Изобретение относится к устройству для непрерывной загрузки емкостей, в частности пластиковых бутылок.
Такие устройства используются согласно WO 98/40531, например, для загрузки пластиковых бутылок, таких как полиэтиленовые бутылки, в камеру обработки, где на них с целью улучшения барьерных свойств наносят покрытие. Для того чтобы каждая емкость во время загрузки, при прохождении в шлюзовом роторе и при выгрузке не находилась в свободном положении, а оставалась всегда точно позиционированной (также для защиты поверхности емкости), а также по причинам надежности процесса используются взаимодействующие между собой зажимы. Надежность процесса является крайне важным фактором, поскольку сбой за счет неправильно позиционированной или находящейся в свободном положении бутылки требует остановки устройства, уменьшения разрежения и отключения устройств в камере обработки, обуславливает более длительное время простоя и в результате этого высокие издержки. При необходимости приходится также удалять из камеры обработки все емкости, прежде чем можно будет снова запустить устройство в процесс обработки. Хотя, собственно говоря, благодаря зажимам надежность процесса уже относительно высока, нельзя исключать того, что именно у шлюзового ротора, например, с более чем двадцатью шлюзовыми камерами при неблагоприятных обстоятельствах передача емкости с одной звездочки на шлюзовой ротор или со шлюзового ротора к звездочке не удастся и емкость останется в шлюзовой камере, которая должна быть пустой для загрузки новой емкости. Тогда неизбежно произойдет сбой рабочего процесса.
Из US-А-1766018 известно устройство для непрерывной загрузки емкостей, в частности, пластиковых бутылок, в камеру обработки и/или выгрузки из нее, содержащее, по меньшей мере, один приводимый во вращение шлюзовой ротор с открытыми наружу на наружной поверхности шлюзовыми камерами, по меньшей мере, одну установленную на наружной поверхности шлюзового ротора, с возможностью вращения вместе с ним пару звездочек, расположенных на расстоянии друг от друга в направлении периферии шлюзового ротора, а также расположенные в шлюзовых камерах и на звездочках расположенные с возможностью взаимодействия между собой захватно-удерживающие механизмы для емкостей. Также известно, что у пары шлюзовых роторов всего с шестью шлюзовыми камерами каждый, для укупориваемых в вакууме емкостей в каждом шлюзовом роторе предусмотрены диаметрально противоположные толкатели. Каждый толкатель входит своими концами в две диаметрально противоположные друг другу шлюзовые камеры и приводится в действие (вакуумом, поступающей емкостью или приводом) так, что выталкивает выдаваемую емкость из шлюзовой камеры. Если при неблагоприятных обстоятельствах выталкиваемая емкость остается в своей шлюзовой камере, то возникает чрезвычайно трудно устраняемый сбой с повреждениями, поскольку отсутствует возможность удаления непредусмотренным образом застрявшей емкости.
В основе изобретения лежит задача создания устройства описанного выше рода, у которого с высокой степенью надежности исключены сбои в работе из-за непредусмотено застрявших емкостей.
Поставленная задача решается посредством устройства для непрерывной загрузки емкостей, в частности пластиковых бутылок, в камеру обработки и/или выгрузки из нее, содержащее по меньшей мере один приводимый во вращение шлюзовой ротор с открытыми наружу на наружной поверхности шлюзовыми камерами, по меньшей мере, одну установленную на наружной поверхности шлюзового ротора с возможностью вращения вместе с ним пару звездочек, расположенных на расстоянии друг от друга в направлении периферии шлюзового ротора, а также расположенные в шлюзовых камерах и на звездочках расположенные с возможностью взаимодействия между собой захватно-удерживающие механизмы для емкостей, причем на наружной поверхности шлюзового ротора между звездочками, по меньшей мере, одной пары предусмотрены зона выталкивания емкостей и для каждой зоны выталкивания, по меньшей мере, один выталкивающий элемент, установленный с возможностью перемещения из исходного положения в шлюзовую камеру в положение выбрасывания емкостей.
Суть изобретения состоит в том, что, несмотря на "надежную" принудительную передачу и непрерывное позиционирование емкостей захватно-удерживающими механизмами, в устройство встроен дополнительный механизм, который в теоретически, правда, невероятном практически, однако не исключаемом случае непредусмотренным образом застрявшей в шлюзовой камере емкости удаляет ее из шлюзовой камеры, а именно во взаимодействии с предусмотренной зоной выталкивания, так что из шлюзового ротора каждая емкость не только удаляется, но и устраняется так, что не может больше вызвать сбой в работе. Многократная защита при транспортировке емкостей значительно повышает во взаимодействии с внутренними и внешними зонами выталкивания надежность процесса, причем это достигается с конструктивно-приемлемыми затратами.
В принципе при этом целесообразны два варианта. Выталкивающий элемент установлен либо вне шлюзового ротора и у зоны выталкивания и входит снаружи в шлюзовую камеру, либо выталкивающий элемент размещен внутри шлюзового ротора и входит в шлюзовую камеру изнутри в положение выбрасывания. В первом случае в каждой зоне выталкивания требуется только, по меньшей мере, один выталкивающий элемент. Во втором случае на каждую шлюзовую камеру требуется по меньшей мере один выталкивающий элемент.
Целесообразно выталкивающий элемент с механизмом перемещения располагать в зоне выталкивания, отдельно от пары звездочек и шлюзового ротора таким образом, что с этими элементами устройства не может произойти столкновений.
В качестве альтернативы в шлюзовом роторе каждая шлюзовая камера имеет один установленный с возможностью вращения в шлюзовом роторе выталкивающий элемент. Для приведения в действие выталкивающих элементов целесообразны два варианта. Если каждому выталкивающему элементу придан собственный, вращающийся вместе со шлюзовым ротором механизм перемещения, то конструктивные затраты, правда, выше, однако затраты на технику управления при необходимости ниже. В другом случае каждой зоне выталкивания придан только один, общий для всех выталкивающих элементов механизм перемещения. При этом конструктивные затраты низкие.
В конструктивно простой, функционально надежной и экономящей место форме выполнения используются приданные шлюзовым камерам выталкивающие элементы, удерживаемые в исходном положении посредством усилия пружины и перемещаемые затем в положение выбрасывания при попадании в зону выталкивания.
Целесообразно каждый толкатель устанавливать с возможностью линейного перемещения по направляющей в шлюзовом роторе, причем направляющая должна быть выполнена герметичной в отношении более высокого или более низкого давления в качестве атмосферного давления в камере обработки.
При простой форме выполнения каждый механизм перемещения имеет неподвижно установленную криволинейную направляющую, которая ориентирована по соответствующей зоне выталкивания и на которую последовательно набегают толкатели, перемещаемые в положения выбрасывания. Возврат толкателей происходит под действием усилия пружины. Для уменьшения износа толкатели могут быть снабжены роликами, шариками или подушками скольжения.
Особенно целесообразная форма выполнения содержит механизм перемещения, взаимодействующий с датчиком, который в случае непредусмотренно застрявшей емкости активизирует механизм перемещения, транспортирующий емкость посредством толкателя в зону выталкивания. Механизм перемещения имеет криволинейную направляющую, установленную с возможностью перемещения из пассивного положения в положение контакта на свободном конце толкателя. Для этого используют исполнительное устройство, целесообразно пневмоцилиндр, управляемый электромагнитным клапаном и перемещающий толкатель в положение выбрасывания либо непосредственно, либо предпочтительно через подвижную криволинейную направляющую.
Поскольку шлюзовой ротор вращается со значительной скоростью, целесообразно разместить датчик вне шлюзового ротора, преимущественно в направлении вращения ротора перед угловым положением криволинейной направляющей, в или у зоны выталкивания с возможностью контроля каждой шлюзовой камеры на наличие в ней емкости. Для того чтобы не пришлось модифицировать конструкцию шлюзового ротора, целесообразно разместить механизм перемещения на неподвижном основании.
Целесообразным является то, что датчик установлен вне шлюзового ротора на забирающей с него емкости звездочке с возможностью контроля каждого захватно-удерживающего механизма звездочки на отсутствие в нем емкости.
Предпочтительным является то, что выталкивающий элемент выполнен в виде установленного с возможностью вращения в шлюзовом роторе вместе с ним и качания рычага, преимущественно коленчатого рычага с расположенной в шлюзовой камере выталкивающей плитой, ориентированного исполнительным концом по неподвижно установленным криволинейным направляющим или поверхностям кулачков, которые, в свою очередь, ориентированы внутри шлюзового ротора по зонам выталкивания.
При простом альтернативном варианте выталкивающий элемент представляет собой вращающийся вместе со шлюзовым ротором, установленный с возможностью поворота рычаг, перемещаемый в положение выбрасывания посредством неподвижных криволинейных направляющих или поверхностей кулачков.
Для того чтобы не предусмотрено застрявшая и выброшенная с целью защиты от повреждений емкость не могла вызвать последующие повреждения, в соответствующей зоне выталкивания целесообразно предусмотрен сборник для емкостей или выбраковщик.
Целесообразно каждый выталкивающий элемент располагать под захватно-удерживающими механизмами, а именно в таком положении по высоте, при котором обеспечено быстрое и надежное выбрасывание.
Целесообразным является то, что протяженность каждой зоны выталкивания в направлении периферии шлюзового ротора многократно превышает ширину шлюзовой камеры.
Предпочтительным является то, что в камере обработки создан вакуум и в ней расположена зона выталкивания емкостей, причем вытолкнутые емкости, по меньшей мере, временно остаются в вакуумной камере обработки.
Для того чтобы при быстровращающемся шлюзовом роторе иметь достаточно времени для выбрасывания непредусмотренно застрявшей емкости, предпочтительно установить звездочки соответствующей пары в направлении периферии шлюзового ротора дальше друг от друга, чем это обычно принято.
Формы выполнения изобретения поясняются с помощью чертежа, на котором изображают:
- фиг. 1: вид сверху, частично в разрезе, на устройство для непрерывной загрузки емкостей в камеру обработки и их выгрузки из нее;
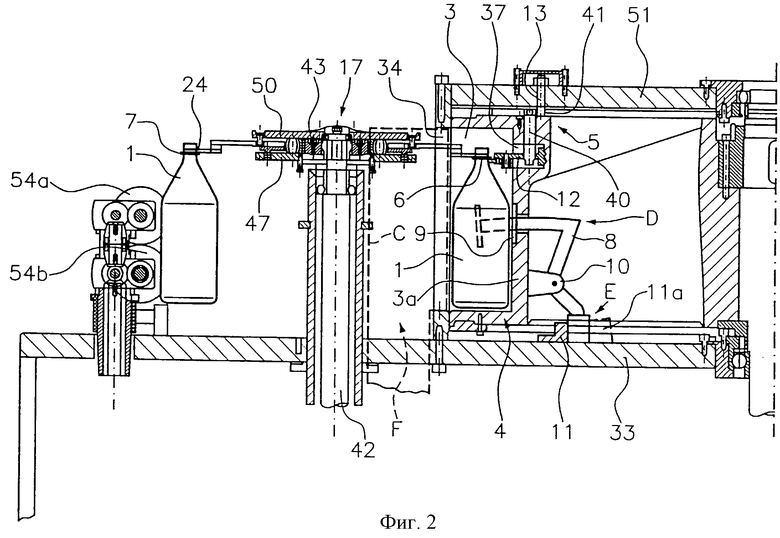
- фиг. 2: разрез видоизмененной формы выполнения в плоскости А-В по фиг. 1;
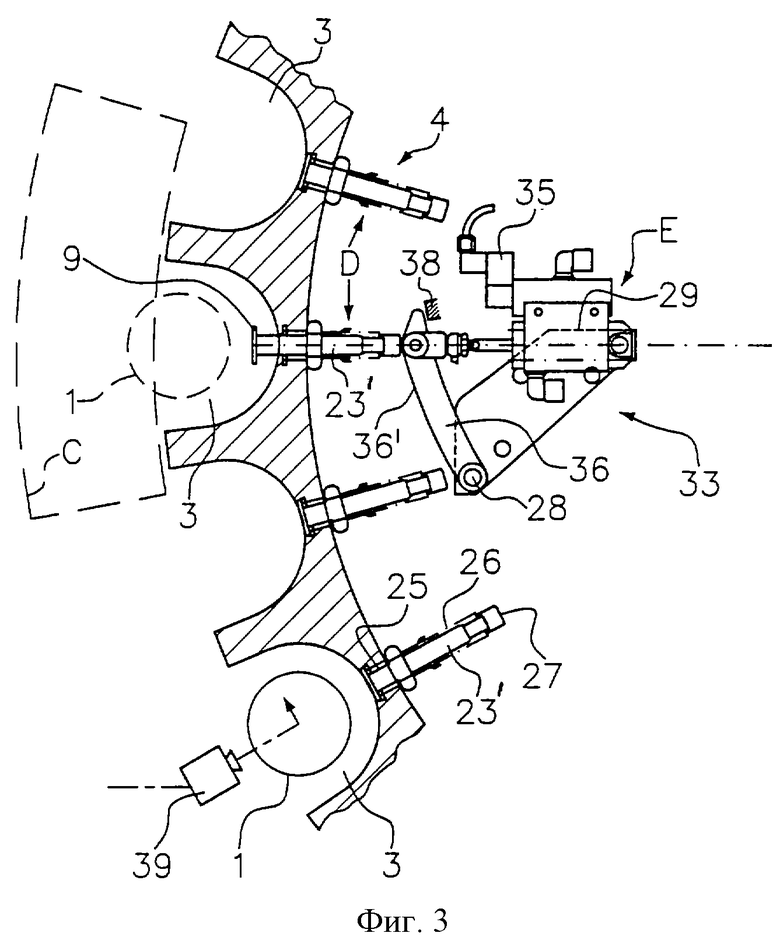
- фиг. 3: горизонтальный разрез шлюзового ротора в другой видоизмененной форме выполнения;
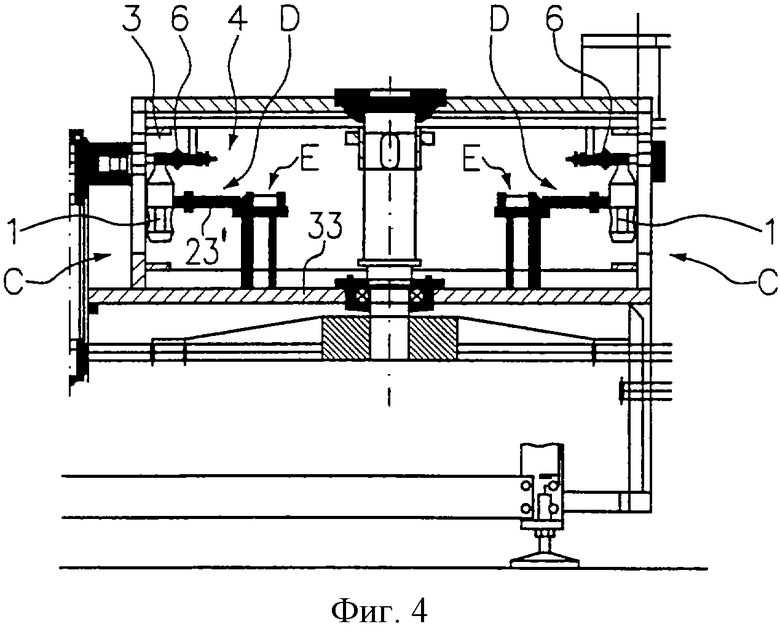
- фиг. 4: схематичный вертикальный разрез шлюзового ротора в выполнении по фиг. 3.
Устройство V на фиг. 1 и 2 служит для загрузки емкостей 1, например пластиковых бутылок, таких как полиэтиленовые бутылки многоразового использования, например, в вакуумную камеру 2 обработки и выгрузки из нее, в которой на емкости 1 наносят покрытие, например, для улучшения их барьерных свойств. В закрытой стенками 31 камере 2 обработки содержится транспортер 23 с вводимыми в отверстия емкостей 1 стержнями 32, который движет емкости через устройства для нанесения покрытия (не показаны).
Устройство V содержит (фиг. 2) горизонтальное основание 33, на котором установлены шлюзовой ротор 4 и две пары взаимодействующих со шлюзовым ротором 4 звездочек 17, 20; 18, 19 (по отношению к камере 2 обработки внутренние и внешние пары звездочек).
Внешняя звездочка 17 забирает емкости с подающего транспортера 21, в концевой зоне которого предусмотрены входные шнеки 54а, 54b. В этой концевой зоне на емкостях 1 защелкиваются зажимообразные захватно-удерживающие механизмы 24 звездочки 17. Затем каждую емкость 1 помещают в шлюзовой ротор 4 и передают в нем к управляемому захватообразному захватно-удерживающему механизму 6. Шлюзовой ротор 4 снабжен расположенными на его наружной поверхности открытыми наружу шлюзовыми камерами 3, каждая из которых содержит захватно-удерживающий механизм 6. Емкости 1 имеют, например, поясок 7 на горлышке (фиг. 2), а выше - резьбу. Зажимообразные захватно-удерживающие механизмы 24 захватывают емкости 1 над пояском 7, тогда как захватообразные захватно-удерживающие механизмы 6 в шлюзовых камерах 3 захватывают емкости 1 под пояском 7. Это обеспечивает без проблем передачу емкостей.
Звездочки 17, 18, 19, 20 выполнены в основном конструктивно одинаковыми и оснащены каждая зажимообразным захватно-удерживающими механизмами 24.
Зажимообразные захватно-удерживающие механизмы 24 звездочки 18 (внутренней звездочки), расположенной в камере 2 обработки, забирают емкости у захватообразных захватно-удерживающих механизмов 6 в шлюзовых камерах 3 и передают емкости к стержням 32 транспортера 23. Другая расположенная в камере 2 обработки звездочка 19 (также внутренняя звездочка) снимает обработанные емкости 1 со стержней 32 и передает их к захватообразным захватно-удерживающим механизмам 6 в шлюзовых камерах 3, которые транспортируют емкости 1 к внешней звездочке 20 и передают к ее зажимообразным захватно-удерживающим механизмам 24.
Посредством установленных под основанием 33 приводных органов (не показаны) шлюзовой ротор 4 и звездочки 17-20 приводятся во вращение по стрелке синхронно друг с другом, а также синхронно с транспортером 23. Газоплотно закрытые шлюзовые камеры 3 имеют такие размеры, которые незначительно больше наибольшей транспортируемой емкости 1. Шлюзовые стенки 34 переходят в стенки 31 камеры 2 обработки. На верхней стороне предусмотрена крышка 51. Шлюзовые камеры 3 могут быть соединены в зоне шлюзовых стенок 34 с трубопроводами для газоподвода и/или газоотвода.
С помощью захватообразного захватно-удерживающего механизма 6 в каждой шлюзовой камере 3 емкость 1 во время транспортировки в шлюзовом роторе 4 центрируют и фиксируют, а именно целесообразно в подвешенном положении без поддержки донышка и без контакта со стенками за шлюзовых камер. Каждый захватно-удерживающий механизм 6 установлен на опорной плите 12, закрепленной разъемно и газоплотно в выемке 37 шлюзовой камеры. В положении удержания захватно-удерживающий механизм 6 охватывает горлышко емкости более чем на 180o и с силовым замыканием, так что емкость 1 удерживается с силовым и геометрическим замыканием. Управление движениями раскрытия и смыкания захватно-удерживающих механизмов 6 происходит в нужных местах траектории вращения шлюзового ротора 4 с помощью управляющего устройства, которое, например, воздействует на предусмотренные в захватно-удерживающих механизмах 6 управляющие кулачки 10. Каждый управляющий кулачок 10 закреплен на управляющем валу 40, который установлен с возможностью вращения параллельно оси шлюзового ротора и выступает вверх. На выступающем конце закреплен управляющий рычаг 41, взаимодействующий каждый раз с одним из четырех неподвижных пальцеобразных упоров 13, 14, 15, 16, которые закреплены в крышке 51 и направлены к траектории вращения управляющих рычагов 41.
Поскольку звездочки 17-20 в основном конструктивно выполнены одинаковыми, поясняется только звездочка 17. На вертикальном приводном валу 42 закреплена горизонтальная плита 43, на которой с возможностью поворота установлены коленчатые рычаги, взаимодействующие через контактные ролики с неподвижно расположенным под плитой 43 кулачковым пазом 47, который управляет поворотным движением зажимообразных захватно-удерживающих механизмов 24 при вращении плиты 43. Расположенные на коленчатых рычагах движки взаимодействуют через контактные ролики со вторым кулачковым пазом 50, который неподвижно расположен над плитой 43 и управляет радиальным движением захватно-удерживающих механизмов 24. Захватно-удерживающие механизмы 24 охватывают емкость 1 более чем на 180o, так что при транспортировке емкостей 1 не требуется поддержка донышек. Во время принудительного управления захватообразными захватно-удерживающими механизмами 6 посредством их управляющего устройства 5 каждый зажимообразный захватно-удерживающий механизм 24 сам раскрывается емкостью 1 за счет того, что емкость разжимает захватно-удерживающий механизм 24, проникает в него, а затем удерживается за счет силового замыкания. Лишь после захвата емкости 1 захватообразным захватно-удерживающим механизмом 6 в шлюзовой камере 3 выдача емкости 1 происходит с заметным сопротивлением. При передаче емкости 1 от захватно-удерживающего механизма 6 к захватно-удерживающему механизму 2 4 звездочки 18 происходит управляемое раскрытие захватно-удерживающего механизма 6, как только емкость 1 надлежащим образом защелкнется в захватно-удерживающем механизме 24. Захватно-удерживающий механизм 24 звездочки 19 снимает емкость 1 со стержня 32, как только емкость 1 надлежащим образом защелкнется, и передает эту емкость позднее к захватно-удерживающему механизму 6, как только пpoизoйдeт его управляемое смыкание. Для передачи емкости к захватно-удерживающему механизму 24 звездочки 20 происходит управляемое раскрытие захватно-удерживающего механизма 6, как только емкость 1 надлежащим образом защелкнется в захватно-удерживающем механизме 24. Отводящий транспортер 22 извлекает наконец емкость 1 из захватно-удерживающего механизма 24 звездочки 20.
На фиг. 1 между каждой внешней 17, 20 и каждой внутренней 18, 19 парами звездочек предусмотрена зона С выталкивания емкостей, причем целесообразно обе звездочки каждой пары расположены в направлении периферии шлюзового ротора 4 дальше друг от друга, чем обычно, с тем, чтобы можно было непредусмотренно застрявшую в шлюзовой камере 3 емкость 1 вытолкнуть для защиты от повреждений и отвести ее. Для выталкивания такой емкости предусмотрен находящийся во взаимодействии с механизмом Е перемещения выталкивающий элемент D, установленный с возможностью перемещения из исходного положения, в котором он не входит в шлюзовые камеры 3, в положение выбрасывания в шлюзовую камеру 3.
На фиг. 1 выталкивающий элемент D обозначен схематично двойной стрелкой, как и механизм Е перемещения.
Существует несколько возможностей эффективно интегрировать в устройство V активизированные только в зонах С выталкивания выталкивающие элементы D с их механизмами Е перемещения.
В первом случае (не показан) выталкивающий элемент D находится со своим механизмом Е перемещения вне шлюзового ротора 4 в или у зоны С выталкивания, причем он приводится в действие механизмом Е с возможностью перемещения из исходного положения вне шлюзовой камеры в положение выбрасывания в шлюзовую камеру 3 и транспортировки застрявшей там емкости 1 в зону С выталкивания.
В другом случае (фиг. 2-4 ) каждой шлюзовой камере 3 придан, по меньшей мере, один собственный выталкивающий элемент D, который перемещается либо каждый раз в положение выбрасывания, когда соответствующая шлюзовая камера 3 попадает в зону С выталкивания, либо только тогда, когда непредусмотренным образом в шлюзовой камере 3 застряла емкость 1, которая должна была бы быть извлечена захватно-удерживающим механизмом 24 из шлюзовой камеры 3.
У непоказанной формы выполнения каждый выталкивающий элемент D шлюзовой камеры 3 мог бы взаимодействовать с собственным механизмом перемещения, который, как и выталкивающий элемент D, вращается вместе со шлюзовым ротором 4.
Предпочтение следует, однако, отдать форме выполнения (фиг. 2-4), у которой для каждой зоны С выталкивания предусмотрен только один, общий для всех выталкивающих элементов D механизм Е перемещения, а именно неподвижно внутри шлюзового ротора 4 на основании 33 (или при необходимости на крышке 51). Каждый механизм Е перемещения ориентирован приблизительно по угловому положению соответствующей зоны С выталкивания.
На фиг. 2 выталкивающий элемент D представляет собой поворотный рычаг 8, который установлен в поворотной опоре S на стенке 3а шлюзовой камеры и выталкивающей плитой 9 входит в шлюзовую камеру 2. Другой, свободный исполнительный конец рычага 8 взаимодействует с неподвижно закрепленной на основании 33 направляющей или кулачком 11. Направляющая соответственно кулачок 11 имеет отрезок 11а, который перемещает рычаг 8, приведенный пружиной (не показана), в исходное положение, обозначенное сплошными линиями, в положение выбрасывания, обозначенное штриховыми линиями, а именно тогда, когда соответствующая шлюзовая камера 3 начинает входить в зону С выталкивания. В остальном в зоне С выталкивания может быть предусмотрен сборник F или выбраковщик для емкостей.
При вращении шлюзового ротора 4, следовательно, каждый рычаг 8 на всякий случай дважды перемещается из исходного положения в обозначенное штриховыми линиями положение выбрасывания независимо от того, имеется ли в шлюзовой камере 3 непредусмотренно застрявшая емкость 1 или нет.
У формы выполнения на фиг.3 приданные шлюзовым камерам 3 выталкивающие элементы D выполнены в виде установленных с возможностью линейного перемещения толкателей 23', каждый из которых перемещается по целесообразно газоплотной направляющей 25 в стенке за шлюзовой камеры. Пружина 26 обеспечивает отведенное назад исходное положение толкателя 23', который своим исполнительным концом 27 ориентирован по установленной на основании 33 криволинейной направляющей 36, 36', положение которой совпадает с зоной С выталкивания.
Аналогично постоянно приводимой в действие форме выполнения на фиг. 2 криволинейная направляющая 36' может опираться, например, в точках 28 и 38 с возможностью перемещения каждого толкателя 23' при прохождении криволинейной направляющей 36' на всякий случай в положение выталкивания и транспортировки, затем непредусмотренным образом застрявшей емкости 1 (обозначена штриховыми линиями) в зону С выталкивания.
У второго, изображенного на фиг. 3 варианта приданный шлюзовой камере 3 толкатель 23' перемещается из исходного положения против усилия пружины 26 в положение выбрасывания только тогда, когда в шлюзовой камере 3 действительно находится непредусмотренно застрявшая емкость 1. Для этой цели механизм Е перемещения оборудован исполнительным устройством 29, которое перемещает криволинейную направляющую 36 вокруг выполненной в виде поворотной оси опоры 28 в обозначенное сплошными линиями положение. Опора 38 тогда отсутствует. Исполнительное устройство 29 представляет собой, например, пневмоцилиндр, снабжаемый через электромагнитный клапан 35 сжатым воздухом и отводимый назад под действием пружины, как только подача сжатого воздуха прервана. Вне шлюзового ротора 4 в направлении вращения перед зоной С выталкивания или вначале нее установлен датчик 39, который последовательно контролирует проходящие шлюзовые камеры на наличие непредусмотренно застрявшей емкости 1. Если датчик 39 устанавливает наличие в шлюзовой камере 3 обозначенной сплошными линиями емкости 1, то посредством связи между датчиком 39 и электромагнитным клапаном 35 активизируется исполнительное устройство 29, которое приводит криволинейную направляющую 36 в обозначенное сплошными линиями положение, так что эта обозначенная штриховыми линиями емкость 1 транспортируется тогда в зону С выталкивания.
На фиг. 4 в осевом разрезе шлюзового ротора 4 изображено расположение выталкивающих элементов D, например толкателей 23' на фиг. 3 и их механизмов Е перемещения, установленных посредством консолей на основании 33. Выталкивающие элементы D находятся под захватно-удерживающими механизмами 6 шлюзовых камер 3 и в положении по высоте, в котором они транспортируют емкости 1 плавно и в основном параллельно самим себе из шлюзовых камер 3 в соответствующую зону С выталкивания. Захватообразные захватно-удерживающие механизмы 6 шлюзового ротора 4 раскрываются обычно за счет неподвижного упора 16 или 14, так что они не мешают выталкиванию емкостей в зоне С выталкивания.
Датчик 39 может быть также установлен на звездочке 18 соответственно 20, причем тогда он при обнаружении пустого зажимообразного захватно-удерживающего механизма 24 активизирует исполнительное устройство с целью выталкивания вызвавшей пустое место незахваченной бутылки 1.
Изобретение относится к промышленному транспорту, в частности к устройству для непрерывной загрузки емкостей, например пластиковых бутылок. Устройство для непрерывной загрузки емкостей, в частности пластиковых бутылок, в камеру обработки и/или выгрузки из нее содержит, по меньшей мере, один приводимый во вращение шлюзовой ротор с открытыми наружу на наружной поверхности шлюзовыми камерами, по меньшей мере, одну установленную на наружной поверхности шлюзового ротора с возможностью вращения вместе с ним пару звездочек, расположенных на расстоянии друг от друга в направлении периферии шлюзового ротора, а также расположенные в шлюзовых камерах и на звездочках с возможностью взаимодействия между собой захватно-удерживающие механизмы для емкостей. На наружной поверхности шлюзового ротора между звездочками, по меньшей мере, одной пары предусмотрены зона выталкивания емкостей и для каждой зоны выталкивания, по меньшей мере, один выталкивающий элемент, установленный с возможностью перемещения из исходного положения в шлюзовую камеру в положение выбрасывания емкостей. Повышается надежность работы устройства. 15 з.п.ф-лы, 4 ил.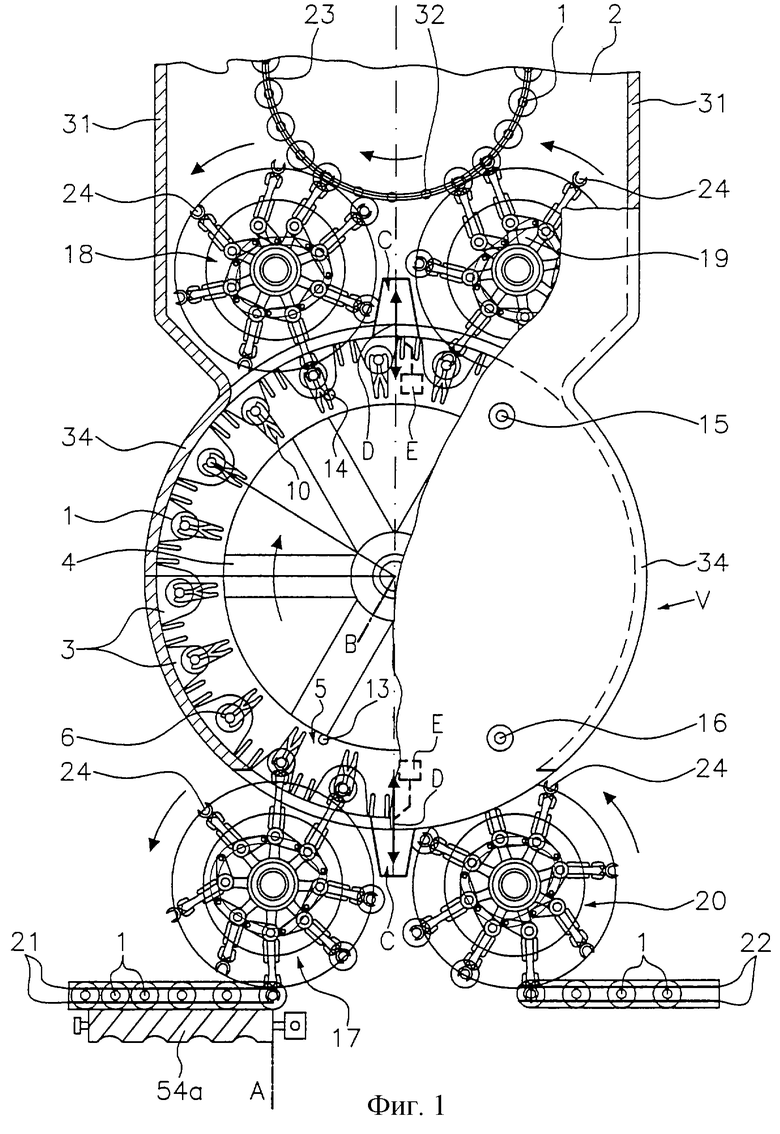
| WO 9840531 A, 17.09.1998 | |||
| RU 2063919 C1, 20.07.1996 | |||
| US 5558200 A, 24.09.1996 | |||
| US 3747740 A, 24.07.1973. |

