла поворота маятников, осуществляется в импульсном режиме по приходу синхроимпульса от внешнего источника.
Основное преимущество предлагаемого изобретения обусловлено применением ПЗС линейного типа, которые имеют большую длину светочувствительной области и значительно большее число элементов разложения по отношению к матричным приемникам, что позволяет расширить динамический диапазон измерений даже при увеличении фокусного расстояния объектива. Последний фактор позволяет при одинаковой погрешности измерения линейного перемещения ПЗС-приемником снизить инструментальную погрешность измерения силы тяжести пропорционально увеличению фокусного расстояния.
Кроме того, глубина потенциальной ямы элемента разложения ПЗС линейного типа в десятки раз превышает глубину потенциальной ямы элемента матричного ПЗС за счет увеличения ширины элемента разложения, вследствие чего накопительная способность и величина отношения сигнал/шум фотоэлектрического преобразователя в несколько раз превышает соответствующие характеристики прототипа.
Разворот корпусов ПЗС относительно друг друга на 180o обеспечивает исключение тепловых флуктуаций полезного сигнала каждого ПЗС в суммарном значении, а применение многощелевой диафрагмы позволяет выполнять пространственное осреднение сигнала.
Существенным преимуществом является возможность синхронизации работы формирователя управляющих сигналов от приемника навигационной информации спутниковой навигационной системы.
Исходя из изложенного, заявленная совокупность признаков позволяет получить необходимые и достаточные совокупности элементов и параметров схемы кварцевого гравиметра, позволяющих повысить динамический диапазон и инструментальную точность измерений с одновременным увеличением частоты съема гравиметрических данных и их привязки ко времени получения к навигационной информации.
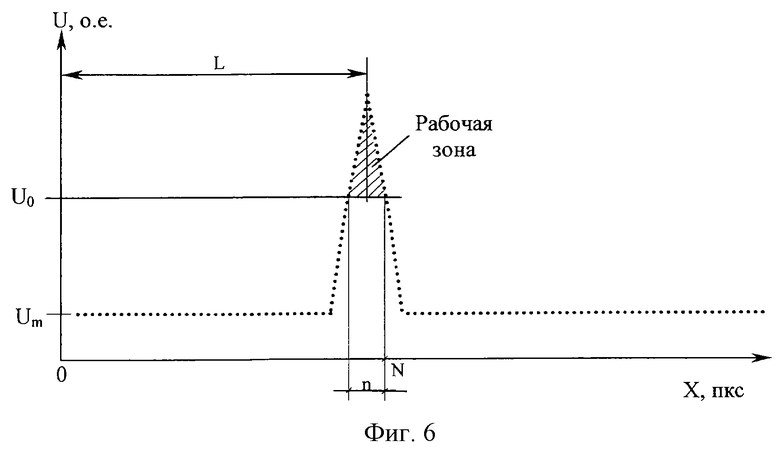
Сущность изобретения поясняется чертежами, где на фиг.1 изображен общий вид устройства в плоскости основного сечения, на фиг.2 - сечение А-А, на фиг. 3 - сечение Б-Б, на фиг.4 -функциональная схема работы фотоэлектрического преобразователя, на фиг.5 - временные диаграммы его работы, а на фиг.6 - вид сигнала ПЗС.
Устройство для измерения силы тяжести содержит корпус 1, заполненный демпфирующей жидкостью 2. Внутри корпуса установлена двойная кварцевая упругая система 3 крутильного типа с горизонтальными маятниками 4, к которым приварены зеркала 5. В верхней части корпуса установлено защитное стекло 6, на котором размещены два компенсатора 7, каждый из которых состоит из пары оптических клиньев, образующих в исходном положении плоскопараллельную пластину. Над корпусом упругой системы расположен фотоэлектрический преобразователь, включающий в себя источник излучения 8, автоколлимационную марку 9, установленную в фокальной плоскости объектива 10 и двух приемников излучения 11, роль которых выполняют приборы с зарядовой связью (ПЗС) линейного типа, размещенные в сопряженной фокальной плоскости объектива 10. Автоколлимационная марка может быть выполнена как в виде одной щели, так и многощелевой диафрагмы. Конструктивно ПЗС разнесены на некоторое расстояние d, соответствующее углу поворота зеркал маятников в направлении, перпендикулярном сканированию. Приемные площадки ПЗС направлены вдоль перемещения автоколлимационного изображения марки, а их корпуса развернуты друг относительно друга на 180o. Источник излучения с автоколлимационной маркой размещен на оптической оси объектива между ПЗС. В качестве источника излучения используется излучательный светодиод.
В соответствии с функциональной схемой (фиг.4) управляющие входы обоих ПЗС подключены к единому формирователю управляющих сигналов, соединенному через оптронную развязку с приемником внешних синхроимпульсов. Формирователь также соединен с синтезатором частот, который подключен к генератору образцовой частоты F0. Выходные регистры каждого из ПЗС через видеотракт подключены к соответствующим аналого-цифровым преобразователям, которые соединены с блоками вычислений. Выходы блоков вычислений через устройство интерфейса и оптронную развязку подключены к передатчику последовательного канала. Формирователь управляющих сигналов, синтезатор частот, блоки вычислений и устройство интерфейса могут быть выполнены на программируемой логической интегральной схеме, соединенной с энергонезависимой памятью.
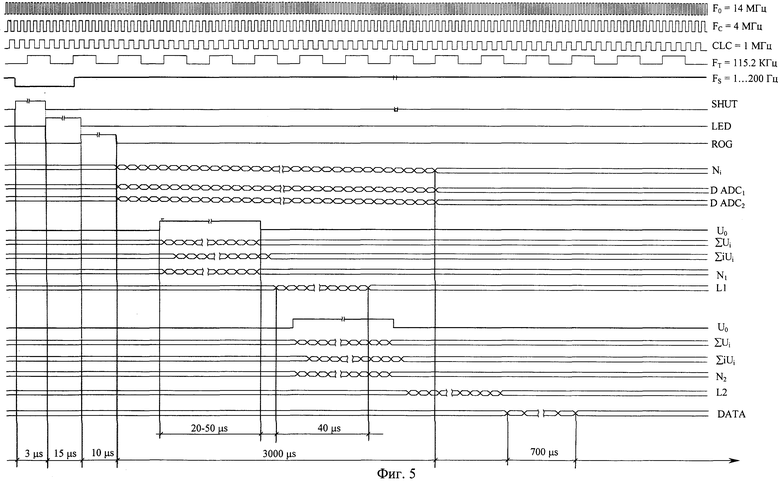
Устройство для измерения силы тяжести работает следующим образом (фиг. 5): с приходом синхроимпульса Fs от внешнего источника формирователь управляющих сигналов генерирует сигнал SHUT, по которому производится обнуление светочувствительной области и считывающих регистров ПЗС. Затем формирователь вырабатывает сигнал LED, управляющий длительностью импульса излучения светодиода.
Как показано на фиг. 1-3, поток световых лучей от источника излучения, освещающего автоколлимационную марку, проходит через объектив, отражается от зеркал маятников, делящих его на две части, снова попадает в объектив и направляется на ПЗС, в плоскости которых формируются автоколлимационные изображения марки Р1 и Р2. Совмещение каждого из изображений со светочувствительной областью ПЗС обеспечивается посредством поворота клиньев компенсатора вокруг оси, параллельной оптической оси объектива.
Изменение ΔL1 положения автоколлимационного изображения Р1, сформированного от зеркала первого маятника, пропорционально изменению угла закручивания Δϕ1 кварцевой нити в соответствии с формулой
ΔL1 = 2•n•f•Δϕ1,
где n - коэффициент преломления демпфирующей жидкости;
f - фокусное расстояние объектива.
Изменение положения ΔL2 автоколлимационного изображения Р2, сформированного от зеркала второго маятника, пропорционально изменению угла закручивания Δϕ2 кварцевой нити в соответствии с формулой
ΔL2 = 2•n•f•Δϕ2.
Величина угла Δϕ пропорциональна изменению силы тяжести Δg
Δϕ = ν•Δg,,
где ν - коэффициент, определяемый силой упругости кварцевой нити. Отсюда:
ΔL = 2•n•f•ν•Δg.
Измерение положений L1 и L2 изображений автоколлимационной марки производится следующим образом: по окончанию засветки ПЗС, формирователь управляющих сигналов вырабатывает сигнал ROG, по которому объемные заряды, накопленные в элементах ПЗС, переносятся в считывающие регистры. Затем по сигналу CLC, вырабатываемому формирователем, объемные заряды последовательно поступают на вход аналого-цифрового преобразователя, который формирует 12-битный код.
Цифровой код поступает на вход блока вычислений, который производит расчет положения центра автоколлимационной марки.
По окончанию расчета величин L1 и L2 по последовательному интерфейсу передаются в компьютер, в котором производится фильтрация возмущающих ускорений и вычисляется итоговая оценка приращения силы тяжести по формуле
где k - масштабный коэффициент, [мГал/пкс].
Примером конкретной реализации является изготовленный опытный образец кварцевого гравиметра, фотоэлектрический преобразователь которого построен на объективе с фокусным расстоянием f= 150 мм и двух ПЗС линейного типа ILX526A фирмы Sony. Количество элементов ПЗС - 3000, размер элемента 7х200 мкм, длина светочувствительной области 21 мм. В качестве источника излучения использован светодиод с максимумом спектральной яркости на длине волны λ=626 мкм, работающий в импульсном режиме с частотой 50 Гц. Автоколлимационная марка выполнена в виде щели размером 0,05х1 мм. Вычислительная часть преобразователя изготовлена в виде печатной платы диаметром 112 мм, на которой кроме двух ПЗС установлены два АЦП AD9225, ПЛИС EPF10K40RC208-4 и энергонезависимая память EPC2LI20. Выдача информации в компьютер осуществляется по последовательному интерфейсу RS-232 с частотой 50 Гц.
Относительная погрешность измерения составила менее 3•10-6, что при диапазоне измерений 18 Гал соответствует 0.05 мГал.
Техническими преимуществами предлагаемого изобретения по сравнению с прототипом являются:
- увеличение динамического диапазона измерений в 2 раза;
- увеличение инструментальной точности в 2 раза;
- увеличение чувствительности в 10 раз;
- увеличение частоты выдачи данных в 10 раз;
- привязка съема гравиметрических данных ко времени получения навигационной информации не хуже 1 мс.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ СИЛЫ ТЯЖЕСТИ | 2008 |
|
RU2377611C1 |
| КВАРЦЕВЫЙ ГРАВИМЕТР | 2000 |
|
RU2171481C1 |
| Гиростабилизированный кварцевый гравиметр и способ его калибровки | 2015 |
|
RU2619132C1 |
| Кварцевый гравиметр | 1980 |
|
SU953609A1 |
| ДВУХКООРДИНАТНЫЙ ФОТОЭЛЕКТРИЧЕСКИЙ ЦИФРОВОЙ АВТОКОЛЛИМАТОР | 2013 |
|
RU2535526C1 |
| АВТОКОЛЛИМАТОР ДЛЯ ИЗМЕРЕНИЯ ПЛОСКИХ УГЛОВ | 2007 |
|
RU2353960C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ ИЗОБРАЖЕНИЯ МАРКИ В ЦИФРОВЫХ АВТОКОЛЛИМАТОРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2773278C1 |
| КВАРЦЕВЫЙ КРУТИЛЬНЫЙ ГРАВИМЕТР МАЯТНИКОВОГО ТИПА | 1950 |
|
SU101316A1 |
| Фотоэлектрическое автоколлимационное устройство | 1990 |
|
SU1737264A1 |
| Устройство компенсации погрешностей обработки на металлорежущих станках | 1986 |
|
SU1706836A1 |
Использование: для определения ускорения силы тяжести. Сущность: измерение силы тяжести, основанное на измерении угла поворота маятников двойной упругой системы крутильного типа автоколлимационным способом, осуществляется в импульсном режиме в следующей последовательности: с приходом синхроимпульса от внешнего источника производится обнуление светочувствительной области и считывающих резисторов ПЗС, затем производится кратковременная засветка ПЗС, после чего объемные заряды, накопленные в элементах ПЗС, переносятся в считывающие регистры, выходное напряжение которых преобразуется в цифровой код, используемый для расчета положения изображения автоколлимационной марки, передаваемого затем в компьютер по последовательному интерфейсу. Технический результат: повышение точности динамического диапазона и инструментальной точности с одновременным увеличением частоты съема гравиметрических данных. 2 с. и 3 з.п. ф-лы, 6 ил.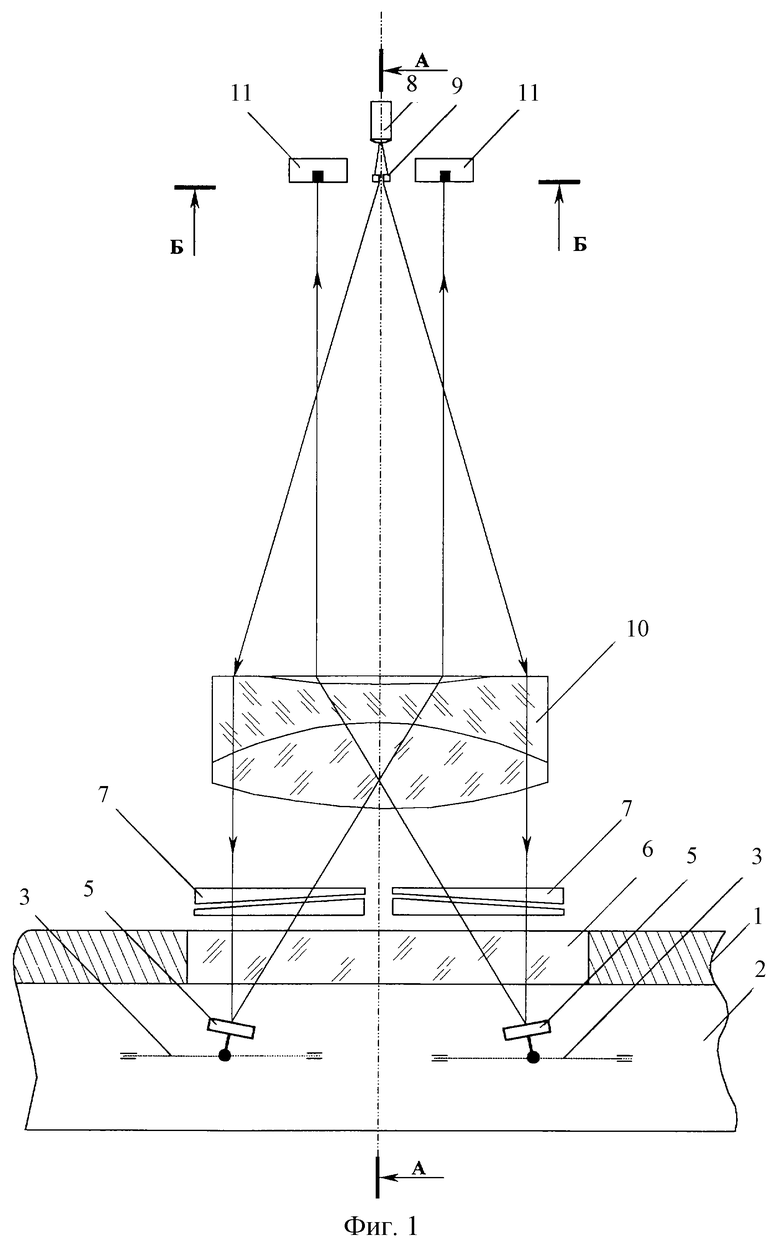
| КВАРЦЕВЫЙ ГРАВИМЕТР | 2000 |
|
RU2171481C1 |
| Оправка для гибки труб | 1981 |
|
SU963609A1 |
| Гравиметр | 1979 |
|
SU1099302A1 |
| ГРАВИМЕТР | 0 |
|
SU384088A1 |
| СЕЯЛКА | 1995 |
|
RU2089057C1 |
| US 3554034 А, 12.01.1971 | |||
| JP 61079182 А, 22.04.1986. | |||

