Изобретение относится к воспринимающему устройству для измерения положения, ускорения или гравитационного поля и компонентов его градиента, устройство включает в себя сферическую полость, которая содержит вещество датчика в виде текучей среды или иного инерционного материала, обладающего свойствами текучести.
Акселерометр, снабженный сферической полостью, известен, например, из патента США 3461730. Это известное устройство выдает абсолютное значение ускорения независимо от направления. В отличие от него устройство согласно изобретению можно использовать для измерения ускорения как векторной величины. Кроме того, известное устройство не включает в себя никаких указаний для определения положения устройства, тогда как одним из основных признаков настоящего изобретения является определение положения устройства.
Что касается уровня техники, можно также сослаться на патенты США 3992951 и ЕР 0566130. Последний относится к датчику вращательного движения и описывает принципы действия чувствительных элементов или преобразователей, которые могут применяться и в настоящем изобретении. Другими словами, датчики могут содержать пьезоэлектрические преобразователи, емкостные мембранные датчики и датчики удлинения полосы. Могут быть использованы и другие типы датчиков или преобразователей, что более подробно изложено ниже.
Задача изобретения состоит в том, чтобы создать воспринимающее устройство, способное определять положение устройства или величину и направление его ускорения в трех измерениях. Другими словами, воспринимающее устройство должно иметь равную направленность во всех направлениях, чтобы иметь возможность определять вектор ускорения, и, кроме того, служить для определения положения.
Эта задача решается посредством изобретения на основе отличительных признаков, сформулированных в прилагаемой формуле изобретения.
Воспринимающее устройство, отвечающее изобретению, находит применение, например, в:
в промышленном производстве и робототехнике в качестве указателя положения или трехмерного датчика прямолинейного движения (ускорения);
в системах навигации (инерционная навигация) на сухопутных средствах передвижения, кораблях и самолетах, в различных самоуправляемых или автопилотируемых подвижных устройствах;
в так называемых "черных ящиках" транспортных средств (в которых регистрируются все движения транспортного средства);
в геофизике, геотехнике и других областях строительной технологии, например, в качестве преобразователя трехмерной вибрации, датчика положения в буровых скважинах, датчика движения/положения для оборудования, буксируемого гидрографическими судами, и датчика для измерений гравитационного поля.
Изобретение описано более подробно со ссылками на чертежи, на которых
фиг.1 изображает сферическую полость в измерительном датчике с ее трехмерной системой координат;
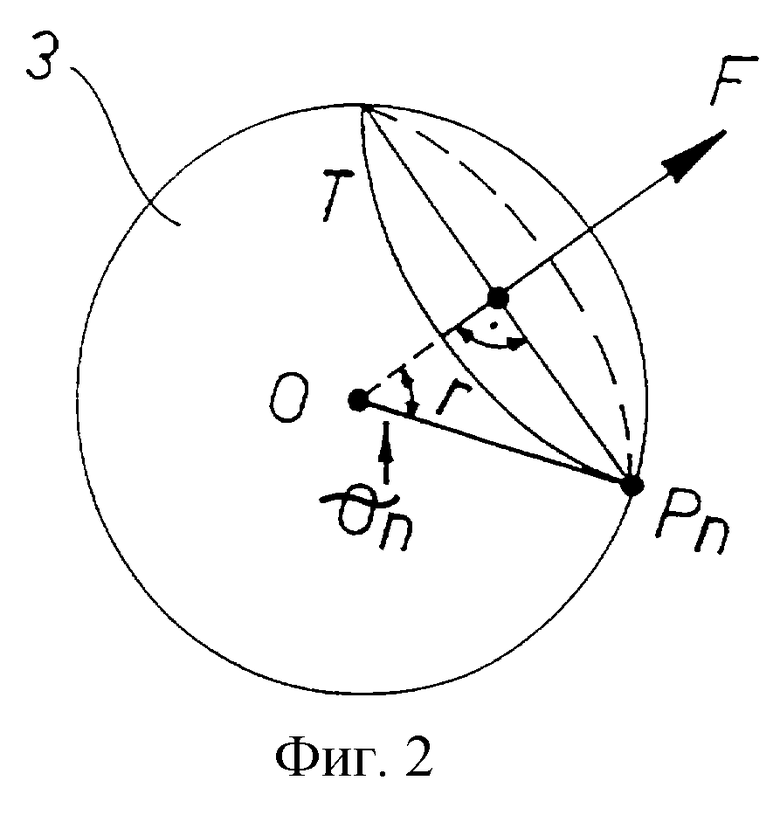
фиг. 2 изображает ту же полость, содержащую инерционную текучую среду, подвергающуюся воздействию вектора силы 
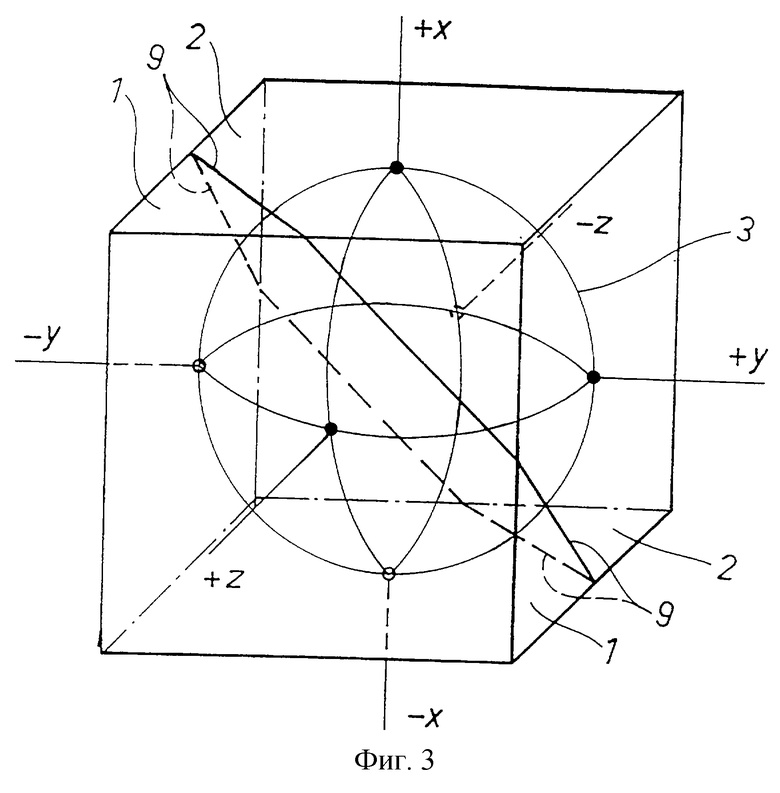
фиг.3 изображает один из вариантов конструкции блока датчика в воспринимающем устройстве согласно изобретению одного из вариантов осуществления и
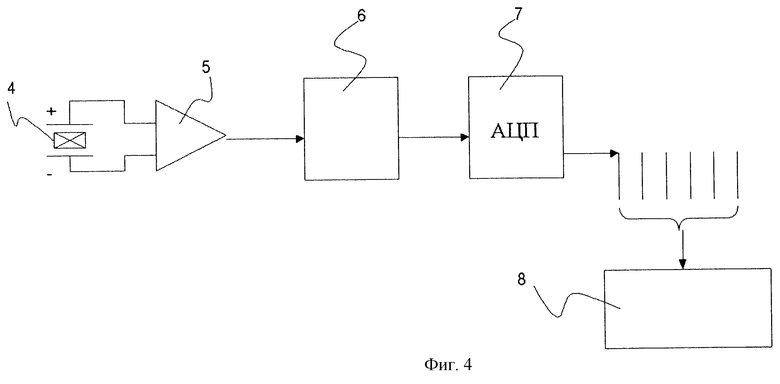
фиг. 4 представляет собой блок-схему, изображающую пример построения измерительной схемы воспринимающего устройства.
Прежде всего поясняются теоретические предпосылки изобретения со ссылкой на фиг.1 и 2. Согласно изображенному на фиг.1, сферический контейнер 3 содержит текучую среду, находящуюся под давлением р0. Контейнер 3 снабжен воображаемой прямоугольной системой координат x, y, z, положительные полуоси которой пересекают сферическую поверхность в точках P1, Р3 и P5, а отрицательные полуоси - соответственно в точках Р2, Р4 и Р6.
По меньшей мере, в точках Р размещены датчики (измерительные датчики или электроды), которые измеряют некоторую физическую характеристику текучей среды датчика как функцию давления жидкости.
Если тело, которое содержит контейнер 3 с текучей средой, движется с ускорением  жидкость внутри контейнера вследствие инерции развивает давление, максимальная величина которого равна
жидкость внутри контейнера вследствие инерции развивает давление, максимальная величина которого равна
где γ - плотность жидкости и r - радиус контейнера.
Это давление равно 0 в точке, где направление вектора ускорения, проходящее через центр сферической поверхности, пересекает указанную сферическую поверхность, и максимальная величина давления, выражаемая формулой (1), обнаруживается на пересечении направления противоположного вектора со сферической поверхностью.
Если Т - это плоскость, перпендикулярная к вектору  проходящая через точку Рn (n=1...6), на основании фиг.2 можно заключить, что:
проходящая через точку Рn (n=1...6), на основании фиг.2 можно заключить, что:
расстояние между плоскостью Т и центром сферической поверхности равно
расстояние плоскости Т от точки, в которой давление текучей среды, обусловленное инерцией, равно 0, равно
r(1-cosθn),
в точке Рn существует давление
pn = γr(1-cosθn)F,
давление pn+1 = γr(1+cosθn)F,
поскольку cos(θ+π) = -cosθ.
В вышеприведенных формулах и на фиг.2 ,
,
r - радиус, - единичный вектор,
- единичный вектор, - единичный вектор в направлении
- единичный вектор в направлении  ,
,
θn - угол между векторами.
Если, согласно исходной посылке, жидкость находится под дополнительным давлением р0, давления, измеренные в точках Рn и Pn+1, равны соответственно (рn+р0) и (pn+1+p0).
Тогда
и соответственно
Отсюда
следовательно,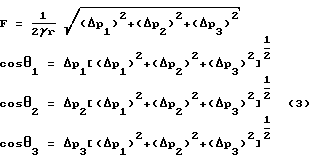
чем определяются величина и направление вектора ускорения  относительно системы координат. В простейшем случае зависимость между сигналом и давлением, подлежащим измерению в точках Рn, линейна. Сигнал равен k • давление.
относительно системы координат. В простейшем случае зависимость между сигналом и давлением, подлежащим измерению в точках Рn, линейна. Сигнал равен k • давление.
S=k•p, следовательно
и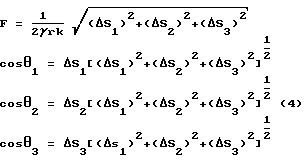
В случаях, отличающихся от случая простой зависимости, выраженной вышеприведенными формулами, давление определяется в каждом случае в соответствии с отдельными точками замера и, затем, с применением формул, соответствующих системам уравнений (2) и (3).
Чтобы определить давление на основании измеренных сигналов, можно использовать компьютер или иные вычислительные схемы, управляемые микропроцессором.
На фиг.4 изображен пример конструкции измерительной схемы в случае пассивного датчика. Пьезодатчик 4 или другой датчик, реагирующий на давление, помещается в точке замера Рn. Предусилитель 5 усиливает сигнал датчика, который через устройство сопряжения сигнала поступает на аналого-цифровой преобразователь (АЦП) 7. Цифровые сигналы, поступающие от разных датчиков, подаются на компьютер 8, который осуществляет необходимые вычисления в соответствии с вышеприведенными формулами.
Фиг.3 изображает блок датчика, который содержит кубической формы корпус, собранный из отдельных деталей 1, 2, находящихся по разные стороны плоскости раздела 9, в которых посредством машинной обработки проделаны углубления, представляющие собой половины сферической полости 3, и датчики, устанавливаемые в них до того, как половины куба будут соединены друг с другом.
Вещество датчика, заполняющее полость 3, представляет собой текучую среду, жидкость или газ или какое-либо другое вещество, обладающее свойством текучести, например гель или коллоид. Если текучая среда, используемая в датчике, является электрически или оптически нейтральной по отношению к давлению, давление измеряется непосредственно с помощью датчика (пассивного или активного), встроенного в систему. Главный признак изобретения заключается в том, что текучая среда датчика является общей для всех датчиков, осуществляющих трехмерное измерение. Датчики могут реагировать на изменения давления текучей среды датчика, например, одним из следующих способов:
изменением заряда или потенциала пьезокристалла или пластика, включенного в чувствительный элемент,
изменением емкости в емкостном чувствительном элементе, обусловленным просачиванием вещества датчика внутрь элемента,
изменением размеров полостного резонатора или резонансной полости волновода.
Вещества датчика, которые способны электрически или оптически реагировать на давление, существующее в веществе, могут реагировать на изменение давления, вызванное ускорением, например, одним из следующих способов:
диэлектрической поляризацией (изменения электрического поля внутри вещества),
изменением электропроводности (пьезорезистивный эффект),
изменением оптических свойств,
пьезоэлектричеством.
При использовании вещества датчика такого типа вещество датчика внутри полости может быть неотъемлемой частью измерительных датчиков. Например, для измерения изменений, происходящих в веществе датчика, достаточно просто установить электроды на поверхности полости.
Воспринимающее устройство согласно изобретению отличается тем, что конструкция, измеряющая его положение или ускорение в трех измерениях, представляет собой компактный блок, имеющий высокую степень интеграции. В настоящее время такое выполнение требует размещения трех отдельных воспринимающих устройств, соединение которых сопряжено как с механическими трудностями, так и с проблемами, касающимися обработки результатов. Эти проблемы разрешаются посредством воспринимающего устройства согласно изобретению.
Воспринимающее устройство способно измерять положение своего основания, которое находится в покое или в состоянии равномерного движения. В случае, когда воспринимающее устройство находится в состоянии ускоренного движения и требуется измерить ускорение как векторную величину, ускорение свободного падения и положение должны быть известны или введены в систему из внешнего источника. Если необходимо измерить положение в то время, как воспринимающее устройство находится в состоянии ускоренного движения, ускорение движения должно быть известно или введено в систему из внешнего источника.
Как известно, разность давлений между двумя точками в текучей среде, обусловленная ускорением силы тяжести, связана с разностью гравитационных потенциалов между этими точками.
Таким образом, частные дифференциалы второго порядка от давления связаны с компонентами тензора градиента гравитационного поля.
Это означает, что настоящее изобретение можно использовать также для измерения всех компонентов градиента гравитационного поля в случае, когда точки измерения давления добавляются по мере необходимости.
Использование: для измерения положения, ускорения или гравитационного поля и компонентов его градиента. Сущность: устройство включает в себя сферическую полость (3), которая содержит вещество датчика в виде текучей среды или другого инерционного материала, обладающего свойством текучести. Полость (3) снабжена измерительными датчиками или измерительными электродами (-х, +х; -у, +у; -z, +z) для трех различных координатных осей х, у, z, причем все указанные датчики реагируют на поведение указанной общей инерционной массы, которая заполняет полость (3). Подобное сборное единое компактное измерительное устройство может быть использовано для определения любой из указанных величин в трех измерениях. Технический результат: определение положения устройства или величины и направления его ускорения в трех измерениях. 1 з.п. ф-лы, 4 ил.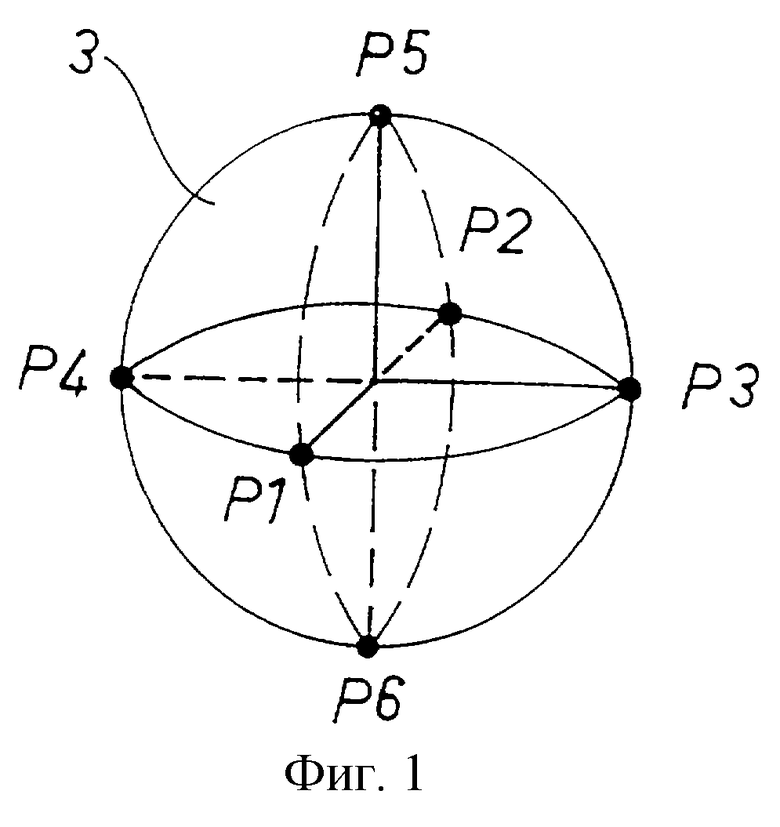
| US 3461730 А, 19.08.1969 | |||
| US 3706217 А, 19.12.1972 | |||
| ВОЛОКОННО-ОПТИЧЕСКИЙ АКСЕЛЕРОМЕТР | 1991 |
|
RU2010235C1 |
| US 3742767 А, 03.07.1973 | |||
| УГЛОВОЙ АКСЕЛЕРОМЕТР | 1986 |
|
SU1501726A1 |

