Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием.
Наиболее близким техническим решением к предлагаемому является система автоматического управления для астатических объектов с запаздыванием [1], содержащая первый интегратор и последовательно соединенные задатчик управляющего сигнала, первый сумматор, регулятор, второй сумматор, первый вход которого подключен к выходу блока запаздывания, выход регулятора через объект регулирования соединен с выходом системы автоматического управления, второй интегратор, вход которого соединен с выходом второго сумматора, выход регулятора через первый интегратор соединен с входом блока запаздывания и вторым входом второго сумматора, третий вход которого подключен к выходу второго интегратора, выход системы автоматического управления связан со вторым входом первого сумматора, третий вход которого подключен к выходу второго интегратора.
Недостатком этой системы является сложность контура.
Целью изобретения является упрощение системы без ухудшения качества работы.
Поставленная цель достигается тем, что из системы, содержащей задатчик управляющего сигнала, первый сумматор, регулятор, объект регулирования и последовательно соединенные первый интегратор, блок запаздывания, второй сумматор и второй интегратор, выход задатчика управляющего сигнала поступает на первый вход первого сумматора, выход которого соединен с входом регулятора, управляющее воздействие с выхода регулятора подается соответственно на входы объекта регулирования, первого интегратора и на четвертый вход второго сумматора, выход объекта регулирования соединен со вторым входом первого сумматора, выход первого интегратора соединен с входом блока запаздывания и вторым входом второго сумматора, выход блока запаздывания соединен с первым входом второго сумматора, выход второго сумматора соединен с входом второго интегратора, выход второго интегратора соединен с третьим входом второго сумматора и третьим входом первого сумматора, исключены блок запаздывания и второй интегратор таким образом, что выход сумматора соединен с входом интегратора, выход интегратора соединен со вторым вычитающим входом первого сумматора.
На чертеже представлена блок-схема предлагаемой системы управления.
Система содержит задатчик 1 сигнала, первый 2 сумматор, регулятор 3, объект 4 регулирования, интегратор 5, второй 6 сумматор.
Выход задатчика 1 связан с первым входом сумматора 2, выход которого подключен к входу регулятора 3, выход регулятора соединен с входом объекта регулирования 4 и первым входом второго сумматора 6, выход объекта регулирования соединен со вторым входом первого сумматора 2, выход второго сумматора 6 соединен с входом интегратора 5, выход которого соединен с соответствующим входом первого сумматора 2 и вторым входом второго сумматора 6.
Система функционирует следующим образом.
Выходной сигнал U1 задатчика 1 входного сигнала поступает на суммирующий вход первого сумматора 2, где формируется сигнал U2=Е, который поступает на вход регулятора 3. Управляющее воздействие U3=U с выхода регулятора 3 подается одновременно на вход объекта 4 регулирования, на который действует аддитивное возмущение f, удовлетворяющее условиям:
а также на суммирующий вход второго сумматора 6, на вычитающий вход которого поступает сигнал U5=X1 с выхода интегратора 5. Во втором сумматоре 6 формируется сигнал  поступающий на вход интегратора 5, где интегрируется и поступает на второй вычитающий вход первого сумматора 2, на первый вычитающий вход которого подается сигнал U4=y с выхода объекта 4 регулирования. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование трех сигналов с соответствующими коэффициентами
поступающий на вход интегратора 5, где интегрируется и поступает на второй вычитающий вход первого сумматора 2, на первый вычитающий вход которого подается сигнал U4=y с выхода объекта 4 регулирования. Таким образом, первый сумматор 2 осуществляет алгебраическое суммирование трех сигналов с соответствующими коэффициентами  С выхода второго сумматора 6 сигнал U5 подается на вход интегратора 5.
С выхода второго сумматора 6 сигнал U5 подается на вход интегратора 5.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Источники информации
1. Авторское свидетельство СССР 1631515, кл. G 05 B 11/01, 1991 (прототип).
Изобретение относится к автоматике и может быть использовано в системах управления астатическими объектами с запаздыванием. Технический результат изобретения заключается в упрощении системы без ухудшения качества работы. Система содержит два сумматора, регулятор, интегратор и объект регулирования. 1 ил.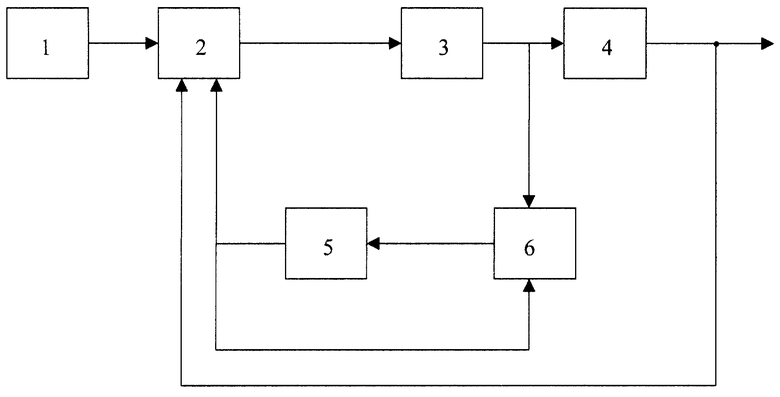
Система автоматического управления для астатических объектов с запаздыванием, содержащая задатчик, первый сумматор, регулятор, объект регулирования, интегратор, второй сумматор, причем выход задатчика связан с суммирующим входом первого сумматора, выход которого подключен к входу регулятора, выход регулятора соединен с входом объекта регулирования и суммирующим входом второго сумматора, выход объекта регулирования соединен со вторым вычитающим входом первого сумматора, выход второго сумматора соединен с входом интегратора, выход которого соединен с первым вычитающим входом первого сумматора, отличающаяся тем, что выход интегратора соединен с вычитающим входом второго сумматора.
| Система автоматического управления для астатических объектов с запаздыванием | 1989 |
|
SU1631515A1 |
| Система автоматического управления для объектов с запаздыванием | 1987 |
|
SU1534428A1 |
| Устройство для компенсации запаздывания | 1985 |
|
SU1325403A1 |
| US 4210853 А, 01.07.1980. | |||
