154) СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ
Однако использование традиционных органов управления не обеспечивает достаточной управляемости на режимах вертикального взлета и переходных режимах,
Целью изобретения является улучшение управляемости летательным аппаратом при вертикальном взлете, на переходных режимах и в горизонтальном полете,
Указанная цель достигается тем, что каждый закрьшок соединен с силовым приводом, а органы управления содержат вторую ручку управлеьшя,
щарнирно закрепленную к фюзеляжу с возможностью поворота относительно оси, расположенной параллельно поперечной оси летательного аппарата, и относительно продольной оси ручки, а в проводке управления от этой ручки установлен рычажньй .суммирую пщй механизм, вьтолненный в виде двуплечей качалки, на одном конце которой относительно ее опорного шарнира установлена трехплечая качалка, а другой конец соединен с поворотным относительно поперечной оси концом ручки управления, причем соосно опорному шарниру двуплечей качалки установлена качалка, соединенная тягами с концом ручки управления, поворотны относительно продольной оси ручки, и с средним плечом трехплечей качалки, крайние плечи которой соединены проводкой управления: одно с силовыми приводами поворота передних закрьков, а другое с силовыми приводами поворота задних закрылков.
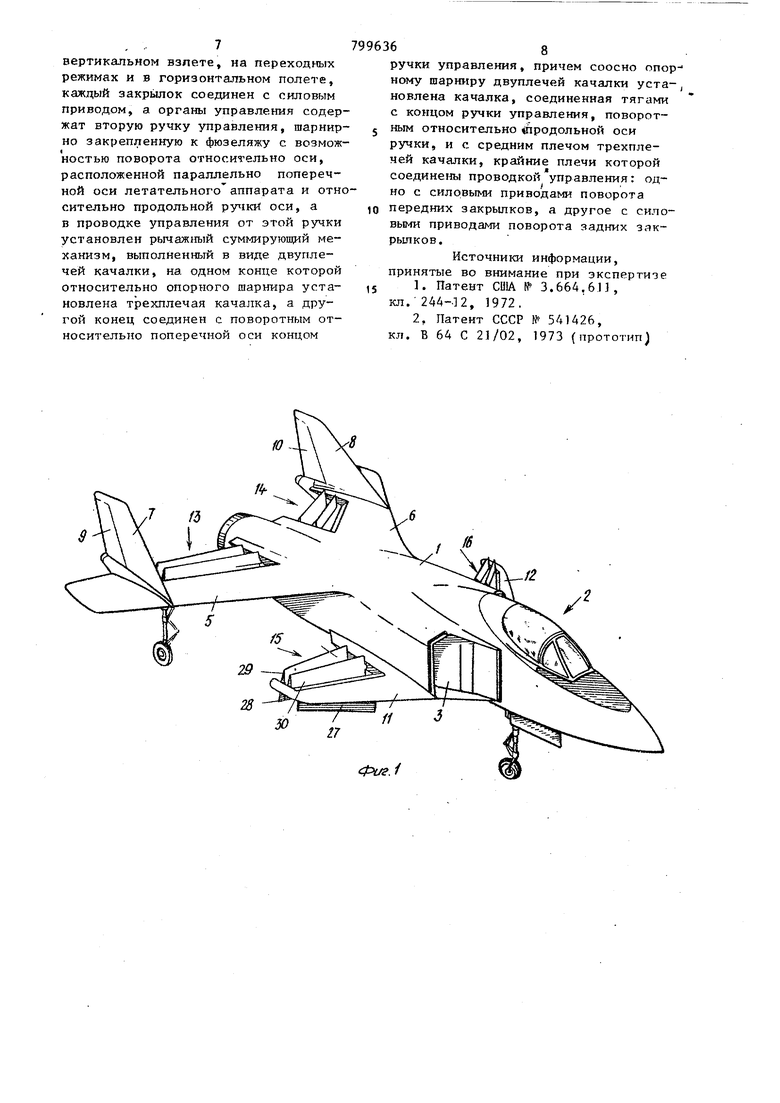
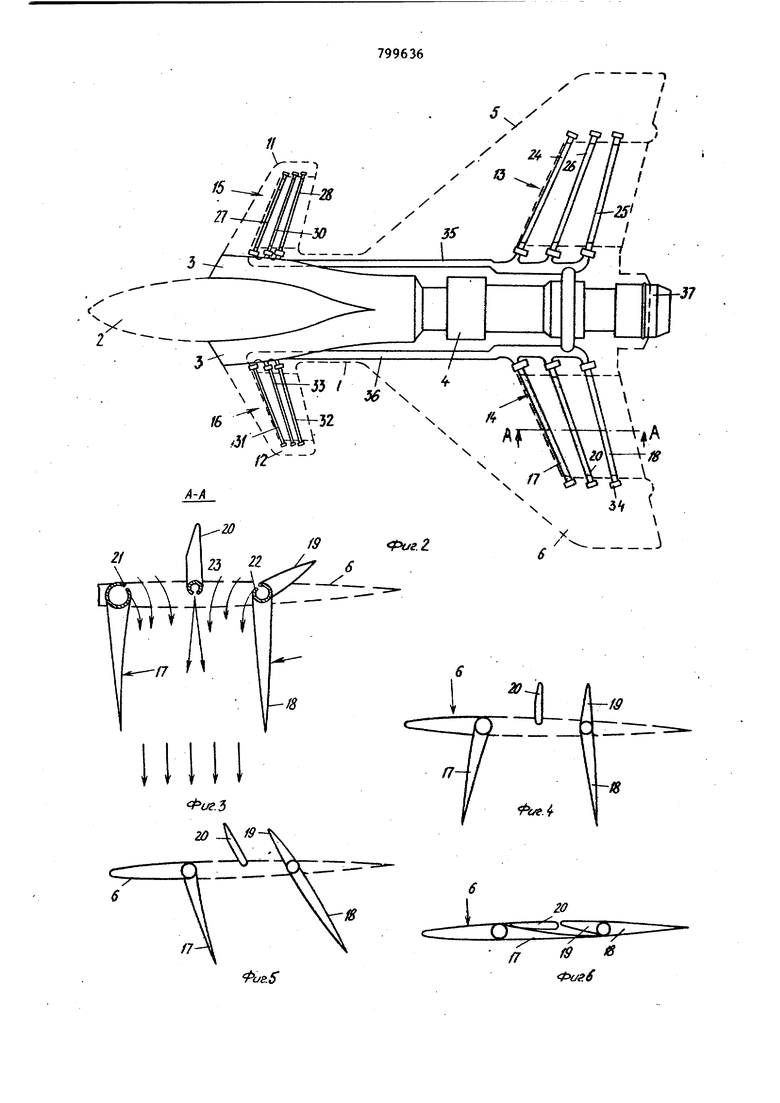
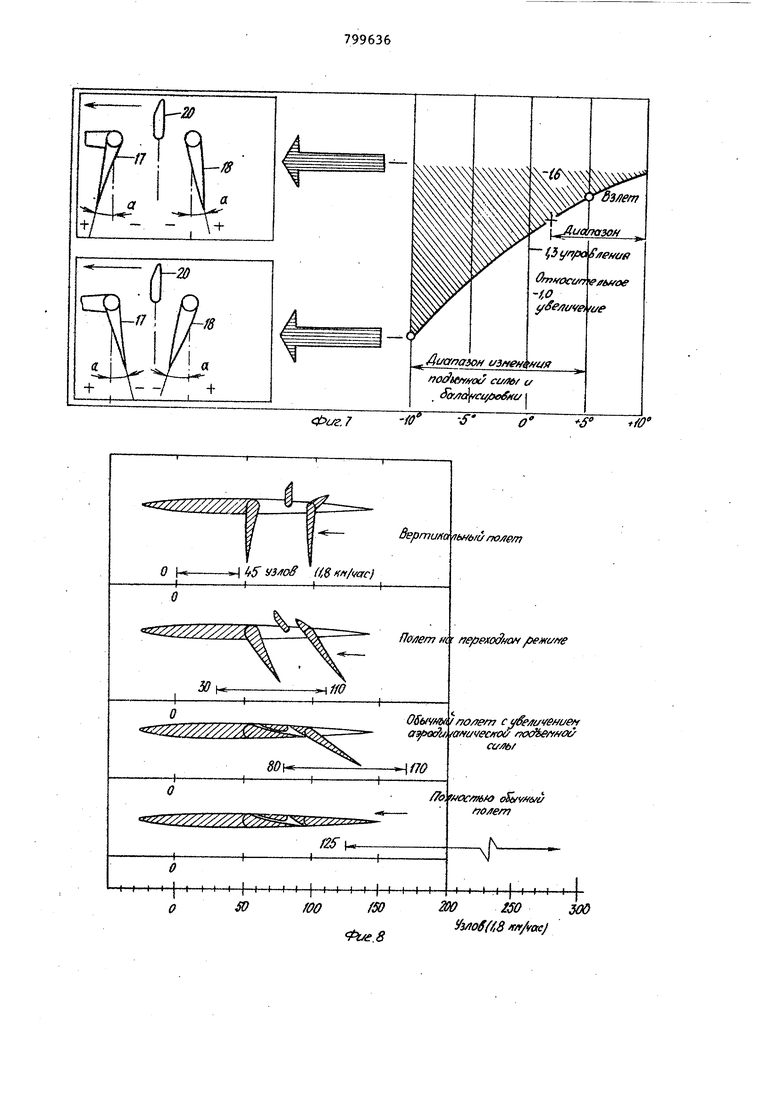
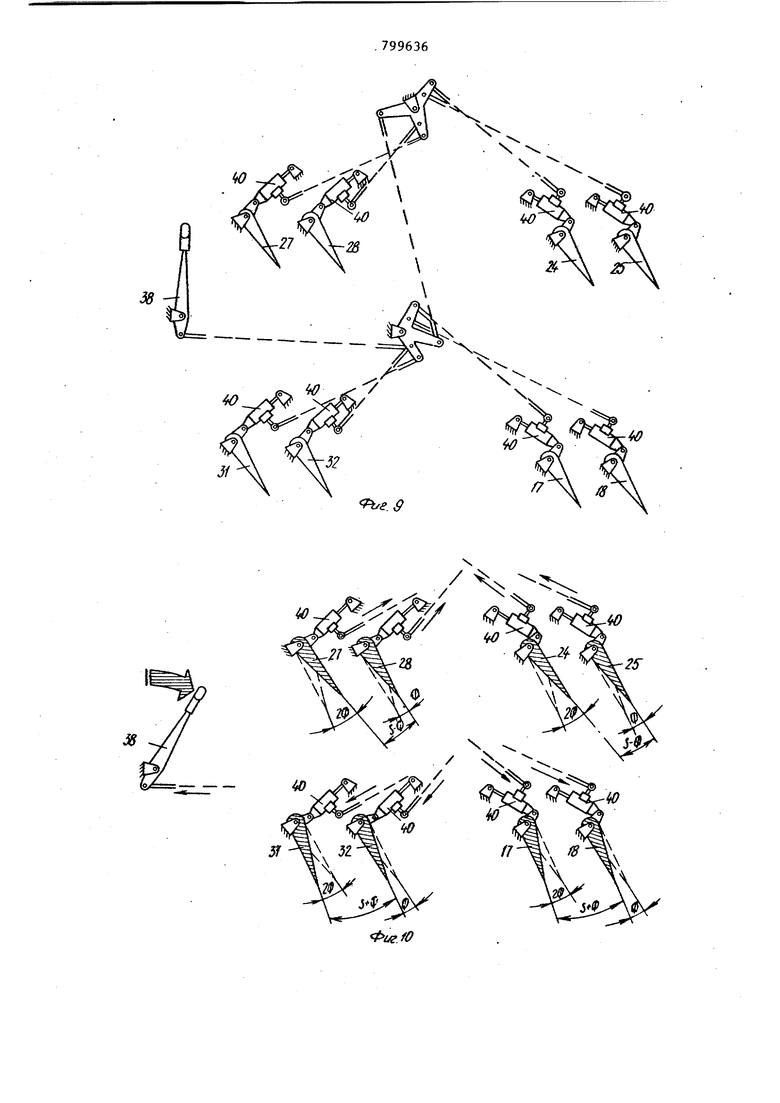
На фиг.1 изображен вертикально взлетающий летательный аппарат е закры ками,отклоненными в положение вертикального взлета; на фиг, 2-схема подачи газа от силовой установки к эжекторам крЬшьев и оперения, вид в плане; на фиг.З - разрез А-А на фиг.2; на фиг.4 - то же, что и на фиг.З, в положении закрылков для вертикального взлета на фиг.,5 - то же, -что и на фиг.З, на переходных режимах полета; на фиг.6 то же, что и на фиг.З, в горизонтальном полете; на фиг.7 график примерного изменения подъемной силы при вертикальном взлете в зависимости от угла отклонения закрылков; на .8 - график примерного диапазона воздушной скорости по режимам полета от вертикального взлета-до горизонтального полета на фиг.9 - схема проводки ручного
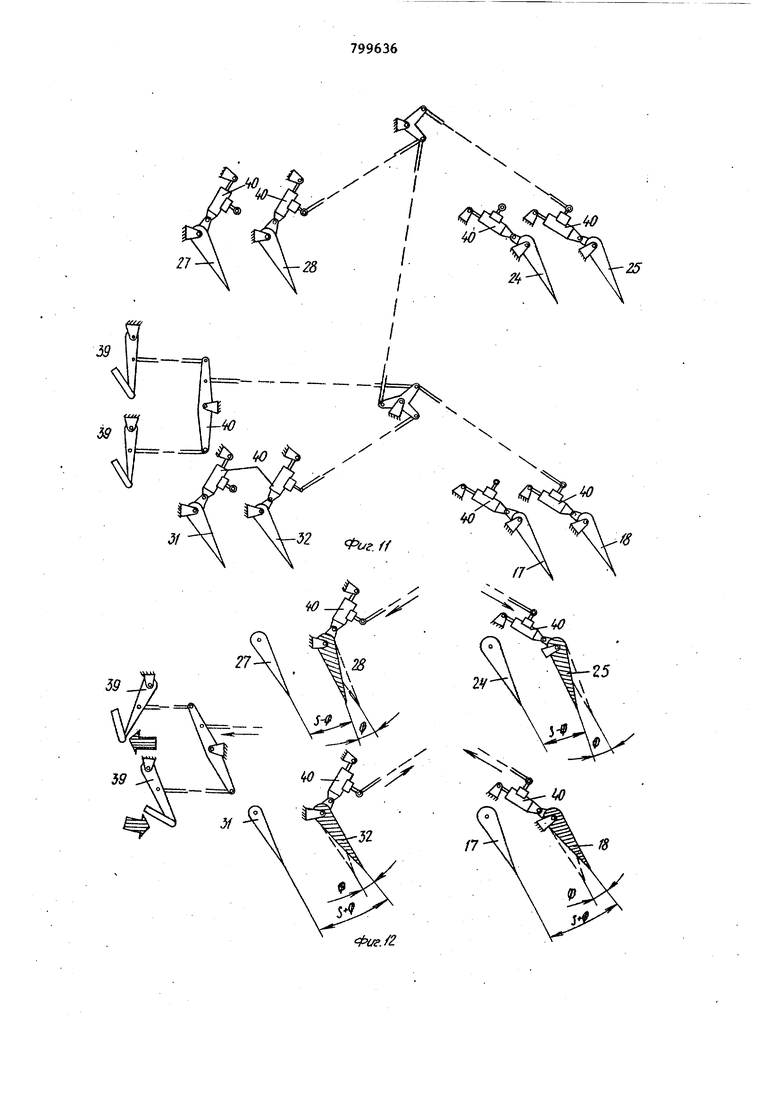
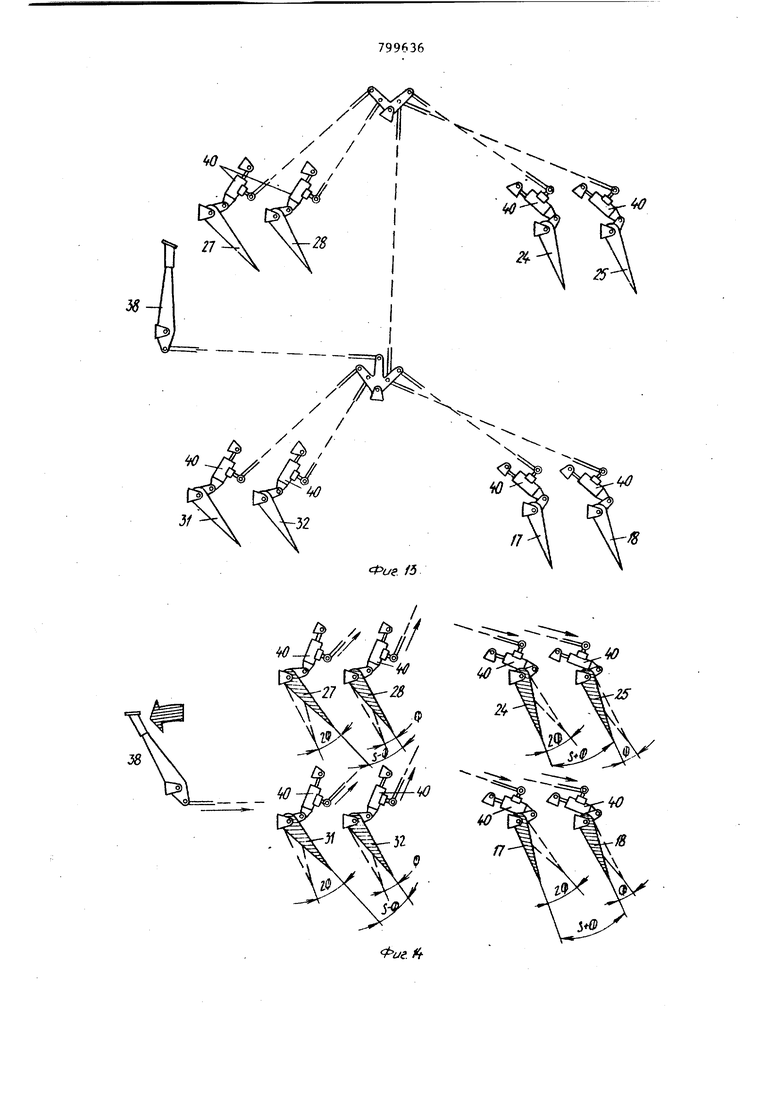
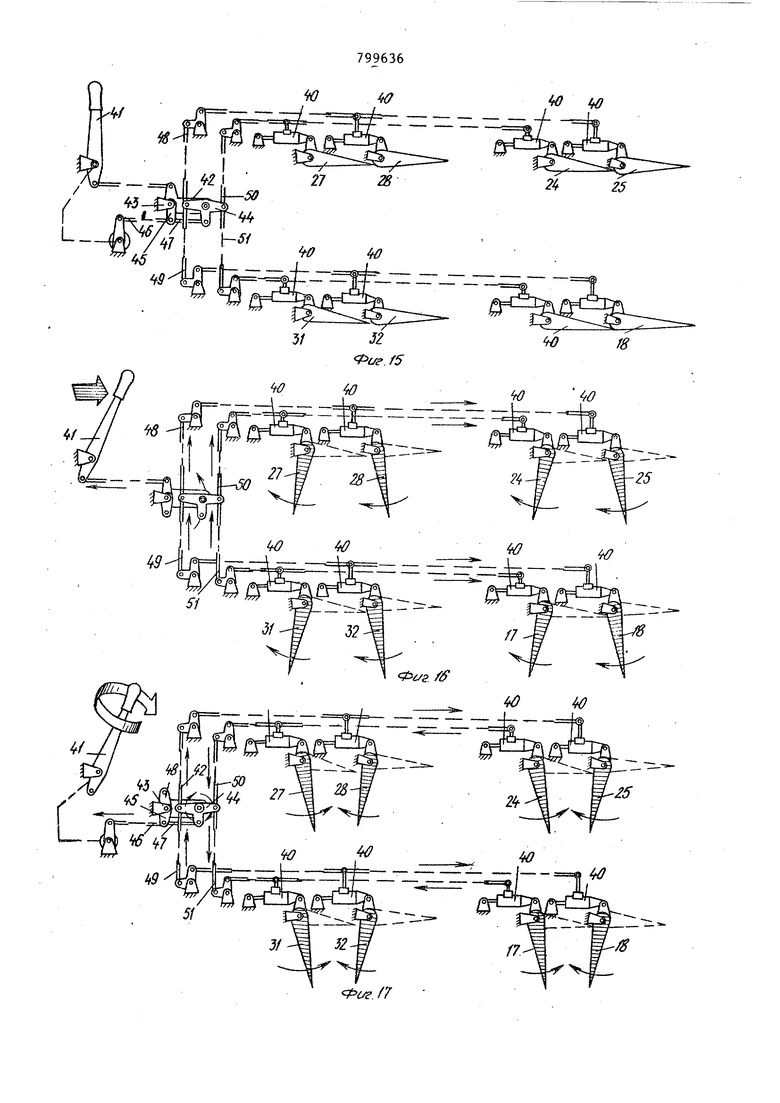
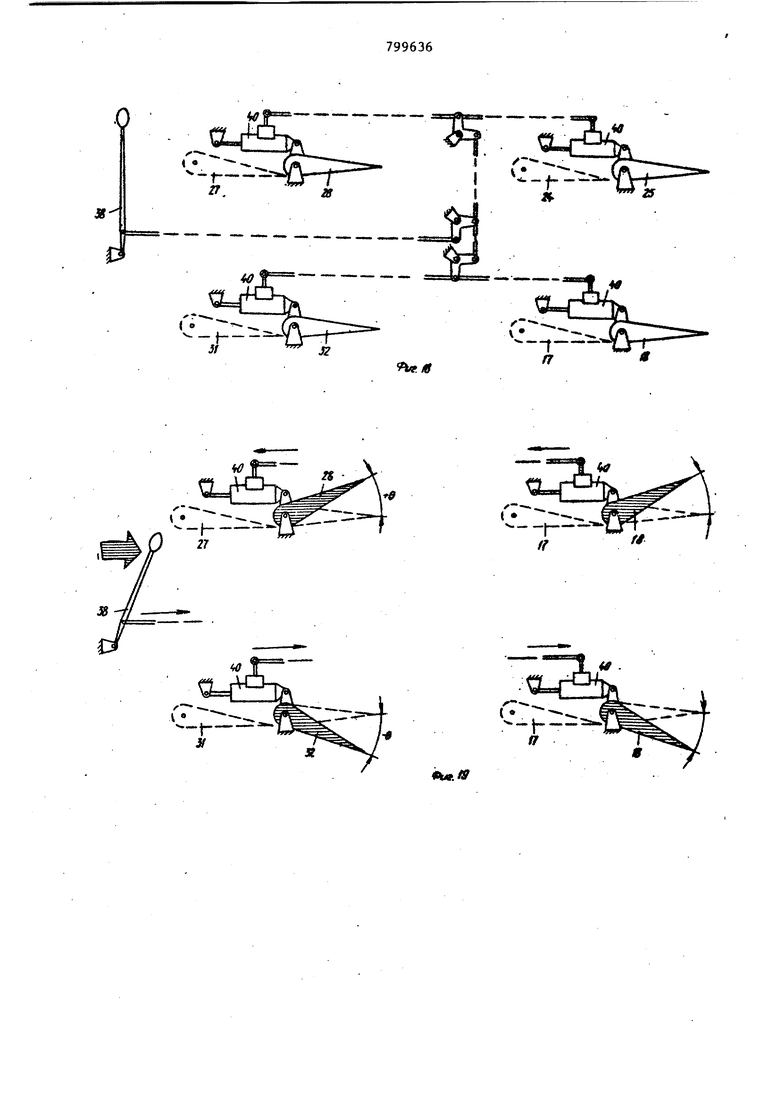
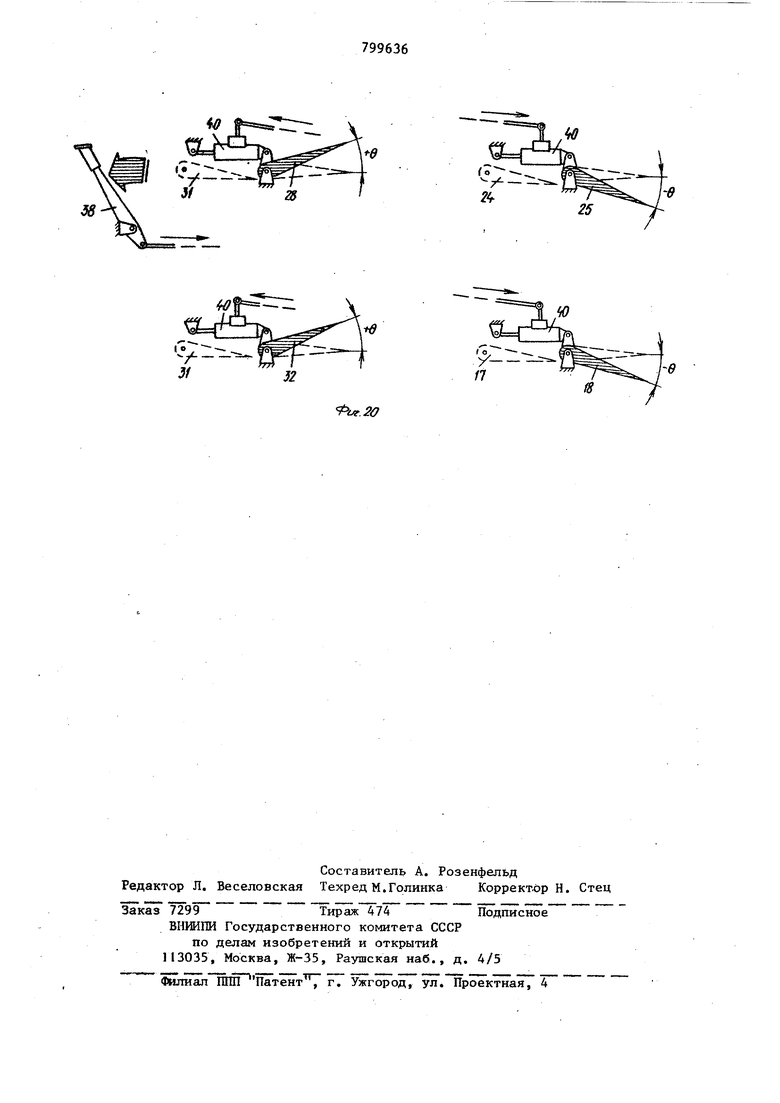
управления при вертикальном взлете и на переходных режимах в нейтральном положении; на фиг. 10 - то же, что и на фиг.9, в положении правого крена; на фиг.II - схема проводки ножного управления по курсу при вертикальном взлете и на переходных режимах в нейтральном положении; на фиг.12 - то же, что и на фиг.II, в положении правого разворота; на фиг,13 - схема проводки ручного управления по тангажу при вертикальном взлете и на переходных режимах в нейтральном положении; на фиг.4то же, что и на фиг.13, в положении пикирования; на фиг.15 - схема Провокз- управления открытием закрылков эжекторов в положении закрылков Убрано, горизонтальный полет; на фиг.)6 - то же, что и на фиг.15, в положении закрылков Открыто, вертикальный взлет; на фиг.17 - то же, чт и на фиг.16, при изменении величины вертикальной тяги; на фиг.18 - схема ручного управления в горизонтальном полете; на фиг.19 - то же, что и на фиг.18, в положении правого крена; на фиг.20 - то же, что и на фиг.18, в положении пикирования,
Летательный аппарат вертикального взлета и посадки включает в себя фюзеляж 1 5 в носовой части которого расположена кабина 2 пилотов и воздухсзабор шки 3. Двигатель 4 расположен вргутри .фюзеляжа. Летательный аппарат выполнен по схеме утка, крылья 5 и 6 расположены в хвостовой части фюзеляжа. На крыльях установлены кили 7 и 8 с рулями 9 и 10 направления, Стабилизаторы Пи 12 расположены в носовой части фюзеляжа. На крьшьях 5,6 и стабилизаторах 11,12 вьтолнены эжекторы 13,14,15,16 соответственно.
Эжектор 14 крьша 6 состоит из переднего закрьшка 17, заднего закрьшк:а 18 с. отклоняемой передней частью 19 и щитка 20, в которых выполнены щелевые сопла 21,22 и 23 соответственно.
Эжектор 13 крьша 5 устроен аналогично и включает закрылки 24,25 и щиток 26.
Эжектор 15 стабилизатора 11 состоит из переднего закрылка 27, заднего закрьшка 28 с отклоняемой передней частью 29 и щитка 30, в которых выполнеты щелевые сопла. Эжектор 16 стабилизатора 12 устроен аналогично и включает закрылю 31,32 и щиток 33. Все закрылки и щитки закреплены к конструкции с помощью опорных подшипников ЗА. Подвод газа от двигателя 4 к щеле вым соплам закрылков и щитков осуществляется с помощью коллекторов 35 и 36. В горизонтальном полете газ выбрасывается через сопло 37. Система ручного управления включает ручку управления 38 и педали 39, соединенные проводкой управления с силовыми приводами 40 поворота закрылков. Каждый закрылок эжектора и стабилизатора соединен с индивидуаль ным силовым приводом 40, причем эти приводы обеспечивают поворот закрылков каждого эжектора как в одну стор ну, так и в разные друг относительно друга. Система ручного управления ср1абже на второй ручкой управления 41, кото рая закреплена к фюзеляжу 1 с возмож ностью поворота относительно оси, попе перечной продольной оси летательного аппарата, и относительно продольной оси ручки 41 (см.фиг. 17). В проводке управлеш1я от ручки 41 установлен рычажньй суммирующий механизм, выпoлнeнfIый в виде двуплечей качалки 42, на одном конце которой относительно опорного шарнира 43 установлена трехплечая качалка 44. Другой конец качалки 42 соединен с концом ручки 4 поворотным относитель но поперечной оси. Соосно опорному шарштру 43 устано лена качалка 45, соединенная тягами 46 и 47 с концом ручки 41, поворотным относительно продольной оси ручки, и с средним плечом трехплечей качалки 44. Одно крайнее плечо качалки 44 соединено проводкой управления 48 и 49 с силовыми приводами 40 поворота задних закрылков, а другое проводкой управления 50 и 51 с силовы ми приводами 40 поворота передних за- 50 крылков. Система работает следующим образом. При вертикальном взлете летательного аппарата закрылки устанавливают- 55 ся ручкой 41 в вертикальное положе- ние (см.фиг.З,16). В щелевые сопла закрылков и щитков по коллекторам 35 и 36 подаются выхлопные газы турбореактивнрго двигателя 4. Выходящий из щелевых сопел газ в эдекторах 13 16 засасывает окружакядий воздух и образует вертикальный поток, создаюп ий подъемную силу. Управление положением летательного аппарата на всех режимах осуществляется перемещением органов управления ручки 38 и педалей 39, а величина вертикальной тяги на режиме вертикального взлета изменяется поворотом ручки 41. При отклонении органов управления закрылки поворачиваются, при этом одповременный поворот переднего и заднего закрылков эжектора в одну сторо}гу вызывает наклон вектора тяги в сторону попорота закрылков см.фиг. 5,8,. При перемещении переднего и заднего закрылков в противоположнь1е стоpoitbi изменяется тяга эжектора см. фиг, 7 при увеличении угла раскрытия тяга увеличивается, при уменьшении угла тяга уменьшается. При дифференциальном отклонении закрылков на разных эжекторах изменяется балансировка летательного аппарата в пределах, необходимых для выполнения маневра, например пикирования (см.фиг.14). В горизонтальном полете управлеьгие летательным аппаратом осуществляется отклонением только зад1шх закрьшков 18,25,28,32 на небольшой угол {см.фиг.18,19,20). Формула изобретения Система упраапения летательным ппаратом вертикального взлета и осадки, крылья которого имеют эжекор, выполненный в ви,це двух, послеовательно расположенных вдоль хоры поворотных вниз закрылков с щелеым соплом для вьщува газа на их бращенную друг к другу поверхность ри отклоненном положении, соответствующем вертикальному или переходному режимам полета, причем задний закрылок выполнен в виде отклоняемой вверх-вниз хвостовой части крыла, а органы управления выполнены в виде ручки управления и педапой, соединенных проводкой управления с силовыми приводами поворота закрылков, отличающая ся тем, что, с целью улучшения управляемости привертикальном взлете, на переходных режимах и в горизонтальном полете, каждый закрылок соединен с силовым приводом, а органы управления содер жат вторую ручку управления, шарнир но закрепленную к фюзеляжу с возмож ностью поворота относительно оси, расположенной параллельно поперечной оси летательного аппарата и отн сительно продольной оси, а в проводке управления от этой ручки установлен рьгчаж1гый суммирующий механизм, выполненный в виде двуплечей качалки, на, одном конце которой относительно опорного шарнира установлена трехплечая качалка, а другой конец соединен с поворотным относительно поперечной оси концом 68 ручки управления, причем соосно опор- ному шарниру двуплечей качалки уста-, новлена качалка, соединенная тягами с концом ручки управления, поворотным относительно «продольной оси ручки, и с средним плечом трехплечей качалки, крайние плечи которой соединены проводкой управления: одно с силовыми приводами поворота передних закрылков, а другое с силовыми приводами поворота задних закрылков. Источники информации, принятые во внимание при экспертизе I. Патент СИ1А № 3.664.6П, кл.244-12, 1972. 2, Патент СССР № 541426, кл. В 64 С 21/02, 1973 (прототипJ
Фиг.1 тг Фаг. 7 -fO -Sо 6 /ff
Bepmu/ia по/ге/п
45 УЗ/foS ((в )
Q
f2S 4-1-I I I I-h-l-I { I I-I I ) II I I I I 0SOfOOfSO
Полет ffi neppxo ffOM (
05ычм /(f7O/J m сyffe/Kfvefft/eff /wt Si /y-w%/
aStfWu
/7ojf acfl№fo f76/refn
Фие.8 II-I I J л-л . -I Г 1 I 200150300 ,$ fffr/racl f.
w
Фиг./г
Фиг. /3
Фие.( c.f ifO
О
х--.„
«ь.
S8
Аг-.Л
/7
