Изобретение относится к области измерительной техники и может быть использовано для визуализации профилей трехмерных объектов.
Известны способ и устройства, реализующие принцип "структурированной подсветки", которые используются в трехмерной компьютерной анимации и некоторых других приложениях для регистрации формы поверхности. Способ заключается в том, что последовательно сканируют отдельные контуры поверхности светящейся полосой и судят о контролируемых размерах по степени искажения изображения полосы и местоположению полосы в декартовой системе координат (см. , например, Техническое зрение роботов. - под. ред. А. Пью.; пер. с англ. - М.: Машиностроение, 1987, с.56-57).
Недостатком известного способа и реализующих его устройств является низкая точность и длительное время контроля, связанные с наличием операции и блока сканирования.
Известен способ и устройство, его реализующее, для контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система разноцветных полос, создаваемая путем пространственной модуляции вдоль одной координаты интенсивности зондирующего оптического излучения. Система разноцветных полос носит периодический характер и создает структурированную подсветку. В результате в одном кадре регистрируется целиком вся попадающая в поле зрения фотоприемного устройства часть поверхности контролируемого объекта и "наложенное" на поверхность искаженное изображение структурированной подсветки. О контролируемых размерах судят по степени искажений изображения множества полос и местоположению полос в декартовой системе координат (см., например, описание изобретения к патенту РСТ WO 00/ 70303, РСТ/ US99/ 70303, кл. G 01 B 11/24, 23.11.2000).
Недостатком известного способа и реализующих его устройств является низкая точность, связанная с невозможностью однозначно интерпретировать разрывы в изображении полос, искаженных либо рельефом поверхности контролируемого объекта, либо сквозными отверстиями, либо низким значением спектрального коэффициента отражения, зависящего от цвета какого-либо участка поверхности контролируемого объекта.
Известен способ контроля линейных размеров трехмерных объектов по трем декартовым координатам. Способ заключается в том, что на объект проецируется система концентрических полос, создаваемая путем подсветки когерентным излучением, содержащим спекл-cтруктуру либо в виде системы концентрических полос, либо в виде хаотично расположенных зон, форма которых единообразна. Искаженная рельефом поверхности структурированная подсветка регистрируется при изменении длины волны излучения по меньшей мере два раза. Полученная таким образом псевдоголограмма содержит систему интерференционных полос, расстояние между которыми в разных точках соответствует высоте рельефа. Соответствующая обработка на ЭВМ совокупности данных о величине вышеуказанных расстояний позволяет судить о рельефе поверхности контролируемого объекта (см., например, М. Франсон. Оптика спеклов. - М.: Мир, 1980, с.141-143).
Недостатком известного способа является низкая достоверность получаемых данных о контролируемой поверхности на участках поверхности, отражение которых резко отличается от диффузного. Кроме того, сквозные отверстия также не удается идентифицировать, так как зоны структурированной подсветки характеризуются высокой степенью схожести.
Наиболее близким из известных по своей технической сущности и достигаемому результату является выбранный в качестве прототипа способ, реализующий известное устройство для контроля линейных размеров трехмерных объектов по трем декартовым координатам.
Способ заключается в формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определении с помощью цифрового электронного вычислителя высоты рельефа поверхности контролируемого объекта по величине искажений изображения структуры зондирующей подсветки, двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении (см., например, описание изобретения к патенту РСТ WO 99/58930, PCT/US99/106777, кл. G 01 B 11/24 1999г.)
Недостатками известного способа является высокая погрешность контроля и ограниченные функциональные возможности. Высокая погрешность измерения обусловлена тем, что при направлении на поверхность контролируемого объекта оптического изучения, промодулированного по одной координате транспарантом с неизменной периодической структурой нельзя предусмотреть либо заранее учесть искажения картины, вызванные глубокими впадинами и тем более сквозными отверстиями, которые невозможно идентифицировать без априорной информации о макроструктуре поверхности контролируемой поверхности. Ограниченные функциональные возможности обусловлены необходимостью доопределять форму полосы в местах разрыва ее изображения.
Сущность заявляемого изобретения выражается в совокупности существенных признаков, достаточных для достижения предполагаемым изобретением технического результата, который выражается в повышении точности контроля линейных размеров трехмерных объектов и расширении возможностей при проведении контроля.
Заявленная совокупность существенных признаков находится в прямой причинно-следственной связи с достигаемым результатом.
Новизна предложенного способа усматривается в том, что формирование на поверхности контролируемого объекта зондирующей структурированной подсветки осуществляют многократно, каждый раз управляя модуляцией пучка оптического излучения по одной координате, создавая на поверхности контролируемого объекта изображение структурированной подсветки в виде апериодической совокупности полос, регистрацию изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки производят путем накопления суммарного изображения, а положение искажений структуры подсветки в зарегистрированном изображении определяют по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализаций апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы.
Сравнение заявленного технического решения с прототипом позволило установить соответствие его критерию "новизна", так как оно не известно из уровня техники.
Предложенный способ является промышленно применимым существующими средствами и соответствует критерию "изобретательский уровень", т.к. он явным образом не следует из уровня техники, при этом из последнего не выявлено каких-либо преобразований, характеризуемых отличительными от прототипа существенными признаками, направленных на достижение указанного технического результата.
Таким образом, предложенное техническое решение соответствует установленным условиям патентоспособности изобретения.
Других технических решений аналогичного назначения с подобными существенными признаками заявителем не обнаружено.
На фиг. 1 изображена схема устройства, реализующего предлагаемый способ. Устройство содержит источник 1 оптического излучения, модулятор 2, объектив 3, фоторегистратор 4, установленный в плоскости изображения объектива 3, цифровой электронный блок 5, блок индикации регистрируемого изображения 6. Вход цифрового электронного блок 5 соединен с выходом фоторегистратора 4, а выход соединен с управляющим входом модулятора 2.
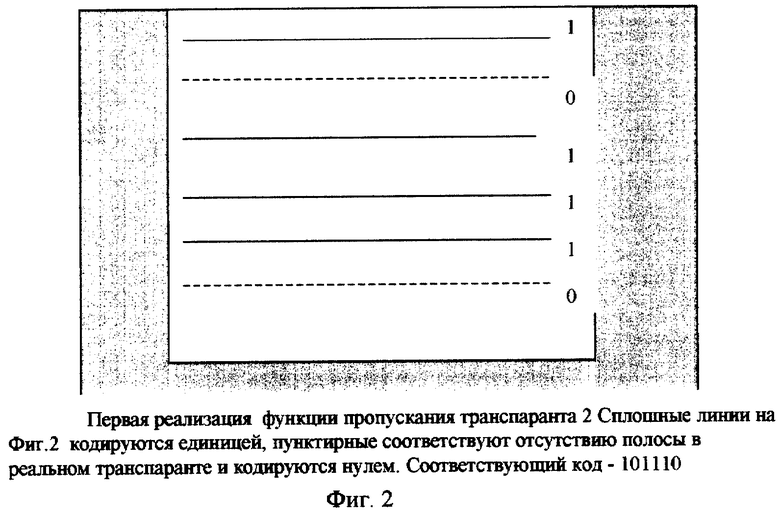
На фиг. 2 изображена первая реализация функции пропускания модулятора 2.
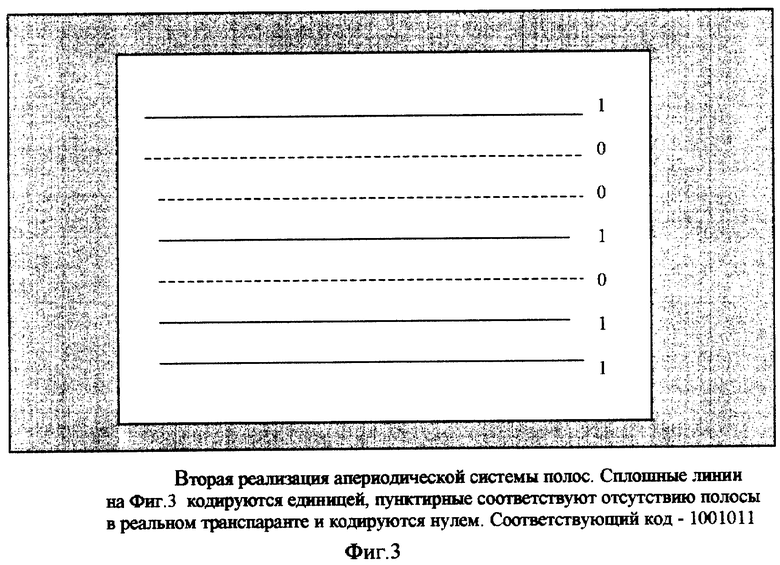
На фиг. 3 приведена вторая реализация функции пропускания модулятора 2. Сплошные линии на фиг.2 и 3 кодируются единицей, пунктирные соответствуют отсутствию полосы в и кодируются нулем. Обе реализации цифрового изображения линейчатой структуры и соответствующий им код в виде последовательности нулей и единиц хранятся в памяти цифрового блока 5.
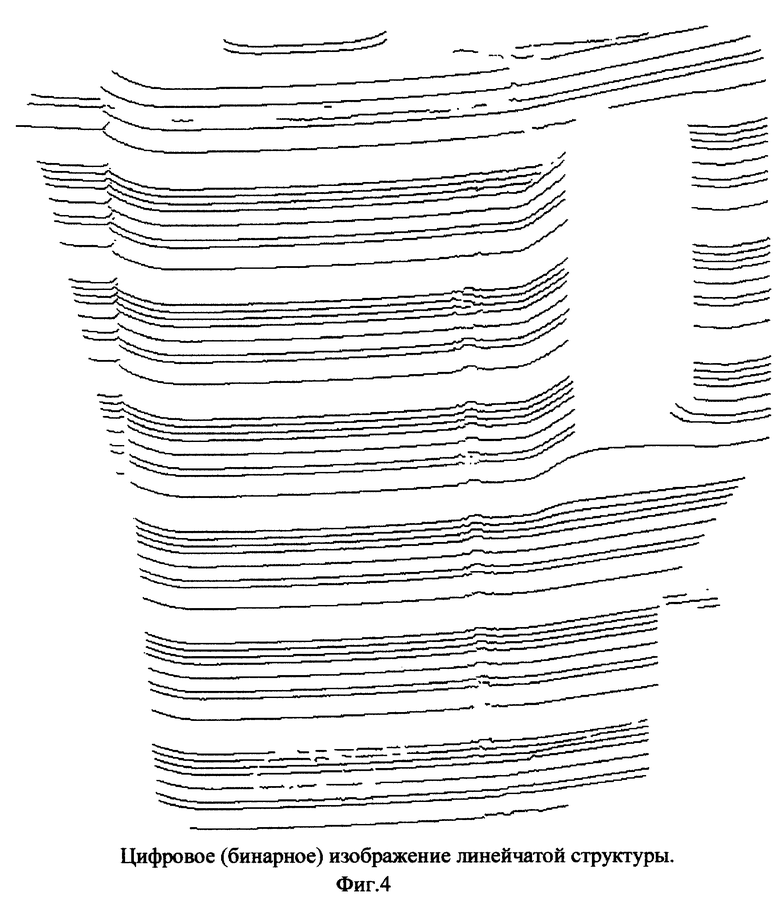
На фиг.4 приведено цифровое (бинарное) изображение линейчатой структуры, возникающей на поверхности контролируемого объекта при ее искажениях рельефом поверхности при подсветке линейчатой структурой, изображенной на фиг.2.
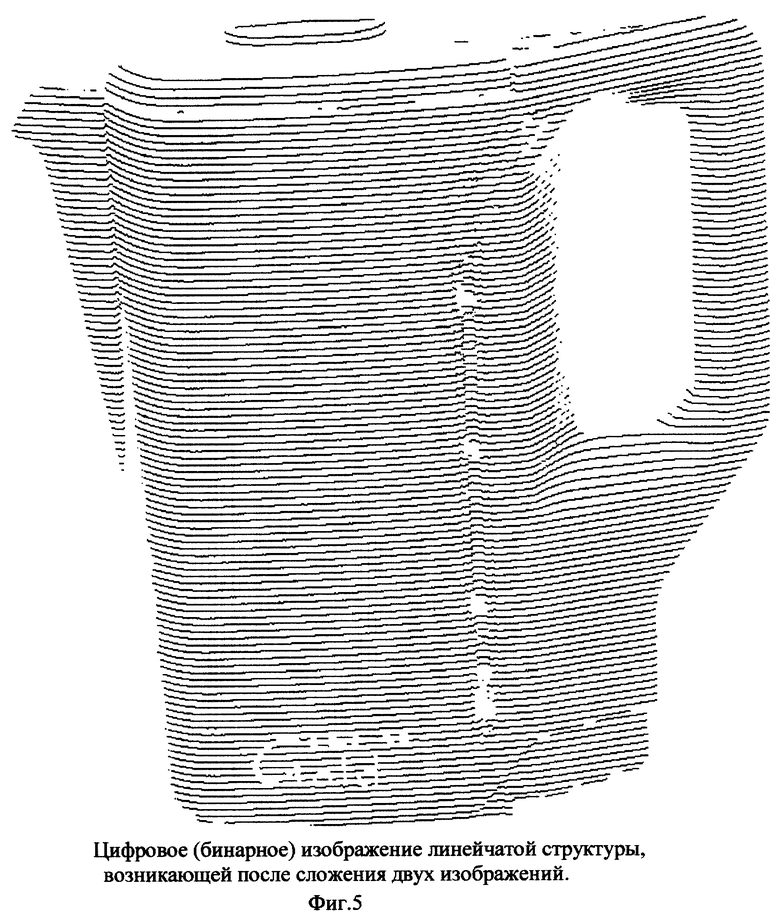
На фиг.5 приведено цифровое (бинарное) изображение линейчатой структуры, возникающее после сложения двух вышеуказанных изображений в электронном блоке 5.
Способ бесконтактного контроля линейных размеров трехмерных объектов осуществляют следующим образом.
Пучок оптического излучения, выходящий из источника 1, модулируется по одной координате пространственно-временным модулятором света 2. Созданная таким образом структурируемая подсветка в виде апериодической системы полос проецируется на поверхность контролируемого объекта, рельеф которой известным образом искажает изображение структурируемой подсветки, сформированной с помощью модулятора 2. Объектив 3 проецирует возникающую на контролируемой поверхности картину на чувствительную площадку фоторегистратора 4. Электронный блок 5 преобразует сигнал с выхода фоторегистратора 4 и записывает очередное изображение структурируемой подсветки во внутреннее запоминающее устройство путем суммирования с предыдущей записью. Первоначально в памяти хранится совокупность нулей. Одновременно в памяти электронного блока 5 записывается последовательность единиц и нулей, кодирующая последовательность линий в структурированной подсветке, сформированной первой реализацией структурной подсветки ("1" - линия есть, "0" - линии нет). Перечисленная выше последовательность повторяется второй раз, но при этом по сигналу с выхода цифрового электронного блока 5 модулятор 2 формирует структурированную подсветку, соответствующую второй реализации (фиг.3). В памяти электронного блока 5 формируется суммарная картина линейчатой структуры, возникающей на поверхности контролируемого объекта, искаженной рельефом поверхности контролируемого объекта (см.фиг.4). Одновременно в памяти электронного блока 5 формируется код, полученный суммированием кодовых последовательностей, соответствующих кодам первой и второй реализации функции пропускания транспаранта 2. При этом сумме двух единиц, т.е. изображений двух линий, соответствует код "11", а сумме изображений линии и пробела - коды "10" либо "01". Таким образом, каждая линия (полоса) в и цифровом (бинарном) суммарном изображении линейчатой структуры, возникающем после сложения двух вышеуказанных изображений в электронном блоке 5, кодируется номером в виде двоичного кода. Число повторений вышеописанного цикла устанавливается в зависимости от требуемой точности определения линейных размеров контролируемого объекта и практически ничем не ограничено.
Поскольку расстояния между полосами, образующими структурную подсветку, в зарегистрированной картине не повторяются, при обработке изображения в цифровом электронном блоке каждая полоса, искаженная рельефом поверхности контролируемого объекта, однозначно идентифицируется по своему коду (номеру), что, в свою очередь, делает возможным однозначно вычислять высоту рельефа и соответствующую пару координат. В результате повышается точность и достоверность контроля.
Оператор может наблюдать регистрируемую картину на экране блока 6 и, меняя режим работы блока 5, управлять характером модуляции пучка оптического излучения. Как вариант реализации, изменение характера модуляции может осуществляться автоматически. Искажения полосы пропорциональны высоте рельефа, местоположение возникших искажений на полосе соответствует второй координате, а номер полосы - третьей координате.
Данное предложение может с успехом использоваться в технологических процессах формообразования объектов сложной формы (лопатки турбин и. т.п.). Кроме того, оно может использоваться в различных приложениях компьютерной трехмерной графики.
ЛИТЕРАТУРА
М. Франсон. Оптика спеклов. - М.: Мир, 1980, с.141-143. Техническое зрение роботов. - под. ред. А. Пью.; пер. с англ. М.: Машиностроение, 1987. С.56-57.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2184933C1 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ И РАСПОЗНАВАНИЯ ПОВЕРХНОСТЕЙ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199718C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2185599C1 |
| СПОСОБ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199716C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2001 |
|
RU2199717C2 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2006 |
|
RU2334195C2 |
| Способ бесконтактного измерения линейных размеров вращающихся трехмерных объектов | 2021 |
|
RU2772088C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ГЕОМЕТРИИ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2010 |
|
RU2439489C1 |
| СПОСОБ БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЛИНЕЙНЫХ РАЗМЕРОВ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2009 |
|
RU2433372C2 |
| УСТРОЙСТВО ДЛЯ БЕСКОНТАКТНОГО КОНТРОЛЯ РЕЛЬЕФА ПОВЕРХНОСТИ ТРЕХМЕРНОГО ОБЪЕКТА | 2006 |
|
RU2316796C1 |
Изобретение относится к области измерительной техники и может быть использовано для визуализации профилей трехмерных объектов. Способ заключается в многократном формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности под разными ракурсами, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки путем сложения этих изображений и определении с помощью цифрового электронного вычислителя высоты рельефа поверхности контролируемого объекта по степени искажения структуры зондирующей подсветки, двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении. Модуляцией интенсивности управляют по одной координате, так что на поверхности контролируемого объекта создается структурированная подсветка в виде апериодической системы полос. Технический результат: повышение точности и достоверности контроля. 5 ил.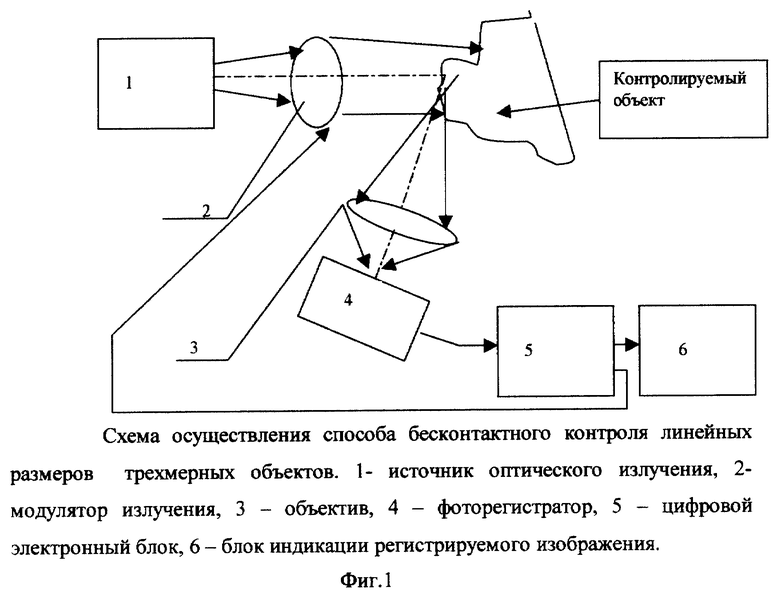
Способ бесконтактного контроля линейных размеров трехмерных объектов, заключающийся в формировании на поверхности контролируемого объекта зондирующей структурированной подсветки путем освещения поверхности контролируемого объекта пучком оптического излучения, пространственно модулированного по интенсивности, регистрации изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки и определении высоты рельефа поверхности контролируемого объекта по степени искажения изображения структуры зондирующей подсветки, двух других координат - по положению искажений структуры подсветки в зарегистрированном изображении, отличающийся тем, что формирование на поверхности контролируемого объекта зондирующей структурированной подсветки осуществляют многократно, каждый раз управляя модуляцией пучка оптического излучения по одной координате, создавая на поверхности контролируемого объекта изображение структурированной подсветки в виде апериодической совокупности полос, регистрацию изображения искаженной рельефом поверхности контролируемого объекта структуры зондирующей подсветки производят путем накопления суммарного изображения, а положение искажений структуры подсветки в зарегистрированном изображении определяют по расстоянию вдоль полосы и номеру полосы, формируемому логическим суммированием двоичных чисел, кодирующих положение полос в каждой из реализаций апериодической совокупности полос так, что единица соответствует наличию полосы, а нуль - отсутствию полосы.
| WO 00/70303, 23.11.2000 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| СПОСОБ ИЗМЕРЕНИЯ ФОРМЫ И ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОВЕРХНОСТИ ОБЪЕКТА | 1999 |
|
RU2148793C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЙ И ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ОБЪЕКТОВ СЛОЖНОЙ ФОРМЫ | 2000 |
|
RU2166748C1 |

