Изобретение относится к системам управления технологическими процессами с постоянным транспортным запаздыванием материальных потоков, которое может быть определено с точностью не хуже 30%, а материальные потоки подвержены аддитивному возмущению.
Наиболее близким техническим решением к предлагаемому является система автоматического управления для объектов с запаздыванием /1/, содержащая задатчик входного сигнала, первый элемент сравнения, регулятор, объект регулирования, интегратор и второй элемент сравнения, выходной сигнал задатчика входного сигнала поступает на суммирующий вход первого элемента сравнения, сигнал с выхода первого элемента сравнения поступает на вход регулятора, сигнал с выхода регулятора поступает на вход объекта регулирования, на который действует аддитивное возмущение, а также на суммирующий вход второго элемента сравнения, на вычитающий вход которого поступает сигнал с выхода интегратора, во втором элементе сравнения формируется сигнал, поступающий на вход интегратора, где интегрируется, и поступает на второй вычитающий вход первого элемента сравнения, на первый вычитающий вход которого подается сигнал с выхода объекта регулирования.
Недостатком этой системы является то, что при изменении параметров объекта управления может произойти не только значительное ухудшение качества ее функционирования, но и потеря в системе управления устойчивости.
Целью изобретения является улучшение качества управления при медленном и существенном изменении параметров объекта.
Поставленная цель достигается тем, что в системе, содержащей задатчик входного сигнала, первый элемент сравнения, регулятор, объект регулирования, интегратор и второй элемент сравнения, задатчик входного сигнала соединен с суммирующим входом первого элемента сравнения, выход которого через регулятор соединен с суммирующим входом второго элемента сравнения и входом объекта регулирования, выход которого является выходом системы и соединен с первым вычитающим входом первого элемента сравнения, интегратор, выход которого соединен с вычитающим входом второго элемента сравнения, выход второго элемента сравнения соединен с входом интегратора, введены блок вычисления модуля, второй интегратор и умножитель; вход блока вычисления модуля соединен с выходом первого элемента сравнения, выход блока вычисления модуля соединен с входом второго интегратора, первый вход умножителя соединен с выходом второго интегратора, второй вход - с выходом второго элемента сравнения, выход умножителя соединен со вторым вычитающим входом первого элемента сравнения.
Вводя в систему блок вычисления модуля, второй интегратор и умножитель, получают новую функцию, которая заключается в том, что при существенном изменении параметров объекта управления качество ее работы остается достаточно хорошим.
На чертеже представлена блок-схема предлагаемой системы управления.
Система содержит задатчик 1 входного сигнала, первый элемент 2 сравнения, регулятор 3, объект 4 регулирования, первый 5 интегратор, второй элемент 6 сравнения, блок 7 вычисления модуля, второй 8 интегратор, умножитель 9.
Система функционирует следующим образом.
Выходной сигнал задатчика 1 входного сигнала поступает на суммирующий вход первого элемента 2 сравнения, в котором формируется сигнал, поступающий на вход регулятора 3 и на вход блока 7 вычисления модуля. В качестве регулятора 3 может быть использован один из известных регуляторов, имеющих передаточные функции, например, вида
где К1, К2, К3, Т1, Т2 - некоторые константы.
Выходной сигнал регулятора 3 поступает на вход объекта 4 регулирования, а также на суммирующий вход второго элемента 6 сравнения, на вычитающий вход которого поступает сигнал с выхода первого 5 интегратора. Во втором элементе 6 сравнения формируется сигнал, поступающий на вход первого 5 интегратора, где интегрируется, и поступает на второй вход умножителя 9, на первый вход которого подается сигнал с выхода второго 8 интегратора. Сигнал с выхода блока 7 вычисления модуля поступает на вход второго 8 интегратора, где интегрируется. Сигнал с выхода умножителя 9 поступает на второй вычитающий вход первого элемента 2 сравнения, на первый вычитающий вход которого подается сигнал с выхода объекта 4 регулирования.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторское свидетельство СССР 1667001, кл. G 05 B 11/01 (прототип).
Изобретение относится к системам управления технологическими процессами с постоянным транспортным запаздыванием материальных потоков, которое может быть определено с точностью не хуже 30%, а материальные потоки подвержены аддитивному возмущению. Технический результат заключается в улучшении качества управления при медленном и существенном изменении параметров объекта. Система содержит регулятор, два элемента сравнения, два интегратора, блок вычисления модуля, умножитель. 1 ил.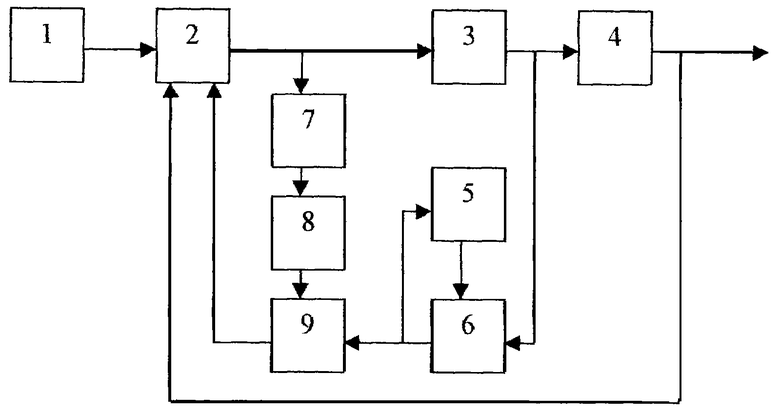
Система автоматического управления для объектов с запаздыванием, содержащая задатчик входного сигнала, соединенный с суммирующим входом первого элемента сравнения, выход которого через регулятор соединен с суммирующим входом второго элемента сравнения и входом объекта регулирования, выход которого является выходом системы и соединен с первым вычитающим входом первого элемента сравнения, первый интегратор, выход которого соединен с вычитающим входом второго элемента сравнения, выход второго элемента сравнения соединен с входом первого интегратора, отличающаяся тем, что в систему введены блок вычисления модуля, второй интегратор и умножитель, вход блока вычисления модуля соединен с выходом первого элемента сравнения, выход блока вычисления модуля соединен с входом второго интегратора, первый вход умножителя соединен с выходом второго интегратора, второй вход - с выходом второго элемента сравнения, выход умножителя соединен со вторым вычитающим входом первого элемента сравнения.
| Система автоматического управления для объектов с запаздыванием | 1989 |
|
SU1667001A1 |
| Система автоматического управления для астатических объектов с запаздыванием | 1989 |
|
SU1631515A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| US 4210853 A, 01.07.1980. | |||

