Изобретение относится к устройствам для ультразвукового или иного контроля трубопроводов большой протяженности, главным образом магистральных нефтепроводов, нефтепродуктопроводов, а также газопроводов путем пропуска внутри трубопровода инспекционного снаряда (снаряда-дефектоскопа) с установленными на нем соответствующими контрольными датчиками, средствами измерений, преобразования и записи данных измерений в накопитель цифровых данных в процессе пропуска и обработки полученных данных после выполнения пропуска с целью идентификации дефектов стенок трубопровода, определения параметров идентифицированных дефектов и их положения на трубопроводе.
Известно устройство для внутритрубного ультразвукового контроля [1]-[3], включающее в себя корпус с установленными ультразвуковыми датчиками и измерителями дистанции, а также средства обращения к ультразвуковым датчикам, средства преобразования и хранения данных измерений.
Устройство применяют путем пропуска внутри трубопровода, испускания в процессе пропуска зондирующих ультразвуковых импульсов и приема соответствующих отраженных ультразвуковых импульсов.
Известно также устройство для внутритрубного ультразвукового контроля [4] -[10] , включающее в себя корпус с установленными ультразвуковыми датчиками и измерителями дистанции, а также средства обращения к ультразвуковым датчикам, средства преобразования и хранения данных измерений.
Устройство применяют путем пропуска внутри трубопровода, испускания зондирующих ультразвуковых импульсов в процессе пропуска и приема соответствующих ультразвуковых импульсов, отраженных от внутренней и внешней стенок трубопровода, измерения времени хода указанных импульсов.
Период следования зондирующих ультразвуковых импульсов и скорость инспекционного снаряда внутри трубопровода определяют продольную разрешающую способность дефектоскопа. При заданном периоде сканирования (периоде следования зондирующих импульсов) шаг сканирования зависит от скорости снаряда: увеличивается при росте скорости и уменьшается при уменьшении скорости инспекционного снаряда. Скорость снаряда в нефтепроводе и нефтепродуктопроводе может быть до 2 м/с (неустановившееся значение до 6 м/с), в газопроводе - до 10 м/с. В процессе пропуска скорость снаряда меняется, и для обеспечения продольной разрешающей способности, не большей максимально допустимой, период следования зондирующих импульсов выбирается исходя из максимальной скорости инспекционного снаряда, которая возможна при обследовании конкретного трубопровода.
В результате изменения скорости снаряда в процессе его пропуска на участках замедления снаряда при заданном периоде следования зондирующих импульсов происходит избыточное сканирование, которое приводит к увеличению объема измеренных данных на единицу длины трубопровода и соответственно нерациональному использованию накопителя данных.
В заявленном устройстве выполняется динамическое сканирование, при котором частота обращения к датчикам (опроса, запуска датчиков) зависит от скорости снаряда в каждый момент времени.
Прототипом заявленного устройства является устройство для внутритрубного контроля трубопроводов [11] , включающее в себя корпус с установленными контрольными датчиками и измерителями дистанции, средства обращения к ультразвуковым датчикам, средства преобразования и хранения данных измерений.
Устройство применяют путем пропуска внутри трубопровода, испускания в процессе пропуска зондирующих ультразвуковых импульсов и приема отраженных импульсов, соответствующих указанным зондирующим импульсам, обработки данных измерений, при этом период следования ультразвуковых импульсов устанавливают как функцию скорости снаряда внутри трубопровода, и который задается вращением зондовой головки.
Недостатком такого устройства является то, что кратковременное проскальзывание зондовой головки (или колеса одометра), характерное при контроле нефтепроводов, нефтепродуктопроводов и других трубопроводов с маслянистыми составляющими в транспортируемом продукте, приводит к пропуску участков трубопровода из-за отсутствия зондирующих импульсов при отсутствии вращения головки (колеса одометра). Кроме того, описанное устройство не может быть использовано для контроля трубопроводов большой протяженности из-за неавтономности зондирующего устройства.
Устройство применяют путем пропуска внутри трубопровода, периодического обращения к контрольным датчикам, измерения пройденной дистанции с помощью нескольких измерителей дистанции, приема от каждого измерителя дистанции импульсов, число которых прямо пропорционально измеренной измерителем дистанции.
К основному недостатку указанного устройства относится то, что на участках замедления снаряда при заданном периоде следования зондирующих импульсов происходит избыточное сканирование, которое приводит к увеличению объема измеренных данных на единицу длины трубопровода и соответственно нерациональному использованию накопителя данных.
Заявленное устройство для внутритрубного контроля трубопроводов, пропускаемое внутри обследуемого трубопровода, также включает в себя корпус с установленными контрольными датчиками и измерителями дистанции, средства обращения к контрольным датчикам, средства преобразования и хранения данных измерений.
Заявленное устройство отличается от прототипа тем, что средства преобразования данных включают в себя тактовый генератор, счетчики, схему сравнения данных, схему формирования импульса обращения к контрольным датчикам, счетные входы счетчиков подключены к выходу тактового генератора, управляющие входы счетчиков подключены к выходам соответствующих измерителей дистанции, выходы данных счетчиков подключены к входам данных схемы сравнения данных, выход схемы сравнения данных подключен к одному из входов схемы формирования импульса обращения к контрольным датчикам.
Основной технический результат, достигаемый в результате реализации заявленного изобретения, состоит в том, что устройство позволяет избежать переполнения накопителей данных при замедленном движении снаряда или его временном застревании в трубопроводе, при этом полностью исключить потери данных на участках трубопроводов, протяженность которых больше разрешения снаряда-дефектоскопа в направлении оси трубопровода, исключая при этом ошибки в оценке скорости снаряда при сбое (например, проскальзывании или заклинивании) одного из одометров.
В одном из вариантов реализации заявленного устройства схема формирования импульса обращения к контрольным датчикам включает в себя вторую схему сравнения данных с выставленным на одном из входов данных опорным значением данных, выход данных первой указанной схемы сравнения данных подключен ко второму входу данных второй схемы сравнения данных, выход второй схемы сравнения подключен к средствам обращения к контрольным датчикам.
В другом варианте заявленного устройства схема формирования импульса обращения к контрольным датчикам включает в себя вторую схему сравнения данных, счетчик времени обращения к контрольным датчикам, выход данных первой указанной схемы сравнения данных подключен к одному из входов данных второй схемы сравнения, логический выход второй схемы сравнения подключен к средствам обращения к контрольным датчикам, выход тактового генератора подключен к счетному входу счетчика времени после обращения к контрольным датчикам, выход данных указанного счетчика подключен ко второму входу данных второй схемы сравнения, управляющий вход сброса указанного счетчика подключен к управляющему выходу второй схемы сравнения.
В наиболее предпочтительном варианте исполнения заявленного устройства, объединяющем предыдущие два варианта, схема формирования импульса обращения к контрольным датчикам включает в себя вторую схему сравнения данных с выставленным на одном из входов данных опорным значением данных, третью схему сравнения данных, счетчик времени после обращения к контрольным датчикам, выход данных первой указанной схемы сравнения данных подключен ко второму входу данных второй схемы сравнения данных, выход данных второй схемы сравнения подключен к одному из входов данных третьей схемы сравнения, логический выход третьей схемы сравнения подключен к средствам обращения к контрольным датчикам, выход тактового генератора подключен к счетному входу счетчика времени обращения к контрольным датчикам, выход данных указанного счетчика подключен ко второму входу данных третьей схемы сравнения, управляющий вход сброса указанного счетчика подключен к управляющему выходу третьей схемы сравнения.
Третья схема сравнения данных с предустановленным значением позволяет выполнять проверку условия, состоящего в том, что скорость снаряда составляет не менее минимального заранее заданного значения (0,01-0,2 м/с) и не превышает максимальное заранее заданное значение (1-2 м/с) путем проверки условия, состоящего в том, что указанный ранее минимальный промежуток времени составляет не менее минимального заранее заданного значения (0,5-7,0 мс) и не более максимального заранее заданного значения (20-140 мс); и при невыполнении указанных условий обращаться к датчикам с заданным периодом. Реализация указанных действий позволяет избежать искажения данных из-за перегрузки аппаратуры по скорости обработки данных при скорости снаряда, превышающей допустимую, а также избежать потери данных о состоянии трубы в случае отказа измерителей дистанции, например, в результате ударных и вибрационных нагрузок на снаряд.
Третья схема сравнения данных позволяет также выполнять проверку условия, состоящего в том, что найденный минимальный промежуток времени составляет не менее времени, прошедшего после последнего обращения к контрольному датчику, что позволяет учитывать те случаи, когда прошедшее после последнего обращения к датчику время уже превысило найденное значение интервала времени, и произвести запуск через найденный интервал только при выполнении условия, а при его невыполнении произвести обращение к контрольному датчику немедленно.
В развитие изобретения схема формирования импульса обращения к контрольным датчикам включает в себя регистр, выход регистра подключен к входу данных второй схемы сравнения, соответствующему опорному значению данных, вход регистра подключен к средствам преобразования и хранения данных измерений.
Поскольку обработка импульсов дистанции занимает некоторое время в зависимости от используемого аппаратного обеспечения, а параметры измерителя дистанции могут изменяться с течением времени или по мере движения в трубопроводе (например, может уменьшаться эффективный диаметр колес одометров), целесообразна реализация, при которой указанный интервал времени есть линейная функция найденного минимального промежутка времени и не превышает найденный минимальный промежуток времени, поэтому схема формирования импульса обращения к контрольным датчикам включает в себя управляемую схему изменения входного значения, управляющий вход указанной схемы изменения подключен к модулям преобразования цифровых данных, выход данных первой схемы сравнения подключен через указанную схему изменения к входу данных второй схемы сравнения; в другом варианте реализации выход данных второй схемы сравнения подключен через указанную схему изменения к входу данных третьей схемы сравнения.
Такая функция может учитывать эмпирически найденное изменение параметров, например, если каждому найденному минимальному промежутку времени соответствует интервал времени, меньший указанного промежутка, осуществляя, тем самым, сканирование трубопровода с разрешением, несколько меньшим (лучшим) с учетом некоторого запаса по разрешению.
В одном из исполнений указанная схема изменения входного значения выполнена в виде регистра сдвига.
Выходы данных счетчиков подключены к входам данных схемы сравнения данных через соответствующие регистры, выходы измерителей дистанции подключены к управляющим входам соответствующих регистров.
Выходы признака переполнения счетчиков подключены к средствам преобразования и хранения данных измерений.
Измерители дистанции выполнены в виде одометров, генерирующих импульсы, число которых пропорциональной измеренной одометром дистанции, дистанция, соответствующая двум соседним импульсам от одного одометра, составляет 1-5 мм.
Большее значение дистанции, соответствующей соседним импульсам дистанции неприемлемо, поскольку это ограничит разрешение вдоль трубопровода, значение менее 1 мм практически неэффективно из-за избыточности информации о дистанции при необходимом на практике разрешении вдоль трубопровода 3-5 мм, кроме того, при меньшей дистанции, соответствующей интервалу между соседними импульсами дистанции, проявляются вибрационные эффекты, из-за которых моментальные значения скорости снаряда существенно отличаются от средних значений на дистанции, равной продольному разрешению (3-5 мм).
Заявленная аппаратная реализация обработки данных о пройденной дистанции позволяет корректировать режим запуска после измерения каждого значения пройденной дистанции.
Средства обращения к контрольным датчикам включают в себя мультиплексор, управляющий вход которого подключен к указанному ранее управляющему выходу схемы сравнения данных, входы и/или выходы мультиплексора подключены к контрольным датчикам, что позволяет выполнять обращение к группе контрольных датчиков последовательно и, тем самым, использовать меньшее число каналов электронных трактов.
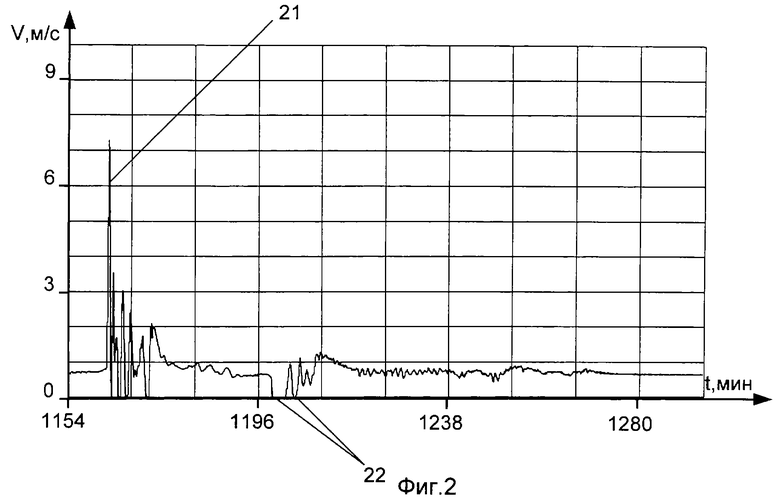
На фиг. 1 изображен внутритрубный ультразвуковой дефектоскоп в одном из конструктивных исполнений;
на фиг.2 изображена зависимость скорости снаряда внутри трубопровода от времени его движения для некоторого участка обследованного трубопровода;
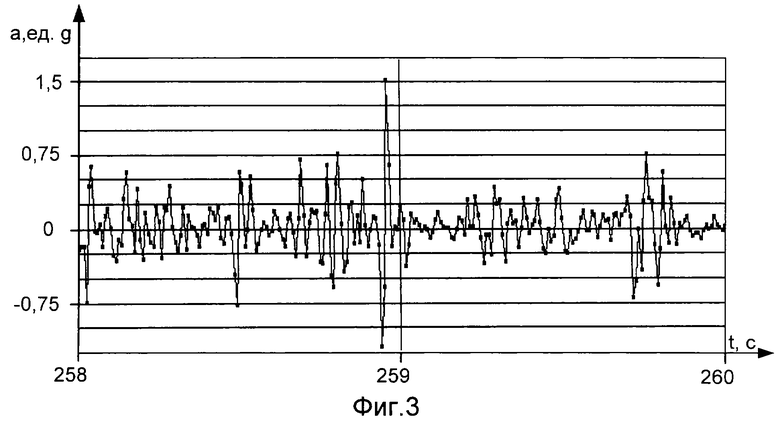
на фиг.3 изображена зависимость продольного линейного ускорения снаряда внутри трубопровода от времени его движения для некоторого участка обследованного трубопровода;
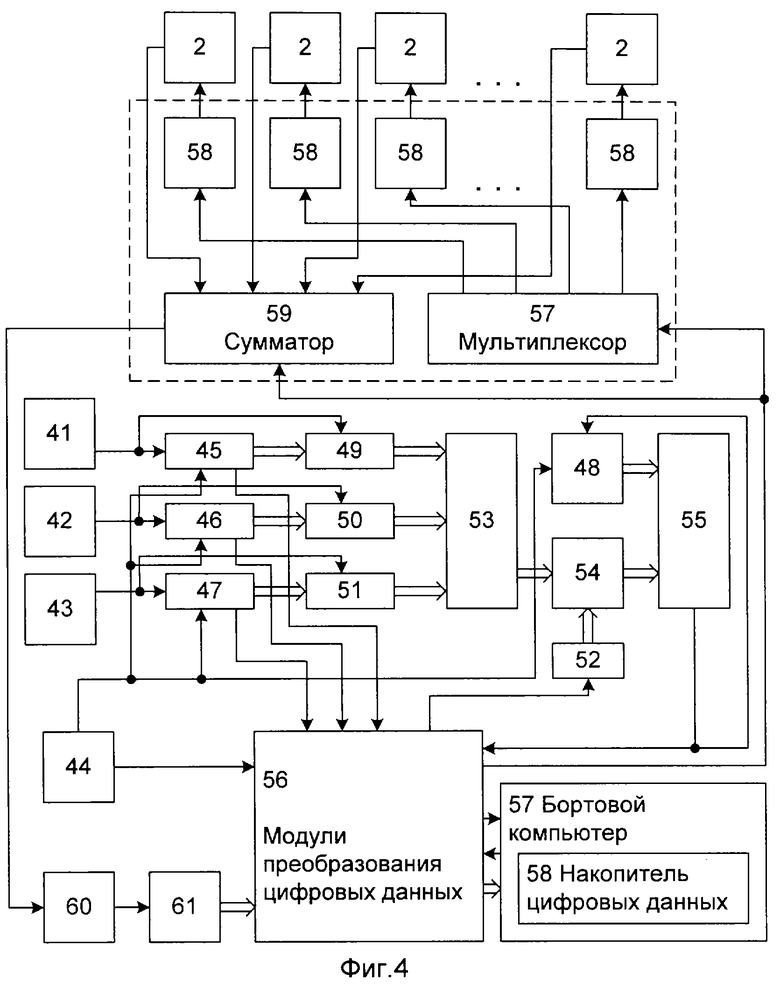
на фиг.4 изображена схема преобразования одометрических данных, запуска и опроса ультразвуковых датчиков при ультразвуковом контроле стенки трубопровода.
В результате решения задачи повышения достоверности внутритрубного контроля магистральных трубопроводов были разработаны и изготовлены внутритрубные инспекционные снаряды (ультразвуковые, магнитные дефектоскопы, профилемеры) для обследования нефтепроводов, газопроводов, конденсатопроводов, нефтепродуктопроводов номинальным диаметром от 10" до 56". Изготовленные в предпочтительном исполнении инспекционные снаряды выдерживают давление среды до 80 атм, имеют проходимость около 85% номинального диаметра трубопровода, работают при температурах перекачиваемой среды от 0 до 70oС, минимальный проходимый радиус поворота около 1,5 диаметра трубопровода. В снарядах реализованы виды взрывозащиты "Взрывонепроницаемая оболочка", "Искробезопасная электрическая цепь", "Специальный вид взрывозащиты".
На фиг. 1 изображен внутритрубный инспекционный снаряд для ультразвукового обследования трубопровода диаметром 38"-56" с толщиной стенки 4-30 мм в одном из конструктивных исполнений, который включает в себя: корпус 1, образующий взрывонепроницаемую оболочку, в которой располагается источник питания и электронная аппаратура для измерений, обработки и хранения получаемых данных измерений на основе бортового компьютера, управляющего работой инспекционного снаряда в процессе его движения внутри трубопровода. В качестве источника питания устанавливаются аккумуляторные батареи или батареи гальванических элементов общей емкостью до 1000 А•ч.
В хвостовой части снаряда установлены ультразвуковые датчики 2, попеременно излучающие и принимающие ультразвуковые импульсы. Установленные на корпусе снаряда полиуретановые манжеты 3 обеспечивают центровку снаряда внутри трубопровода и продвижение снаряда потоком перекачиваемой по трубопроводу среды. Колеса установленных на корпусе дефектоскопа одометров 4 прижимаются к внутренней стенке трубопровода. При движении снаряда одометры генерируют импульсы, число которых пропорционально измеренной одометром дистанции, импульсы от одометров проходят обработку в схеме, обеспечивающей согласование времени запуска ультразвуковых датчиков с показаниями одометров, информация о длине пройденного пути, измеренная одометрами, записывается в накопитель бортового компьютера и позволяет после выполнения диагностического пропуска и обработки накопленных данных определить положение дефектов на трубопроводе и соответственно место последующей экскавации и ремонта трубопровода.
Инспекционный снаряд помещают в трубопровод и включают перекачку продукта (нефти, нефтепродукта) по трубопроводу, и снаряд приходит в движение.
При решении задачи ультразвуковой толщинометрии ультразвуковые импульсы испускают перпендикулярно внутренней поверхности трубопровода. Указанные импульсы частично отражаются от внутренней стенки трубопровода, от внешней стенки трубопровода или от области дефекта, например, расслоения металла в стенке трубы. Частично ультразвуковые импульсы проходят через границу сред, образуемую внешней стенкой трубопровода.
После испускания ультразвуковых импульсов ультразвуковые датчики переключаются в режим приема отраженных импульсов и принимают импульсы, отраженные от внутренней стенки, импульсы, отраженные от внешней стенки трубы, либо импульсы, отраженные от указанной области дефекта стенки.
С целью обнаружения трещин в стенке трубопровода ультразвуковые импульсы испускают под углом около 17-19o к нормали внутренней поверхности трубопровода. Указанные импульсы частично отражаются от внутренней стенки трубопровода, от внешней стенки трубопровода или от трещиноподобного дефекта. Частично ультразвуковые импульсы проходят через границы сред или отражаются, ослабляя, тем самым, полезный отраженный импульс.
После испускания ультразвуковых импульсов ультразвуковые датчики переключаются в режим приема отраженных импульсов и принимают импульсы, отраженные от трещиноподобного дефекта.
Полученные цифровые данные о временных промежутках, соответствующих времени хода ультразвуковых импульсов, и амплитудах импульсов преобразуют и записывают в накопитель цифровых данных бортового компьютера.
При магнитном контроле стенки трубопровода намагничивают некоторую область стенки трубопровода и с помощью датчиков магнитного поля измеряют составляющие магнитного поля вблизи намагниченной области стенки трубопровода. Измерение магнитного поля производят путем периодического обращения к датчикам магнитного поля (путем опроса датчиков). Наличие трещин или дефектов, связанных с потерей металла (коррозия, задиры), приводит к изменению величины и характера распределения магнитной индукции.
Аналогичным образом производят внутритрубный контроль путем периодического обращения к датчикам иного типа (магнитооптическим, оптическим, электромагнитно-акустическим, датчикам профиля сечения трубопровода, например, путем периодического обращения к датчикам угла поворота рычагов, прижимаемых к внутренней поверхности трубопровода, и иным датчикам).
Фиг. 2 иллюстрирует характерную зависимость скорости снаряда V внутри трубопровода, выраженную в метрах в секунду, от времени движения снаряда t, выраженного в минутах. При скорости, с которой снаряд двигался большую часть времени (около 0,8 м/с), период следования зондирующих импульсов должен быть не более 4,1 мс. При скорости снаряда по позиции 21 около 7,2 м/с и максимальном разрешении вдоль трубы 3,3 мм период следования зондирующих импульсов должен быть не более 0,46 мс. При неизменном периоде следования зондирующих импульсов 4,1 мс всплеск по скорости 21 привел бы к потере данных на участке более 50 м. А выполнение внутритрубного контроля с периодом следования импульсов 0,46 мс обеспечило бы отсутствие потерь данных, но объем измеренных данных при этом был бы в 8-9 раз больше при разрешении на основной части трубопровода 0,4 мм, в то же число раз меньшем, чем достаточно для идентификации дефектов и определения их параметров при последующей обработке данных (тем более при сильном затормаживании снаряда, показанном позицией 22).
Фиг.3 иллюстрирует характерную зависимость продольного линейного ускорения снаряда внутри трубопровода "а", выраженную в единицах g (ускорения свободного падения), от времени t его движения, выраженного в секундах.
Для оптимизации периода сканирования (излучения зондирующих импульсов) реализована схема обработки данных от одометров 41, 42, 43 фиг.4, реализованная на следующих элементах фиг.4: тактовый генератор 44, счетчики 45, 46, 47, 48, регистры 49, 50, 51, 52, схемы сравнения данных 53, 54, 55. Скорость снаряда определяют с помощью трех одометров 41, 42, 43: принимают нормированные импульсы от одометров, число импульсов от одометра прямо пропорционально измеренной одометром дистанции, импульсы подают на управляющие входы счетчиков 45, 46, 47, на счетные входы которых подают импульсы от тактового генератора 44. Выходы данных счетчиков 45, 46, 47 подключены к соответствующим входам регистров 49, 50, 51, выходы которых подключены к входам данных схемы сравнения данных 53. Импульсы от одометров подключены также к управляющим входам регистров 49, 50, 51, которые инициируют считывание новых значений данных из счетчиков 45, 46, 47, которые, таким образом, отсчитывают время (число тактовых импульсов). Схема 53 пропускает на выход минимальное из значений на входе. Это минимальное значение подают на вход схемы сравнения 54, на второй вход данных схемы 54 подают данные из регистра 52, на который, в свою очередь, значение подается из модулей преобразования цифровых данных 56. Схема 54 пропускает на выход наибольшее из двух значений на входе, значение в регистре 52 соответствует минимальному допустимому интервалу времени между запусками ультразвуковых датчиков. Если значение из схемы 53 больше значения из регистра 52, датчики запускают с интервалом из схемы 53, в противном случае - с фиксированным интервалом из 52. Значение из схемы 54 подают на один из входов схемы сравнения данных 55, на второй вход схемы 55 подают выход данных счетчика тактовых импульсов 48, на счетный вход которого подают тактовые импульсы с генератора тактовых импульсов 44. Схема сравнения 55 формирует на логическом выходе управляющее состояние (изменение состояния), если значение из счетчика 48 превышает значение из схемы 54. Логический выход схемы 55 подключен к входу сброса счетчика 48 и через модули преобразования цифровых данных 56 - к управляющему входу мультиплексора 57. Импульс с выхода схемы 55, таким образом, запускает ультразвуковой датчик, сбрасывает счетчик 48, который начинает отсчитывать интервал времени, через который будет произведен очередной запуск первого из группы датчика, и этот интервал равен значению с выхода схемы 54.
Последовательный запуск и опрос ультразвуковых датчиков 2, возбуждаемых генераторами 58, реализуется с помощью мультиплексора 57, обеспечивающего последовательный запуск генераторов 58 и сумматора 59, обеспечивающего последовательный опрос датчиков 2. Сигнал запуска датчика, поступающий на вход мультиплексора 57, последовательно инициирует генераторы 58, которые соответственно последовательно возбуждают ультразвуковые датчики 2. Сигнал (импульс) с датчиков 2 снимается через сумматор 59 на усилитель 60, с выхода которого импульс от датчика проходит аналого-цифровое преобразование амплитуд в аналого-цифровом преобразователе (АЦП) 61, оцифрованные амплитуды из АЦП 61 подаются в модули преобразования цифровых данных 56. Преобразованные в модуле 56 цифровые данные подают в бортовой компьютер 57, где данные записывают в накопитель цифровых данных 58, данные записывают в файлы с записью времени открытия и времени закрытия файла по таймеру.
После приема очередного одометрического импульса от какого-либо из одометров 41, 42, 43 для каждого одометра определяют промежуток времени между последними двумя одометрическими импульсами (соответствующие значения заносятся в регистры 49, 50, 51), с помощью схемы сравнения данных 53 определяют минимальный промежуток времени среди указанных промежутков времени, обращение к первому в последовательности ультразвуковому датчику 2 выполняют через найденный минимальный промежуток времени. С помощью счетчика 48 тактовых импульсов с тактового генератора 44 определяют время, прошедшее после последнего обращения к ультразвуковому датчику, с помощью схемы 55 выполняют проверку условия, состоящего в том, что найденный минимальный промежуток времени из схемы 53 составляет не менее указанного времени, указанный ранее интервал времени определяют (отсчитывают) при выполнении указанного условия, при невыполнении указанного условия на выходе схемы 55 изменяется состояние, и датчик запускается немедленно.
В изображенной на фиг.4 схеме значение из схемы 53 непосредственно поступает на вход данных схемы 54, а из схемы 54 - на вход данных схемы 55, и, таким образом, реализуется алгоритм, при котором интервал времени, через который будет произведен очередной запуск датчика, совпадает с найденным минимальным промежутком времени.
Для реализации алгоритма, при котором интервал времени есть функция (линейная) найденного минимального промежутка времени, данные с выхода данных схемы 53 проходят на вход схемы 54 через управляемую схему изменения входного значения, и/или данные с выхода данных схемы 54 проходят на вход схемы 55 через управляемую схему изменения входного значения, управляющий вход указанной схемы изменения подключен к модулям преобразования цифровых данных, откуда задается величина или функция изменения входного значения.
Одновременно запускают несколько ультразвуковых датчиков с указанным в ранее интервалом времени. Промежуток времени между соседними одометрическими импульсами соответствует участку измеренной одометром дистанции около 3 мм. Определяют скорость снаряда внутри трубопровода, выполняют проверку условия, состоящего в том, что скорость снаряда составляет не менее 0,1 м/с и не более 1,5 м/с, путем выполнения проверки условия, состоящего в том, что указанный ранее минимальный промежуток времени составляет не менее минимального заранее заданного значения и не более максимального заранее заданного значения.
Если скорость снаряда меньше 0,1 м/с (указанный минимальный промежуток времени больше 30 мс), то датчики запускают с периодом около 30 мс. Если скорость снаряда больше 1,5 м/с (указанный минимальный промежуток времени меньше 2 мс), то датчики запускают с периодом около 2 мс.
В соответствии с алгоритмом, реализуемым программой бортового компьютера, оцифрованные измеренные данные от нескольких датчиков объединяются в кадры данных, в кадр данных заносятся параметры принятых импульсов, соответствующих зондирующим импульсам для каждого ультразвукового датчика, а также время, однозначно связанное с временем запуска указанных зондирующих импульсов. Указанные параметры принятых импульсов включают в себя оцифрованные амплитудные значения импульсов и времени после запуска соответствующего зондирующего импульса для каждого амплитудного значения. В предпочтительном варианте указанные параметры принятых импульсов включают в себя оцифрованные амплитудные значения в максимуме импульсов и соответствующее максимуму время после запуска соответствующего зондирующего импульса. Кадр данных включает в себя указанные параметры принятых импульсов, соответствующих 64 зондирующим импульсам для каждого ультразвукового датчика.
Оцифрованные данные записывают в накопитель цифровых данных путем открытия файла, записи времени открытия файла, записи в файл 20 указанных кадров данных, записи времени закрытия файла, закрытия файла, указанное время определяют по часам компьютера, управляющего записью данных в накопитель, указанное ранее время определяют по таймеру, установленному в инспекционном снаряде, время по часам компьютера и время по таймеру синхронизируют между собой и с временем по таймеру, установленному вне инспекционного снаряда перед пропуском инспекционного снаряда и после пропуска инспекционного снаряда.
По завершении контроля заданного участка трубопровода снаряд-дефектоскоп извлекают из трубопровода и переносят накопленные в процессе диагностического пропуска данные на компьютер вне снаряда.
Последующий анализ записанных данных позволяет идентифицировать дефекты стенки трубопровода и определить их положение на трубопроводе с целью последующего ремонта дефектных участков трубопровода.
Источники информации
1. Патент RU 2018817, MПK G 01 N 29/10, дата публикации 30.08.94.
2. Патент RU 2042946, МПК G 01 N 29/04, дата публикации 27.08.95.
3. Патент RU 2108569, МПК G 01 N 29/04, дата публикации 10.04.98.
4. Патент US 4162635, МПК G 01 N 29/04, дата публикации 31.07.79.
5. Международная заявка WО 96/13720, MПK G 01 N 29/10, дата публикации 09.05.96 (патентные документы-аналоги: US 5587534, СА 2179902, ЕР 0741866, AU 4234596, JP 3058352).
6. Европейский патент ЕР 0304053, MПK G 01 N 29/00, дата публикации 15.03.95 (патентные документы-аналоги: US 4964059, СА 1292306, NO 304398, JP 1050903).
7. Европейский патент ЕР 0271670, МПК G 01 N 29/04, дата публикации 13.12.95 (патентные документы-аналоги: US 4909091, СА 1303722, DE 3638936, NО 302322, JP 63221240).
8. Европейский патент ЕР 0616692, MПK G 01 N 29/10, дата публикации 28.09.94 (патентные документы-аналоги: WО 9312420, US 5635645, СА 2125565, DE 4141123, JP 2695702).
9. Европейский патент ЕР 0561867, МПК G 01 N 29/04, дата публикации 26.10.94 (патентные документы-аналоги: WО 9210746, US 5497661, СА 2098480, DE 4040190).
10. Патент US 5460046, МПК G 01 N 29/24, дата публикации 24.10.95 (патентные документы-аналоги: ЕР 0684446, JP 7318336).
11. Патент US 5062300, МПК G 01 N 29/06, дата публикации 05.11.91 (патентные документы-аналоги: СА 1301299, ЕР 0318387, DE 3864497, FR 2623626, JP 2002923).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВНУТРИТРУБНОГО КОНТРОЛЯ ТРУБОПРОВОДОВ С ДИНАМИЧЕСКИМ РЕЖИМОМ СКАНИРОВАНИЯ | 2002 |
|
RU2205396C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД | 2002 |
|
RU2205397C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2194274C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2002 |
|
RU2205395C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОЙ УЛЬТРАЗВУКОВОЙ ТОЛЩИНОМЕТРИИ | 2001 |
|
RU2188413C1 |
| СПОСОБ ВНУТРИТРУБНОЙ УЛЬТРАЗВУКОВОЙ ДЕФЕКТОСКОПИИ | 2001 |
|
RU2182331C1 |
| СПОСОБ ОБСЛЕДОВАНИЯ ПРОФИЛЯ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2001 |
|
RU2200301C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1999 |
|
RU2157514C1 |
| УСТРОЙСТВО ДЛЯ ИНДИКАЦИИ ПОЛОЖЕНИЯ ВНУТРИТРУБНЫХ ОБЪЕКТОВ И СПОСОБ ЕГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2206815C1 |
Изобретение относится к устройствам для ультразвукового или иного контроля трубопроводов большой протяженности и может быть использовано для обнаружения и идентификации дефектов магистральных нефтепроводов и газопроводов. Устройство позволяет избежать переполнения накопителей данных при замедленном движении снаряда, при этом полностью исключить потери данных на участках трубопроводов, протяженность которых больше разрешения снаряда-дефектоскопа в направлении оси трубопровода, исключая при этом ошибки в оценке скорости снаряда при сбое в работе измерителя дистанции. Устройство включает корпус с установленными контрольными датчиками и измерителями дистанции, средства обращения к контрольным датчикам, средства преобразования и хранения данных измерений. Средства преобразования данных включают в себя тактовый генератор, счетчики, схему сравнения данных, схему формирования импульса обращения к контрольным датчикам, счетные входы счетчиков подключены к выходу тактового генератора, управляющие входы счетчиков - к выходам соответствующих измерителей дистанции, выходы данных счетчиков - к входам данных схемы сравнения данных, выход схемы сравнения данных - к одному из входов схемы формирования импульса обращения к контрольным датчикам. 9 з.п. ф-лы, 4 ил.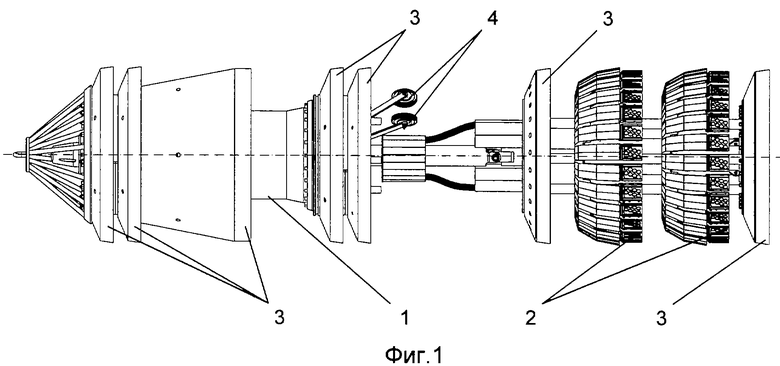
| US 5062300, 05.11.1991 | |||
| СПОСОБ ИССЛЕДОВАНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2089896C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТРУБОПРОВОДОВ | 1999 |
|
RU2149367C1 |
| УСТРОЙСТВО ДЛЯ УЛЬТРАЗВУКОВОГО КОНТРОЛЯ ТРУБОПРОВОДОВ | 1992 |
|
RU2018817C1 |
| US 4522063, 11.06.1985 | |||
| US 3810384, 14.05.1974. | |||

