Изобретение относится к способам наблюдения за состоянием трубопроводов большой протяженности, а именно для определения профиля нефтегазопродуктопроводов путем пропуска внутри обследуемого трубопровода диагностического снаряда, записи данных профиля трубопровода в бортовом компьютере снаряда и определения после выполнения пропуска по накопленным данным параметров профиля трубопровода.
Известны способ измерения формы цилиндрической поверхности, описанный в патенте США US 4186494, МПК: G 01 В 7/12, дата публикации 05.02.80 (патентные документы - аналоги: DE 2810552, FR 2383426, GB 1585443), а также способ измерения внутренних размеров труб, описанный в патенте США US 5299359, МПК: G 01 В 7/12, дата публикации 05.04.94 (патентный документ - аналог: ЕР 0307383).
Способ выполняют путем пропуска внутри трубопровода снаряда с множеством чувствительных рычагов, установленных на корпусе снаряда по периметру в сечении трубопровода, прижимаемых пружинами к внутренней поверхности трубопровода и скользящих по указанной поверхности. Каждый из чувствительных рычагов кинематически связан с соответствующим ему датчиком перемещения. Сигналы с датчиков перемещения, соответствующие изменению положения чувствительных рычагов, обрабатывают средствами обработки, установленными в корпусе снаряда, и передают на средства хранения данных, находящиеся вне корпуса снаряда.
Необходимость связи снаряда со средствами хранения измеренных данных ограничивает длину трубопровода, которая может быть проконтролирована, и делает невозможным внутритрубный контроль магистральных трубопроводов.
Известен способ выявления деформированных участков труб и трубопроводов, описанный в а. с. СССР SU 1768941, МПК: G 01 В 7/12, дата публикации 15.10.92.
Способ реализуют с помощью множества чувствительных рычагов, установленных на корпусе снаряда вокруг главной оси корпуса, прижимаемых пружинами к внутренней поверхности трубопровода и скользящих по указанной поверхности.
Рычаги кинематически связаны с двумя дисками, которые в свою очередь кинематически связаны с датчиками взаимного перемещения дисков. Отклонение любого из чувствительных рычагов приводит к изменению расстояния между дисками, которое измеряют с помощью реостатных датчиков. Измеряя расстояние между дисками, определяют наличие деформации в сечении трубопровода.
Однако по данным о расстоянии между дисками не может быть определена ориентация дефекта в сечении трубопровода и не может быть идентифицировано различие между деформацией трубы и наличием, например, вваренного в трубу предмета.
Известен способ обследования пространственного профиля трубопроводов (патент США US 3882606, МПК: G 01 B 7/28, дата публикации 13.05.75, патентные документы - аналоги: СА 1006692, GB 1435650, NL 7406497) путем пропуска внутри обследуемого трубопровода инспекционного снаряда с установленными на нем соответствующими измерительными средствами в виде множества одометров, установленных на корпусе диагностического снаряда в виде нескольких поясов. Показания одометров записывают в накопитель. После выполнения пропуска по накопленным данным определяют пространственный профиль трубопровода.
В процессе измерений оцифрованные данные от каждого одометра записывают в соответствующий регистр. Из регистров данные записывают в пленочный накопитель цифровых данных.
При обследовании нефтепроводов и нефтепродуктопроводов, а также при прохождении снарядом дефектов геометрии внутреннего сечения трубопровода, например загнутых фрагментов подкладных колец и фрагментов вваренных в сварной шов сварных электродов, имеет место отсутствие вращения некоторых колес одометров, что приводит к неадекватным показаниям одометров.
Известен способ контроля внутренней геометрии трубопровода, описанный в патенте США US 4443948, МПК: G 01 В 7/12, дата публикации 24.04.84 (патентные документы - аналоги: AU 7598181, СА 1166002, ЕР 0051912, GB 2088059, JP 57088310, NO 812763). Способ выполняют путем пропуска внутри трубопровода снаряда с множеством чувствительных рычагов, установленных на корпусе снаряда по периметру в сечении трубопровода, прижимаемых пружинами к внутренней поверхности трубопровода и скользящих по указанной поверхности. Каждый из чувствительных рычагов кинематически связан с соответствующим ему датчиком угла поворота. Сигналы с датчиков угла поворота, соответствующие изменению положения чувствительных рычагов, подают на входы пары мультиплексоров, переключаемых таймером. Пару сигналов с мультиплексоров, соответствующих диаметрально противоположным рычагам, суммируют, усиливают и подают на вход компаратора. При превышении заранее заданного порога, соответствующего пороговому превышению отклонения диаметра от номинального значения, в накопитель записывают условный код события превышения порогового отклонения диаметра. Кроме этого, сигналы с датчиков угла поворота, соответствующие изменению положения чувствительных рычагов, подают на входы мультиплексора, переключаемого таймером, снятые с выхода мультиплексора сигналы оцифровывают и непосредственно записывают в накопитель цифровых данных.
Известен также способ обследования профиля трубопроводов (прототип для обоих вариантов изобретения), описанный в Международной заявке WO 96/13699, МПК: G 01 В 7/28, дата публикации 09.05.96. Способ выполняют путем пропуска внутри трубопровода снаряда с установленными на нем датчиками для измерений профиля трубопровода (в виде множества чувствительных рычагов), средствами обработки и хранения данных измерений, путем выполнения измерений с помощью указанных датчиков в процессе пропуска, оцифровывания данных измерений и записи в накопитель цифровых данных, определения после выполнения пропуска по накопленным данным параметров профиля трубопровода.
На снаряде установлен также датчик длины пройденного пути в виде одометра.
Использование небольшого числа рычагов в описанных способах позволяет снизить объем данных для записи в автономном накопителе данных, однако зазоры между рычагами в описанном изобретении превышают ширину рычагов в месте контакта рычагов с внутренней поверхностью трубопровода в его сечении, в результате чего многие локальные дефекты, размер которых в плоскости сечения трубы меньше величины зазора между рычагами, не регистрируются. Использование же большого числа рычагов, достаточного для идентификации дефектов профиля сечения трубопровода, увеличивает объем записываемых данных.
Выполнение измерений с точностью, достаточной для обнаружения напряженно-деформированных состояний трубопроводов и выполнения соответствующих расчетов на прочность, требует использования накопителей большой емкости.
Использование накопителей большой емкости на основе магнитной ленты, магнитных, оптических и магнитооптических дисков обусловливает проблемы, связанные с чувствительностью накопителей с движущимися частями к вибрациям и ударным нагрузкам, возникающим при внутритрубном обследовании трубопроводов, особенно при обследовании газопроводов с большим сроком службы, строительство которых велось без учета возможности проведения внутритрубной инспекции.
Использование твердотельных накопителей емкостью несколько Гбайт на твердотельной памяти (например, RAM-дисков) позволяет решить проблемы вибраций и ударных нагрузок, однако стоимость таких накопителей зачастую превышает стоимость всего остального электронного оборудования инспекционного снаряда. Кроме того, использование RAM-дисков требует использования источника питания большой емкости.
Использование стандартных средств сжатия объема данных, записанных в файлы, независимо от физической природы данных сопровождается несколькими проходами данных. При небольшом количестве проходов сжатие не эффективно. Использование архивирующих алгоритмов типа zip, arj, rar и других подобных эффективных средств сжатия сопровождается большим количеством проходов сжимаемых данных, при этом количество проходов и, соответственно, время архивации зависит от типа и характера данных и не ограничено сверху. По этой причине время обработки данных может превышать зарезервированное и приводить к сбоям обработки последующих данных и, соответственно, к потере части данных.
Заявленный способ обследования профиля трубопроводов в первом варианте выполняют путем пропуска внутри трубопровода снаряда с установленными на нем датчиками для измерений профиля трубопровода, средствами обработки и хранения данных измерений, путем выполнения измерений с помощью указанных датчиков в процессе пропуска, оцифровывания данных измерений и записи в накопитель цифровых данных, определения после выполнения пропуска по накопленным данным параметров профиля трубопровода.
В отличие от способа по прототипу в первом варианте заявленного способа в процессе пропуска выполняют цифровое преобразование указанных данных измерений, в процессе цифрового преобразования данных выделяют последовательности показаний каждого из датчиков профиля трубопровода, для каждой выделенной последовательности данных выполняют преобразование сжатия данных в последовательности и запись преобразованных данных в накопитель.
В развитие первого варианта изобретения в процессе преобразования сжатия для значений последовательности, исключая, по крайней мере, первое значение в последовательности при заранее определенном правиле нумерации значений последовательности, вычисляют приращение значения по сравнению с предыдущим значением в последовательности в соответствии с указанным правилом нумерации, формируют преобразованную последовательность, в которой указанное первое значение совпадает с исходным, другие значения исходной последовательности заменяют на соответствующие приращения значений.
В одном из подвариантов первого варианта изобретения в процессе преобразования сжатия указанным выше способом для каждой исходной последовательности значений вычисляют среднее значение в последовательности, для значений исходной последовательности, исключая, по крайней мере, одно значение в последовательности, вычисляют приращение значения по сравнению с указанным средним значением.
В полученной последовательности приращений и в полученной последовательности приращений от среднего определяют максимальное приращение из указанных ранее приращений и максимальное приращение от среднего из указанных ранее приращений от среднего соответственно, определяют выполнение условия, состоящего в том, что указанное максимальное приращение меньше указанного максимального приращения от среднего, указанное ранее формирование преобразованной последовательности выполняют после получения положительного результата выполнения указанного условия.
В другом подварианте первого варианта изобретения в процессе преобразования сжатия для каждой последовательности вычисляют среднее значение в последовательности, для значений последовательности, исключая, по крайней мере, одно значение в последовательности, вычисляют приращение значения по сравнению с указанным средним значением, формируют преобразованную последовательность, в которой значение в последовательности, соответствующее указанному исключенному значению, заменяют на указанное среднее значение в последовательности, другие значения исходной последовательности заменяют на соответствующие приращения от среднего. В процессе преобразования сжатия указанным способом для значений каждой исходной последовательности, исключая, по крайней мере, первое значение в исходной последовательности при заранее определенном правиле нумерации значений последовательности, вычисляют приращение значения по сравнению с предыдущим значением в последовательности в соответствии с указанным правилом нумерации.
В полученной во втором подварианте последовательности приращений от среднего и в полученной последовательности приращений определяют максимальное приращение от среднего из указанных ранее приращений от среднего и максимальное приращение из указанных ранее приращений соответственно, определяют выполнение условия, состоящего в том, что указанное максимальное приращение от среднего меньше указанного максимального приращения, указанное во втором подварианте формирование преобразованной последовательности выполняют после получения положительного результата выполнения указанного условия.
В дальнейшее развитие первого варианта изобретения замену значений преобразованной последовательности выполняют путем считывания первых n бит соответствующего вычисленного приращения и записи полученного n-битного приращения в указанную преобразованную последовательность.
Значение n составляет не менее разрядности j максимального из указанных ранее вычисленных приращений и не превышает разрядность значений исходной последовательности. Значение n не превышает значение j+2.
Заявленный способ обследования профиля трубопроводов во втором варианте выполняют путем пропуска внутри трубопровода снаряда с установленными на нем датчиками для измерений профиля трубопровода, датчиком длины пройденного пути, средствами обработки и хранения данных измерений, путем выполнения измерений с помощью указанных датчиков в процессе пропуска, оцифровывания данных измерений и записи в накопитель цифровых данных, определения после выполнения пропуска по накопленным данным параметров профиля трубопровода.
В отличие от способа по прототипу во втором варианте заявленного способа в процессе пропуска выполняют цифровое преобразование указанных данных измерений, в процессе цифрового преобразования данных выделяют показания датчиков, соответствующие изменению показаний датчика длины пройденного пути, не меньшему заранее определенного значения, выполняют преобразование сжатия выделенных данных и запись преобразованных данных вместе с показанием датчика длины пройденного пути в накопитель.
В развитие второго варианта изобретения в процессе преобразования данных показания датчиков выделяют в виде последовательностей показаний каждого датчика профиля трубопровода, в выделенной последовательности определяют минимальное и максимальное значения в последовательности и записывают указанные значения в преобразованный блок данных.
Для преобразования данных берут некоторую часть выделенных показаний датчиков.
Датчик длины пройденного пути выполнен в виде одометра, указанное заранее определенное значение составляет 0,2-10 см.
Основной технический результат, общий для обоих заявленных вариантов, достигаемый в результате реализации заявленного изобретения, - повышение точности измерения отклонения характеристик профиля трубопровода от их проектных значений и от измеренных в результате предыдущих обследований профиля трубопровода благодаря увеличению объема измеренных данных и, в то же время, уменьшению объема, занимаемого в накопителе записанными данными.
Механизм достижения указанного технического результата состоит в том, что используемые в заявленном способе обследования трубопроводов алгоритмы измерений, обработки и сохранения данных измерений с помощью датчиков профиля трубопровода позволяют структурировать оцифрованные данные по мере их накопления в зависимости от характера получаемых данных, что позволяет измерять параметры профиля с большей частотой и, соответственно, лучшим разрешением по длине и пространственным координатам трубопровода, не увеличивая при этом емкость накопителя, поскольку объем преобразованных описанным способом данных значительно меньше исходного.
Описанный алгоритм по первому варианту изобретения позволяет записывать данные с исходной разрядностью при прохождении снарядом большого числа участков малого радиуса или гофрированных участков труб, которое сопровождается значительным числом измеренных значений с большой разницей между соседними значениями за время накопления одного блока данных, и записывать данные с разрядностью, в несколько раз меньшей, при движении снаряда на ровных участках трубопроводов. Использование такого алгоритма наиболее эффективно при контроле магистральных трубопроводов.
Применение первого варианта заявленного способа особенно эффективно для цифрового преобразования данных от датчиков угловых скоростей и ускорений при характерной средней частоте записи измеряемых значений 100-150 Гц.
Применение второго варианта реализации заявленного способа особенно эффективно для предварительной обработки данных от датчиков угла поворота рычагов, чувствительных к профилю сечения трубопровода.
Реализация обоих вариантов заявленного способа при обследовании профиля трубопровода позволяет выполнять обследование любых типов трубопроводов без дополнительной перенастройки системы обработки данных.
Кроме того, это позволяет выполнять обследование трубопроводов, имеющих участки из труб разных типов, с разной степенью очистки, разной толщины стенки (соответственно, разного внутреннего диаметра при равном внешнем типовом диаметре), которое сопровождается изменением характера движения снаряда внутри трубопровода в зависимости от проходимого участка трубопровода, применяя в процессе пропуска оба алгоритма обработки данных.
В развитие обоих вариантов реализации заявленного способа:
в процессе пропуска выполняют измерения пространственного положения трубопровода и/или измерения профиля сечения трубопровода, а также измерения линейной скорости снаряда внутри трубопровода, частота опроса соответствующих датчиков для указанных измерений составляет 100-3000 Гц;
разрядность оцифрованных данных от датчиков профиля трубопровода не менее 12, средняя частота записи соответствующих значений в накопитель цифровых данных для каждого датчика составляет 70-300 Гц.
Опрос датчиков с частотой в указанном диапазоне позволяет выполнять измерения с достаточным разрешением по длине трубопровода и с применением одного канала АЦП достаточной разрядности (14-16), выпускаемых в настоящее время, для оцифровки данных от каждого датчика. Запись данных с частотой, большей верхней границы указанного диапазона (300 Гц), приводит к неоправданному увеличению объема накопителя цифровых данных, нижняя граница диапазона (70 Гц) определяется максимальной частотой изменения параметров навигации и профиля сечения (25-35 Гц) при движении снаряда, которая должна регистрироваться для адекватной интерпретации накопленных данных с учетом правила, что минимальная частота измерения записываемых данных должна быть, по крайней мере, в два раза выше максимальной измеряемой частоты изменения измеряемых значений.
В процессе измерений периодически формируют кадры данных, каждый из которых содержит оцифрованные данные от датчиков и индивидуальный цифровой код указанного кадра, кадры накапливают в виде блоков данных в буфере оперативного запоминающего устройства, в процессе цифрового преобразования данных последовательности данных считывают из указанного буфера. Число кадров в блоке данных составляет не менее 100 и не более 10000, объем буфера составляет от 8 Мбайт до 500 Мбайт.
При большем значении кадров в блоке (и большом объеме буфера) потеря блока данных из-за кратковременного сбоя аппаратуры приводит к потере недопустимых объемов данных, а, кроме того, эффективность уменьшения объема данных снижается (при использовании алгоритмов по первому варианту с вычислениями средних значений), поскольку средние значения для 10000 кадров в блоке, соответствующие 100-300 м трубопровода, становятся не различимы со средними значениями на общей протяженности обследуемого участка магистрального трубопровода 100-300 км.
Использование меньшего числа кадров в блоке (и меньшего объема буфера) снижает эффективность преобразования данных при прохождении снарядом прямолинейных участков трубопроводов без дефектов геометрии в сечении трубопровода из-за необходимости записи, по крайней мере, заголовков преобразованных блоков данных, и с уменьшением числа кадров в блоке количество блоков и, соответственно, число записей на единицу длины пути увеличивается.
Для цифрового преобразования берут каждый N-й кадр измеренных значений, значение N составляет от 5 до 100.
В процессе пропуска измеряют пройденную внутри трубопровода дистанцию с помощью одометра, каждый кадр данных включает в себя запись показаний счетчика одометрических импульсов от одометра, в начале цифрового преобразования данных вычисляют приращение показаний одометра путем вычисления разности между последним и первым по времени записи в блок данных значением в одометрической последовательности, определяют выполнение условия, состоящего в том, что указанное приращение показаний одометра больше заранее заданного значения, преобразование цифровых данных выполняют после получения положительного результата выполнения указанного условия. Указанное здесь заранее заданное значение составляет от 2 до 100.
В предпочтительном варианте указанное здесь заранее заданное значение находится в диапазоне от 15 до 50, деленное на радиус колеса одометра, выраженный в сантиметрах. При невыполнении указанного условия в накопитель записывают только один кадр, сформированный из усредненных значений в последовательностях значений соответствующих датчиков.
Указанный алгоритм проверки приращений одометрических данных позволяет исключить из алгоритма сжатия данных обработку не имеющих практического значения данных при недопустимом замедлении снаряда, записывая при этом контрольную информацию о прохождении участков с замедлением.
В дальнейшее развитие двух вариантов реализации изобретения в процессе пропуска измеряют пройденную внутри трубопровода дистанцию с помощью двух одометров, каждый кадр включает в себя запись показаний счетчиков одометрических импульсов от каждого из одометров, в процессе цифрового преобразования данных из буфера считывают последовательность показаний счетчика первого одометра и последовательность показаний счетчика второго одометра, в каждой последовательности вычисляют разность между последним и первым значением в последовательности, сравнивают полученные разности, определяют последовательность, значение разности в которой больше, как последовательность ведущего одометра, ставят в соответствие последовательности ведущего одометра номер одометра, которому соответствует последовательность ведущего одометра, выполняют цифровое преобразование последовательности ведущего одометра.
Указанный алгоритм определения пройденной внутри трубопровода дистанции позволяет полностью исключить ошибки, связанные с остановкой колеса одного из одометров, поскольку учитывается только наиболее быстрый одометр.
Предпочтительна реализация заявленного способа, при котором с периодом 3-300 с записывают текущие значения датчиков и информацию о записанных данных, информация о записанных данных включает в себя номера или наименования файлов записанных данных от датчиков профиля трубопровода, номера или наименования блоков данных, признаки индикации ошибки регистрации при записи, при обращении к внешнему устройству, сбоя функционирования внешнего устройства, максимальные и минимальные значения показаний датчиков профиля трубопровода.
Описанный алгоритм позволяет записывать данные, если обследуется трубопровод, внутренняя поверхность которого сильно парафинизирована, и измерения с помощью одометров, колеса которых проскальзывают, не отражают реальное перемещение диагностического снаряда. Значение указанного периода, большее 300 с, не позволит использовать данные для восстановления профиля парафинизированного участка трубопровода методом интерполяции из-за недостаточного для этого метода разрешения по длине трубопровода, значение периода меньше 3 с сделает описанные выше алгоритмы преобразования данных неэффективными, поскольку в этом случае при действительном замедлении снаряда объем данных в результате безусловного периодического сканирования будет сравним или превысит объем данных, накапливаемых в результате реализации описанных выше алгоритмов преобразования данных.
В процессе пропуска регистрируют сигналы от источников маркерных сигналов, установленных вне трубопровода, с помощью датчиков маркерных сигналов, указанные сигналы оцифровывают, выполняют считывание первого бита каждого маркерного значения и запись полученных одноразрядных маркерных значений в накопитель цифровых данных.
В процессе пропуска выполняют навигационные измерения и/или измерения профиля сечения трубопровода.
Указанные навигационные измерения выполняют с помощью датчиков линейных ускорений и/или датчиков угловых скоростей.
Указанные измерения профиля сечения трубопровода выполняют с помощью множества рычагов, прижимаемых к внутренней поверхности трубопровода по периметру в сечении трубопровода, путем измерения изменения угла поворота каждого из рычагов.
В одном из исполнений изобретения измерения профиля сечения трубопровода выполняются с помощью датчиков, по крайней мере, одного из типов: в виде ультразвуковых, магнитных или вихретоковых датчиков.
В процессе цифрового преобразования данных выполняют преобразование одометрической последовательности, для каждого значения последовательности, кроме первого, вычисляют разность между каждым значением и предыдущим ему значением, в преобразуемой последовательности заменяют все значения, кроме первого, на соответствующие указанные разности значений, разрядность указанных разностей, по крайней мере, в четыре раза меньше разрядности значений в исходной последовательности, полученную последовательность записывают в указанный ранее накопитель.
Реализация заявленного алгоритма преобразования одометрических данных с контролем по записанным данным с исходной разрядностью показала, что указанный алгоритм позволяет уменьшать объем одометрических данных без каких-либо потерь, поскольку с учетом реальной максимальной скорости снаряда в трубопроводе максимальная разрядность приращений показаний одометров более чем в четыре раза меньше разрядности абсолютных значений, накапливаемых счетчиком одометрических импульсов.
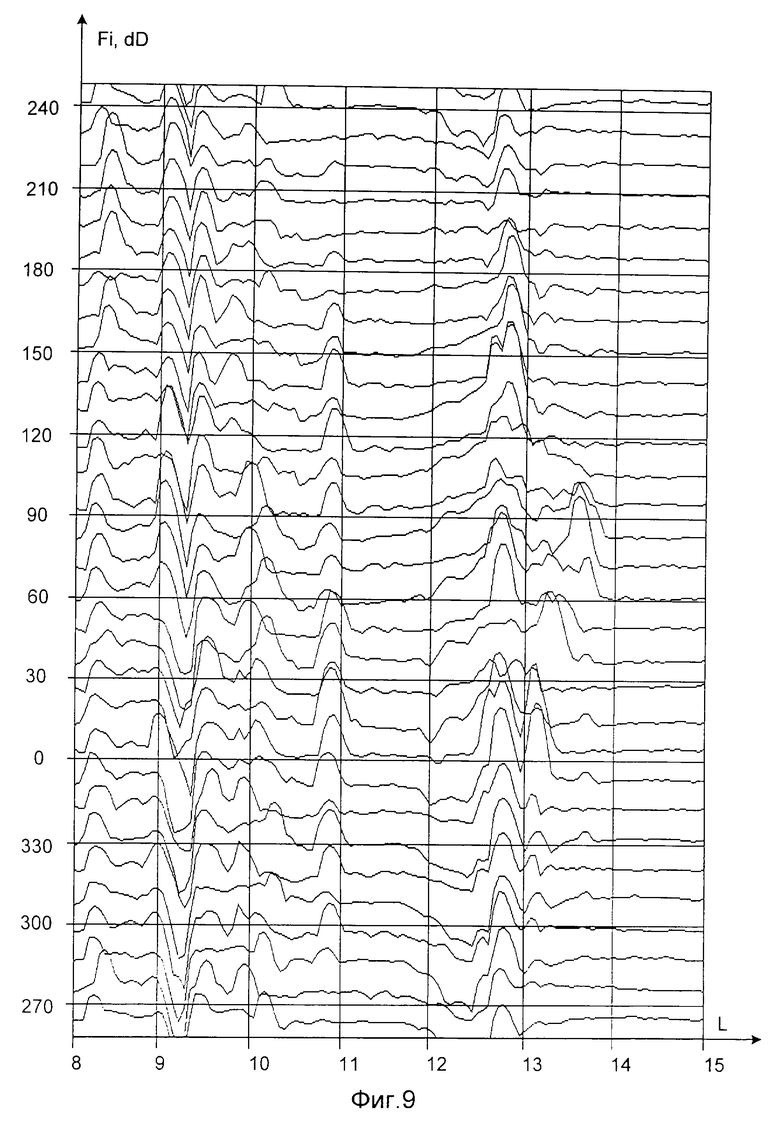
На фиг.1 изображен снаряд для обследования профиля трубопровода;
на фиг. 2 изображен фрагмент снаряда для обследования трубопровода с установленными на нем рычагами, чувствительными к профилю сечения трубопровода;
на фиг.3 изображена схема устройства для обследования трубопроводов;
на фиг. 4 изображена схема, иллюстрирующая применение первого варианта заявленного способа обследования профиля трубопроводов;
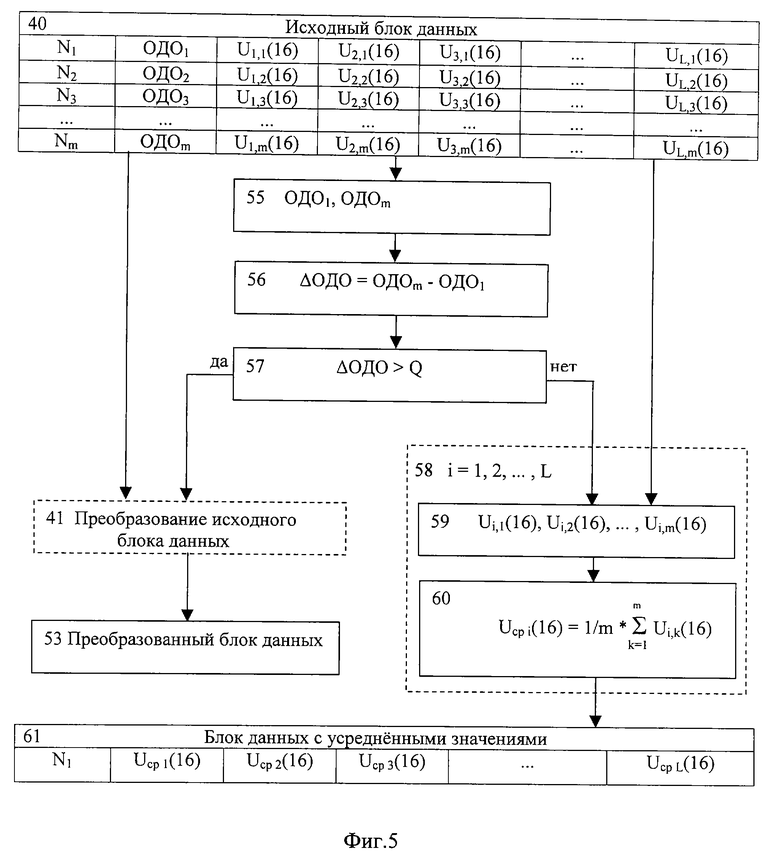
на фиг. 5 изображена схема, иллюстрирующая применение первого варианта заявленного способа обследования профиля трубопроводов с алгоритмом контроля изменений показаний одометров;
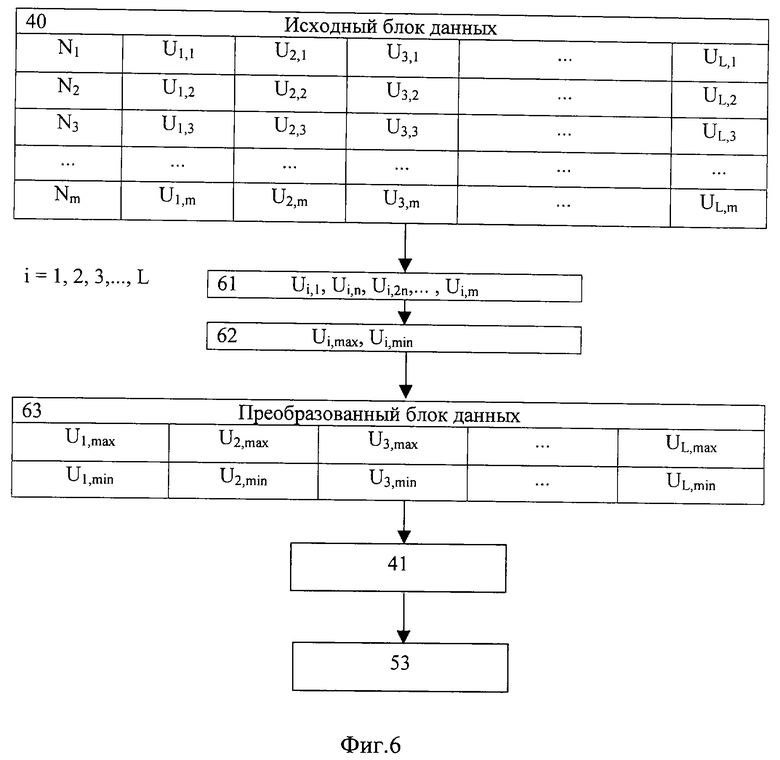
на фиг. 6 изображена схема, иллюстрирующая применение второго варианта заявленного способа обследования профиля трубопроводов;
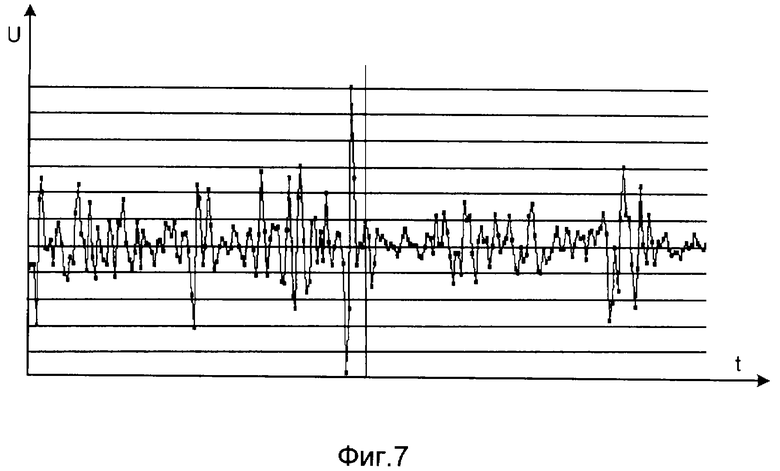
на фиг. 7 изображены записанные значения показаний одного из акселерометров;
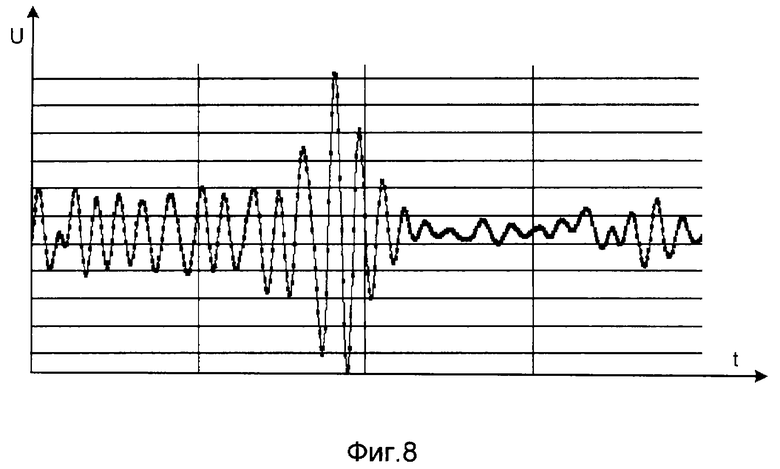
на фиг.8 изображены записанные значения показаний одного из датчиков угловой скорости;
на фиг.9 изображены записанные значения показаний датчиков профиля сечения трубопровода, полученные в результате пропуска диагностического снаряда.
В результате выполнения работ по разработке и созданию средств внутритрубной диагностики, позволяющих повысить достоверность идентификации разрывоопасных участков магистральных трубопроводов с напряженно-деформированным состоянием, была разработана серия внутритрубных снарядов для обследования профиля трубопроводов номинальным диаметром от 10'' до 56'' и разработаны оптимальные способы выполнения измерений, обработки получаемых данных в процессе пропуска и их записи. Разработанные снаряды выдерживают давление среды до 80 атм, имеют проходимость около 75% диаметра трубопровода, работают при температурах перекачиваемой среды от -15oС до +50oС, минимальный проходимый радиус поворота около 1,5 диаметра трубопровода. В снарядах реализованы виды взрывозащиты "Взрывонепроницаемая оболочка", "Искробезопасная электрическая цепь" при среднем токе потребления аппаратуры снарядов не более 500 мА, "Специальный вид взрывозащиты".
На фиг.1 изображен снаряд для обследования трубопроводов диаметром 48''. Корпус снаряда 1 включает в себя взрывонепроницаемые герметичные оболочки, на корпусе снаряда установлены полиуретановые манжеты 2 для центровки снаряда и его продвижения внутри трубопровода вместе с транспортируемым продуктом, два пояса рычагов 3 (фиг.1, фиг.2), чувствительных к профилю сечения трубопровода, одометры 4 (фиг.1, фиг.3) для измерения длины пройденного внутри трубопровода пути, низкочастотный электромагнитный маркерный приемопередатчик 5 для уточнения положения снаряда внутри трубопровода. Угол поворота рычагов 3 измеряют с помощью датчиков угла поворота 7 (фиг.2, фиг.3) на основе датчиков Холла в поле постоянных магнитов, в качестве источника питания используются устанавливаемые в оболочках аккумуляторные батареи или батареи гальванических элементов емкостью до 300 А•ч. Позиция 8 на фиг.2 показывает направление движения снаряда внутри трубопровода.
В оболочках 6 (фиг.2) установлены электронные средства: датчики навигации 12 (фиг.3) (акселерометры и датчики угловой скорости), аналого-цифровые преобразователи 14, 15, 16, средства цифровой обработки 17 оцифрованных данных, буфер ОЗУ 18, накопитель цифровых данных 19 в виде одного или нескольких флэш-дисков типа PQI. Датчики профиля сечения трубопровода 7 (фиг.3) (датчики угла поворота рычагов 3) подключены к АЦП 14, датчики навигации 12 подключены к АЦП 15, одометры 4 подключены к АЦП 16. Процессом измерений и цифровой обработкой данных управляет бортовой компьютер, включающий в себя средства цифровой обработки 17 и накопители 19 и выполненный на основе процессора типа MOPS фирмы JumpTec с интегрированной памятью прямого доступа RAM объемом 64 Мбайт, в которой в процессе работы снаряда организуется буфер ОЗУ 18. АЦП 14, 15 выполнены в виде 16-разрядных АЦП RealTime Device, АЦП 16 - в виде формирователя последовательности прямоугольных сигналов из последовательности аналоговых сигналов. Входы управления АЦП и выходы данных АЦП подключены к средствам цифровой обработки данных 17.
Устройство работает следующим образом.
Снаряд помещают в трубопровод и включают перекачку продукта (нефти, газа, нефтепродукта) по трубопроводу. При движении снаряда по трубопроводу с частотой, управляемой бортовым компьютером, снимаются показания датчиков угла поворота, акселерометров, датчиков угловых скоростей, одометров и других датчиков. Оцифрованные данные проходят цифровую обработку и записываются во флэш-диски. По завершении контроля заданного участка трубопровода снаряд извлекают из трубопровода и переносят накопленные в процессе диагностического пропуска данные на компьютер, предназначенный для обработки накопленных данных и их интерпретации.
Последующий анализ записанных данных позволяет восстановить профиль сечения трубопровода, пространственное положение обследованного трубопровода, идентифицировать участки с напряженно-деформированным состоянием и определить допустимые режимы перекачки транспортируемой среды по обследованному трубопроводу.
В наилучшем исполнении заявленный способ реализуется следующим образом: в буфере ОЗУ 18 (фиг.3) накапливают исходный блок данных 40 (фиг.4), содержащий m кадров.
Блок данных 40 в зависимости от скорости снаряда может формироваться из всех измеренных кадров данных или формироваться путем прореживания кадров данных: так что в блок данных 40 записывается каждый 5-20 кадр измеренных данных.
Каждый кадр содержит абсолютный номер кадра (сплошная нумерация ведется с момента запуска снаряда до окончания пропуска) и L оцифрованных значений датчиков (в частности, акселерометров и/или датчиков угловых скоростей). В процессе преобразования сжатия 41 данных из буфера считывают последовательности шестнадцатиразрядных данных 42: Ui,1(16), Ui,2(16),...,Ui,m(16). Последовательности считывают последовательно для всех L датчиков, начиная с первого.
Для каждой последовательности 42 выполняют:
вычисление 43 (начиная со второго значения (k=2) в последовательности) приращения значения по сравнению с предыдущим значением: ΔUi,k(16)= Ui,k(16)-Ui,k-1(16), k=2, 3,...,m.
Находят максимальное значение 44 из указанных приращений.
Для той же последовательности 42 выполняют:
вычисление 45 среднего значения в последовательности 42:
вычисление 46 (начиная со второго значения (k=2) в последовательности) приращения значения по сравнению с указанным средним значением Ucpi.: ΔUcp.i,k(16)=Ui,k(16)-Ucpi(16), k=2, 3,...,m.
Находят максимальное значение 47 из указанных приращений от среднего.
Выполняют проверку условия 48: максимальное значение из 44 меньше максимального значения из 47.
При выполнении условия 48 выполняют побитное копирование 49 каждого из значений указанной последовательности приращений ΔUi,k(16)-->ΔUi,k(n), k=2, 3,...,m, путем считывания первых n бит каждого из приращений и записи в виде значений новой последовательности с разрядностью n каждого значения.
Формируют новую последовательность значений 50, в которой первое значение (16-разрядное) совпадает с первым значением в исходной последовательности, а значения, начиная со второго, заменяются на соответствующие n-битные значения приращений: Ui,1(16), ΔUi,2(n), ΔUi,3(n),...,ΔUi,m(n).
Полученную последовательность записывают в преобразованный блок данных 53.
При невыполнении условия 48 (выполнении обратного условия) выполняют побитное копирование 51 каждого из значений указанной последовательности приращений ΔUcp.i,k(16)-->ΔUcp.i,k(n), k=2, 3,...,m, путем считывания первых n бит каждого из приращений и записи в виде значения новой последовательности с разрядностью n каждого значения.
Формируют новую последовательность значений 52, в которой первое значение (16-разрядное) заменяется на среднее значение в каждой исходной последовательности, а значения последовательности, начиная со второго, заменяются на соответствующие n-битные значения приращений: Ucp.i(16), ΔUcp.i,2(n), ΔUcp.i,3(n),...,ΔUcp.i,m(n).
Полученную последовательность записывают в преобразованный блок данных 53.
Далее повторяют описанную последовательность 41: действия 42-48 (и 49-50 либо 51-52) для второго, третьего и т.д. датчика.
В результате выполнения указанных преобразований формируется преобразованный блок данных 53, в первый кадр которого записаны 16-разрядные значения: U1,1(16), U2,1(16), U3,1(16),...,UL,1(16), совпадающие с соответствующими значениями исходного блока данных, либо 16-разрядные значения: Ucp.1(16), Ucp.2(16), Ucp.3(16),...,Ucр.L(16), соответствующие средним значениям соответствующих последовательностей исходного блока данных.
В остальные кадры записаны n-разрядные значения ΔU1,k(n), ΔU2,k(n), ΔU3,k(n), . . . , ΔUL,k(n) (k= 2, 3, ....m) либо ΔUcp.1,k(n), ΔUcp.2,k(n), ΔUcp.3,k(n), . . . , ΔUcp.L,k(n) (k=2, 3,...,m) вместо 16-разрядных значений исходного блока данных.
В наилучшем исполнении (фиг. 5) каждый кадр включает в себя показание одометра ОДОk, k=1, 2, 3,...,m. В процессе цифрового преобразования данных из исходного блока данных 40 считывают показания одометра 55 из первого и последнего кадров блока данных: ОДO1 и ОДОm, вычисляют разность 56: ΔОДО= ОДОm-ОДО1.
Далее выполняют проверку условия 57: ΔОДО>Q, где Q составляет значение от 2 до 100 и, как правило, равно тридцати, деленному на радиус колеса одометра в сантиметрах.
При выполнении условия 57 выполняются описанная ранее последовательность преобразований 41 и запись в описанный ранее преобразованный блок данных 53 (фиг.4, фиг.5).
При невыполнении условия 57 выполняется последовательность преобразований 58, которая включает в себя: считывание последовательности 59 значений для каждого датчика Ui,1(16), Ui,2(16),...,Ui,m(16), вычисление 60 среднего значения для каждой такой последовательности 59, формирование блока данных 61, состоящего из одного кадра, включающего усредненные значения последовательностей соответствующих датчиков.
В наилучшем исполнении второй вариант изобретения реализуется при цифровом преобразовании данных от датчиков профиля сечения трубопровода: в буфере ОЗУ 38 (фиг. 3) накапливают исходный блок данных 40 (фиг.6), содержащий m кадров данных от датчиков угла поворота рычагов, накопленных за время изменения показаний одометра на 0,2-10 см в зависимости от требований к точности выполнения измерений в данном диагностическом пропуске снаряда. Показания датчиков выделяют в виде последовательностей 61 (фиг.6) показаний каждого датчика профиля трубопровода, в выделенной последовательности определяют минимальное и максимальное значение 62 (фиг.6) в последовательности и записывают указанные значения в преобразованный блок данных 63. Накопленный таким образом блок данных записывают в накопитель цифровых данных либо предварительно выполняют преобразование сжатия 41 (фиг.4, фиг.6) данных блока 63 по алгоритму, соответствующему первому варианту изобретения, отображенному на фиг. 4, фиг.5, и уже преобразованный таким образом блок данных 53 записывают в накопитель цифровых данных.
Датчики для измерений угла поворота рычагов и навигационных измерений опрашивают с частотой около 1 кГц, средняя частота записи соответствующих значений в накопитель цифровых данных составляет 125 Гц.
Число кадров в блоке данных составляет 1024. Для трубопровода с типоразмером 48'' пройденную внутри трубопровода дистанцию измеряют с помощью двух одометров с радиусом измерительного колеса каждого одометра 5 см, каждый кадр включает в себя запись показаний счетчиков одометрических импульсов от каждого из одометров, в процессе цифрового преобразования данных из буфера считывают последовательность показаний счетчика первого одометра и последовательность показаний счетчика второго одометра, в каждой последовательности вычисляют разность между последним и первым значением в последовательности, сравнивают полученные разности, определяют последовательность, значение разности в которой больше, как последовательность ведущего одометра, ставят в соответствие последовательности ведущего одометра номер одометра, которому соответствует последовательность ведущего одометра, выполняют цифровое преобразование последовательности ведущего одометра.
При преобразовании последовательности ведущего одометра определяют выполнение условия, состоящего в том, что указанное приращение показаний одометра больше 10, преобразование цифровых данных выполняют после получения положительного результата выполнения указанного условия.
С периодичностью 100 с записывают текущие значения от датчиков профиля и одометров, информацию о записанных данных, которая включает в себя номера или наименования файлов записанных данных по профилю трубопровода, номера или наименования блоков, признаки индикации ошибки регистрации при записи, при обращении к внешнему устройству, сбоя функционирования внешнего устройства, максимальные и минимальные значения показаний датчиков профиля.
В процессе пропуска регистрируют сигналы от источников маркерных сигналов, установленных вне трубопровода, с помощью датчиков маркерных сигналов, указанные сигналы оцифровывают и записывают в кадр в оперативное запоминающее устройство 8 (фиг.3) в виде последовательности маркерных значений, в процессе цифрового преобразования данных выполняют считывание первого бита каждого маркерного значения и формируют последовательность полученных одноразрядных маркерных значений.
В процессе пропуска измеряют данные, отражающие пространственное положение трубопровода, а также пройденную внутри трубопровода дистанцию, линейную скорость снаряда внутри трубопровода.
На фиг. 7 и фиг.8 изображены характерные записанные значения показаний одного из акселерометров и одного из датчиков угловой скорости соответственно, полученные в процессе обследования магистрального трубопровода. Значение U - измеряемые напряжения на выходах датчиков. Расстояние между записанными значениями на временной оси t составляет 8 мс.
На фиг. 9 изображены характерные записанные значения показаний датчиков угла поворота рычагов 3. Длина пройденного пути L на оси абсцисс выражена в метрах; угол Fi, отсчитываемый вокруг главной оси трубопровода, выражен в градусах, dD - линейное отклонение каждого из 32 рычагов, установленных на снаряде с типоразмером 48'', в плоскости сечения трубопровода в масштабе 10 см на одно деление оси ординат.
Проводимые работы по обследованию магистральных трубопроводов с использованием заявленного изобретения в предпочтительном исполнении показали, что объем, занимаемый записанными данными профилеметрии в результате их преобразования, удается уменьшить более чем в восемь раз.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННОГО ОБСЛЕДОВАНИЯ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2001 |
|
RU2183011C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ МАГИСТРАЛЬНОГО ТРУБОПРОВОДА | 1999 |
|
RU2157514C1 |
| СПОСОБ ВНУТРИТРУБНОГО КОНТРОЛЯ ТРУБОПРОВОДОВ С ДИНАМИЧЕСКИМ РЕЖИМОМ СКАНИРОВАНИЯ | 2002 |
|
RU2205396C1 |
| УСТРОЙСТВО ДЛЯ ВНУТРИТРУБНОГО КОНТРОЛЯ ТРУБОПРОВОДОВ С ДИНАМИЧЕСКИМ РЕЖИМОМ СКАНИРОВАНИЯ | 2002 |
|
RU2201590C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2002 |
|
RU2205395C1 |
| ВНУТРИТРУБНЫЙ ИНСПЕКЦИОННЫЙ СНАРЯД | 2002 |
|
RU2205397C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2212660C1 |
| ВНУТРИТРУБНЫЙ МНОГОКАНАЛЬНЫЙ ПРОФИЛЕМЕР | 2000 |
|
RU2164661C1 |
| СПОСОБ ВНУТРИТРУБНОГО УЛЬТРАЗВУКОВОГО КОНТРОЛЯ | 2001 |
|
RU2194274C1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2163369C1 |
Изобретение относится к способам наблюдения за состоянием трубопроводов большей протяженности с помощью диагностического снаряда. Сущность изобретения: при обследовании трубопровода данные измерений оцифровывают и производят преобразование сжатия, которое включает выделение показаний каждого датчика и замену последовательностей. В одном варианте часть значений каждой последовательности заменяют на приращения от среднего и от первого значения в последовательности. Замена значений сопровождается понижением разрядности значений путем побитного копирования приращений. В другом варианте значения каждой последовательности заменяют на максимальное и минимальное значения. Число значений в исходной последовательности соответствует определенному изменению показаний одометров. Технический результат: увеличение объема измеренных данных и уменьшение объема данных, записанных в накопитель. 2 с. и 28 з.п.ф-лы, 9 ил.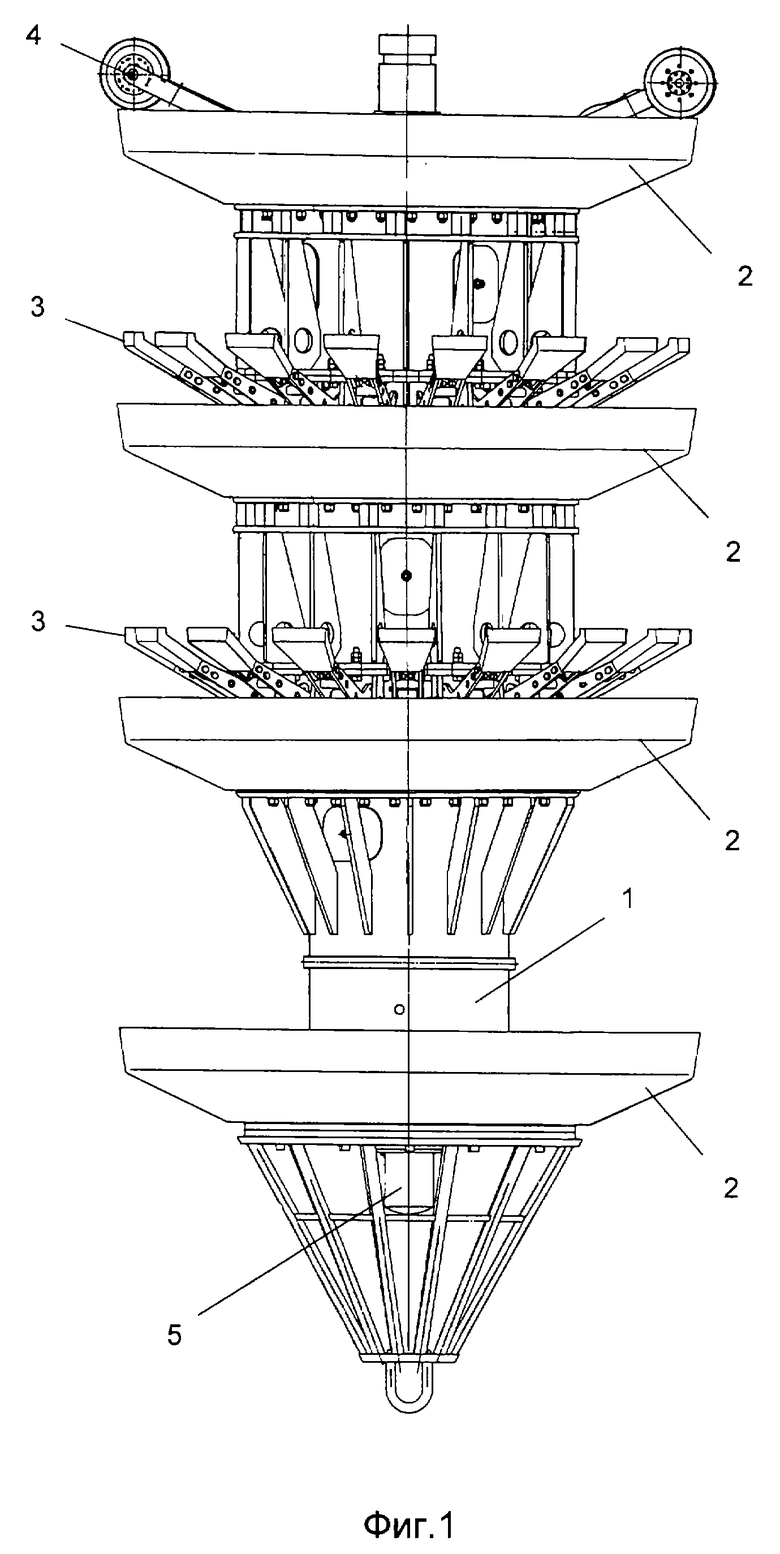
| Приспособление в пере для письма с целью увеличения на нем запаса чернил и уменьшения скорости их высыхания | 1917 |
|
SU96A1 |
| US 5299359, 27.04.1996 | |||
| Регулируемая тяга | 1989 |
|
SU1610100A1 |
| ВНУТРИТРУБНЫЙ ДЕФЕКТОСКОП | 2000 |
|
RU2163369C1 |
| Устройство для выявления деформированных участков труб и трубопроводов | 1990 |
|
SU1768941A1 |

