Изобретение относится к области авиации, а именно к летательным аппаратам вертикального взлета, способным производить взлет и посадку с площадок любой категории, в том числе при отсутствии аэродрома с взлетно-посадочной полосой.
Известны летательные аппараты, обеспечивающие вертикальные взлет и посадку, например самолет типа "летающее крыло", описанный в европейском патенте 439014, кл. В 64 С 29/04, опубл.31.07.1991г., содержат фюзеляж, имеющий осесимметричную обтекаемую форму, на котором закреплены два крыла, каждое из которых выполнено двухслойным. Аппарат снабжен воздушным каналом, образованным между крыльями, обшивкой и днищем фюзеляжа, а также щелевидными соплами и радиальной турбиной.
Недостатком этого самолета является наличие отдельного агрегата в виде радиальной турбины, следствием чего является низкий кпд.
К аналогу заявленного изобретения можно отнести самолет вертикального взлета и посадки, описанный во французском патенте 2281271, кл. В 64 С 29/04, опубл. 05.03.1976 г. У этого самолета подъемно-маршевые реактивные сопла обеспечивают истечение струй реактивных двигателей под дно фюзеляжа, при этом отвод горячих выхлопных газов, поднимающихся к фюзеляжу, обеспечивается отклоняющей заслонкой через нагнетательные щели.
Однако и этот самолет характеризуется низким кпд из-за недостаточного использования в режиме взлета аэродинамических свойств крыльев летательного аппарата.
Еще одним аналогом заявляемого изобретения является летательный аппарат по европейскому патенту 327371, кл. В 29 С 29/00, опубл. 09.08.1989г., снабженный круглым осевым крылом и реактивными соплами. Кроме того, в известном аппарате для увеличения подъемной силы выполнено отверстие для всасывания дополнительного потока воздуха в дополнение к газу высокого давления.
Недостатком и этого устройства является низкий кпд, обусловленный наличием в нем турбины.
Наиболее близким к заявляемому изобретению является летательный аппарат, описанный в европейском патенте 534611, кл. В 64 С 39/00, опубл. 31.03.1993г., содержащий фюзеляж и закрепленные на фюзеляже крылья, при этом в фюзеляже над и под каждым крылом выполнены отверстия, в фюзеляже размещен газодинамический тракт, состоящий из газоходного канала, в газоходном канале во входной и выходной областях этого канала расположены управляемые газодинамические заслонки, положение которых регулируется системой управления.
Наличие в этом аппарате турбины и механической системы изменения положения сегментов крыльев, а также большой вес аппарата обуславливают низкий кпд и его невысокую надежность при эксплуатации.
Целью изобретения является исключение вышеперечисленных недостатков.
Поставленная цель достигается тем, что в летательном аппарате вертикального взлета, содержащем фюзеляж, имеющий осесимметричную обтекаемую форму, и закрепленные на фюзеляже, по меньшей мере, два крыла, расположенных симметрично относительно вертикальной плоскости, проходящей через ось летательного аппарата, в фюзеляже над и под каждым крылом вдоль его внутренней кромки выполнено, по меньшей мере, по одному отверстию, в фюзеляже размещена газодинамическая система, состоящая, по меньшей мере, из одного газоходного канала, в газоходном канале во входной и выходной областях этого канала расположены управляемые газодинамические заслонки, при этом в кормовой части фюзеляжа выполнено, по меньшей мере, по одному выходному отверстию.
В верхней и нижней частях фюзеляжа соответственно над и под выходными отверстиями выполнены также инжекторные отверстия, образующие два ряда, расположенные вдоль внутренней кромки каждого крыла, сверху и снизу от нее.
Кроме того, газодинамическая система включает, по крайней мере, один газогенератор, один газоредуктор и один коллектор, которые размещены внутри фюзеляжа и жестко закреплены на его внутренней поверхности, а выход газогенератора соединен с входом газоходного канала, выход которого соединен с входом газоредуктора, полость которого через соответствующий инжекторный канал соединена с инжекторными отверстиями, а выход газоредуктора через, по крайней мере, один коллектор связан с соответствующими выходными отверстиями.
Кроме того, в фюзеляже размещен бортовой компьютер, через контроллер, предназначенный в ответ на внешнее управляющее воздействие для выдачи сигнала управления на управляемые газодинамические заслонки, при этом при вертикальном взлете для выдачи сигнала управления открытия всех газодинамических заслонок, кроме расположенных в кормовой части фюзеляжа, при горизонтальном движении для выдачи сигнала управления открытия всех газодинамических заслонок, расположенных в кормовой части фюзеляжа, и постепенного, по мере увеличения линейной скорости аппарата, для направления потоков воздуха на соответствующие плоскости крыльев, закрытия газодинамических заслонок, расположенных в области крыльев, а при посадке для выдачи сигнала управления постепенного закрытия газодинамических заслонок, расположенных в кормовой части фюзеляжа, и постепенного открытия газодинамических заслонок, расположенных в области крыльев.
Каждое крыло заявляемого аппарата вертикального взлета выполнено с аэродинамическим профилем в двух не параллельно секущих плоскостях по двум направлениям от внутренней кромки к внешней и от передней кромки к задней.
Кроме того, в аппарате крыло может быть выполнено составным и содержать две и/или более секций, при этом составные секции крыла размещены вдоль корпуса летательного аппарата или по окружности и соединены между собой перемычкой, связывающей составные секции в области соответственно внутренней и/или задней кромки крыла, при этом все составные секции крыла составляют единый аэродинамический профиль.
В частном случае выполнения аппарата отверстия, образующие один ряд, расположенный вдоль внутренней комки каждого крыла, имеют форму продольную или круглую.
В другом частном случае выполнения отверстия, образующие один ряд, расположенный вдоль внутренней кромки каждого крыла, выполнены с заданным шагом относительно друг друга.
Изобретение поясняется чертежами.
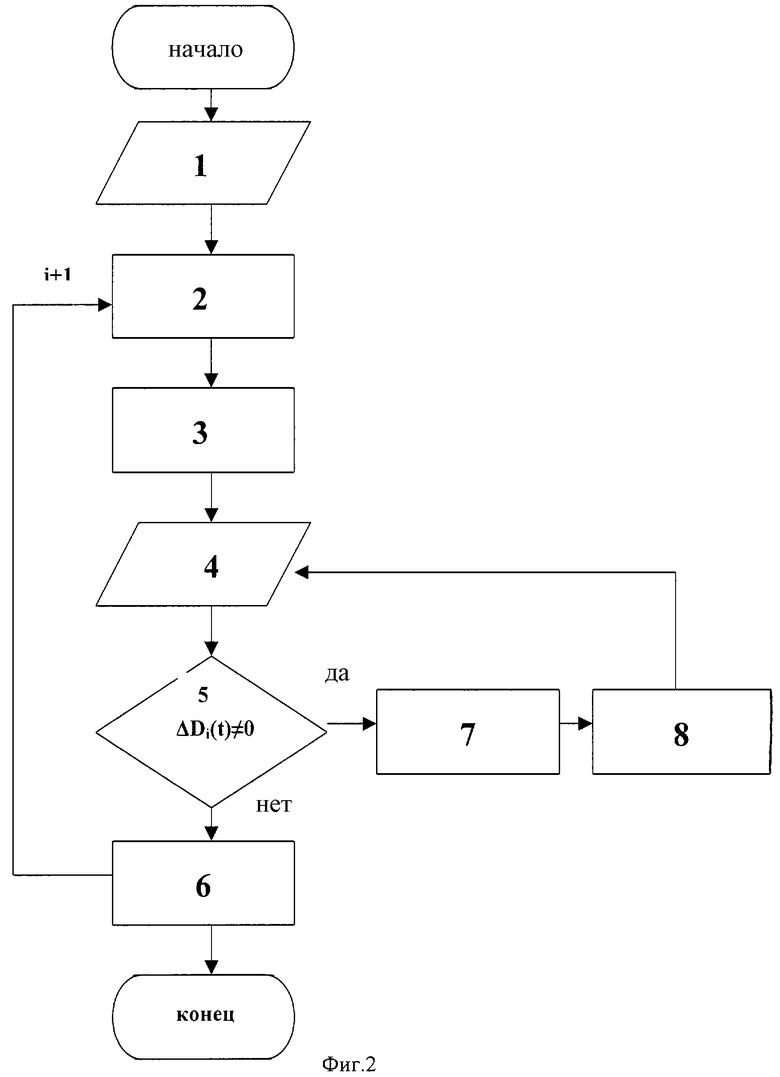
На фиг. 1 схематично показаны основные элементы летательного аппарата вертикального взлета, их расположение и взаимосвязь, а также конструктивные особенности выполнения отдельных элементов; на фиг.2 - алгоритм функционирования компьютера для управления газодинамической заслонкой.
На фиг.1 изображены:
а - вид летательного аппарата вертикального взлета в плане;
б - профиль крыла в сечении А-А;
в - вид летательного аппарата вертикального взлета в сечении Б-Б.
Летательный аппарат вертикального взлета содержит следующие основные элементы: фюзеляж 1, газогенераторы 2, крылья 3, газоходные каналы 4, газоредукторы 5, коллекторы 6, инжекторные отверстия 7, инжекторные каналы 8.
Кроме того, на фиг. 1 представлены профили крыла в сечениях А-А и Б-Б (поз. 9), внутренняя кромка крыла 10, передняя кромка крыла 11, управляемые газодинамические заслонки 12 и выходные отверстия 13.
В качестве бортового компьютера может быть использован, например, компьютер на базе микропроцессора типа КР580ВМ80, а в качестве контроллера может быть применен контроллер типа ВЕ48 или ВЕ51. Кроме этого, может быть применен контроллер типа FPC400 со встроенным промышленным компьютером FESTO АРС (процессор FPC 405/406).
Летательный аппарат функционирует следующим образом.
1. Режим предвзлетной подготовки.
Включается бортовой компьютер и все бортовые приборы контроля систем летательного аппарата. Проводится контроль готовности всех бортовых систем летательного аппарата. В случае полной готовности летательного аппарата к взлету принимается решение о взлете.
2. Режим взлета.
По команде "взлет" с бортового компьютера включаются газогенераторы 2 и выводятся в рабочий режим, одновременно через контроллер выдается сигнал открытия на все управляющие газодинамические заслонки 12, кроме заслонок, расположенных в кормовой части фюзеляжа; заслонки открываются.
По газоходным каналам 4 рабочий газ попадает в газоредукторы 5, в которых поддерживается его необходимое рабочее давление с помощью управляемых газодинамических заслонок 12. Коллекторы 6 формируют ламинарный газовый поток и направляют его из выходных отверстий 13 на внутренние кромки 10 крыльев 3;
газовый поток обтекает верхние и нижние поверхности крыльев 3, создавая на каждом крыле подъемную силу, прямо пропорциональную скорости набегающего на крыло газового потока и в соответствии с аэродинамическими характеристиками каждого крыла, которые определяются параметрами крыла в сечении Б-Б (поз. 9), причем на каждом крыле может быть создана разная подъемная сила, в зависимости от режима полета и необходимости совершения того или иного маневра летательного аппарата.
Подъемные силы отдельных крыльев также должны обеспечивать горизонтальное положение летательного аппарата на всех участках полета, начиная с подъема. Эта задача решается с помощью системы стабилизации положения летального аппарата и бортового компьютера, управляющего через контроллер управляемыми газодинамическими заслонками 12. Заслонки, находящиеся в кормовой части фюзеляжа, при вертикальном взлете закрыты до тех пор, пока не достигнута определенная высота.
Для увеличения объема рабочего газа и снижения его температуры полости газоредуктора 5 через инжекторные каналы 8 соединены с инжекторными отверстиями 7, через которые осуществляется всасывание наружного воздуха, его смешивание с рабочим газом и подача на внутренние кромки 10 крыльев 3, что дополнительно повышает кпд летательного аппарата.
3. Режим полета.
По мере того, как летательный аппарат достигает заданной высоты и появляется возможность горизонтального движения по заданному курсу, с бортового компьютера через контроллер на управляемые газодинамические заслонки 12 поступает сигнал открытия всех заслонок, находящихся в кормовой части фюзеляжа, и постепенного, по мере увеличения линейной скорости летательного аппарата, закрытия газодинамических заслонок, расположенных в области крыльев.
При этом подъемная сила каждого крыла будет определяться линейной скоростью набегания воздушного потока на переднюю кромку 11 каждого крыла и аэродинамическими характеристиками каждого крыла в сечении А-А (поз.9).
При необходимости совершения летательным аппаратом в процессе полета маневров (тангаж, крен, изменение курса полета) бортовой компьютер, отрабатывая соответствующую команду пилота, обеспечивает с помощью управляемых газодинамических заслонок различные соотношения подъемных сил на каждом крыле. Так, например, при необходимости совершения тангажа увеличивают (или уменьшают) подъемную силу крыльев, расположенных в кормовой части фюзеляжа. При этом летательный аппарат совершит тангажный разворот вниз или вверх соответственно. Аналогично можно изменять подъемную силу передних крыльев, заставляя летательный аппарат совершать тангажный разворот.
Если летательному аппарату необходимо совершить крен влево вокруг его продольной оси, то увеличивают подъемную силу крыльев, находящихся справа от продольной оси летательного аппарата. Крен вправо, соответственно обеспечивается увеличением подъемной силы крыльев, расположенных слева от продольной оси летательного аппарата.
Изменяя различные соотношения подъемных сил на каждом крыле, можно заставить летательный аппарат совершать любое необходимое движение в пространстве.
Изменение курса полета летательного аппарата можно производить путем увеличения или уменьшения скорости истечения газового потока из выходных отверстий, находящихся в кормовой части фюзеляжа. При необходимости поворота летательного аппарата вправо, увеличивают скорость истечения газового полтока из левых выходных отверстий за счет дополнительного открытия соответствующих газодинамических заслонок. При необходимости поворота летательного аппарата влево, увеличивают скорость истечения газового потока из правых выходных отверстий за счет дополнительного открытия соответствующих газодинамических заслонок. При изменении курса полета летательного аппарата дополнительно можно использовать его одновременный тангаж и крен; в процессе маневра при этом необходимо осуществлять определенное регулирование газодинамических заслонок, управляющих истечением газовых струй из кормовых выходных отверстий.
Все эти операции управления летательным аппаратом производит бортовой компьютер по командам пилота или автопилота (в случае беспилотного режима полета).
4. Режим посадки.
Посадка летательного аппарата осуществляется в результате его снижения и уменьшения линейной скорости полета. При этом по мере приближения летательного аппарата к месту посадки газодинамические заслонки выходных отверстий, находящихся в кормовой части фюзеляжа, постепенно закрываются, а газодинамические заслонки выходных отверстий, находящихся у внутренних кромок 10 крыльев 3, постепенно открываются, обеспечивая летательному аппарату необходимую подъемную силу при малых линейных скоростях полета.
В случае необходимости, эффект торможения летательного аппарата и его движения назад может быть обеспечен включением выходных отверстий, расположенных в носовой части фюзеляжа (на фиг.1 эти выходные отверстия не показаны).
Как показано на фиг.2, в блок 1 вводятся исходные данные (значения угла крена αкр, угла тангажа αтанг, угла курса αкурс, тип маневра, команды: "взлет", "посадка" и др.)
В блоке 2, в зависимости от исходных данных или заданного маневра, определяются необходимые состояния всех газодинамических заслонок. Причем, если заслонка не должна работать при совершении заданного маневра, она закрывается полностью.
В блоке 3 производится поиск функциональной зависимости эффективного диаметра каждой газодинамической заслонки Di=f(t) в реальном времени для каждого вида маневра.
В блоке 4 производится измерение эффективного диаметра каждой газодинамической заслонки Di(t)измер.
В блоке 5 осуществляется сравнение заданных значений эффективного диаметра каждой заслонки в каждый момент реального времени Di(t)зад с измеренным значением эффективного диаметра Di(t)измер каждой газодинамической заслонки:
ΔDi(t) = Di(t)зад-Di(t)измер
Если ΔDi(t)<0, то газодинамическая заслонка закрывается, если же ΔDi(t)>0, то открывается.
Управляющие команды J(t)упр<0 и J(t)упр>0 вырабатываются в блоке 7.
В блоке 8 производится отработка управляющего сигнала J(t)упр<0 (заслонка закрывается) и J(t)упр>0 (заслонка открывается). Если в блоке 5 будет получено условие ΔDi(t) = 0, то блок 6 формирует управляющий сигнал J(t)упр= 0, следовательно, заслонка заняла необходимое состояние и в блок 2 направляется сигнал на переход к настройке следующей заслонки (i+1) газодинамической заслонке. Когда все заслонки настроены и прошло время Δt, производится повторение всех операций сначала, пока из блока 1 не поступят новые исходные данные после завершения первоначального маневра.
Высокая маневренность летательного аппарата, возможность вертикального взлета и посадки позволяют ему осуществлять взлет и посадку с неподготовленных аэродромов, с малой взлетной площадки в труднодоступных местах.
В случае возникновения аварийной ситуации летательный аппарат может приземлиться или приводниться практически на любую неподготовленную площадку.
Применение кислородно-водородного газогенератора делает летательный аппарат высоко энергоемким и экологически чистым. Это позволит использовать его в качестве воздушного транспорта (пассажирского или грузового) как на внутренних маршрутах, так и на международных в качестве межконтинентальных аэробусов.
Анализ патентных и литературных данных показал, что совокупность указанных в изобретении признаков нигде ранее не описана и не известна, а именно данная совокупность обеспечивает функциональную полноту, законченность технического решения и достижения цели.
Очевидно, что предлагаемая предпочтительная реализация изобретения является одной из возможных, различные модификации которых без изменения сущности описываемого изобретения могут найти применение в разных областях производства и жизнедеятельности человека.
Изобретение относится к области авиации. Аппарат содержит фюзеляж и два крыла. В фюзеляже размещены газодинамическая система и управляемые газодинамические заслонки. В верхней и нижней частях фюзеляжа над и под выходными отверстиями выполнены инжекторные отверстия, образующие два ряда, расположенные вдоль внутренней кромки каждого крыла, сверху и снизу от нее. Предусмотрено использование бортового компьютера для управления газодинамическими заслонками. Изобретение направлено на повышение кпд. 3 з.п. ф-лы, 2 ил.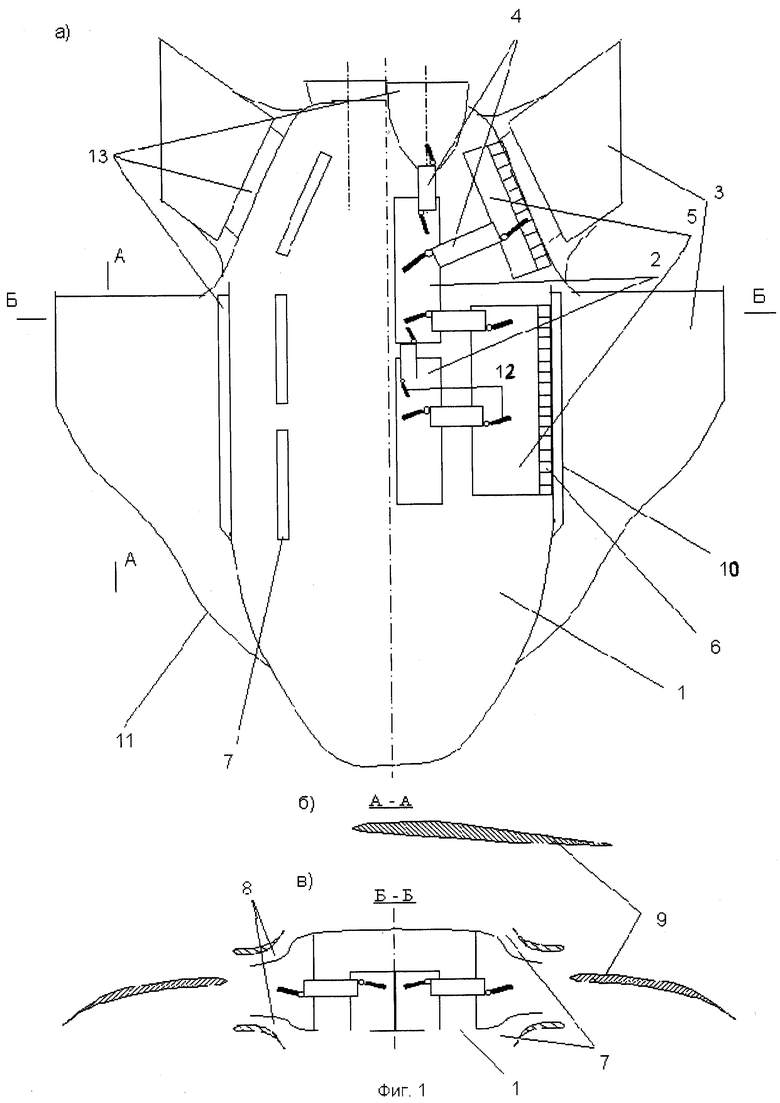
| Линейный компенсатор типа труба в трубе | 1975 |
|
SU534611A1 |
| Система управления летательнымАппАРАТОМ ВЕРТиКАльНОгО ВзлЕТАи пОСАдКи | 1974 |
|
SU799636A3 |
| US 3785592 А, 15.01.1974 | |||
| US 3179353 А, 20.04.1965. | |||

