Изобретение относится к области измерительной техники и может быть использовано для бесконтактного измерения формы поверхности динамичных, в том числе вращающихся, трехмерных объектов в машиностроении.
Известен способ, реализующий принцип сканирующей подсветки, который используется в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности. Способ заключается в том, что последовательно сканируют отдельные контуры поверхности светящейся полосой и судят о контролируемых размерах по степени искажения изображения полосы и местоположению полосы в декартовой системе координат (см., например, Техническое зрение роботов / под ред. А. Пью, пер. с англ. - М.: Машиностроение, 1987, с. 56-57).
Недостатком известного способа является низкая точность и длительное время контроля, связанные с наличием операции и блока сканирования.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система разноцветных полос, создаваемая путем пространственной модуляции вдоль одной координаты интенсивности зондирующего оптического излучения. Система разноцветных полос носит периодический характер и создает структурированную подсветку. В результате в одном кадре регистрируется целиком вся попадающая в поле зрения фотоприемного устройства часть поверхности контролируемого объекта и наложенное на поверхность искаженное изображение структурированной подсветки. О контролируемых размерах судят по степени искажений изображения множества полос и местоположению полос в декартовой системе координат (см., например, описание изобретения к патенту РСТ WO 00/70303, РСТ / US99 / 70303, кл. G01В 11/24, 23.11.2000).
Недостатком известного способа является низкая точность, связанная с невозможностью однозначно интерпретировать разрывы в изображении полос, искаженных либо рельефом поверхности контролируемого объекта, либо низким значением спектрального коэффициента отражения, зависящего от материала и цвета какого-либо участка поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система концентрических полос, создаваемая путем подсветки когерентным излучением, содержащим спектр-структуру либо в виде системы концентрических полос, либо в виде хаотично расположенных зон, форма которых единообразна. Искаженная рельефом поверхности структурированная подсветка регистрируется при изменении длины волны излучения, по меньшей мере, два раза. Полученная таким образом псевдоголограмма содержит систему интерференционных полос, расстояние между которыми в разных точках соответствует высоте рельефа. Соответствующая обработка на ЭВМ совокупности данных о величине вышеуказанных расстояний позволяет судить о рельефе поверхности контролируемого объекта (см., например, М. Франсон. Оптика спектров. - М.: Мир, 1980, с. 141-143).
Недостатком известного способа является низкая достоверность получаемых данных о контролируемой поверхности на участках поверхности, отражение которых резко отличается от диффузного.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения с помощью цифрового электронного вычислителя высоты рельефа поверхности контролируемого объекта по величине искажений изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении (см., например, описание изобретения к патенту РСТ WO 99/58930, PCT / US99 / 106777, кл. G01В 11/24 1999 г.).
Недостатками известного способа является высокая погрешность обусловленная тем, что при направлении на поверхность контролируемого объекта модулированного по одной координате транспарантом с неизменной периодической структурой оптического изучения нельзя предусмотреть либо заранее учесть искажения картины, вызванные различными отражательными свойствами поверхности и глубокими впадинами, которые невозможно идентифицировать без априорной информации о макроструктуре поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения по одной координате, так, что на поверхности контролируемого объекта создается изображение структурированной подсветки в виде апериодической совокупности полос, регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки, которую производят путем накопления суммарного изображения, определения положения искажений структуры подсветки в зарегистрированных изображениях по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализации апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы (RU 2185598, кл. G01B 11/24, 2003 г.).
Недостатком известного способа является низкая точность определения линейных размеров, ограниченная точностью определения координат формируемой полосы на регистраторе изображения. Низкая точность определения координат полосы обусловлена сложностью детектирования полосы на участках объекта, имеющих различные отражательные свойства. Кроме того, поперечный размер полосы на регистраторе, влияющий на точность определения координат, зависит от угла между нормалью к поверхности и осью излучения структурированной подсветки. Более того, данный способ нельзя применять для измерения динамически движущегося объекта, так как регистрируемые изображения будут содержать искажения подсветки, вызванные рельефом поверхности и изменением пространственного положения объекта.
Известен способ и устройство для определения рельефа поверхности объекта (RU 2042920, кл. G01B 11/24, 1992 г.), заключающийся в освещении поверхности объекта линейкой равноотстоящих одинаковых световых пятен, регистрации изображения поверхности и вращении объекта в процессе измерения в плоскости линейки световых пятен и направления распространения света.
Недостатком данного способа является малый диапазон измерения, ограниченный расстоянием между световыми пятнами, и малая точность измерений, ограниченная размером каждого светового пятна.
Наиболее близким по технической сущности заявляемому способу является известный (RU 2439489, кл. G01B 11/24, 2010 г.) способ бесконтактного контроля линейных размеров трехмерных объектов. Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях.
Недостатком предложенного способа является невозможность измерить динамически движущийся объект, так как регистрируемые изображения будут содержать искажения подсветки, вызванные рельефом поверхности и изменением пространственного положения объекта.
Задачей предложенного технического решения является точность определения линейных размеров вращающихся трехмерных объектов.
Поставленная задача решается благодаря предлагаемому способу бесконтактного измерения линейных размеров вращающихся трехмерных объектов, включающий многократное формирование на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях. Согласно изобретению используют сигнал синхронизации для регистрации изображения вращающегося объекта, находящегося каждый раз в одном и том же заданном положении в пространстве в момент регистрации изображения.
Технический результат достигается благодаря использованию синхронизации фоторегистратора и положения вращающегося объекта, обеспечивающей достоверную регистрацию изображений измеряемого объекта, находящегося в одном и том же положении в пространстве (измерения выполняют в одном и том же условно выбранном угле поворота объекта в пространстве).
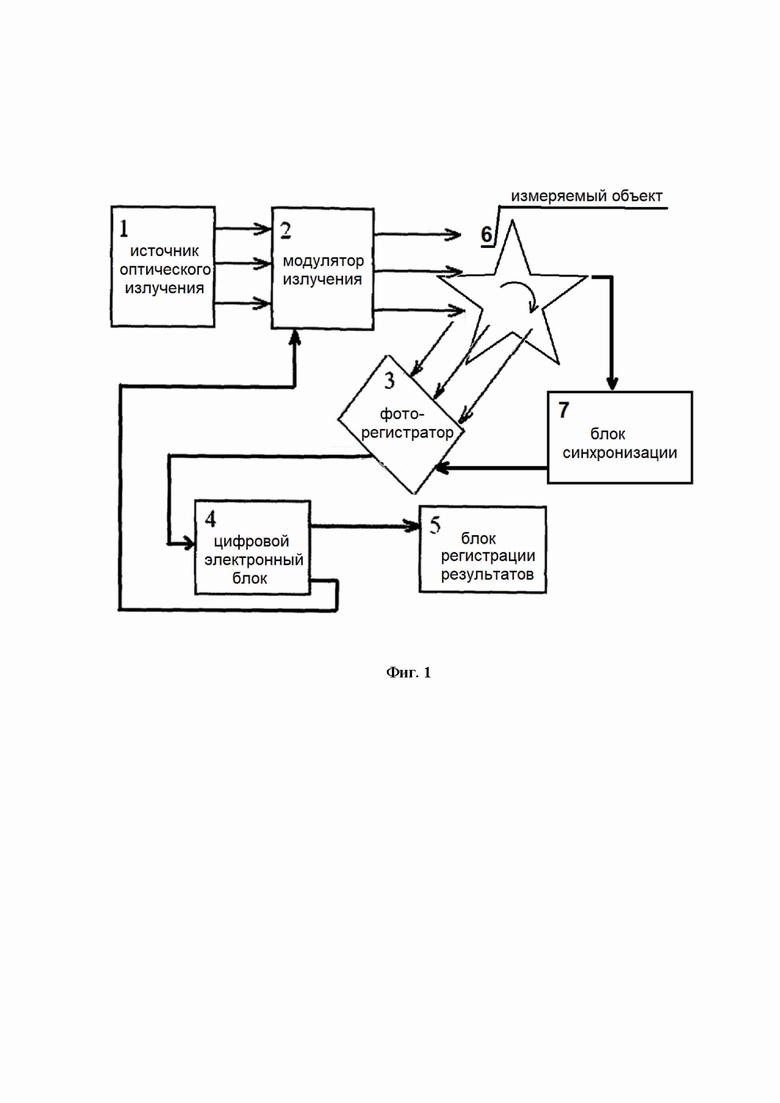
На рисунке изображена схема устройства, реализующего предлагаемый способ. Устройство содержит источник оптического излучения 1, пространственный модулятор интенсивности излучения 2, фоторегистратор 3 с оптическим затвором, цифровой электронный блок 4, блок регистрации результатов измерений 5, измеряемый объект 6, блок синхронизации 7 положения измеряемого объекта (условный угол) в пространстве с моментом фиксации его фоторегистратором. Вход цифрового электронного блока 4 соединен с выходом фоторегистратора 3, а выход соединен с управляющим входом модулятора излучения 2. На блок синхронизации 7 поступает сигнал с измеряемого вращающегося объекта 6 для синхронизации с оптическим затвором фоторегистратора 3. Сигнал поступает, когда измеряемый вращающейся объект, каждый раз находится в одном и том же заданном заранее положении в пространстве.
Способ бесконтактного контроля линейных размеров вращающихся трехмерных объектов осуществляют следующим образом.
Интенсивность оптического излучения, выходящего из источника 1, модулируется пространственным модулятором излучения 2. Созданная таким образом, структурируемая подсветка проецируется на поверхность измеряемого вращающегося объекта 6, рельеф которого известным образом искажает изображение структурируемой подсветки. На модуль синхронизации 7 поступает сигнал синхронизации, в момент, когда вращающийся объект 6 занимает условно заданное пространственное положение (определенный угол) которое и регистрируется фоторегистратором 3. После получения сигнала с модуля синхронизации 7 фоторегистратор 3 регистрирует изображение контролируемого вращающегося объекта и передает на вход электронного блока 4. Электронный блок 4 преобразует сигнал с выхода фоторегистратора 3 и записывает очередное изображение структурируемой подсветки во внутреннее запоминающее устройство. Одновременно в памяти электронного блока 4 записывается изображение структурированной подсветки, созданной пространственным модулятором интенсивности излучения 2. Перечисленная выше последовательность повторяется несколько раз, но при этом по сигналу с выхода цифрового электронного блока 4 модулятор 2 формирует структурированную подсветку, соответствующую следующей реализации. Число повторений вышеописанного цикла и количество реализации структурированных подсветок устанавливаются в зависимости от требуемой точности определения линейных размеров контролируемого вращающегося объекта и, практически, ничем не ограничены. Направления освещения и наблюдения устанавливаются различными. Профиль поверхности восстанавливается из величины искажений наблюдаемых изображений структурируемых подсветок.
Предлагаемый способ позволяет определять линейные размеры трехмерных вращающихся объектов, независимо от отражательных свойств поверхности и наличия глубоких впадин. В результате повышается точность и достоверность измерения параметров вращающегося объекта.
Таким образом, использование предлагаемого способа позволяет измерять линейные размеры вращающихся трехмерных объектов любой сложности конфигурации, с высокой точностью, не зависящей от отражательных свойств поверхности.
Источники информации
1. Техническое зрение роботов / под ред. А. Пью, пер. с англ. - М.: Машиностроение, 1987, с. 56-57.
2. Патент РСТ WO 00/70303, РСТ / US99 / 70303, кл. G01В 11/24, 23.11.2000.
3. М. Франсон. Оптика спектров. - М.: Мир, 1980, с. 141-143.
4. Патент РСТ WO 99/58930, PCT / US99 / 106777, кл. G01В 11/24 1999 г.
5. Патент RU 2185598, кл. G01B 11/24, 2003 г.
6. Патент RU 2042920, кл. G01B 11/24, 1992 г.
7. Патент RU 2439489, кл. G01B 11/24, 2010 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185598C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ ЛАЗЕРНОГО ВИДЕОИЗМЕРЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ | 2007 |
|
RU2338998C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199717C2 |
Изобретение относится к области измерительной техники. Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях. При этом используют сигнал синхронизации фоторегистратора и вращающегося объекта, обеспечивающий регистрацию изображений измеряемого вращающегося объекта, находящегося в одном и том же положении в пространстве (измерения выполняют в одном и том же угле поворота объекта). Достигается повышение точности определения линейных размеров вращающихся трехмерных объектов. 1 ил.
Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов, включающий многократное формирование на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, каждый раз с управлением пространственной модуляцией интенсивности пучка оптического излучения, последовательной регистрации изображений искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определения высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, а двух других координат - по положению искажений структуры подсветки в зарегистрированных изображениях, отличающийся тем, что используют сигнал синхронизации, обеспечивающий регистрацию изображений измеряемого вращающегося объекта, который каждый раз находится в одном и том же заданном положении в пространстве в момент регистрации изображения.
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ ТЕЛ ВРАЩЕНИЯ С ОТРАЖАЮЩЕЙ ПОВЕРХНОСТЬЮ | 1995 |
|
RU2109250C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ПОВЕРХНОСТИ ОБЪЕКТА | 1992 |
|
RU2042920C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ДИАГНОСТИЧЕСКИХ, ТАКТИЧЕСКИХ И ТЕРАПЕВТИЧЕСКИХ ОШИБОК ПРИ НЕОТЛОЖНЫХ СОСТОЯНИЯХ НЕВРОЛОГИЧЕСКОГО ПРОФИЛЯ | 2000 |
|
RU2175231C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |

