Изобретение относится к области навигационных систем с использованием излучения и измерения электромагнитных волн и может быть применено для точной посадки воздушных судов на взлетно-посадочную полосу (ВПП).
Известные способы посадки судов основаны на измерении электромагнитных полей аэродромных систем, измерении отраженных электромагнитных волн систем для определения высоты полета и скорости снижения главным образом на заключительных этапах полета при заходе на посадку и посадке (радиовысотомер) /1/. Радиотехнические системы, разработанные на этом способе и называемые радиомагнитными, основаны на измерении электромагнитных полей излучаемых радиомаяками.
В настоящее время используются несколько радиомаячных систем посадки: отечественные СП-50, СП-68, СП-70, СП-75 и международная JLS. В состав системы JLS входят три маркерных, курсовой и глиссадный радиомаяки. Маркерные маяки дальний (ДМРМ), средний (СМРМ) и ближний (БМРМ) устанавливаются на определенных расстояниях от торца ВПП. Они излучают вверх кодированные сигналы. В момент пролета судна над маяком эти сигналы принимаются и измеряются бортовой системой и по сигналам с выхода определяется тип маяка и, следовательно, дальность до начала ВПП.
Формирование в пространстве линий курса и глиссады планирования обеспечивается с помощью полей излучения курсовых радиомаяков (КРМ), которые формируют равносигнальную зону в вертикальной плоскости, и с помощью приемника канала курса измеряются знак и отклонение от линии курса. Данная система позволяет обеспечить вывод воздушных судов к ВПП.
Радиовысотомер малых высот (РВ) предназначается для измерения истинной высоты полета воздушного судна над земной поверхностью, РВ используется главным образом на заключительных этапах полета при заходе на посадку и посадке и является практически единственным средством для определения положения самолета в вертикальной плоскости и вычисления скорости снижения. Высотометр типа РВ-5 работает на частоте 4300 МГц и погрешность измерения малых высот при благоприятных метеорологических условиях составляет 10
Таким образом, недостатками современных способов посадки воздушных судов на ВПП, основанных на приеме и измерении высокочастотных электромагнитных полей, являются: зависимость погрешности измерений от метеоусловий; с уменьшением высоты полета резко увеличивается погрешность измерений, что приводит к необходимости визуальной (слепой) посадки.
Наиболее близким аналогом является система посадки, которая содержит электрический проводник, проложенный вдоль ВПП, создающий магнитное поле, а на летательном аппарате два измерителя магнитного поля, установленные на одинаковом расстояние от его продольной оси, по показаниям которых судят о смещении летательного аппарата относительно оси ВПП /2/.
Достоинством такой системы является ее простота по сравнению с существующими. Однако измерение компоненты магнитного поля двумя магнитометрами не дает полного представления о нахождении летательного аппарата над ВПП без знания высоты скорости снижения, угла между продольной линией ВПП и воздушного судна.
Целью изобретения является повышение точности посадки воздушного судна.
Эта цель достигается тем, что вдоль ВПП прокладывают систему электрических проводников, создающую магнитное поле, измеряют вертикальную и горизонтальную составляющую вектора магнитного поля магнитометрами, установленными на крыльях воздушного судна симметрично относительно продольной оси фюзеляжа. По разности сигналов, пропорциональных вертикальной составляющей, судят о смещении судна относительно оси ВПП, а по разности сигналов, пропорциональных горизонтальной составляющей, о значении угла между осевыми линиями ВПП и фюзеляжа. Измеряют горизонтальную составляющую вектора магнитного поля магнитометром, установленным на осевой линии фюзеляжа, по величине его сигнала судят о высоте полета судна над поверхностью Земли, а по изменению этого сигнала в заданный интервал времени судят о скорости снижения воздушного судна.
Систему электрических проводников прокладывают вдоль взлетно-посадочной полосы и подключают к генератору переменного тока. Размеры системы и ее прокладку вдоль ВПП выбирают и осуществляют таким образом, чтобы выполнялись условия: однородности горизонтальных и вертикальных составляющих компонент магнитного поля на участке точной посадки воздушного судна; однозначности изменения фазы любой компоненты магнитного поля при пересечении осевой линии ВПП; достаточного значения интенсивности поля компонент. Для привязки измерений характеристик полета воздушного судна к единому моменту времени датчики магнитометра устанавливают на одной линии, перпендикулярной осевой линии фюзеляжа. Выполнение этих условий необходимо для снижения погрешности и однозначности измерения высоты полета, смещения его относительно осевой линии ВПП, скорости снижения и курса полета.
Эти условия закладываются в точные уравнения, дающие однозначную связь между векторами индукции магнитного поля и его компонентами с координатами летательного аппарата в верхнем полупространстве. Использование этих уравнений и бортовой вычислительной машины позволяет непрерывно определять местоположение воздушного судна в системе координат, связанной с торцом ВПП и управлять режимом снижения. Причем точность определения координат воздушного судна с учетом направления и силы ветра непрерывно возрастает вплоть до момента касания с ВПП и является достаточной для полной автоматизации процесса посадки воздушного судна.
В настоящее время устанавливаются маркерные радиомаяки на участке перед ВПП на ее осевой линии. Используются три разномаяка на расстоянии, соответственно 100, 1050 и 7400 м от торца ВПП. При пролете воздушного судна над соответствующим радиомаяком его сигнал регистрируется бортовым маркерным радиоприемником (МРП), что позволяет идентифицировать маяк и определять дальность до торца ВПП.
В нашем случае вместо радиомаяков можно использовать контуры с током определенной частоты, проложенные на поверхности земли, создающие калиброванные магнитные поля, векторы которых направлены вверх. Приемниками этих полей будут те же предлагаемые компонентные датчики магнитного поля, устанавливаемые на воздушном судне.
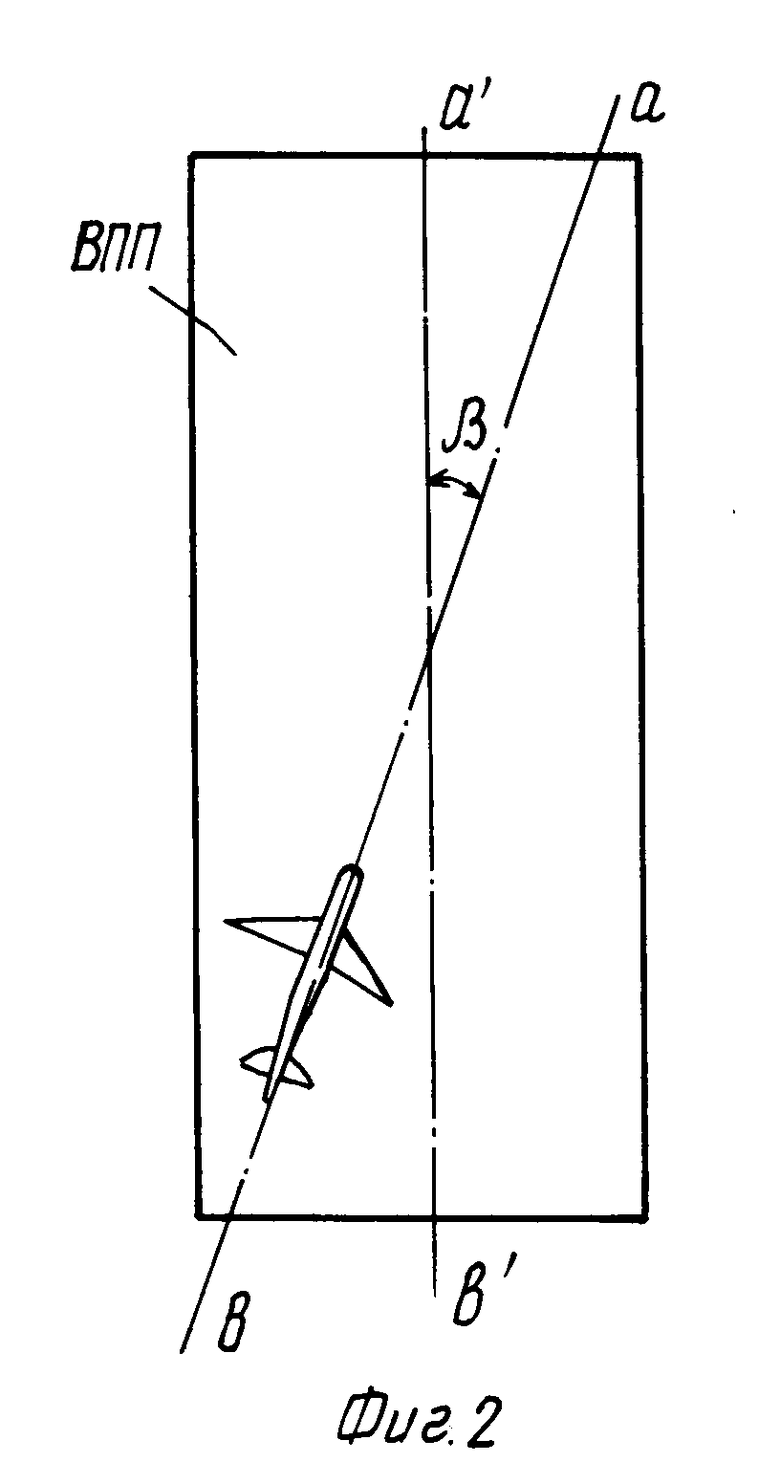
На фиг. 1 изображено определение вертикальных составляющих; на фиг. 2 - определение горизонтальных составляющих.
На примере однопроводной линии, проложенной вдоль ВПП, показана возможность реализации способа (фиг. 1, фиг. 2). Магнитометры 1, 2 устанавливают на крыльях судна и измеряют вертикальные составляющие магнитного поля B
Магнитометр 3 измеряет индукцию поля горизонтальной составляющей Bг в зависимости от высоты полета, а также скорость снижения судна; 4 - торец ВПП; 5 проводник с током; 6 концентрические условные линии магнитного поля с током.
По разности сигналов ΔU = K(B индукция поля вертикальных компонент в районе датчиков магнитометров 1, 2 судят о смещении судна относительно осевой линии ВПП. При B
индукция поля вертикальных компонент в районе датчиков магнитометров 1, 2 судят о смещении судна относительно осевой линии ВПП. При B
где μo магнитная постоянная, I сила тока в проводнике.
Скорость снижения судна определяется по изменению сигнала магнитометра 3 согласно выражению
Сигналы магнитометров 1, 2, 3 подаются в бортовую измерительно-информационную систему для принятия решений автоматизированной системой посадки судна на ВПП.
Преимущество предлагаемого способа заключается в том, что точность посадки не зависит от метеорологических условий. С уменьшением высоты полета увеличивается точность измерения высоты, скорости снижения, смещения судна относительно осевой линии ВПП, курса полета, т. к. увеличивается отношение сигнала к шуму на выходе магнитометров. Особое значение предлагаемый способ приобретает при чрезвычайных ситуациях, когда необходимо в короткие сроки создать условия надежности посадки воздушных судов (самолетов, вертолетов).
Использование: системы посадки воздушных судов. Сущность: способ точной посадки воздушных судов предусматривает прокладку системы электрических проводников вдоль взлетно-посадочной полосы и измерение вертикальной и горизонтальной составляющей электромагнитного поля магнитометрами, установленными на крыльях и на центральной осевой линии фюзеляжа воздушного судна. 2 ил.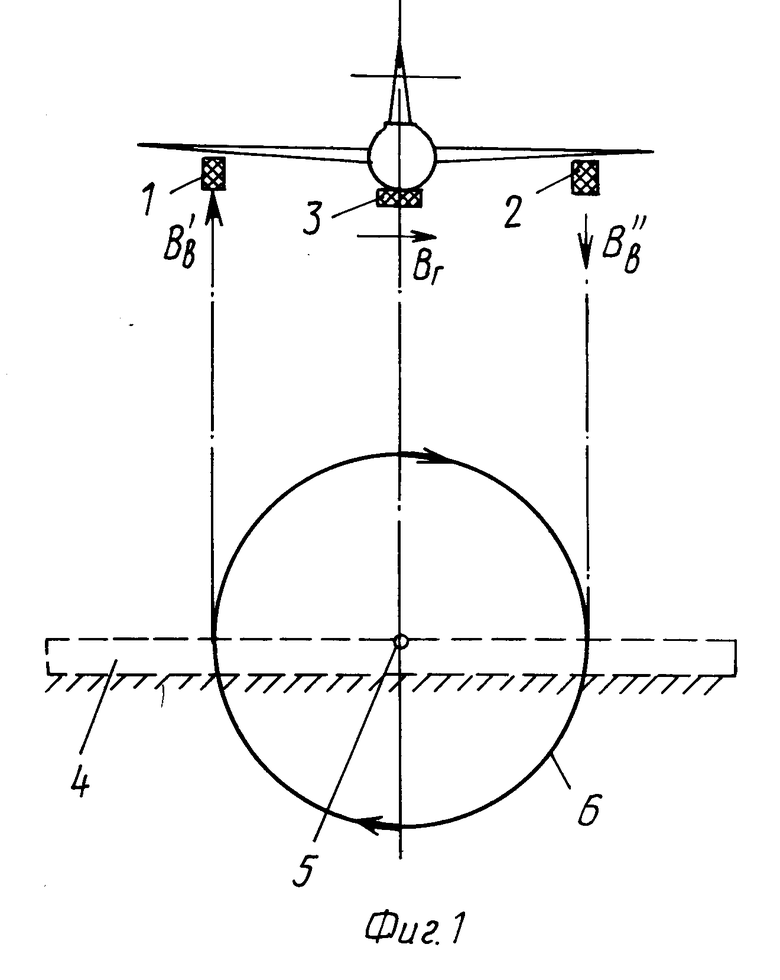
Способ точной посадки воздушных судов на взлетно-посадочную полосу (ВПП), включающий создание электромагнитного поля путем прокладывания системы электрических проводников вдоль ВПП, измерение составляющих вектора магнитного поля измерителями, установленными симметрично на некотором расстоянии от продольной оси воздушного судна, определение смещения судна относительно оси ВПП, отличающийся тем, что измеряют вертикальную и горизонтальную составляющие вектора магнитного поля магнитометрами, установленными на крыльях воздушного судна, и по разности сигналов, пропорциональных вертикальной составляющей, судят о смещении судна относительно ВПП, а по разности сигналов, пропорциональных горизонтальной составляющей, о значении угла между осевыми линиями ВПП и фюзеляжа, измеряют горизонтальную составляющую вектора магнитного поля путем установки магнитометра на центральной осевой линии фюзеляжа воздушного судна, по величине его сигнала судят о высоте полета судна над поверхностью Земли, а по изменению этого сигнала в заданный интервал времени судят о скорости снижения воздушного судна.
| КАРКАС ДЕЛЬТАПЛАНА ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1992 |
|
RU2007336C1 |
| Нефтяной конвертер | 1922 |
|
SU64A1 |

