Изобретение относится к машиностроению и строительной индустрии, а именно к эксцентриковым узлам для установки модулей на вакуумном корпусе термоядерного реактора.
Известен регулируемый эксцентриковый узел, содержащий установленные на валу эксцентрик с клиньями и приводной диск, последний выполнен с торцевым, охватывающим вал цилиндрическим выступом, контактирующим своей наружной поверхностью с поверхностью клиньев, и образующая наружной поверхности которого расположена под углом к оси узла (см. авт. свид. 947493, МПК F 16 C 3/28, 1980 г. Регулируемый эксцентриковый узел).
Недостаток указанного эксцентрикового узла заключается в том, что он не может быть использован в качестве опорного устройства в случае, когда направление оси закрепляемой детали, например модуля, не совпадает с направлением оси детали крепления, например, вакуумной камеры.
Наиболее близким по совокупности существенных признаков к предлагаемому изобретению является эксцентриковый узел содержащий кольцевой эксцентрик, опору и прижимную деталь (см. авт. свид. 200354, МПК F 16 C 32/00, 1966 г. Эксцентриковая опора).
Опора содержит опорный палец, через который проходит винт для подъема и опускания элемента, например катушки, имеющей глухое отверстие для захода пальца. Кольцевой эксцентрик выполнен как одно целое с опорным пальцем и прижимной деталью.
Недостаток данного эксцентрикового узла заключается в том, что он не может быть использован в качестве опорного устройства для объектов, у которых направление оси закрепляемой детали, например модуля, не совпадает с направлением оси детали крепления, например вакуумной камеры.
Задача, на решение которой направлено настоящее изобретение, является расширение технологических возможностей эксцентрикового узла.
Технический результат, который может быть получен при осуществлении настоящего изобретения, заключается в повышении надежности и точности регулировки установки опор при сборке крупногабаритных конструкций, что позволяет использовать при монтажных работах разъемные механические соединения, позволяет обеспечить компенсацию погрешностей при монтаже крупногабаритных узлов с соединяемыми узлами до ± 10 мм при осевых ошибках; ± 5 мм при боковых несовпадениях осей; а также угловые ошибки ± 25 мрад( + 1,43o).
Указанная задача решается за счет того, что эксцентриковый узел, содержащий кольцевой эксцентрик, опору и прижимную деталь, снабжен внешним эксцентриком в виде диска с глухим отверстием, в нем установлен кольцевой эксцентрик, при этом эксцентриситеты обоих эксцентриков равны между собой, а опора снабжена фланцем, который закреплен прижимной деталью в стакане, установленном в кольцевом эксцентрике, причем ось фланца образует с осью опоры острый угол, а цилиндрическая полость стакана выполнена наклонной относительно его оси и имеет угол наклона, равный углу между осями опоры и фланца.
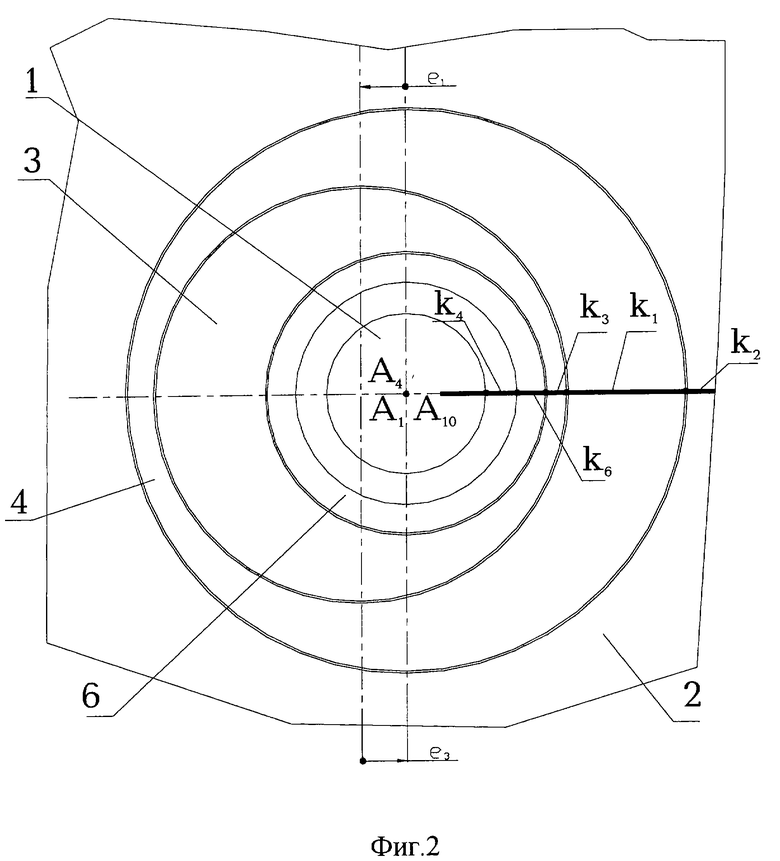
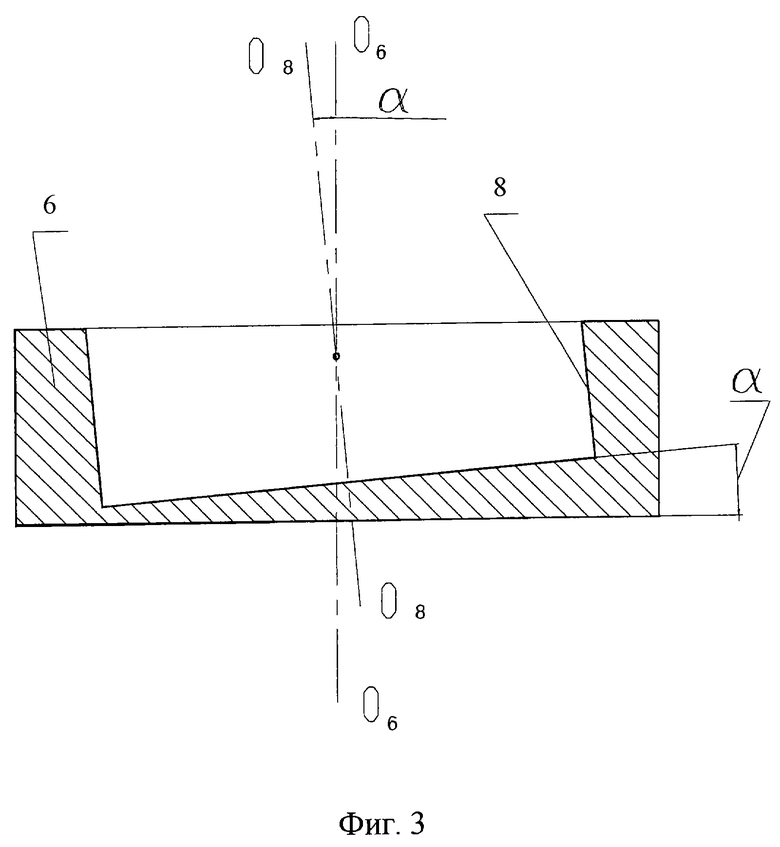
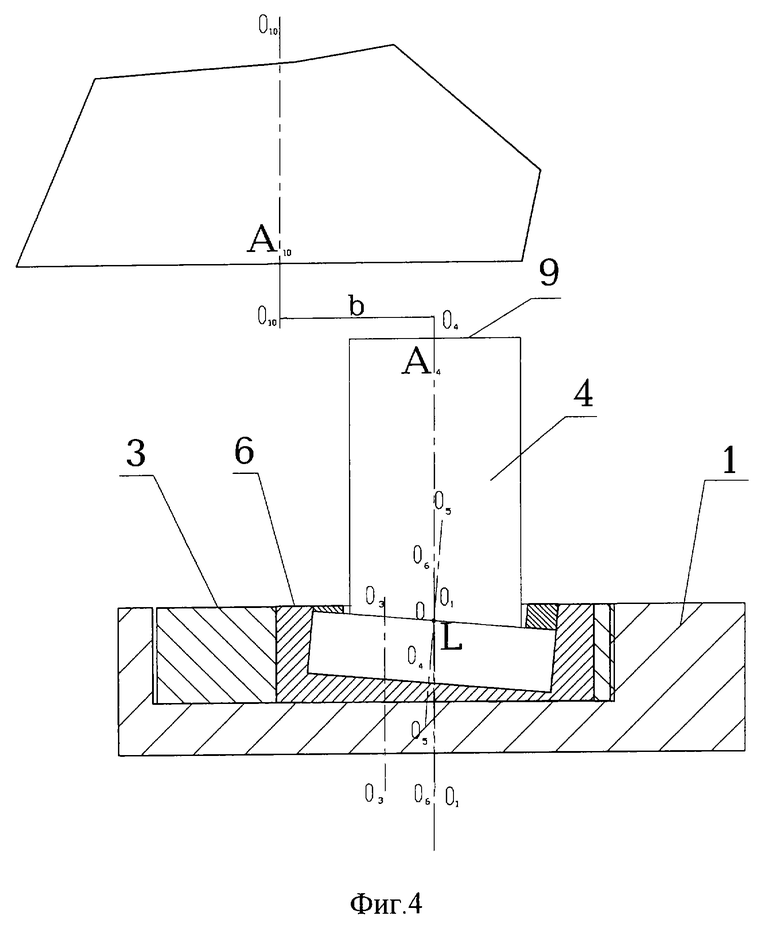
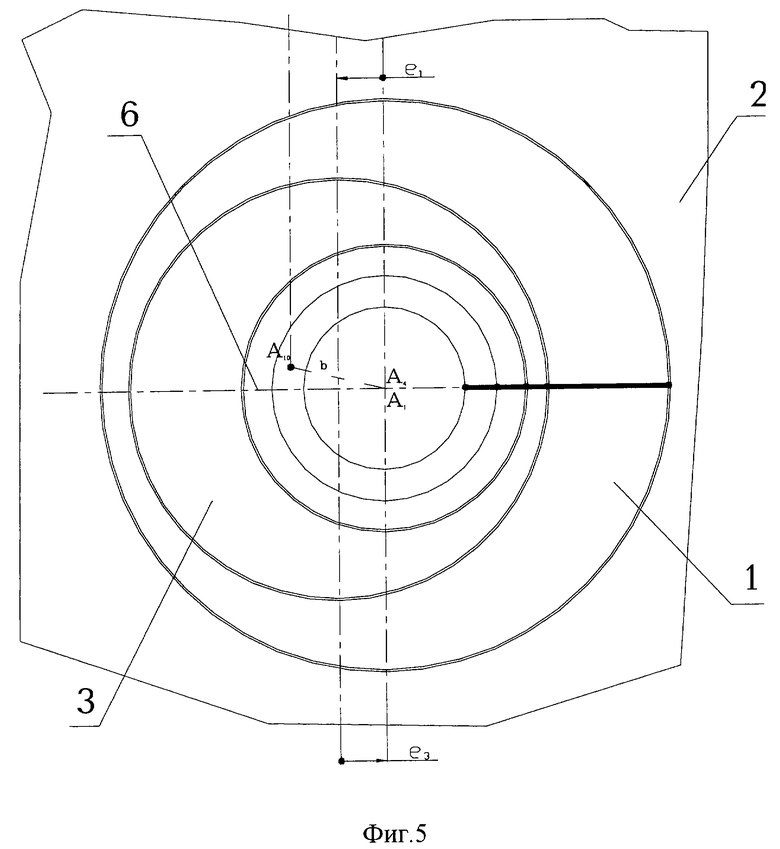
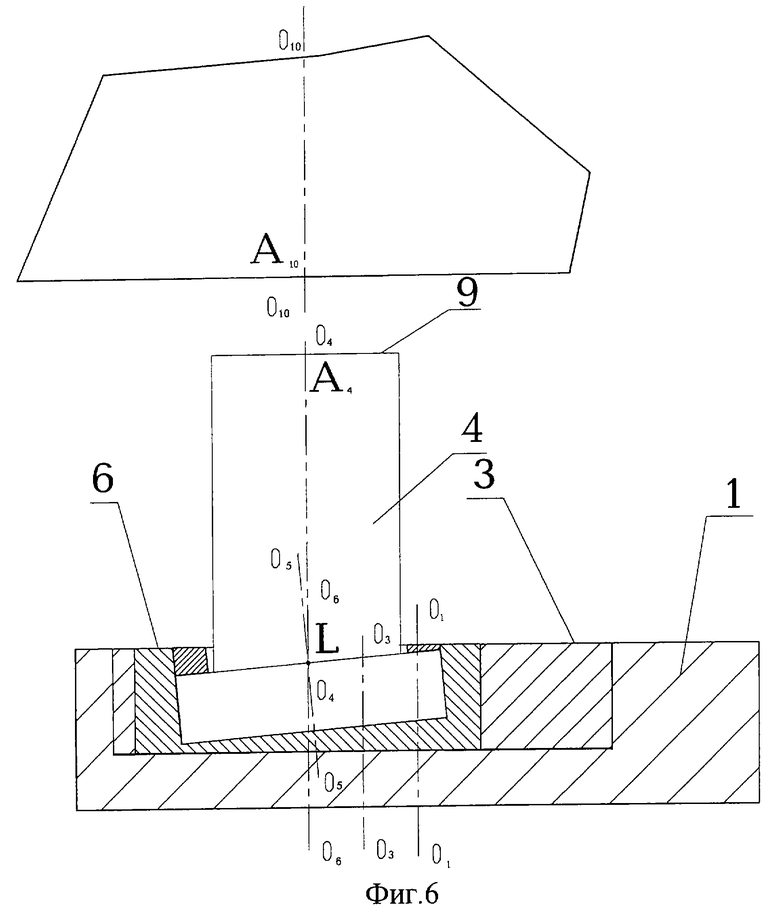
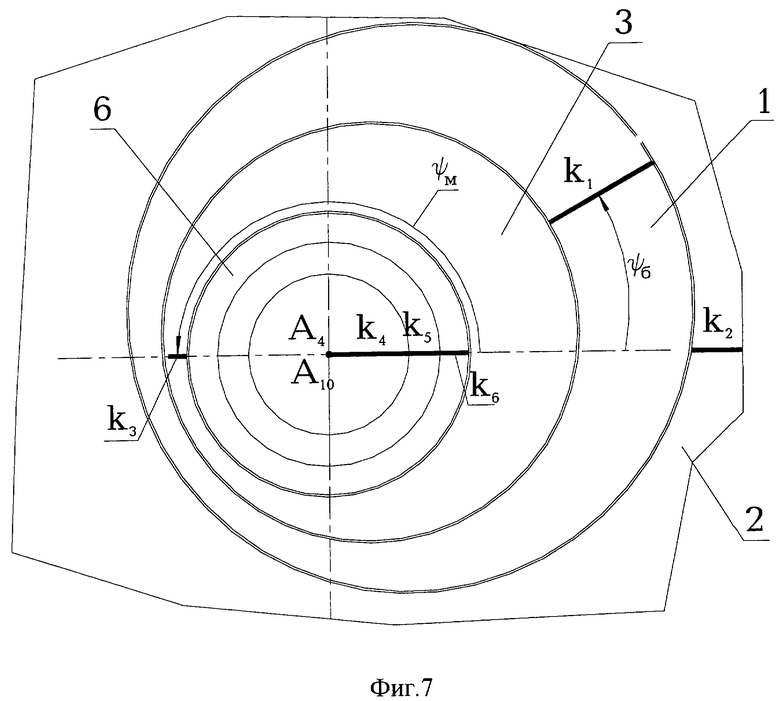
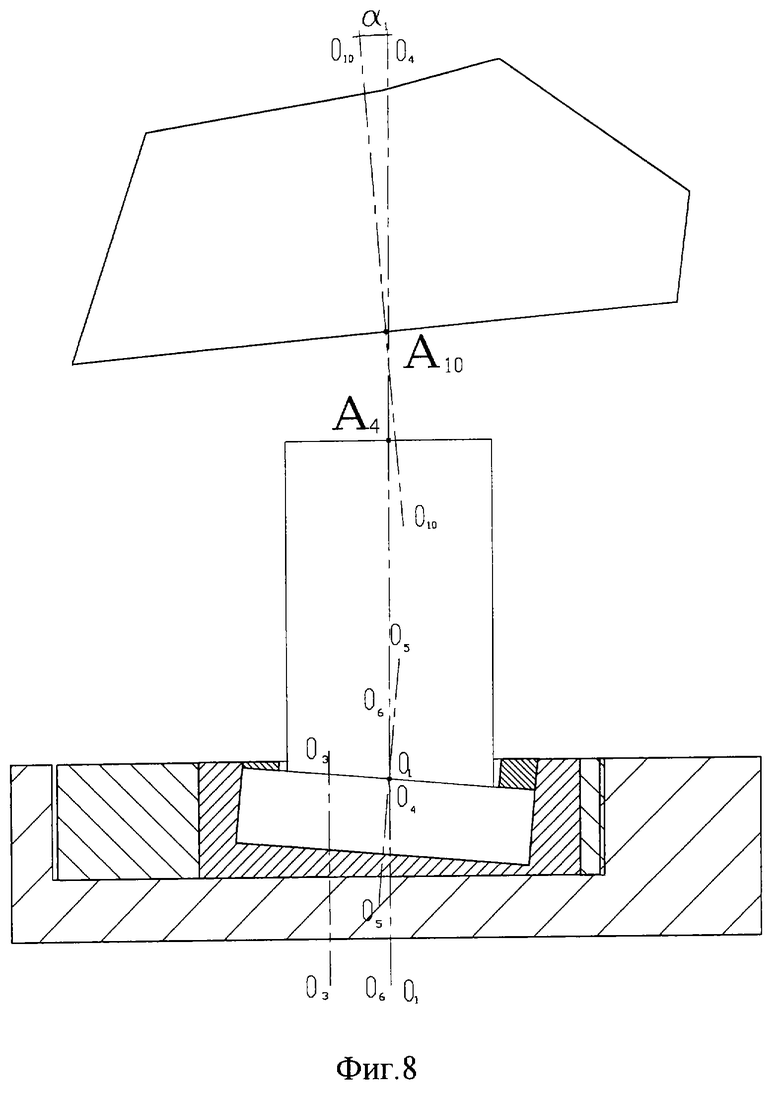
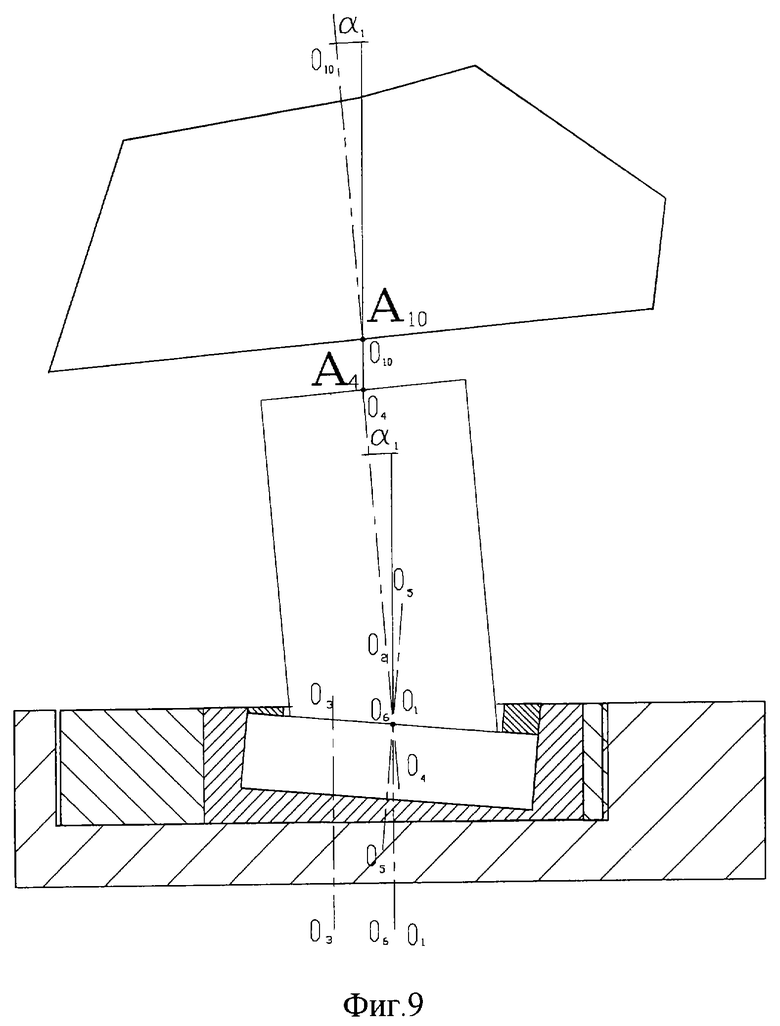
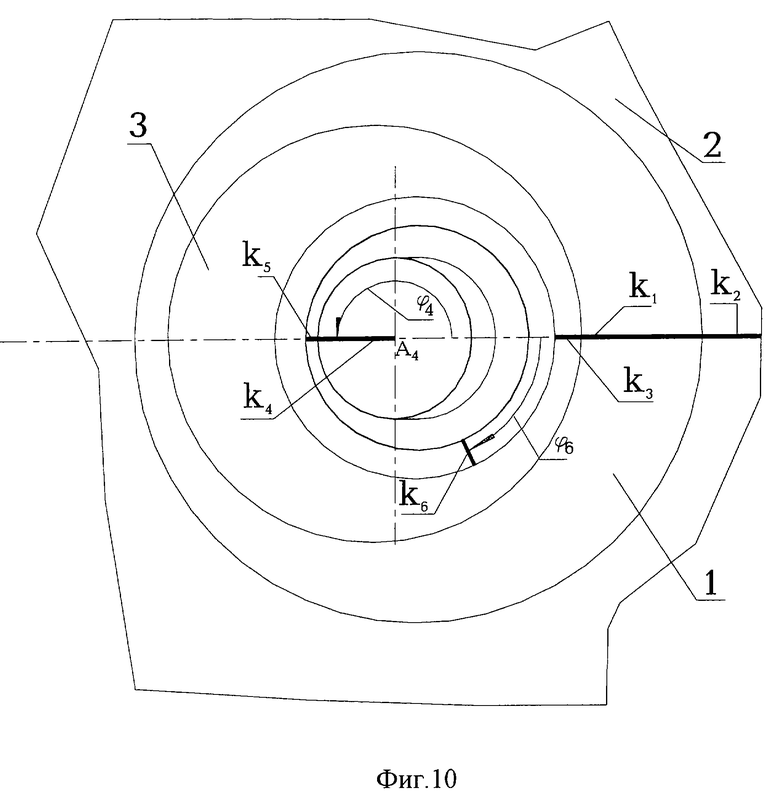
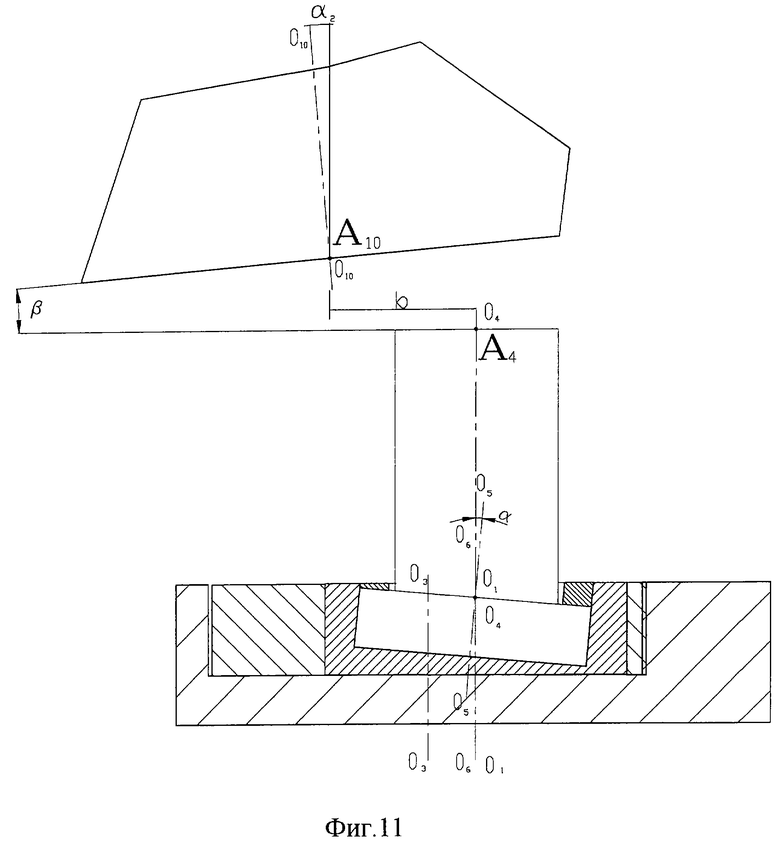
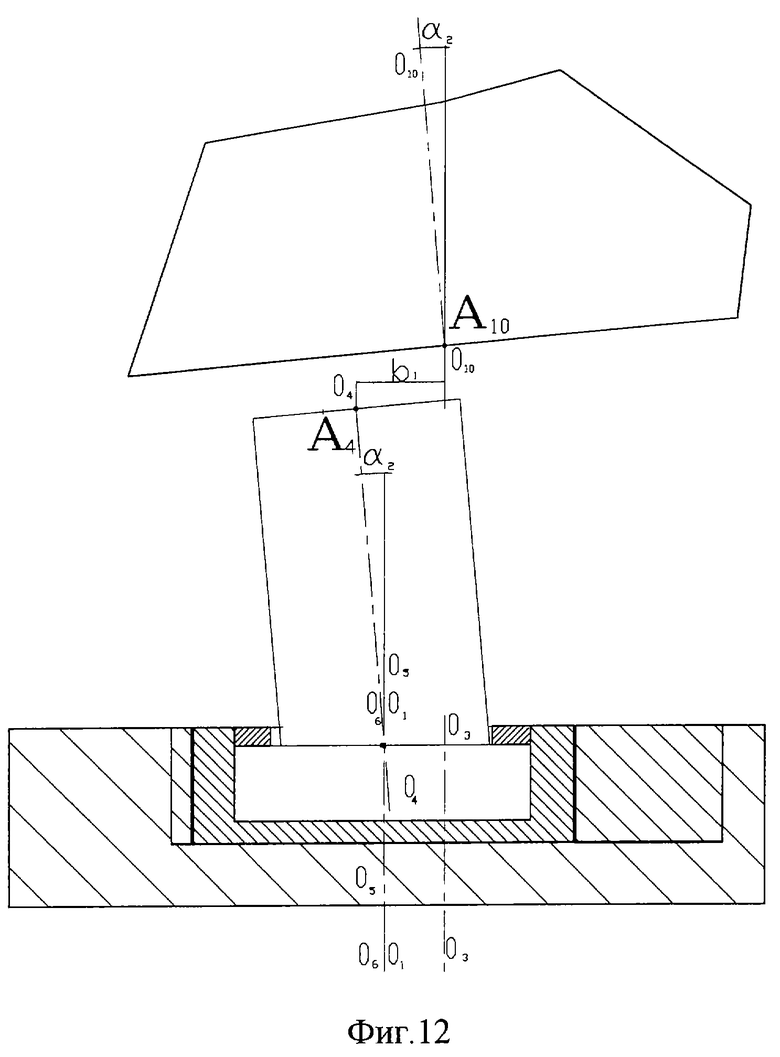
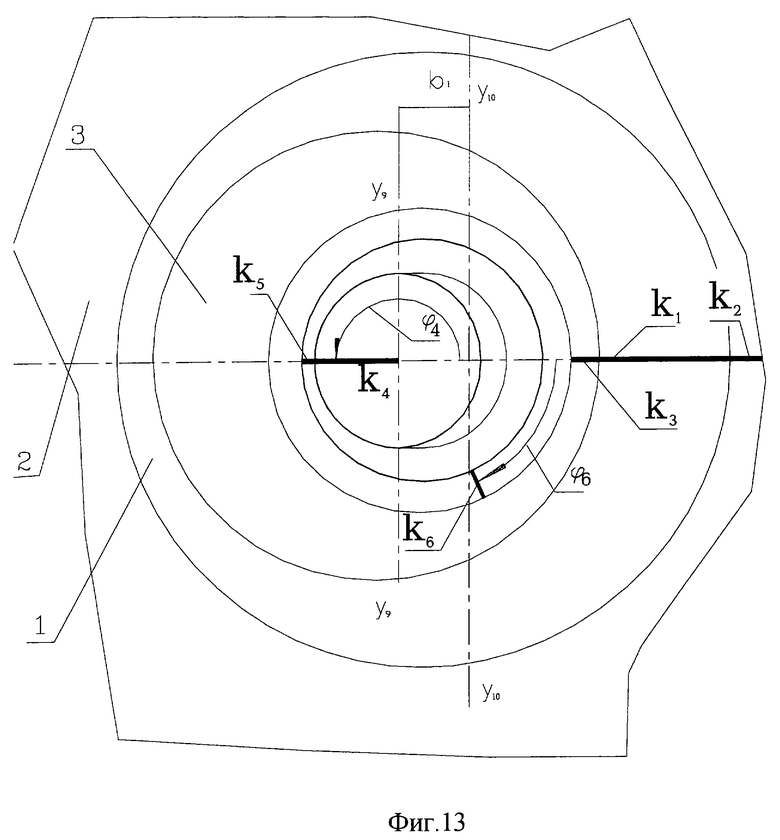
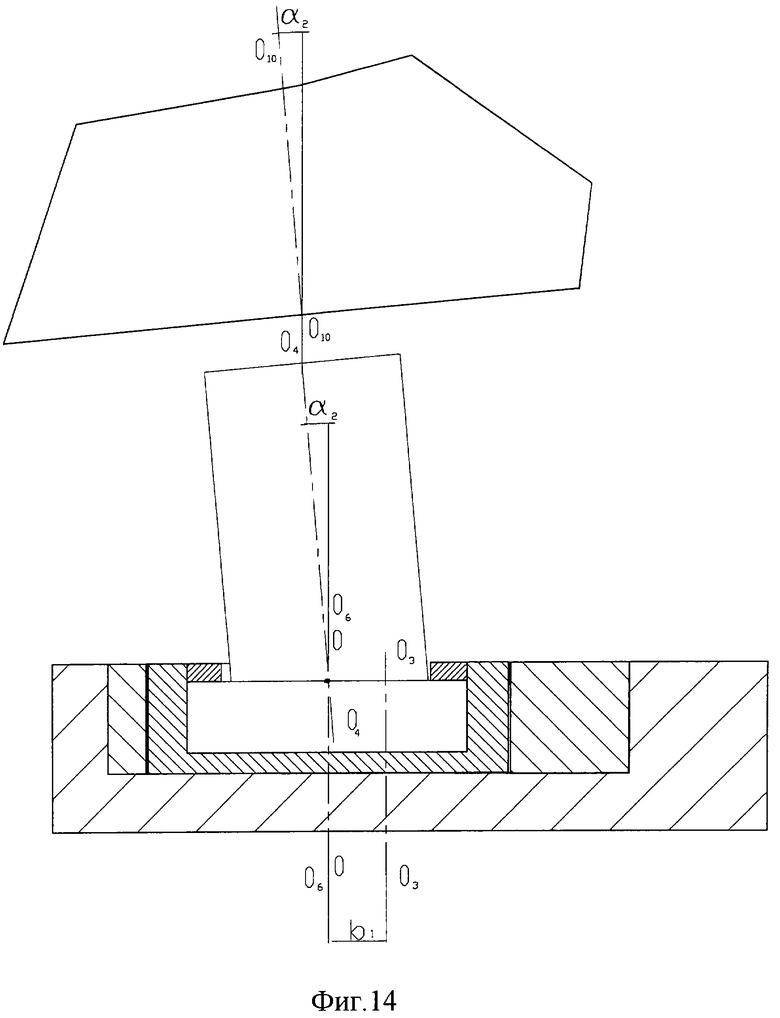
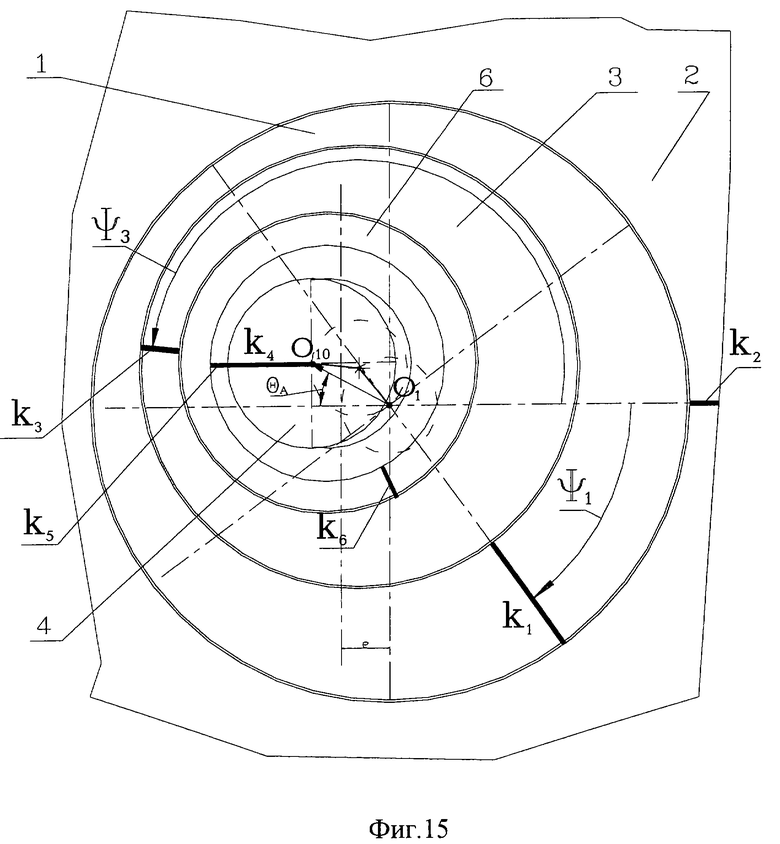
Сущность изобретения поясняется чертежами, где на фиг.1 представлена схема продольного сечения эксцентрикового узла и модуля, когда оси модуля и посадочного места в вакуумном корпусе совпадают; на фиг.2 - вид эксцентрикового узла сверху на фиг.1; на фиг.3 - продольное сечение стакана без опоры; на фиг. 4 - схема продольного сечении эксцентрикового узла и модуля в случае, когда оси модуля и посадочного места в вакуумном корпусе не совпадают; на фиг. 5 - вид эксцентрикового узла сверху на фиг.4; на фиг.6 - схема продольного сечения эксцентрикового узла и модуля после компенсации межосевого расстояния; на фиг. 7 - вид эксцентрикового узла сверху на фиг.6; на фиг. 8 - схема продольного сечения эксцентрикового узла и модуля в случае, когда плоскость посадочного места в вакуумном корпусе находится под острым углом к посадочному месту модуля; на фиг.9 - схема продольного сечения эксцентрикового узла и модуля после совмещения плоскости торца опоры с плоскостью посадки модуля; на фиг. 10 - вид эксцентрикового узла сверху на фиг.9; на фиг. 11 - схема продольного сечения эксцентрикового узла и модуля в случае, когда у посадочного места на модуле и посадочного места в вакуумном корпусе имеется межосевое расстояние, а также несовпадение осей по углу; на фиг. 12 - схема продольного сечения эксцентрикового узла и модуля в положении, когда плоскость торца опоры установлена параллельно посадочной плоскости модуля; на фиг. 13 - вид эксцентрикового узла сверху на фиг. 12; на фиг. 14 - схема продольного сечения эксцентрикового узла и модуля в положении компенсации углов и межосевых расстояний; на фиг. 15 - вид эксцентрикового узла сверху на фиг. 14.
Эксцентриковый узел состоит из внешнего эксцентрика 1, установленного в посадочном месте вакуумного корпуса 2. Внешний эксцентрик 1 изготовлен в виде диска с глухим эксцентричным отверстием, в котором расположен кольцевой эксцентрик 3. Эксцентриситет е1 внешнего эксцентрика 1 и эксцентриситет е3 кольцевого эксцентрика 3 равны между собой. Опора 4 снабжена фланцем 5. Фланец 5 опоры 4 помещен в стакан 6 и зафиксирован в нем прижимной деталью 7. Стакан 6 с опорой 4 установлен в кольцевом эксцентрике 3. Фланец 5 выполнен таким образом, что его ось (О5) образует с осью (О4) опоры 4 острый угол α.
Цилиндрическая полость 8 стакана 6, в которой закреплен фланец 5 опоры 4, выполнена наклонной относительно оси (О6) стакана 6, при этом угол наклона между осями (O8) и (О6) равен острому углу а между осями опоры 4 и фланца 5, соответственно угол наклона торцевой поверхности фланца 5 к основанию стакана 6 также равен острому углу α. Второй торец 9 опоры 4 состыкован с модулем 10, при этом ось (О4) опоры 4 совпадает с осью (О10) модуля 10 в месте стыковки, проходит через точку А4, являющуюся центром торца 9 опоры 4, точку А10 - центр на стыковочной поверхности модуля, а также через точку А2 - центр посадочного места на вакуумном корпусе 2. В исходном положении в эксцентриковом узле ось (О4) опоры 4 перпендикулярна центру посадочного места в точке А2, отверстия эксцентриков 1 и 3 максимально смещены в противоположные стороны, так что их эксцентриситеты e1 и е3 компенсируют друг друга и общий эксцентриситет равен нулю, при этом на верхней торцевой поверхности опоры 4, фланца 5, а также на стакане 6 и на эксцентриках 3 и 1 нанесены в одном радиальном направлении риски k4, k5, k6, k3, k1, а на поверхности вакуумного корпуса 2 от посадочного места в радиальном направлении имеется риска k2, выполненная в том же направлении что и риски k4, k5, k6, k3, k1, и служащая началом отсчета углов поворота опоры 4, стакана 6 и эксцентриков 1 и 3.
Эксцентриковый узел функционирует следующим образом.
Имеется вакуумный корпус термоядерного реактора, на который необходимо установить модуль. Изготовление и монтаж крупногабаритных деталей связано с разрешением таких проблем, как компенсация, заданных исходными данными, погрешностей изготовления конструкции и обеспечение точной установки модуля на вакуумном корпусе. Положение модуля заранее определено относительно координат реактора, а так как после сборки вакуумного корпуса, (габариты которого составляют ~12 м в высоту и ~16 м в ширину) появляются отклонения в параметрах положения и углах наклона оси посадочного места в вакуумном корпусе. Для компенсации указанных отклонений эксцентриковый узел настраивают таким образом, чтобы ось места стыковки модуля проходила через ось опоры.
Первый вариант - установка эксцентрикового узла в вакуумном корпусе в положении, когда ось посадочного места вакуумного корпуса соосна с осью модуля в месте его стыковки.
Эксцентриковый узел размещают в посадочном месте вакуумного корпуса 2, при этом внешний эксцентрик 1 и посадочное место вакуумного корпуса 2 соосны. Эксцентриковый узел приводят в исходное положение, для чего внешний эксцентрик 1 поворачивают вокруг своей оси (O1) в положение, при котором риска k1 на эксцентрике 1 совпадает с нулевой риской k2 на вакуумном корпусе 2, затем поворачивают кольцевой эксцентрик 3 так, чтобы риска k3 служила продолжением риски k1, при этом эксцентриситеты e1 и е3 эксцентриков 1 и 3 компенсируются. Стакан 6 с опорой 4 поворачивают в кольцевом эксцентрике 3 до положения, когда риски k6 и k4 совпадут с направлением нулевой риски k2 на вакуумном корпусе 2, при этом угол α между осью (О6) стакана 6 и осью (O8) наклонной цилиндрической полости 8, компенсируется углом α, который образован между осью (O4) опоры 4 и осью (О5) фланца 5, после чего ось (O4) опоры 4 принимает положение, соосное посадочному месту на вакуумном корпусе 2. Далее фланец 5 закрепляют в стакане 6 прижимной деталью 7, эксцентрики 3 и 1 фиксируют в вакуумном корпусе 2, после чего эксцентриковый узел готов к стыковке модуля с вакуумным корпусом 2.
Второй вариант - установка эксцентрикового узла в вакуумном корпусе в положение, когда ось модуля в месте стыковки и ось посадочного места в вакуумном корпусе параллельны, но не совпадают.
Перед установкой эксцентрикового узла в посадочное место вакуумного корпуса 2 определяют расстояние b между осью (О10) модуля 10 и осью (O1) внешнего эксцентрика 1, при этом b≤2е. Затем в посадочном месте размещают эксцентриковый узел, находящийся в исходном положении. На оси (O2) посадочного места определяют точку L, являющуюся пересечением трех осей: оси (O4) опоры 4, оси (O5) фланца 5 и оси (O2) посадочного места, которую условно принимают за начало системы координат в плоскости параллельной плоскости посадочного места вакуумного корпуса 2, а радиальное направление в этой плоскости, совпадающее с направлением нулевой риски k2 условно обозначают осью х. В исходном положении точка А4 на торцевой поверхности опоры 4 и точка L находятся на одной оси, а вектор А4А10, соединяющий точки А4 и А10, равен расстоянию b между осью модуля 10 и осью опоры 4 и образует с осью х (с одной из главных осей координат) угол θA. Поворачивая внешний эксцентрик 1 на угол Ψ1, a кольцевой эксцентрик 3 на угол Ψ3, опора 4 перемещается вместе с эксцентриками 1 и 3, в результате чего точка А4 опоры 4 принимает в системе координат положение, совпадающее с точкой А10. Углы поворота внешнего и внутреннего кольцевого эксцентриков 1 и 3 определяют по формулам:

где:
Ψ1 - угол вращения внешнего эксцентрика 1;
Ψ3 - угол вращения кольцевого эксцентрика 3;
b - межосевое расстояние;
е - экцентриситет;
θA - угол между вектором А4А10 и осью х.
Таким образом, вращая эксцентрики 1 и 3 приводят их в такое положение, при котором риски k1 и k3 образуют с осью х соответственно углы Ψ1 и Ψ3, что приводит эксцентриковый узел в положение соосности оси (O4) опоры 4 с осью (О10) модуля, затем эксцентрики 3 и 1 фиксируют в вакуумном корпусе 2.
Третий вариант - установка эксцентрикового узла в случае, когда плоскость посадочного места в вакуумном корпусе находится под острым углом β к посадочной плоскости на модуле, при этом β≤2α.
Установку эксцентрикового узла в заданное положение осуществляют следующим образом. Эксцентриковый узел устанавливают в посадочное место вакуумного корпуса 2 в исходном положении. Затем стакан 6 вместе с опорой 4 поворачивают в кольцевом эксцентрике 3 относительно нулевой риски k2 на угол ϕ6, при этом ось (O5) фланца 5 совершает вращение вокруг оси (О2) посадочного места на вакуумном корпусе и занимает положение, в котором образует угол α с осью (О10) модуля 10, при этом ось (O4) опоры и ее центральная точка А4 остаются соосными оси (О2). Далее опору 4 поворачивают в стакане 6 относительно нулевой риски k2 на угол ϕ4, при этом ось (O4) опоры 4 совершает вращение вокруг оси (O5) фланца 5 и становится соосной с осью (О10) модуля 10, торцевая поверхность 9 опоры 4 становится к посадочной плоскости вакуумного корпуса под углом β, что и стыковочная плоскость модуля 10, при этом центральная точка А4 опоры 4 соосна центральной точке А10 на модуле 10, а ось (O4) образует с осью (O2) угол β.
Ось модуля (О10) образует с осью посадочного места на вакуумном корпусе (O2) угол β; зная величину этого угла и расстояние между точками A4 и L равное высоте опоры Н, определяют углы поворота стакана 6 ϕ6 и опоры 4 ϕ4 относительно нулевой риски k2 из следующих формул: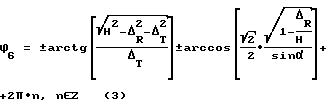
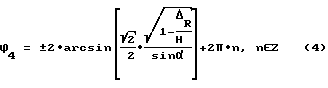
где: α - острый угол между осью опоры и осью фланца;
Н - высота опоры между точками А4 и L ;
ΔR - расстояние от точки А4 до плоскости, проходящей через точку L параллельно плоскости посадочного места вакуумного корпуса, зависящее от угла β;
ΔT - проекция высоты опоры Н на радиус нулевой риски k2, зависящая от угла β.
Четвертый вариант - установка эксцентрикового узла в вакуумном корпусе в случае, когда у посадочного места на модуле и посадочного места в вакуумном корпусе имеется межосевое расстояние, а также угловое несовпадение осей.
Перед установкой эксцентрикового узла в посадочное место вакуумного корпуса 2 определяют расстояние b между осью (О10) модуля 10 и осью (О2) посадочного места вакуумного корпуса 2, а также угол β наклона между плоскостями стыковки. Затем эксцентриковый узел размещают в посадочном месте вакуумного корпуса 2 в исходном положении. Регулировку эксцентрикового узла осуществляют в следующей последовательности в два этапа: на первом этапе определяют по формулам (3), (4) углы поворота ϕ6 стакана 6 и ϕ4 опоры 4 относительно нулевой риски k2, необходимые для приведения торцевой поверхности 9 опоры 4 в положение параллельное стыковочной плоскости модуля 10. На втором этапе по формулам (1), (2) определяют углы поворота Ψ1/ внешнего эксцентрика 1 и Ψ3 кольцевого эксцентрика 3 относительно нулевой риски k2, после чего осуществляют поворот эксцентриков 1 и 3 на заданные углы Ψ1 и Ψ3.
Таким образом, предлагаемый эксцентриковый узел позволяет повысить точность сборочных работ крупногабаритных конструкций, использовать при этом разъемные механические соединения. Предлагаемая конструкция обеспечивает компенсацию погрешностей при монтаже крупногабаритных узлов с соединяемыми узлами до ±10 мм при осевых ошибках; ±5 мм при боковых несовпадениях осей; а также угловые ошибки ±25 мрад (+1,43o), что повышает надежность конструкции.
Изобретение относится к машиностроению и строительной индустрии и в частности, к эксцентриковым узлам для установки модулей на вакуумном корпусе термоядерного реактора. Сущность изобретения заключается в том, что в эксцентриковом узле, содержащем кольцевой эксцентрик, опору и прижимную деталь, узел снабжен внешним эксцентриком в виде диска с глухим отверстием, в нем установлен кольцевой эксцентрик, при этом эксцентриситеты обоих эксцентриков равны между собой, а опора снабжена фланцем, который закреплен прижимной деталью в стакане, установленном в кольцевом эксцентрике, причем ось фланца образует с осью опоры острый угол, а цилиндрическая полость стакана выполнена наклонной относительно его оси и имеет угол наклона, равный углу между осями опоры и фланца. Технический результат заключается в повышении надежности и точности регулировки установки опор при сборке крупногабаритных конструкций за счет компенсации линейных погрешностей в габаритах, а также при боковых несовпадениях осей. 15 ил.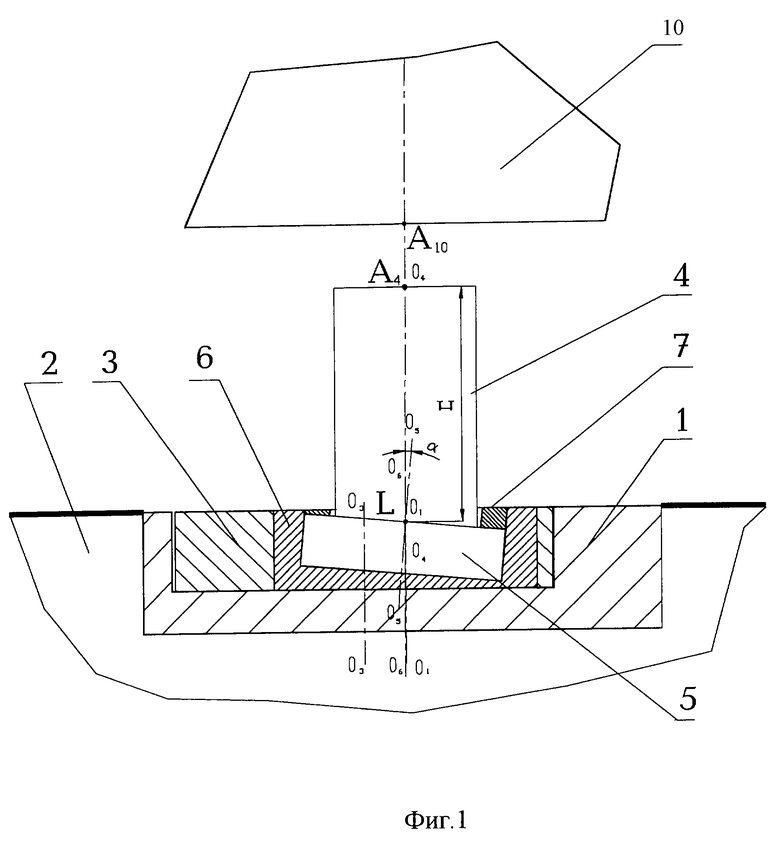
Эксцентриковый узел, содержащий кольцевой эксцентрик, опору и прижимную деталь, отличающийся тем, что узел снабжен внешним эксцентриком в виде диска с глухим отверстием, в нем установлен кольцевой эксцентрик, при этом эксцентриситеты обоих эксцентриков равны между собой, а опора снабжена фланцем, который закреплен прижимной деталью в стакане, установленном в кольцевом эксцентрике, причем ось фланца образует с осью опоры острый угол, а цилиндрическая полость стакана выполнена наклонной относительно его оси и имеет угол наклона, равный углу между осями опоры и фланца.
| ЭКСЦЕНТРИКОВАЯ ОПОРА | 0 |
|
SU200354A1 |
| Регулируемый эксцентриковый узел | 1980 |
|
SU947493A1 |
| US 3798996 26.03.1974. | |||

