Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов с запаздыванием по управлению, причем параметры объекта - нестационарные, т.е. произвольно меняющиеся в известных пределах.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления /1/, содержащая объект регулирования, блок задания коэффициентов, последовательно соединенные блок суммирования, первый умножитель, интегратор, второй умножитель, выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования соединены с соответствующими выходами блока задания коэффициентов, выход блока суммирования подключен к первому и второму входу первого умножителя, и ко второму входу второго умножителя, выход первого умножителя через интегратор соединен с первым входом второго умножителя, выход которого подключен к входу объекта регулирования.
Недостатком этой системы является то, что она не может работать с объектами, обладающими запаздыванием по управлению.
Целью изобретения является расширение функциональных возможностей системы.
Поставленная цель достигается тем, что в системе, содержащей объект управления, блок задания коэффициентов, первый блок суммирования, выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы подключены к соответствующим входам первого блока суммирования, выход первого блока суммирования подключен к соответствующим входам первого умножителя, введены блок дополнительной задержки, робастный регулятор, выход первого умножителя соединен с первым входом робастного регулятора, второй вход которого подключен к выходу первого блока суммирования, третий вход робастного регулятора соединен с выходом блока дополнительной задержки, выход робастного регулятора подключен к входу блока дополнительной задержки и к входу объекта управления.
Вводя в систему блок дополнительной задержки, робастный регулятор, получают в системе новую функцию, которая заключается в том, что теперь система может работать с объектами с запаздыванием по управлению, что обеспечивает условие нормального функционирования объекта управления.
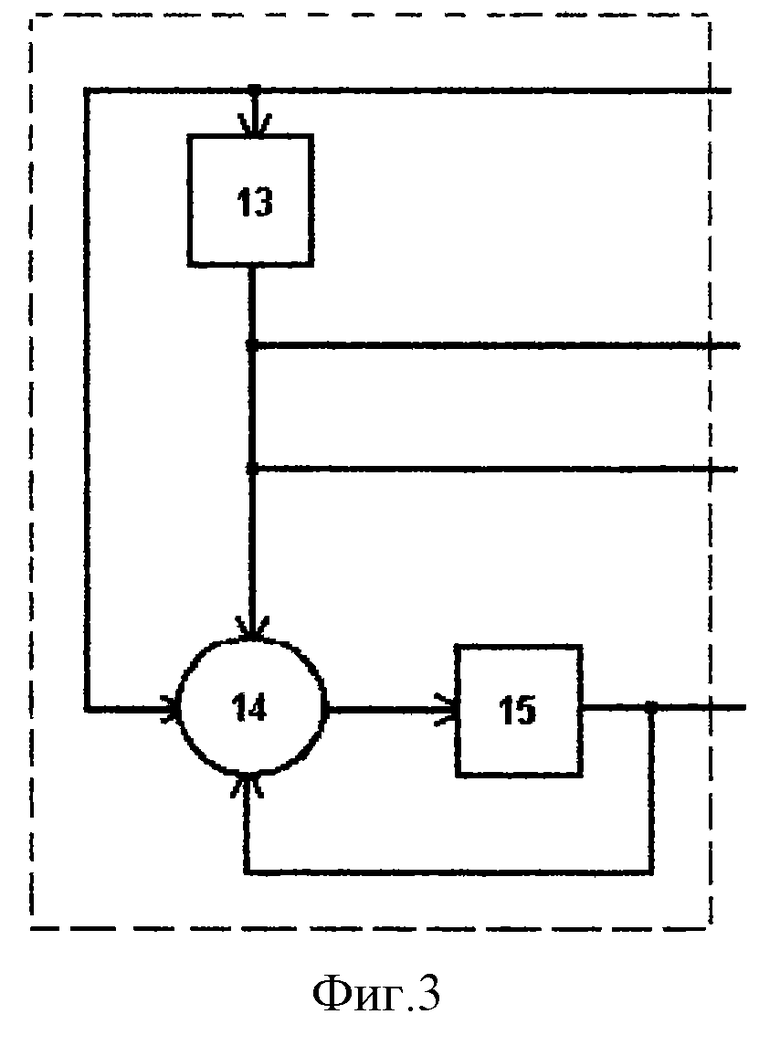
На фиг. 1 представлена блок-схема предлагаемой адаптивной системы управления; на фиг.2 - схема робастного регулятора; на фиг.3 - схема блока дополнительной задержки.
Система содержит объект управления 1, блок задания коэффициентов 2, первый блок суммирования 3, первый умножитель 4, робастный регулятор 5, блок дополнительной задержки 6.
Система функционирует следующим образом.
Сигналы с выходов объекта управления 1 поступают на соответствующие входы блока 2 задания коэффициентов, который представляет собой блок умножителей. В блоке 2 задания коэффициентов происходит умножение сигнала с i-го выхода объекта управления на постоянный коэффициент. Сигналы с выходов блока 2 задания коэффициентов поступают на соответствующие входы первого блока 3 суммирования, где складываются. Сигнал с выхода первого блока 3 суммирования приходит на первый и второй вход первого 4 умножителя, на первый вход второго блока 7 суммирования (соответствующий второму входу робастного регулятора 5), где складывается с сигналом, поступающим на второй вход второго блока 7 суммирования с выхода первого 15 интегратора (соответствующему выходу блока дополнительного 6 контура). Функциональная схема робастного регулятора 5 представлена на фиг.2. Функциональная схема блока дополнительной 6 задержки представлена на фиг.3. Сигнал с выхода второго 7 блока суммирования поступает на вход дискриминатора 9 знака. Сигнал с выхода дискриминатора 9 знака поступает на первый вход четвертого 11 умножителя, на первый вход третьего 12 блока суммирования и на второй вход второго 8 умножителя. На первый вход второго 8 умножителя поступает сигнал с выхода первого 4 умножителя. Второй вход четвертого 11 умножителя соединен с выходом третьего 10 умножителя. На первый и второй вход третьего 10 умножителя поступает сигнал с выхода блока 13 запаздывания (соответствующий выходу блока дополнительной 6 задержки). Сигнал с выхода четвертого 11 умножителя поступает на третий вход третьего 12 блока суммирования, где складывается с сигналом, поступающим с выхода второго 8 умножителя и с сигналом с выхода дискриминатора 9 знака. Сигнал с выхода третьего блока 12 суммирования (соответствующий выходу робастного 5 регулятора) соединен с блоком 13 запаздывания (соответствующий входу блока 6 дополнительной задержки) и с первым входом четвертого блока 14 суммирования. Сигнал с выхода блока 13 запаздывания поступает на оба входа третьего 10 умножителя и на второй вход четвертого 14 блока суммирования. На третий вход четвертого 14 блока суммирования поступает сигнал с выхода первого 15 интегратора. Сигнал с выхода четвертого 14 блока суммирования поступает на вход первого 15 интегратора, где интегрируется. Выход первого 15 интегратора соединен с вторым входом второго 7 блока суммирования. Сигнал с выхода третьего 12 блока суммирования (сигнал управления) поступает на вход объекта управления 1.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
ИСТОЧНИК ИНФОРМАЦИИ
1. Авторское свидетельство СССР 1019400, кл. G 05 B 13/02, 1985 (прототип).

Изобретение относится к системам автоматического управления и может быть использовано для линейных динамических объектов с запаздыванием по управлению, причем параметры объекта - произвольно меняющиеся параметры в замкнутых пределах. Технический результат заключается в расширении функциональных возможностей адаптивной системы управления за счет введения запаздывания по управлению. Система содержит блок задания коэффициентов, первый блок суммирования, первый умножитель, блок дополнительной задержки, робастный регулятор. 3 ил.
Адаптивная система управления, содержащая объект управления, блок задания коэффициентов, выходы объекта управления подключены к входам блока задания коэффициентов, выходы блока задания коэффициентов соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, отличающаяся тем, что в систему введены блок дополнительной задержки, робастный регулятор, выход первого умножителя соединен с первым входом робастного регулятора, второй вход робастного регулятора соединен с выходом первого блока суммирования, третий вход робастного регулятора подключен к первому выходу блока дополнительной задержки, четвертый вход робастного регулятора соединен со вторым выходом блока дополнительной задержки, выход робастного регулятора соединен с входом блока дополнительной задержки и с входом объекта управления.
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| АДАПТИВНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2000 |
|
RU2173871C1 |
| ВЫПРЯМИТЕЛЬ | 0 |
|
SU233071A1 |

