Изобретение относится к области измерительной техники и может быть использовано для бесконтактного измерения формы поверхности сложных трехмерных объектов в машиностроении, медицине, стоматологии, судебно-медицинской экспертизе и т.д.
Известен способ, реализующий принцип сканирующей подсветки, который используют в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности [Техническое зрение роботов. - Под ред. А.Пью, пер. с англ. - М.: Машиностроение, 1987, с.56-57]. Способ заключается в том, что последовательно сканируют отдельные контуры поверхности светящейся полосой и судят о контролируемых размерах по степени искажения изображения полосы и местоположению полосы в декартовой системе координат.
Недостатком известного способа является низкая точность и длительное время контроля, связанные с наличием операции и блока сканирования.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [патент РСТ WO 00/70303, РСТ/US99/70303, G01B 11/24, 23.11.2000]. Способ заключается в том, что на объект проецируют систему разноцветных полос, создаваемую путем пространственной модуляции вдоль одной координаты интенсивности зондирующего оптического излучения. Система разноцветных полос носит периодический характер и создает структурированную подсветку. В результате в одном кадре регистрируют целиком всю попадающую в поле зрения фотоприемного устройства часть поверхности контролируемого объекта и наложенное на поверхность искаженное изображение структурированной подсветки. О контролируемых размерах судят по степени искажений изображения множества полос и местоположению полос в декартовой системе координат.
Недостатком известного способа является низкая точность, связанная с невозможностью однозначно интерпретировать разрывы в изображении полос, искаженных либо рельефом поверхности контролируемого объекта, либо низким значением спектрального коэффициента отражения, зависящего от материала и цвета какого-либо участка поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [М.Франсон. Оптика спеклов. - М.: Мир, 1980, с.141-143]. Способ заключается в том, что на объект проецируют систему концентрических полос, создаваемую путем подсветки когерентным излучением, содержащим спекл-структуру, либо в виде системы концентрических полос, либо в виде хаотично расположенных зон, форма которых единообразна. Искаженная рельефом поверхности структурированная подсветка регистрируется при изменении длины волны излучения, по меньшей мере, два раза. Полученная таким образом псевдоголограмма содержит систему интерференционных полос, расстояние между которыми в разных точках соответствует высоте рельефа. Соответствующая обработка на ЭВМ совокупности данных о величине вышеуказанных расстояний позволяет судить о рельефе поверхности контролируемого объекта.
Недостатком известного способа является низкая достоверность получаемых о контролируемой поверхности данных на участках поверхности, характер отражения которых резко отличается от диффузного.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [патент РСТ WO 99/58930, PCT/US99/106777, G01B 11/24, 1999 г.]. Способ заключается в формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определении с помощью цифрового электронного вычислителя высоты рельефа поверхности контролируемого объекта по величине искажений изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении.
Недостатком известного способа является высокая погрешность, обусловленная тем, что при направлении на поверхность контролируемого объекта, модулированного по одной координате транспарантом с неизменной периодической структурой оптического изучения, нельзя предусмотреть либо заранее учесть искажения картины, вызванные различными отражательными свойствами поверхности и глубокими впадинами, которые не возможно идентифицировать без априорной информации о макроструктуре поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам [патент РФ №2185598, G01B 11/24, 2003 г.]. Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения по одной координате так, что на поверхности контролируемого объекта создается изображение структурированной подсветки в виде апериодической совокупности полос, регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки, которую производят путем накопления суммарного изображения, определении положения искажений структуры подсветки в зарегистрированных изображениях по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализации апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы.
Недостатком известного способа является низкая точность определения линейных размеров, ограниченная точностью определения координат формируемой полосы на регистраторе изображения. Низкая точность определения координат полосы обусловлена сложностью детектирования полосы на участках объекта, имеющих различные отражательные свойства. Кроме того, поперечный размер полосы на регистраторе, влияющий на точность определения координат, зависит от угла между нормалью к поверхности и осью излучения структурированной подсветки.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранный в качестве прототипа способ определения линейных размеров трехмерных объектов по трем декартовым координатам [патент РФ №2334195, G01B 11/24, 2008 г.]. Способ заключается в том, что для каждой точки измеряемого объекта определяют зависимость интенсивности зарегистрированного излучения от номера изображения, используют полученные калибровкой калибровочной поверхности зависимости интенсивности зарегистрированного излучения от номера изображения для точек калибровочной поверхности при ее различных расстояниях до поверхности, определенной как базовая, и для определения высоты рельефа поверхности измеряемого объекта определяют расстояние от базовой поверхности до точки калибровочной поверхности, в которой зависимость интенсивности освещения от номера изображения в наибольшей степени подобна зависимости в исследуемой точке измеряемого объекта.
Недостатком известного способа является сложность практической реализации процедуры калибровки системы. Точность измерения напрямую зависит от точности калибровки измерителя, а для проведения калибровки системы, работающей известным способом, необходимо обеспечить высокоточный контроль перемещений плоской калибровочной поверхности. Погрешность измерения данным способом будет напрямую зависеть от погрешности перемещения плоской поверхности и отклонения геометрии этой плоской поверхности от идеальной плоскости. При измерении этим способом крупногабаритных объектов себестоимость калибровочной плоскости и инфраструктуры для ее перемещения будет превышать стоимость всей остальной измерительной базы системы, реализующей данный способ измерения.
Сущность заявляемого изобретения выражается в совокупности существенных признаков, достаточных для достижения предлагаемым изобретением технического результата, который выражается в упрощении процедуры калибровки измерителя и уменьшении стоимости измерителя, работающего таким способом.
Заявленная совокупность существенных признаков находится в прямой причинно-следственной связи с достигаемым результатом.
Новизна предложенного метода усматривается в том, что используют калибровочную мишень, которую размещают во многих точках пространства, определяют ее координаты в пространстве, находят функциональную зависимость координат мишени в пространстве от интенсивности зарегистрированного излучения и координат точек на зарегистрированных изображениях поверхности объекта и используют найденную функциональную зависимость для определения координат точек поверхности измеряемого объекта в пространстве.
Сравнение заявленного способа с прототипом позволило установить соответствие его критерию "новизна", так как оно неизвестно из уровня техники.
Предложенный способ бесконтактного измерения линейных размеров трехмерных объектов является промышленно применимым существующими средствами и соответствует критерию "изобретательский уровень", т.к. он явным образом не следует из уровня техники, при этом из последнего не выявлено каких-либо преобразований, характеризуемых отличительными от прототипа существенными признаками, направленных на достижение указанного технического результата.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Других технических решений аналогичного назначения с подобными существенными признаками заявителем не обнаружено.
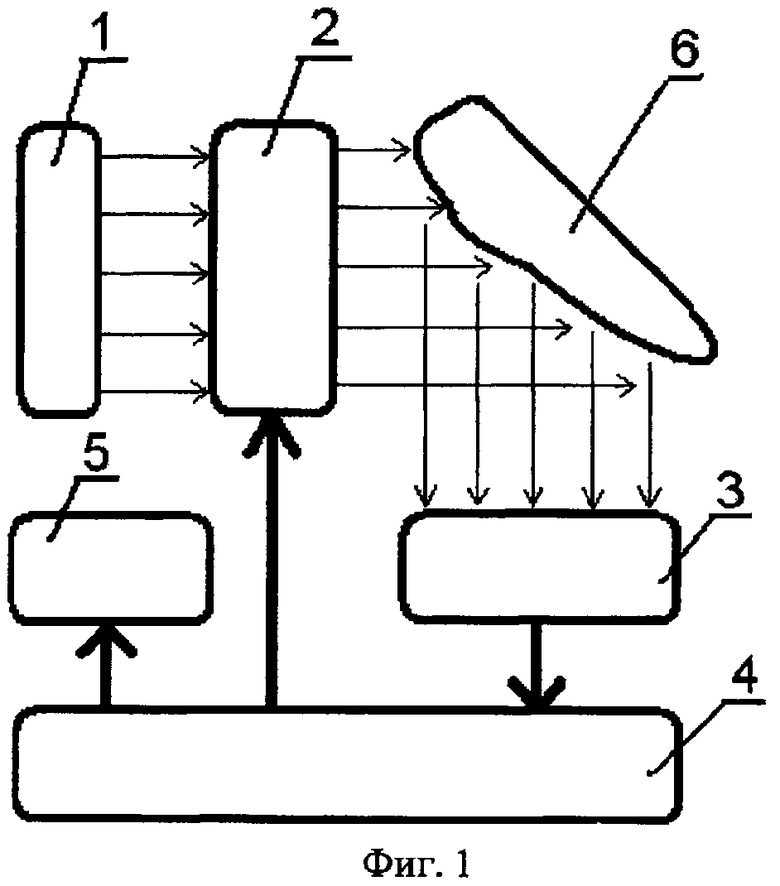
На фиг.1 изображена схема устройства, реализующего предлагаемый способ. Устройство содержит источник оптического излучения 1, пространственный модулятор интенсивности 2, фоторегистратор 3, цифровой электронный блок 4, блок регистрации результатов 5 и измеряемый объект 6. Вход цифрового электронного блока 4 соединен с выходом фоторегистратора 3, а выход соединен с управляющим входом модулятора 2.
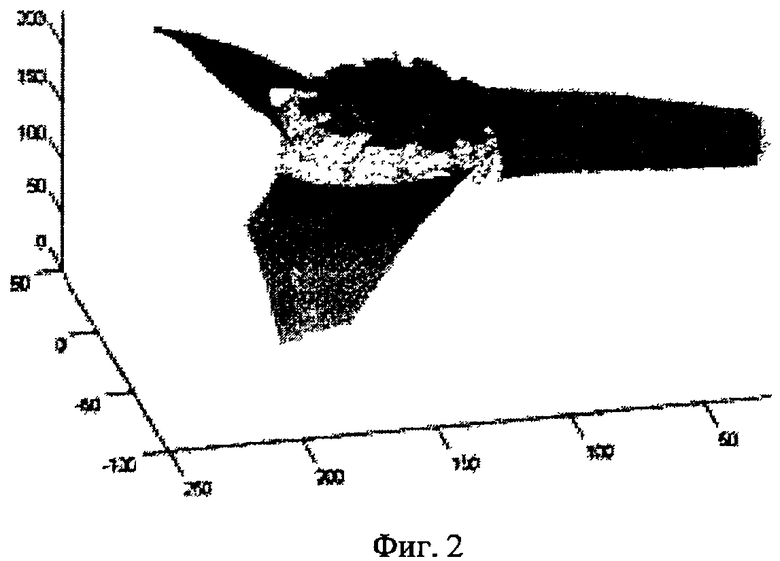
На фиг.2 представлен результат бесконтактного измерения линейных размеров пропеллера бытового вентилятора предлагаемым способом.
Перед проведением измерения контролируемого объекта выполняют калибровку калибровочной мишенью, на которую нанесены координатные метки. Калибровочная мишень размещается в пространстве. Декартовые координаты мишени определяются любым известным способом, например с помощью измерительной линейки. Интенсивность оптического излучения источника 1 модулируют пространственным модулятором света 2. Созданную таким образом структурируемую подсветку проецируют на координатные метки, расположенные на калибровочной мишени. Регистрируют изображение координатных меток фоторегистратором 3 и передают на вход электронного блока 4. Преобразуют сигнал с выхода фоторегистратора 3 электронным блоком 4 и записывают очередное изображение структурируемой подсветки во внутреннее запоминающее устройство. Одновременно в памяти электронного блока 4 записывают изображение структурированной подсветки, созданной пространственным модулятором 2. Перечисленную выше последовательность повторяют второй раз, но при этом по сигналу с выхода цифрового электронного блока 4 формируют модулятором 2 структурированную подсветку, соответствующую второй реализации. Число повторений вышеописанного цикла и количество реализации структурированных подсветок устанавливают в зависимости от требуемой и практически ничем не ограниченной точности определения линейных размеров контролируемого объекта. В результате во внутреннем запоминающем устройстве электронного блока 4 формируют набор изображений координатных меток, нанесенных на калибровочной мишени. Далее проводят серию аналогичных измерений для калибровочной мишени, при другом расположении координатных меток в пространстве с сохранением результатов в электронном блоке 4.
На основе полученных изображений калибровочной мишени строят функциональную зависимость 3 декартовых координат в пространстве от координат точки на изображениях объекта и зависимости интенсивности изображения в точке от номера изображения. Для построения этой зависимости используют любые известные методы оптимизации, например метод наименьших квадратов либо алгоритм на основе нейронных сетей.
Измерение контролируемого объекта осуществляют следующим образом. Источник оптического излучения 1, пространственный модулятор 2, фоторегистратор 3 располагаются в тех же положениях, что и при выполнении калибровки. Электронный блок 4 программируется таким образом, чтобы пространственный модулятор 2 формировал последовательность реализации структурированных подсветок точно такую же, какая формировалась при калибровке.
Интенсивность оптического излучения источника 1 модулируют пространственным модулятором света 2. Созданную таким образом структурированную подсветку проецируют на поверхность контролируемого объекта 5, рельеф которой известным образом искажает изображение структурируемой подсветки. Регистрируют изображение контролируемого объекта 5 фоторегистратором 3 и передают на вход электронного блока 4. Преобразуют сигнал с выхода фоторегистратора 3 электронным блоком 4 и записывают очередное изображение структурируемой подсветки во внутреннее запоминающее устройство. Одновременно в памяти электронного блока 4 записывают изображение структурированной подсветки, созданной пространственным модулятором 2. Перечисленную выше последовательность повторяют второй раз, но при этом по сигналу с выхода цифрового электронного блока 4 формируют модулятором 2 структурированную подсветку, соответствующую второй реализации. Число повторений вышеописанного цикла и количество реализации структурированных подсветок устанавливают в зависимости от требуемой и практически ничем не ограниченной точности определения линейных размеров контролируемого объекта.
После получения изображений контролируемого объекта для каждой точки на изображениях контролируемого объекта определяют три координаты этой точки в пространстве, используя функциональную зависимость координат в пространстве от координат точки на изображениях объекта и зависимости интенсивности изображения в точке от номера изображения, полученную в результате калибровки. Использование функции зависимости интенсивности освещения от номера изображения, устойчивой к ошибке определения интенсивности, обеспечивает устойчивость алгоритма измерения к определению поля координат контролируемого объекта.
Способ позволяет определять линейные размеры трехмерных объектов независимо от отражательных свойств поверхности и наличия глубоких впадин. В результате упрощается процедура калибровки измерителя и уменьшается стоимость измерителя, работающего таким способом. Более того, использование большого количества измерений калибровочных мишеней позволит повысить точность и достоверность измерения.
Для экспериментального подтверждения работоспособности предлагаемого способа были проведены трехмерные бесконтактные измерения линейных размеров пропеллера бытового вентилятора. Результат представлен на фиг.2. В качестве функции зависимости интенсивности освещения от номера изображения была взята функция в виде одного периода синусоиды. Подобность зависимостей интенсивности от номера изображения при калибровке и при измерении объекта определяли с помощью начального сдвига фазы синусоиды. Калибровку проводили на основе двенадцати измерений калибровочной мишени, расположенной в различных точках в объеме 200×200×100 мм.
Таким образом, использование предлагаемого способа позволяет измерять линейные размеры трехмерных объектов любой сложности с высокой точностью, не зависящей от отражательных свойств поверхности.
Способ можно с успехом использовать в технологических процессах создания объектов сложной формы (лопатки турбин и т.п.). Кроме того, способ можно использовать в различных приложениях компьютерной трехмерной графики.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов | 2021 |
|
RU2772088C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ ТЕПЛОВИЗИОННОГО РАСПОЗНАВАНИЯ ФОРМЫ ОБЪЕКТОВ | 2010 |
|
RU2431936C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199717C2 |
Изобретение относится к области измерительной техники и может быть использовано для бесконтактного измерения формы поверхности сложных трехмерных объектов в машиностроении, медицине, стоматологии, судебно-медицинской экспертизе и т.д. Способ бесконтактного измерения линейных размеров трехмерных объектов заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения и последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки. Для каждой точки контролируемого объекта определяют зависимость интенсивности зарегистрированного излучения от номера изображения. Для определения координат точки контролируемого объекта в пространстве используют калибровку калибровочной мишенью. Технический результат - упрощение процедуры калибровки, уменьшение стоимости измерителя, повышение точности и достоверности контроля. 2 ил.
Способ бесконтактного контроля линейных размеров трехмерных объектов, заключающийся в многократном формировании на поверхности объекта зондирующей структурированной подсветки путем освещения поверхности объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности объекта структуры зондирующей подсветки, определении координат точки поверхности контролируемого объекта по динамике интенсивности зарегистрированного излучения и координатам точки на зарегистрированных изображениях поверхности объекта, отличающийся тем, что используют калибровочную мишень, которую размещают во многих точках пространства, определяют ее координаты в пространстве, находят функциональную зависимость координат мишени от интенсивности зарегистрированного излучения и координат точек на зарегистрированных изображениях поверхности объекта и используют найденную функциональную зависимость для определения координат точек поверхности измеряемого объекта в пространстве.
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2284469C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2007 |
|
RU2365876C2 |
| JP 11063954 А, 05.03.1999. | |||

